
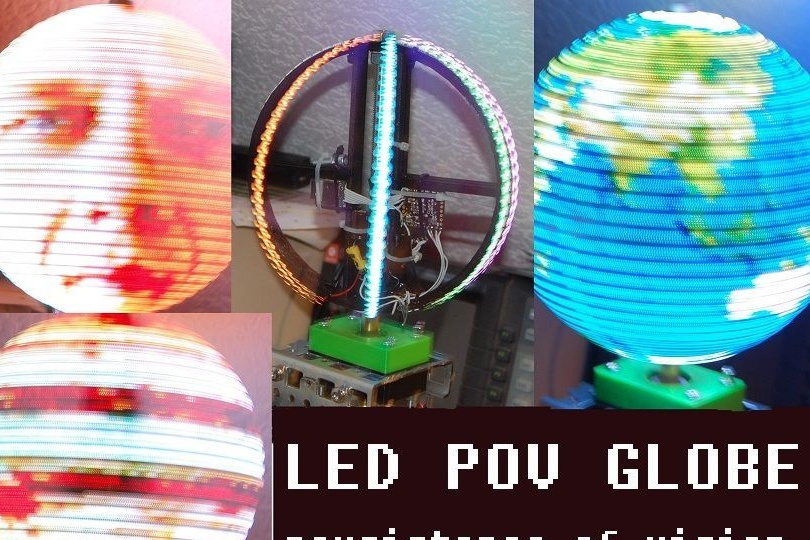
Ang tutorial na ito ay tungkol sa kung paano bumuo ng isang POV globo na may mas kaunti. electronic mga sangkap kaysa sa iba pang mga katulad na aparato. Sa pamamagitan ng paggamit ng RGB LEDs sa isang integrated APA102 controller. Makakatipid ka nito sa paghihinang ng maraming mga wire. Maaari mong basahin ang higit pa tungkol sa mga ito. Ang mga LED na ito ay hindi nangangailangan ng isang karagdagang driver. Ang mga ito ay konektado nang direkta sa microcontroller sa dalawang paraan. Pinapayagan ka nitong lumipat nang mabilis sa mga LED. Upang makakuha ng isang matatag na larawan, ang pag-synchronize ng SPI ay dumarating sa dalas ng 10 MHz. Ang isa pang plus ng disenyo na ito ay ang paggamit ng isang flash card, na nag-iimbak ng imahe sa format na BMP.
1 Mga kinakailangang materyales

Para sa axis ng mundo kakailanganin mo:

1. Pag-aaral na may M8 thread at isang haba ng 250 mm
2. Nut M8
3. Ang tanso ng brass na 10 mm at 100 mm ang haba
4. Mga plastik na tagapaghugas ng 8mm 2 piraso (kasama ang mga file na STL)
5. pagkabit para sa mga gagamit ng stepper motor NEMA 17
Upang ma-lakas ang singsing ng LED sa baras, kakailanganin mo
1. ball bear 6300 (10x35x11)
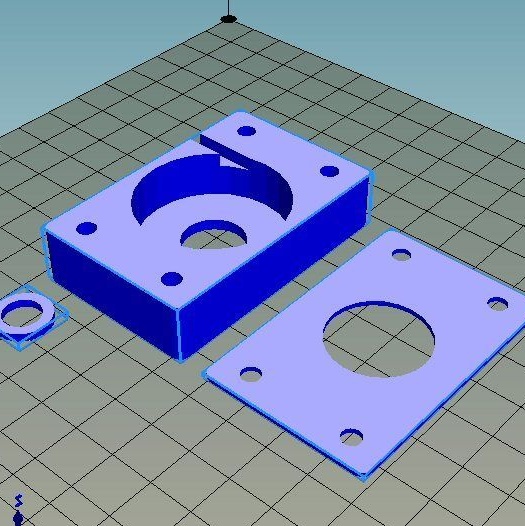
2. dalawang bracket para sa mga bearings. Naka-print sa isang 3d printer o gawa sa kahoy.
3. Apat na M4x40 bolts na may mga mani
4. Mga tip sa mga wire 2 pcs 8mm
5. na may diameter ng baras ng 5mm
6. 4 bolts M4 para sa pag-mount ng engine
7. marahil isang tagahanga dito.
Bilang kahalili, maaari mong gamitin ang anumang engine na may tamang metalikang kuwintas at kontrol ng bilis. Ang motor na ginamit sa disenyo na ito ay may isang maximum na metalikang kuwintas sa isang kasalukuyang 50A, ngunit ang maximum na kasalukuyang pagkonsumo sa panahon ng operasyon ay 18A lamang.
Upang makontrol ang driver ng servomotor, gamitin
1.
2. dalawang pindutan
Ang power supply 12V para sa motor at 5V para sa mga LED. Bilang suplay ng kuryente, maaari mong gamitin ang lumang yunit mula sa PC. Maaari kang bumili ng isang 12v / 5A supply ng kuryente at kumonekta dito
Para sa LED singsing kakailanganin mo:
1.664 LEDs 2 piraso ng 32 piraso
2. Capacitor 1000µF 10V
3. Hall sensor at magnet
4. Ang pull-up resistor 1k, 10k
5. Ang singsing ay dapat na mai-print sa isang 3D printer o gumamit ng isang piraso ng PVC pipe
6. Mga plastik na kurbatang (100 mm)
7. Ang isang mahusay na pandikit na magkatabi at hindi lumipad nang 2500 rpm
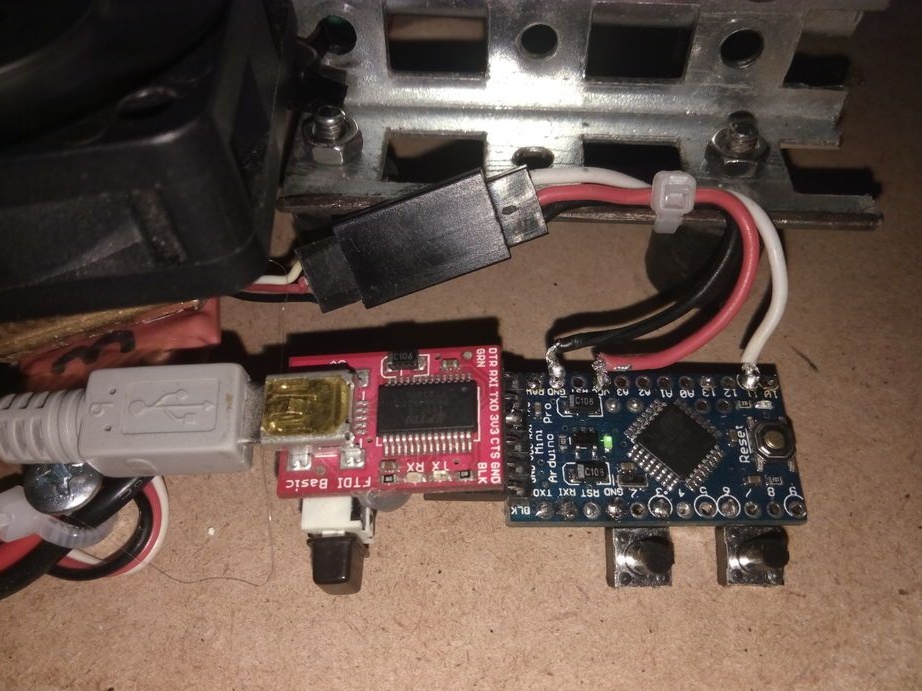
Kakailanganin mo rin ang isang Microcontroller ng Parallax Propeller. O maaari kang gumamit ng isa pa ang modelo magsusupil, ngunit bilang karagdagan, kumuha ng bayad para sa. Ang magsusupil na ito ay nai-program at flashed kasing simple ng Arduino. Kakailanganin mo ang isang USB-TTL adapter sa programa ng parehong mga controller.
Katawan.
Pabahay para sa gawang bahay Maaari kang kumuha ng anumang sapat na mahirap. Ang pinakamahalagang bagay ay ang motor at bearings ay maaaring mai-secure ng sapat na maaasahan.
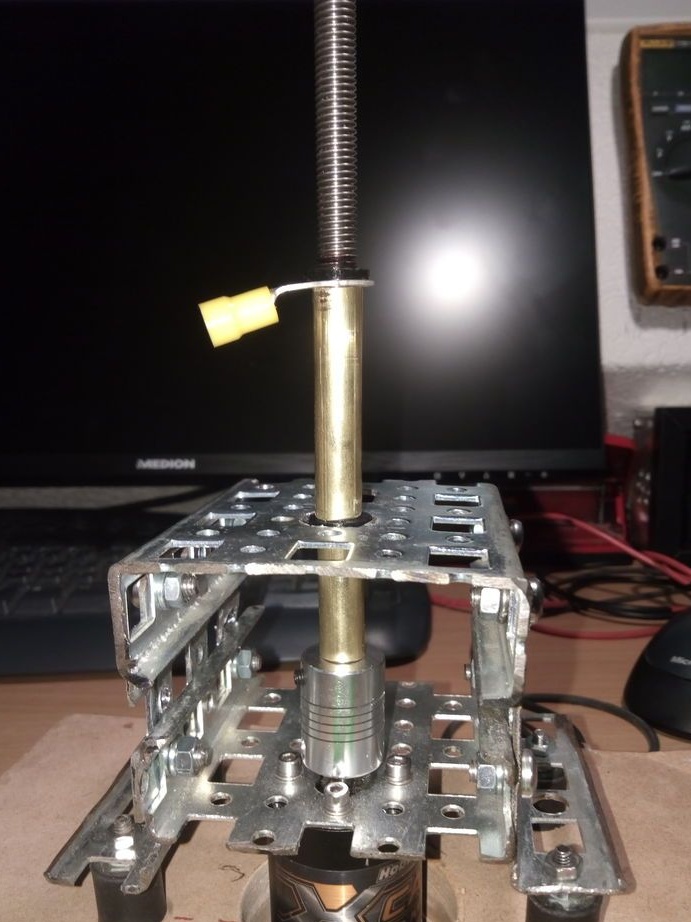
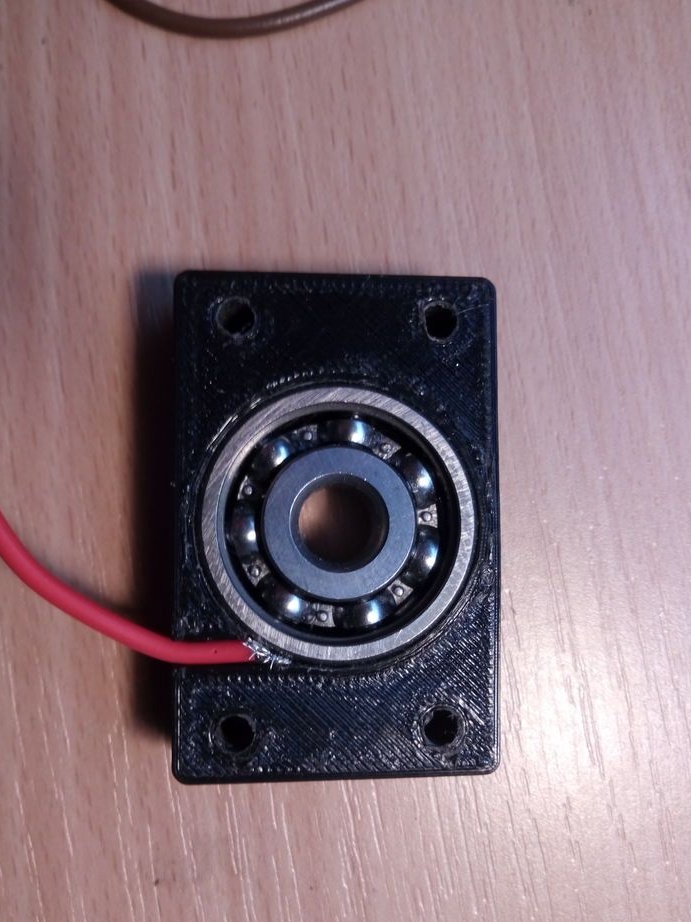
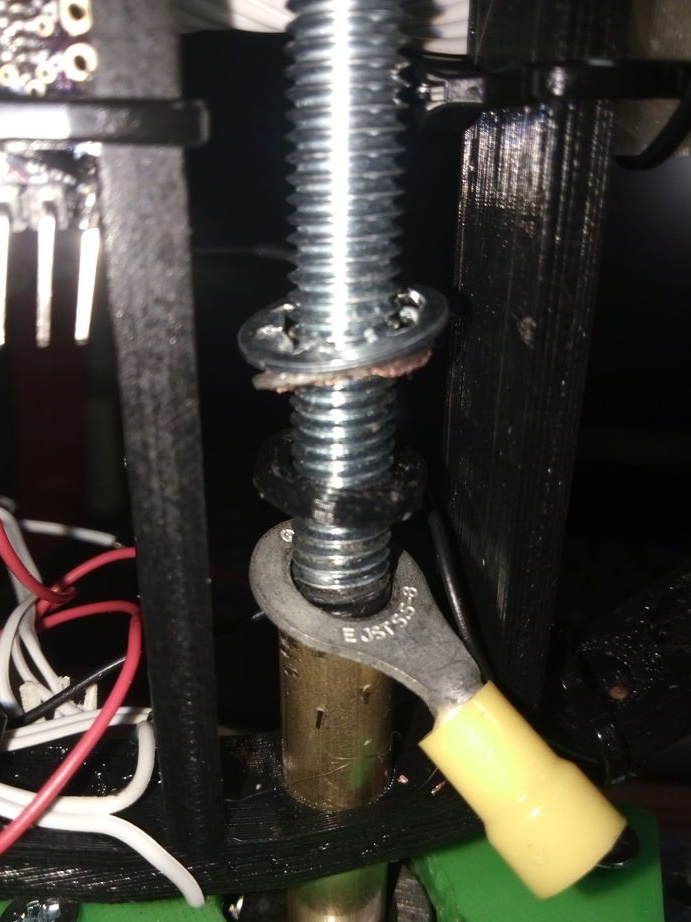
Ang isang 250 mm mahabang palahing kabayo ay ginagamit para sa drive shaft.Ang haba ng tanso na bushings ay 50 at 30 mm. Depende sa laki ng singsing at haba ng baras. Ang itaas at mas mahabang manggas ay dapat na ihiwalay mula sa palahing kabayo, sapagkat ginagamit ito upang magbigay ng dagdag na kapangyarihan sa mga LED. Upang gawin ito, balutin ang mga de-koryenteng tape sa isang hairpin o gumamit ng pag-urong ng init, kakailanganin din ang dalawang plastic washers. Ang manggas ay kailangang ma-drill sa 8.5-9mm kung hindi man ito magkasya. Ang iba pang manggas kasama ang baras ay bumubuo ng isang negatibong pakikipag-ugnay.
Ang minus power ay inilalagay sa isang espesyal na uka at pinindot laban sa tindig sa bracket, na maaaring mai-print sa isang printer. Bracket STL file sa archive.


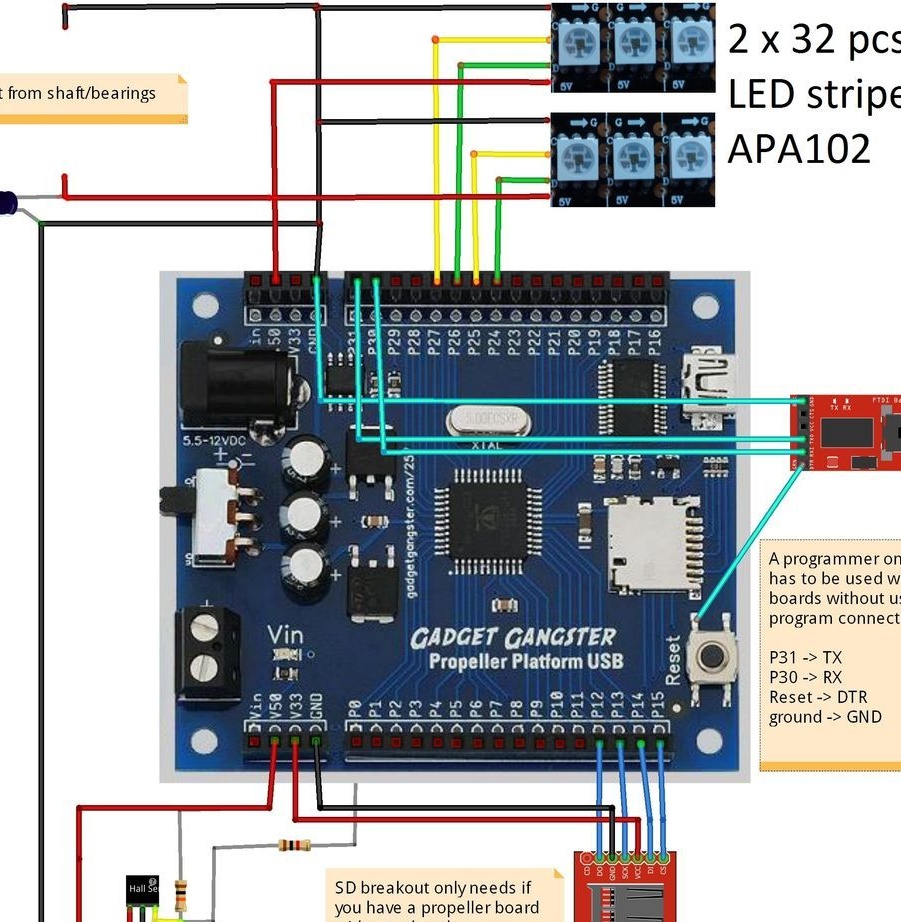
Ngayon kailangan mong ikonekta ang electric motor, tulad ng ipinapakita sa diagram.
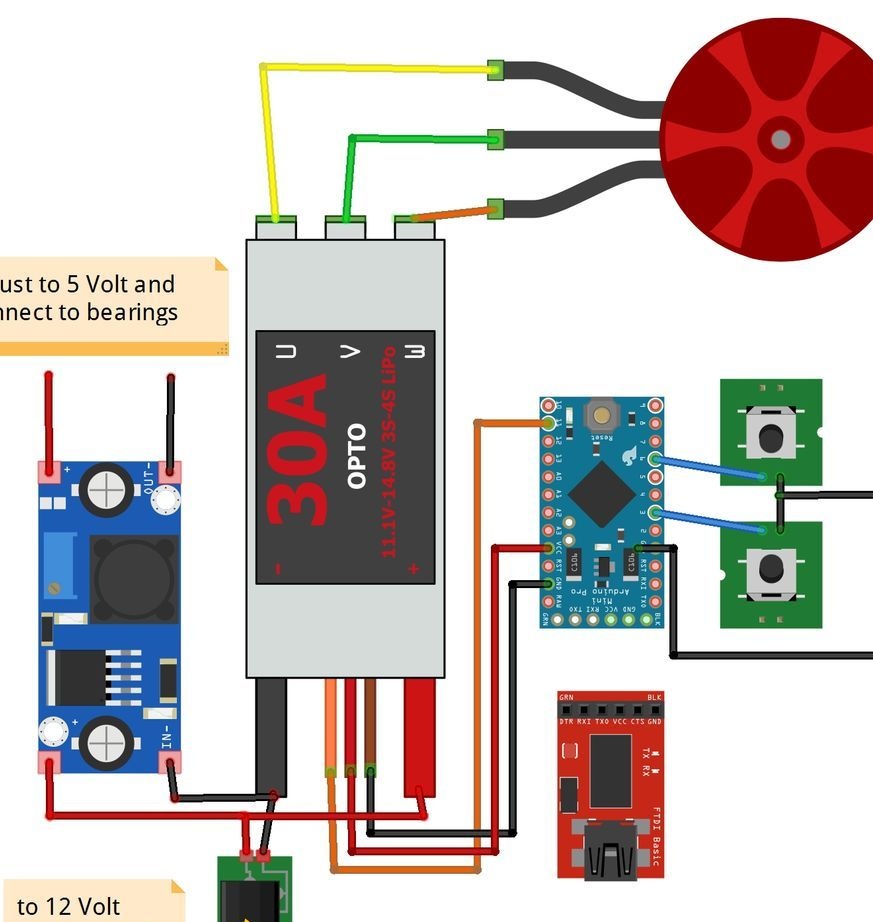
Ang dalawang mga pindutan sa diagram ay ginagamit upang ayusin ang bilis. Kapag binuksan mo ang lakas, ang ESC ay makakatanggap ng isang halaga ng 500 μs. Pindutin ang isa sa mga pindutan upang i-on ang makina. Ang sketch ay kukuha ng halaga ng "StartPos = 625". Mamaya, kapag inaayos mo ang bilis, maaaring mabago ang halagang ito. Pindutin ang pindutan para sa dalawang segundo at dapat huminto ang engine.
Assembly ng pangunahing istraktura.
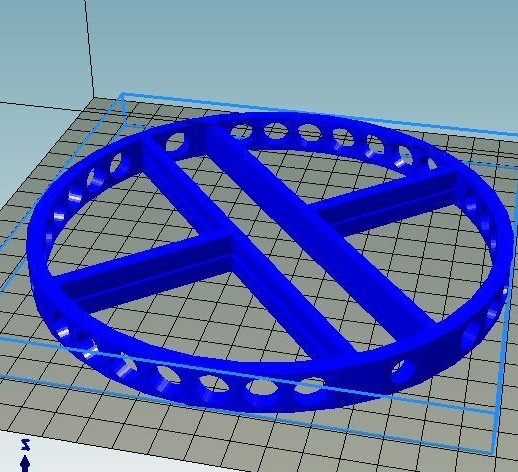

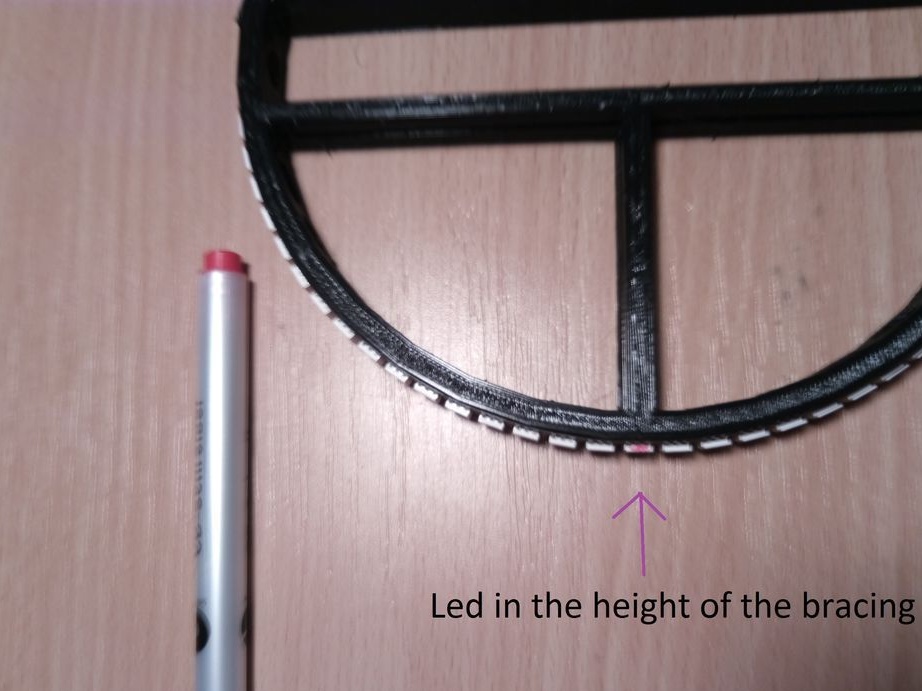
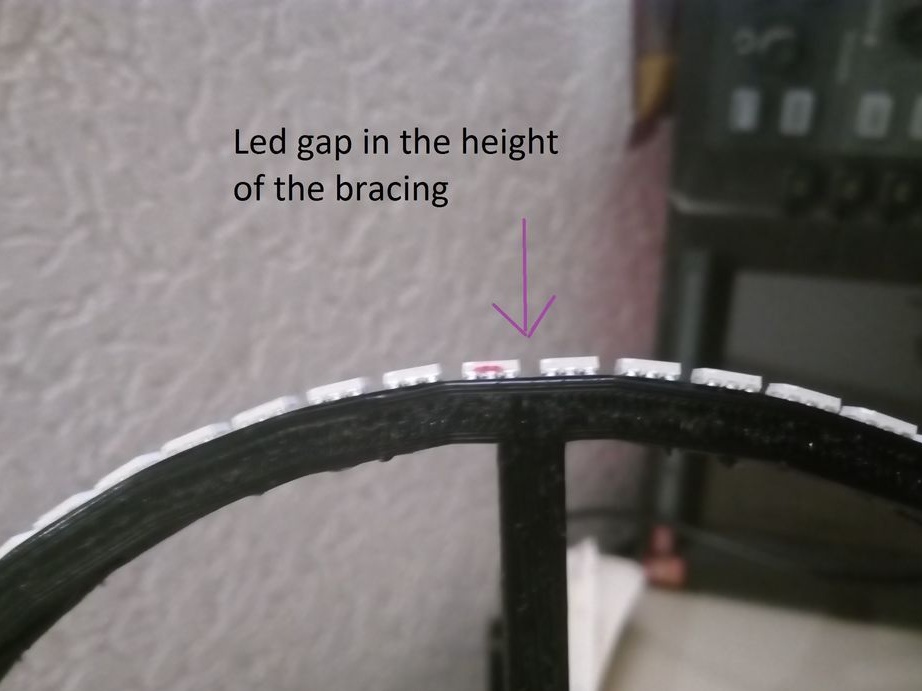


Upang gawin ito, i-print ang singsing mismo mula sa nakalakip na file. Ang may-akda ay gumawa ng maraming mga butas upang mabawasan ang timbang. Maaari kang gumamit ng isang piraso ng pipe ng PVC. Dalawang piraso ng 32 LEDs ay pinutol. Dalawang piraso ng LEDs ay bumubuo kahit na at kakaibang mga linya. Ayusin ang mga teyp upang ang mga LED ng isang strip ay matatagpuan sa pagitan ng mga LED ng iba pang, ngunit sa reverse side. Pagkatapos mong i-fasten ang tape, maaari mong ikonekta ang mga LED control ng board. At pagkatapos ay kailangan mong balansehin ang buong pagpupulong.
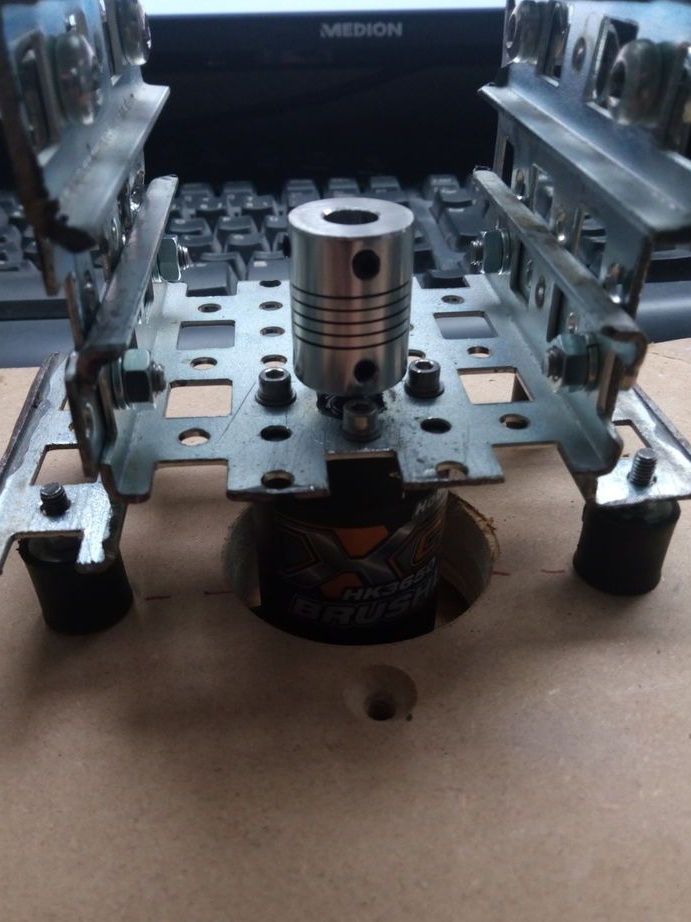
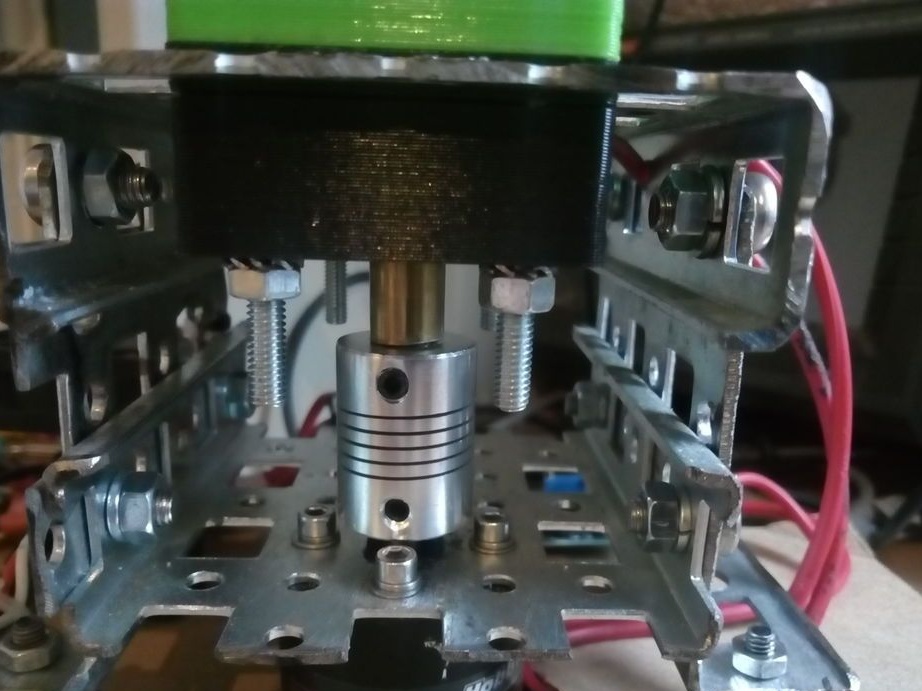
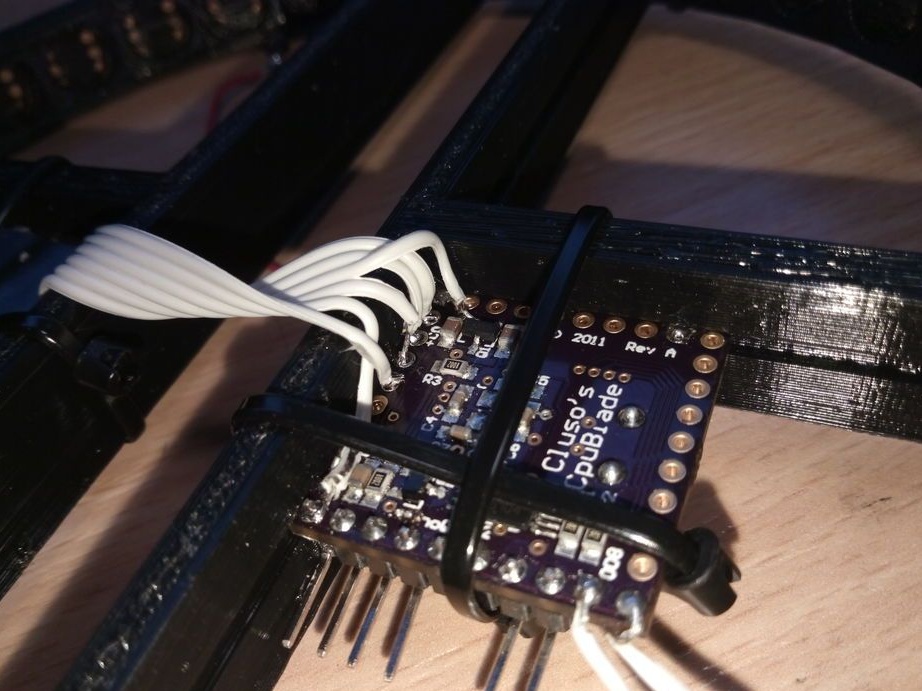
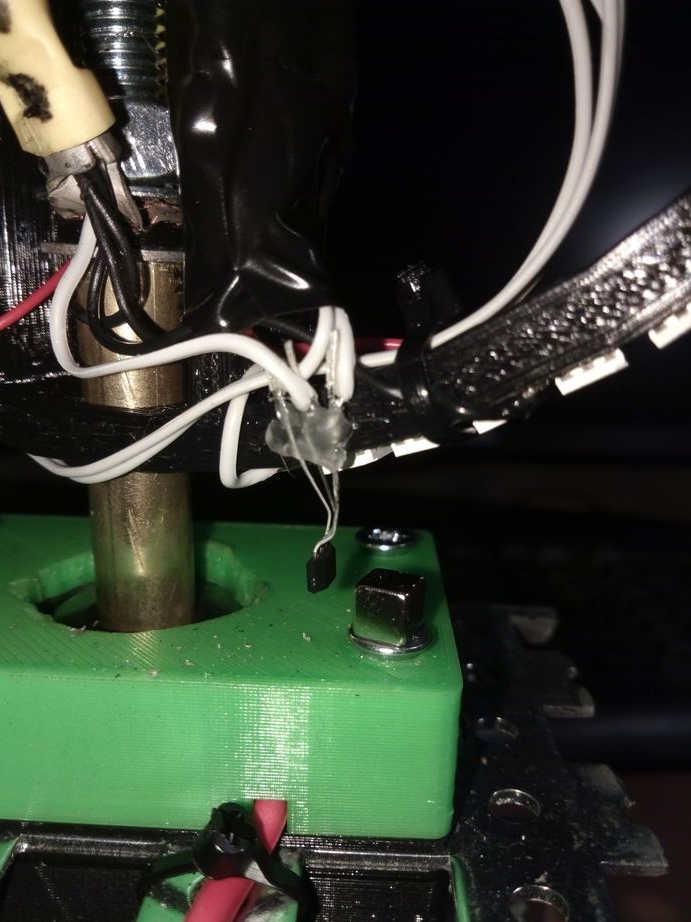
Ang mga sumusunod na larawan ay nagpapakita kung paano magkasama ang lahat ng mga sangkap ng aparato nang magkasama. Ipinapakita rin ng larawan ang naka-install na sensor ng hall na may isang magnet.
Upang i-program ang Parallax Propeller Microcontroller na kailangan mo
HUWAG ikonekta ang iyong kagamitan sa isang USB o serial port hanggang sa mai-install mo ang software. Higit pang mga detalye tungkol sa pag-upload ng firmware sa Parallax ay matatagpuan
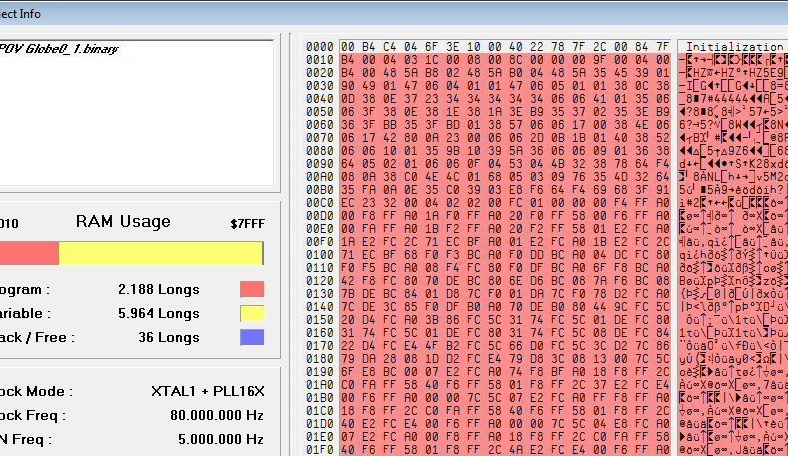
Gumagamit ang may-akda ng isang mas matanda at, nang naaayon, hindi gaanong matipid, sa mga tuntunin ng pagkonsumo ng enerhiya, ang MCU board dahil hindi siya makakahanap ng mga bagong aklatan sa bagong mga board ng controller.
Matapos mong kolektahin at ikonekta ang lahat, kailangan mong i-program ang controller. Ginagawa ito ng may-akda sa tulong. Mga file na may firmware sa archive.
Ngayon ay maaari mong subukang simulan ang aparato. Mula sa simula, kopyahin ang larawan ng pagsubok sa SD card at i-paste ito sa puwang.
• Kung pinaikot mo ang singsing sa pamamagitan ng kamay, dapat na kumurap ang mga LED sa tuwing ipinapasa ng sensor ng hall ang magnet
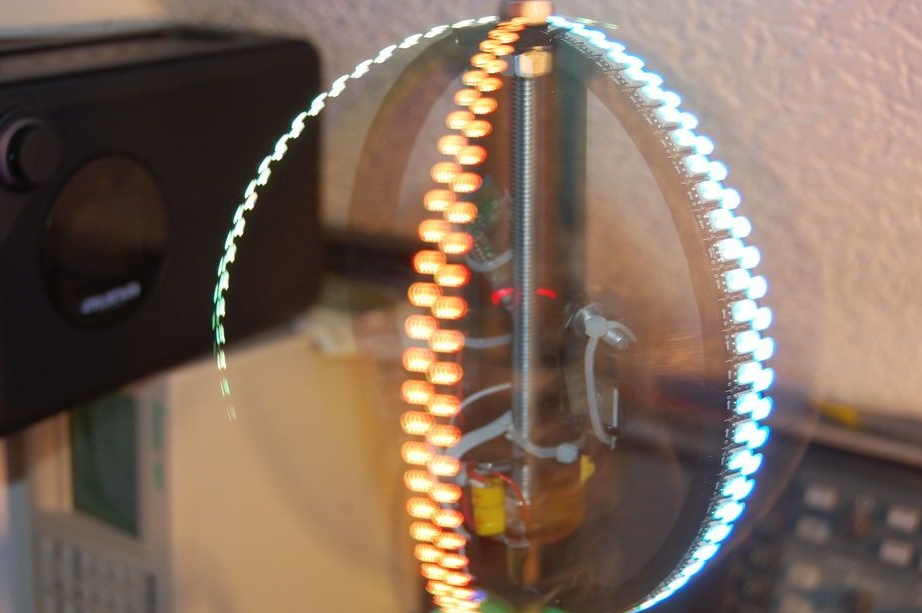
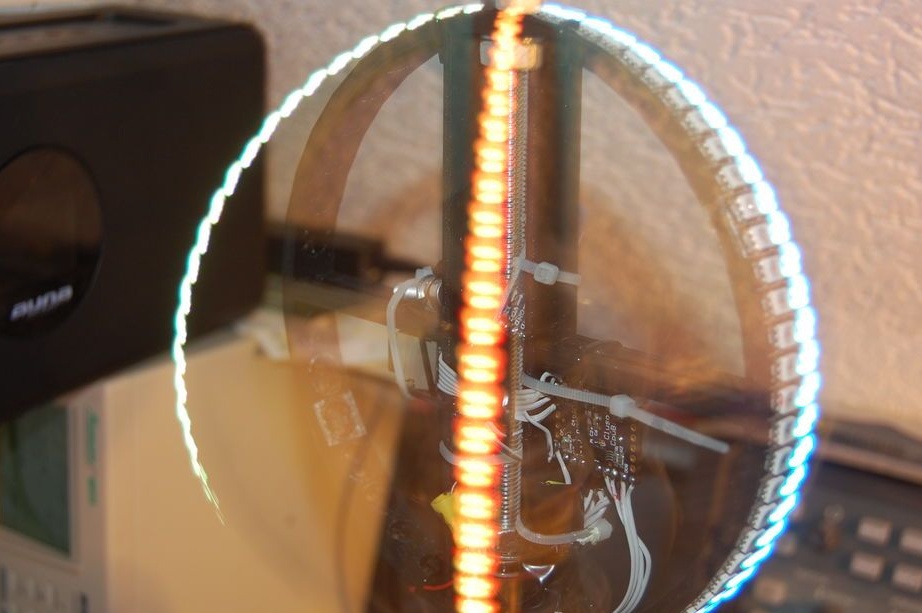
• I-on ang makina. Ang pagtaas ng bilis sa mga pindutan, kinakailangan upang matiyak na ang mga LED ay lumiwanag tulad ng ipinapakita sa 2 mga larawan
• Ikonekta ang terminal ng Arduino sa motor controller.
• Alalahanin ang ipinakita na halaga.
• Pahinto ang makina
• Isulat ang dating naka-imbak na halaga sa variable "simulaPos"sketch POV_MotorControl
• Programa muli ang Arduino.
Sa susunod na magsisimula ang iyong motor sa tamang bilis. Ngayon ay maaari mong "Punan" sa mapa ang anumang imahe. Upang gawin ito, kailangan mong baguhin ang laki ng imahe sa pamamagitan ng 120x64 na mga piksel, paikutin ang imahe na counterclockwise ng 90 degree, at patayo nang salamin. Bawasan ang ningning ng imahe, dahil ang mga LED ay masyadong maliwanag. Upang gawin ito, mas mahusay na gumamit ng pagwawasto ng gamma na may koepisyent na 0.45.
I-save ang imahe bilang BPM 24 bit nang walang compression. Matapos ang lahat ng mga pagmamanipula, ang laki ng file ay ang laki 23094 byte.



