Ang kanyang lakad ay halos kapareho ng isang tunay na ipis. Kapag naglalakad, ito ay lumipat ng kaunting hakbang na may kumpiyansa na pasulong. Ang ipis ay may isang minimum na mga kumplikadong bahagi at napakadaling paggawa.
1. Pagsubok sa video
Ang video ay nagpapakita ng isang mekanikal na ipis mula sa iba't ibang mga anggulo sa panahon ng operasyon at paggalaw nito.
2. Mga katangian at tampok.
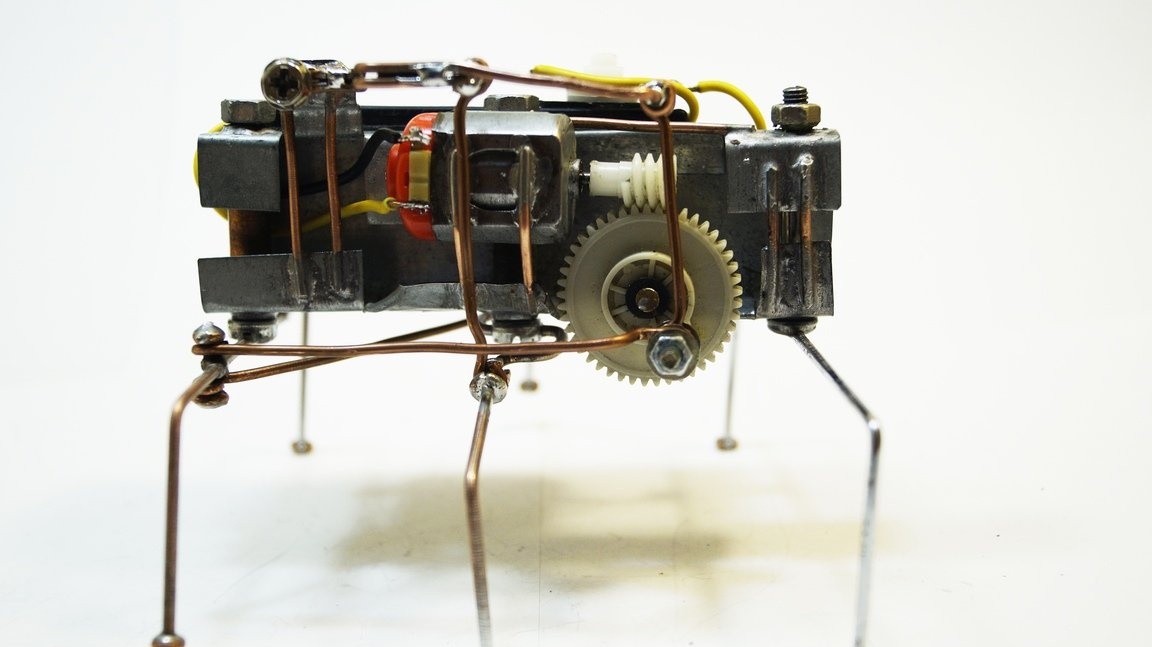
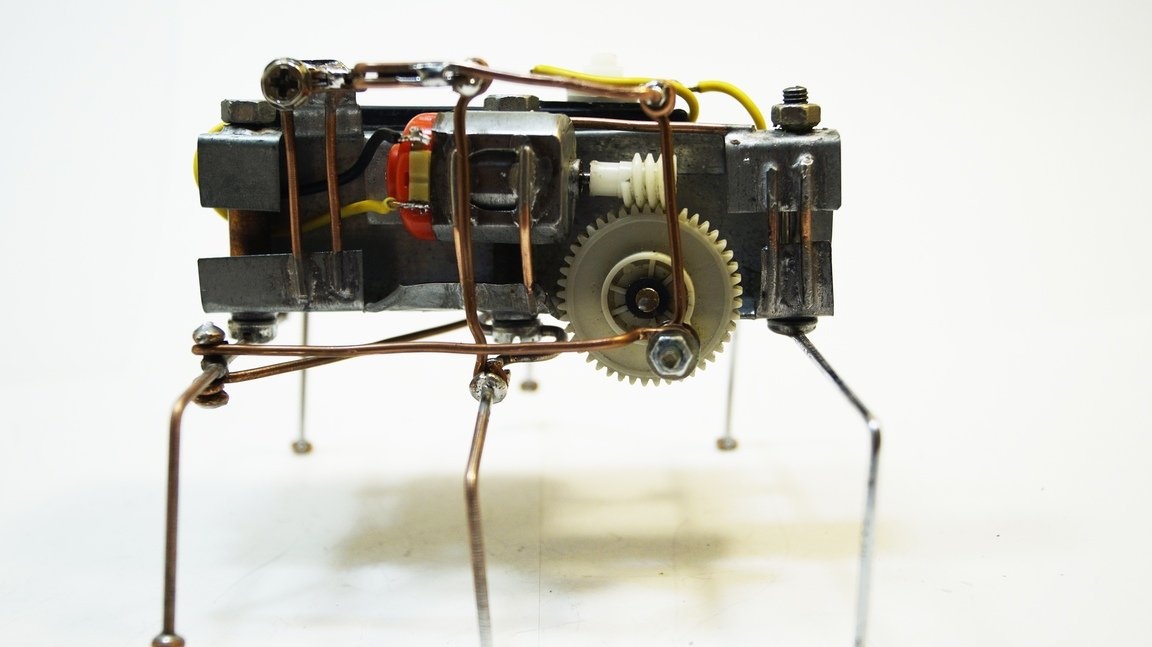
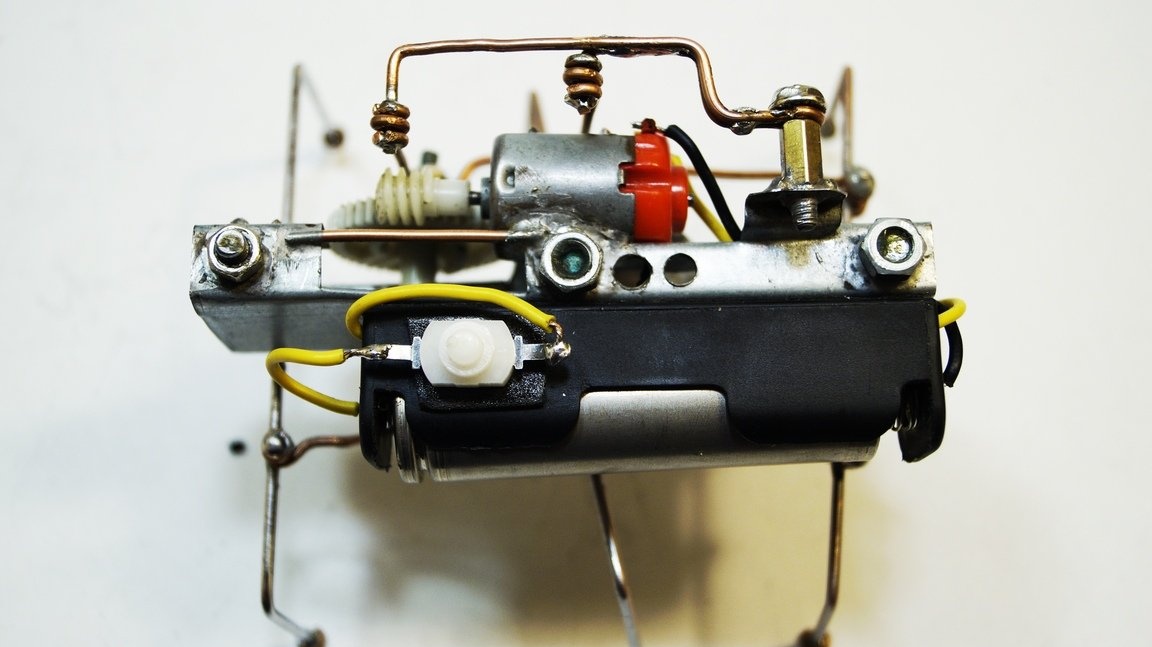
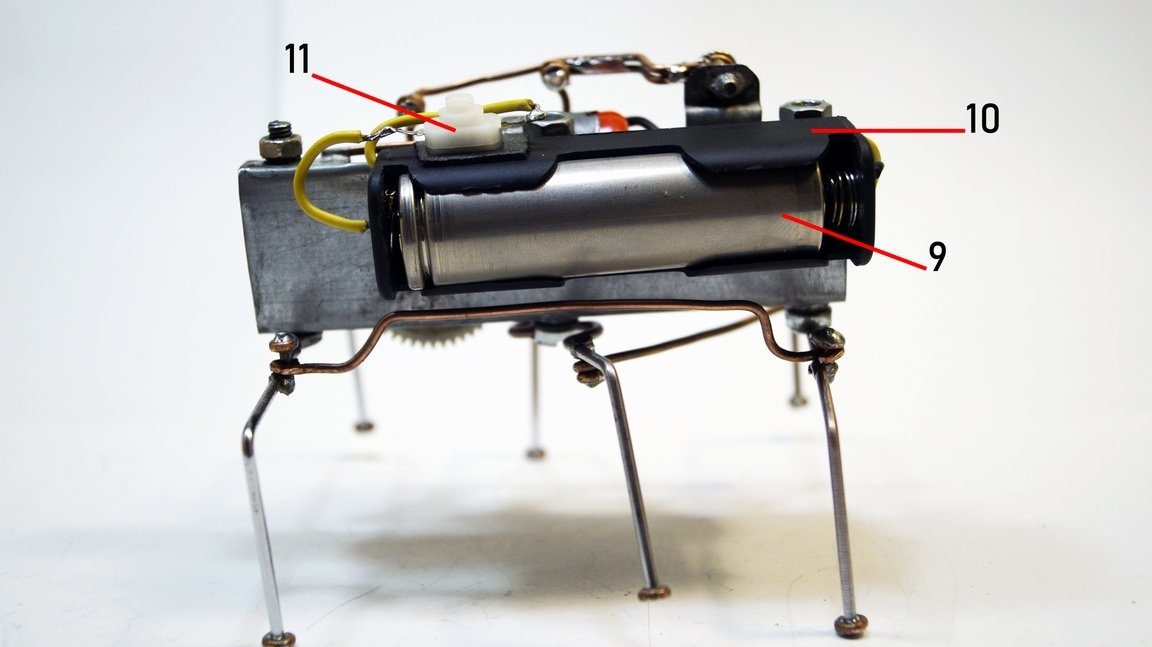
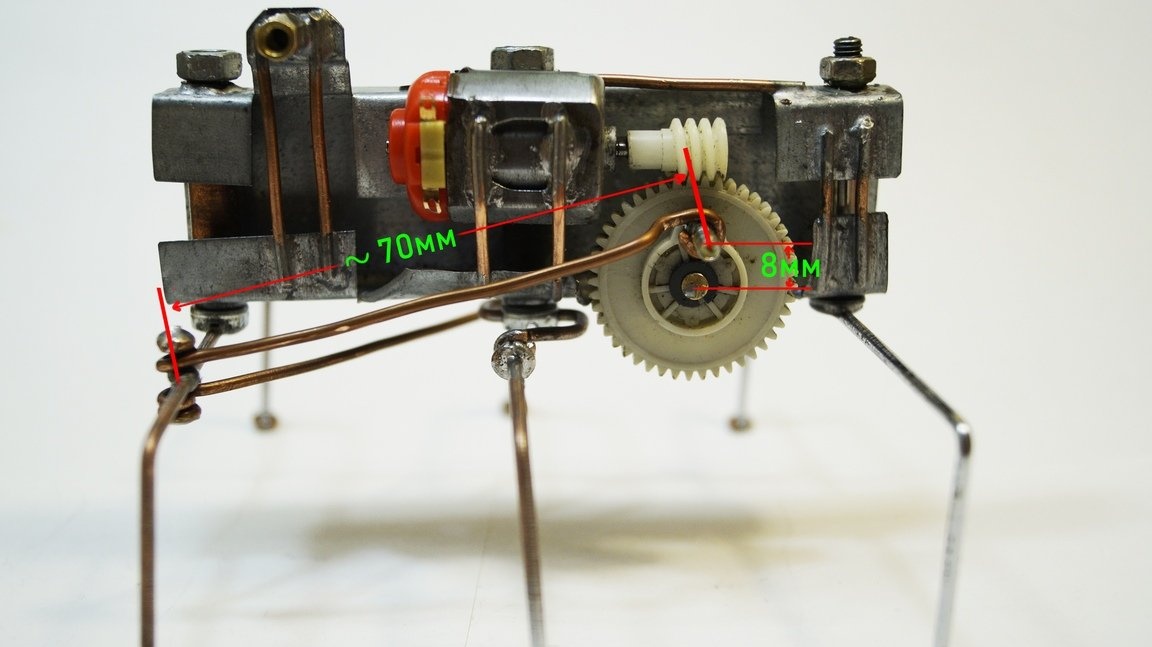
Sa isang larawan 1. Ang mekanikal na ipis ay ipinapakita, view ng gilid. Sa isang larawan 2. Ang tuktok na view ay ipinapakita.
Larawan 1.
Larawan 2.
DESIGN Bilang isang frame, ginamit ang profile ppn-2 30X20. Ang makina at iba pang mga kasukasuan ay na-mount sa pamamagitan ng paghihinang. Ang mga paws ng isang ipis ay pinahigpitan ng M6 bolts. Ang power button at baterya kompartimento ay nakadikit sa double-sided tape. Bilang isang traksyon para sa pagmamaneho ng mga binti ng ipis, ginamit ang isang tanso na cable na may isang seksyon na 2.5 mm.
Sasakyan AT CRANKS. Ang motor at ang pihak na axis ay ibinebenta sa frame sa POS-61, paghihinang acid ZnCl (Zinc klorido). Upang madagdagan ang metalikang kuwintas at mabawasan ang laki, ginamit ang isang worm gear.
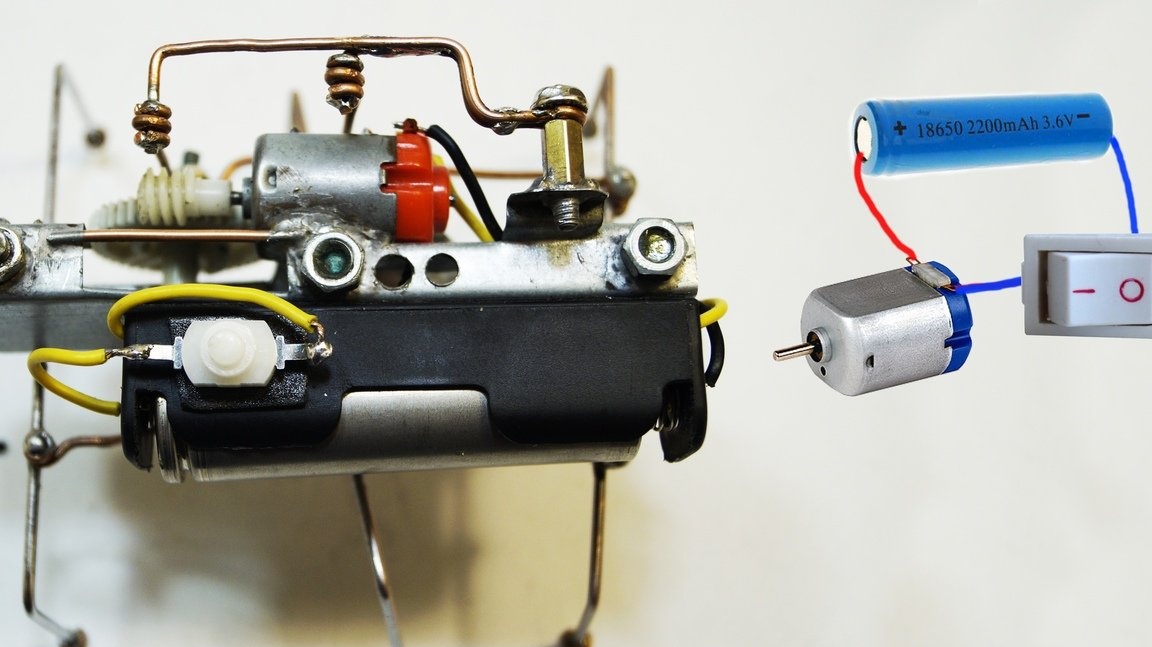
NUTRITION. Ang 18650 na baterya ay ginamit bilang lakas ng robot.Ang mapagkukunan ng kapangyarihan ay 3.7V.
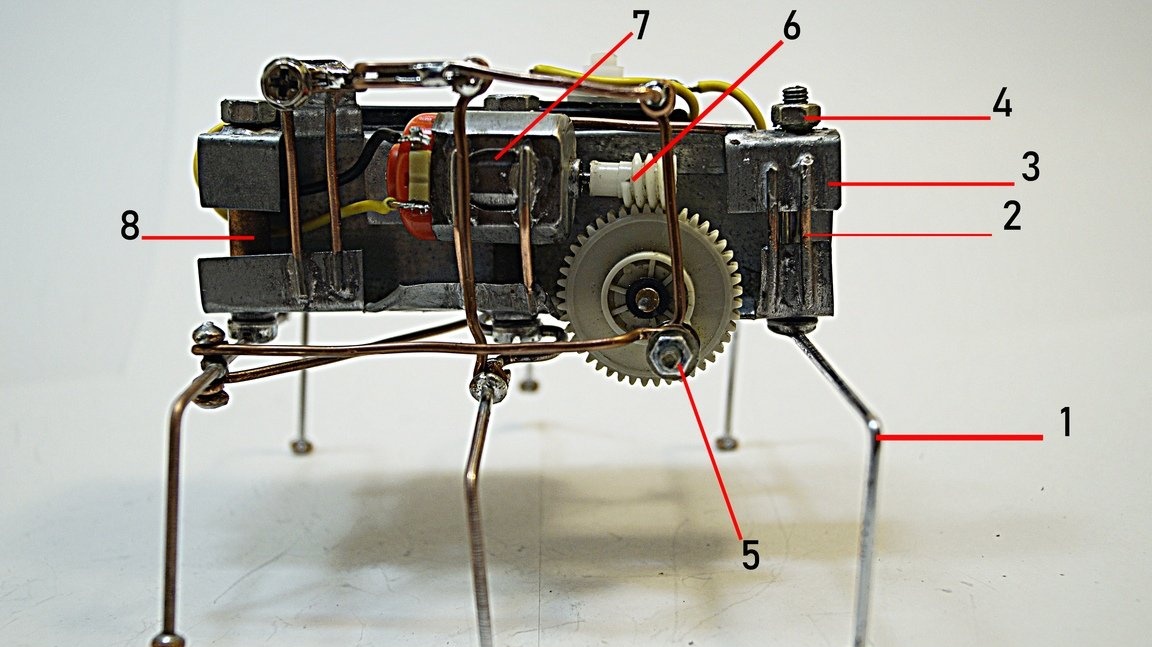
ROBOT DESIGN DETALYE
1. Paws ng ipis.
2. Ang stiffener.
3. Ang frame.
4. Ang axis ng mga paws ng ipis.
5. Mekanismo ng crank.
6. Pagmamaneho ng worm.
7. Elektrikal na motor F130 5 V.
8. Ang braso ng manggas ng ipis ng pawis.
9. Uri ng baterya 18650, 3.7 V.
10. Bahagi ng baterya.
11. Power button.
3. Ang prinsipyo ng trabaho.
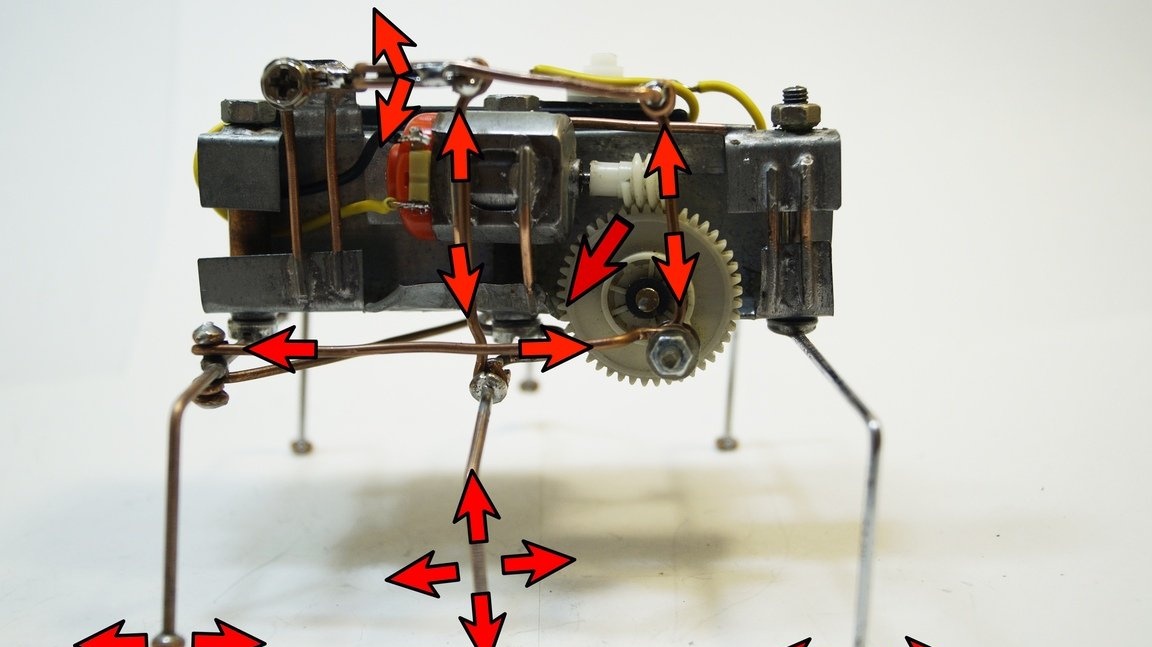
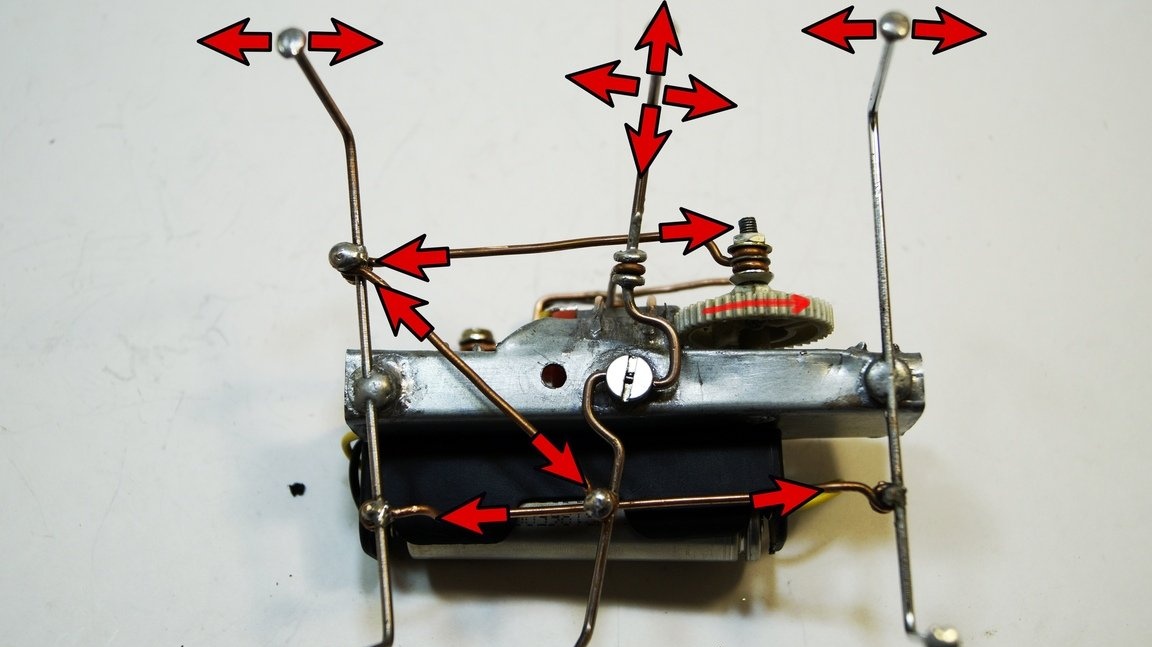
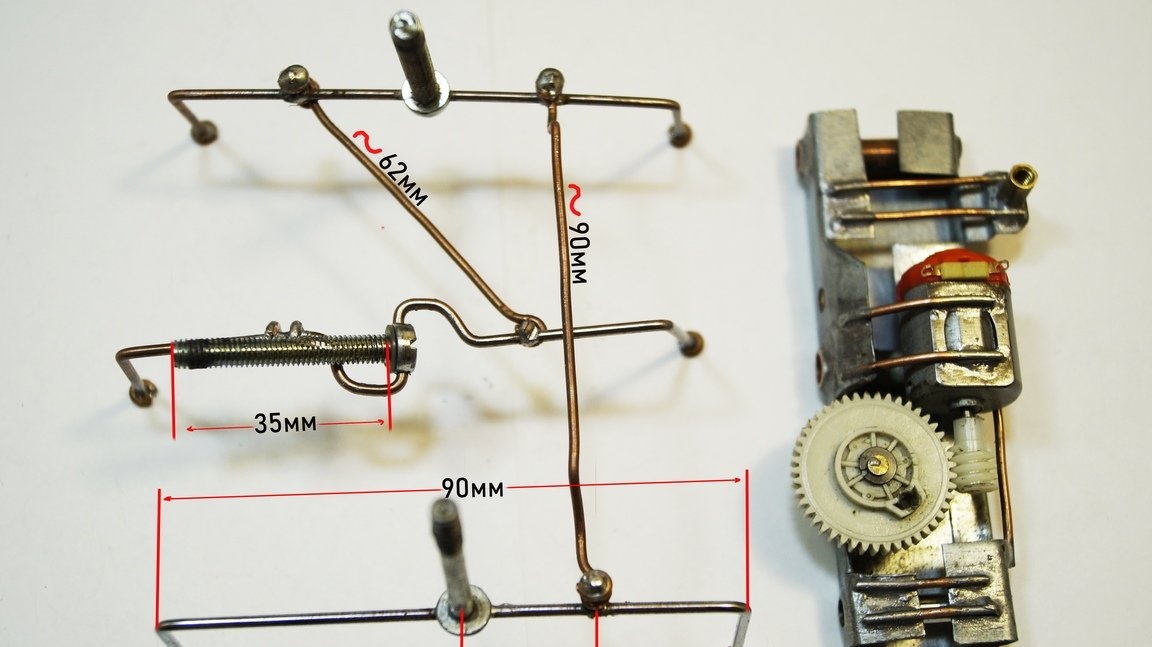
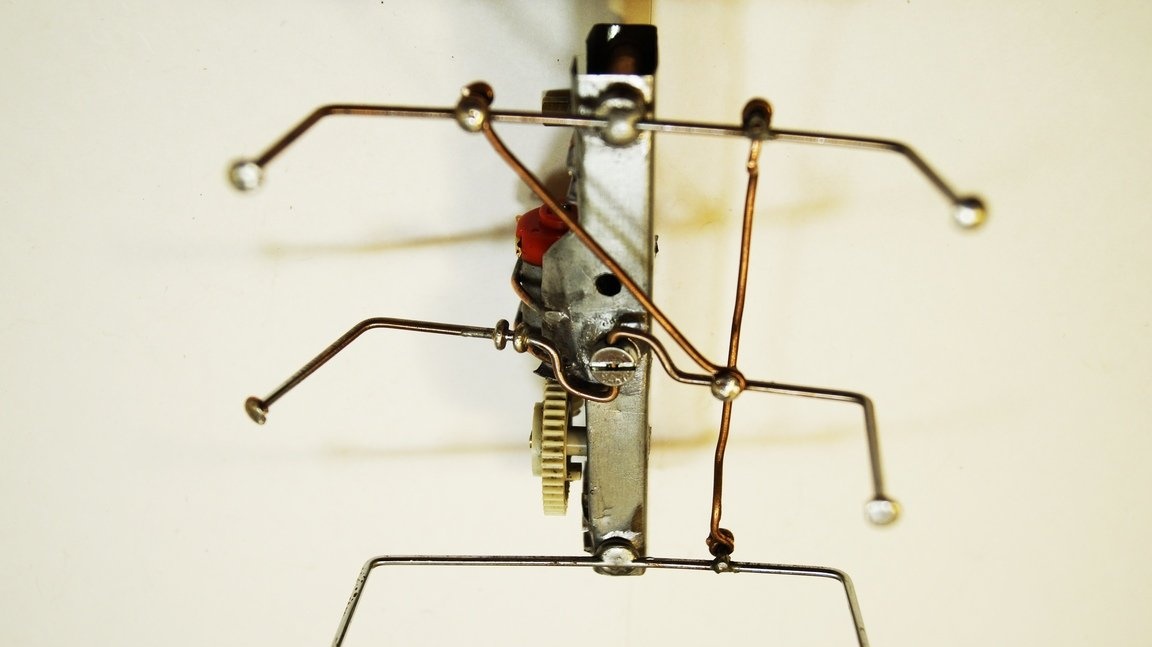
Sa isang larawan 3. 4. Ang prinsipyo ng gawain ng mga mekanikal na bahagi ng isang ipis ay ipinapakita. Ito ay nagkakahalaga ng pag-alala na ang harap at likuran na mga binti ng robot ay gumagalaw nang pahalang, at ang gitnang mga binti ay gumagalaw nang patayo at pahalang.
Ang kapangyarihan ay ibinibigay sa de-koryenteng motor sa pamamagitan ng susi, ang motor ay umiikot ang mekanismo ng pihitan. Ang crank ay humihimok sa unahan ng paa sa pamamagitan ng traksyon, ayon sa pagkakabanggit, mula sa unahan sa paa, ang thrust ay nagtutulak sa likod na paa (palipat lipat sila). Ang gitnang pares ng mga paws ay konektado sa unang pares, na tumawid (lumipat sila sa antiphase).
Upang ilipat ang gitnang pares ng mga paws nang patayo, isang pingga ay naka-mount sa itaas ng motor, na itinatakda sa paggalaw mula sa mekanismo ng pihitan.
Larawan.3
Larawan.4
4. Mga materyales at tool.
1.Soldering iron 50W.
2. Bahagi ng baterya.
3.Prysoy POS-61.
4. Isang tanso na wire na may isang seksyon na 2.5 mm.
5. Pagbebenta ng Acid ZnCl (Zinc Chloride)
6. Elektrikal na motor F130 5V.
7. Mga gunting para sa metal.
8. drive ng bagyo.
9. Pliers.
10. Steel tube, diameter 80mm.
11. Muling maibabalik na baterya 18650.
12.Profile PPN-2 30X20.
At din: (power button, double-sided tape, mounting wire)

5. Mga tagubilin sa pagpupulong.
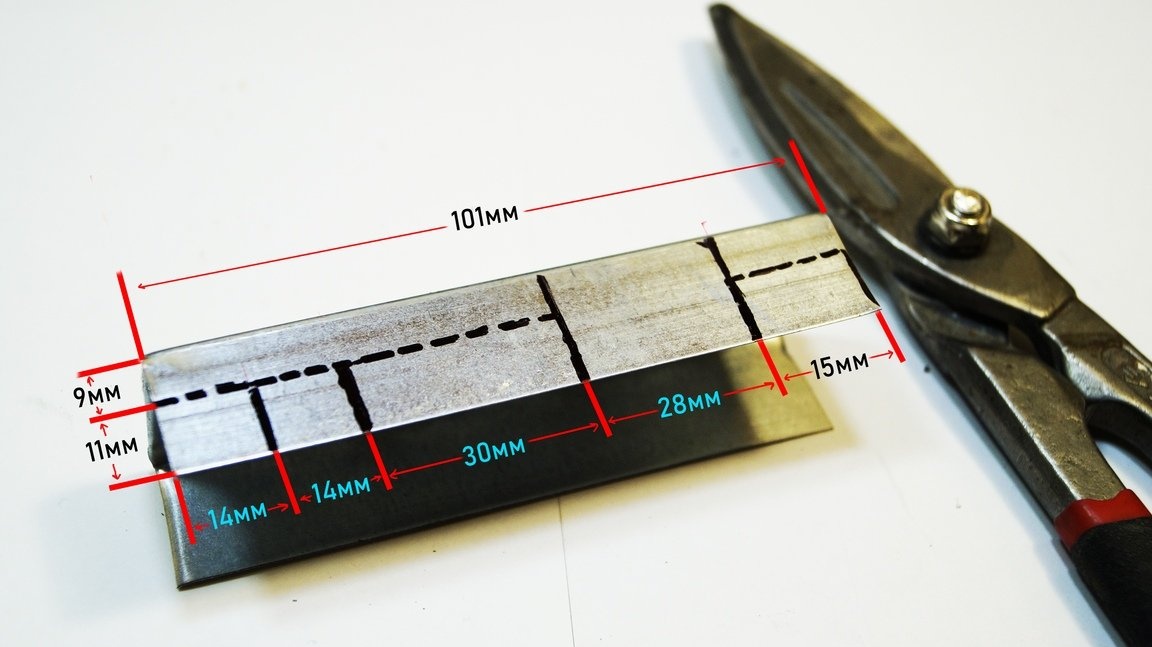
1. Paggawa ng isang frame ng ipis.
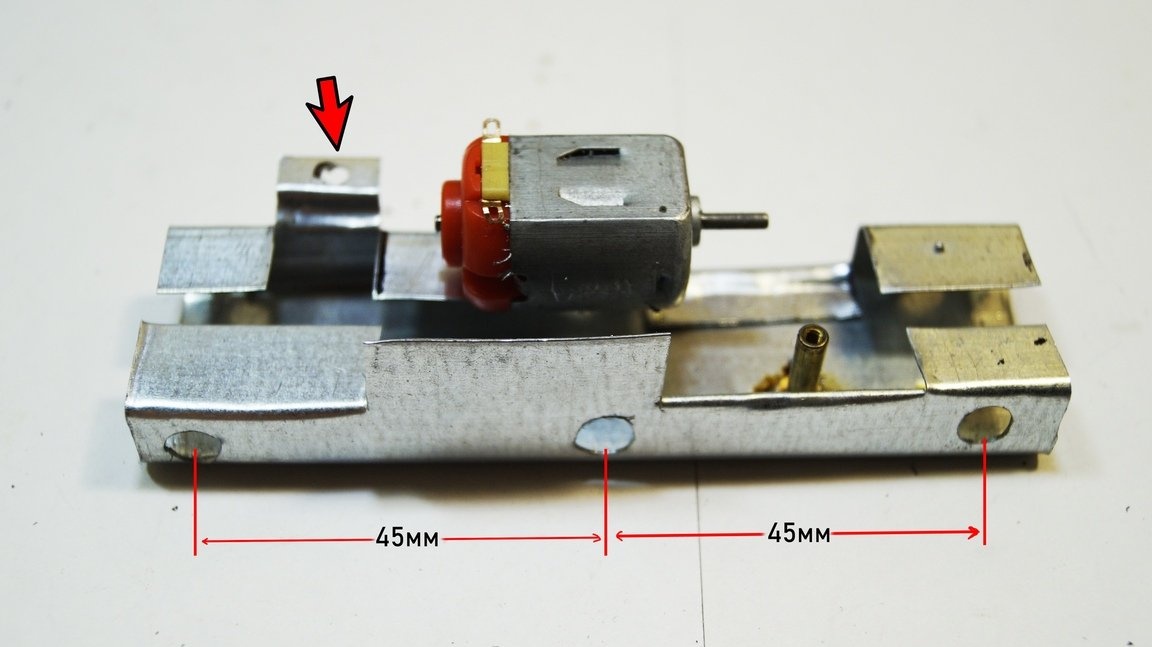
Iguhit ang markup sa profile tulad ng ipinahiwatig sa Larawan 5.
Larawan 5.
Gamit ang gunting para sa metal, pinutol namin at ibaluktot ang workpiece na may mga pliers tulad ng ipinapakita sa larawan 6. Markahan ang mas mababang bahagi tulad ng ipinahiwatig sa larawan 6. Bend ang profile na may mga plier tulad ng sa larawan 7.
Larawan 6.
Larawan 7.
2. Electric motor at pihitan axis.
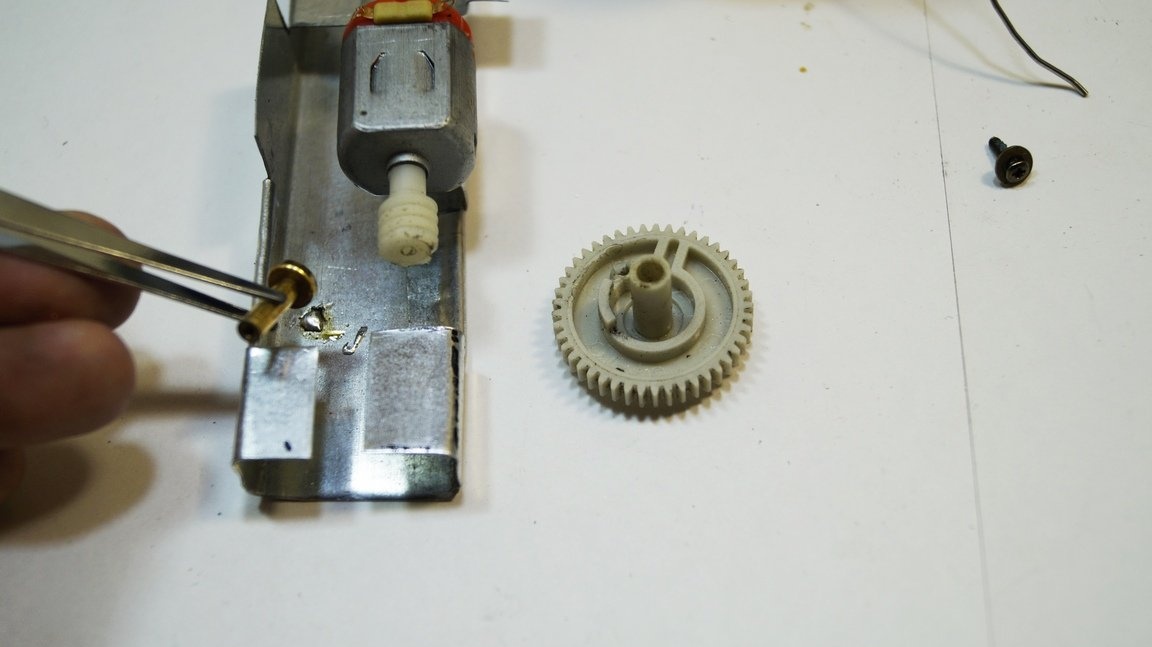
Ang susunod na hakbang ay ang panghinang ng de-koryenteng motor sa frame. Ang motor bago ang paghihinang ay kailangang ma-disassembled. Binabaha namin ang pabahay ng motor at ang frame na may isang paghihinang iron Larawan 8.
Ibinebenta namin ang katawan ng de-koryenteng motor at ang frame na magkasama, pinainit ang mga bahagi nang maayos sa isang paghihinang bakal, pagpindot sa mga ito sa bawat isa sa Larawan 9. !!! MAGING MABUTI, MGA DETALYE NG HEAT MUCH HEATED !!!
Larawan 9.
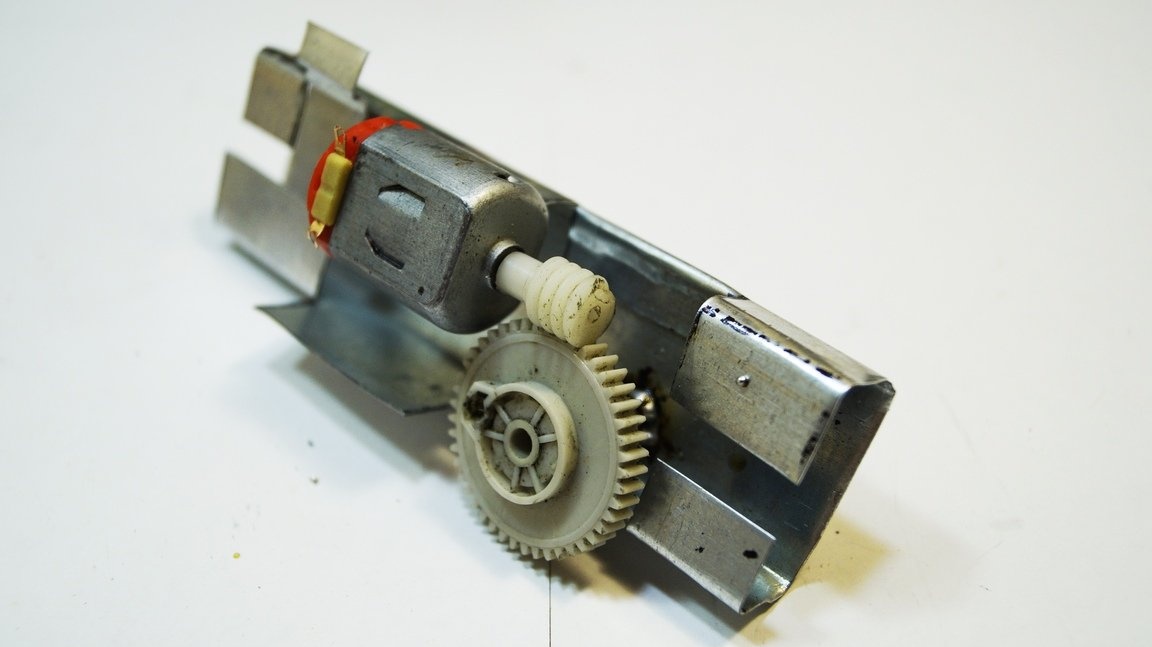
Pagbabalik sa electric motor. Ibinebenta namin ang crank axis sa lugar, ito ay tapos na sa eksperimento. Ang worm gear ay dapat na maayos na magkasama, ang mga gears ay hindi dapat lakad. Larawan 10.11.
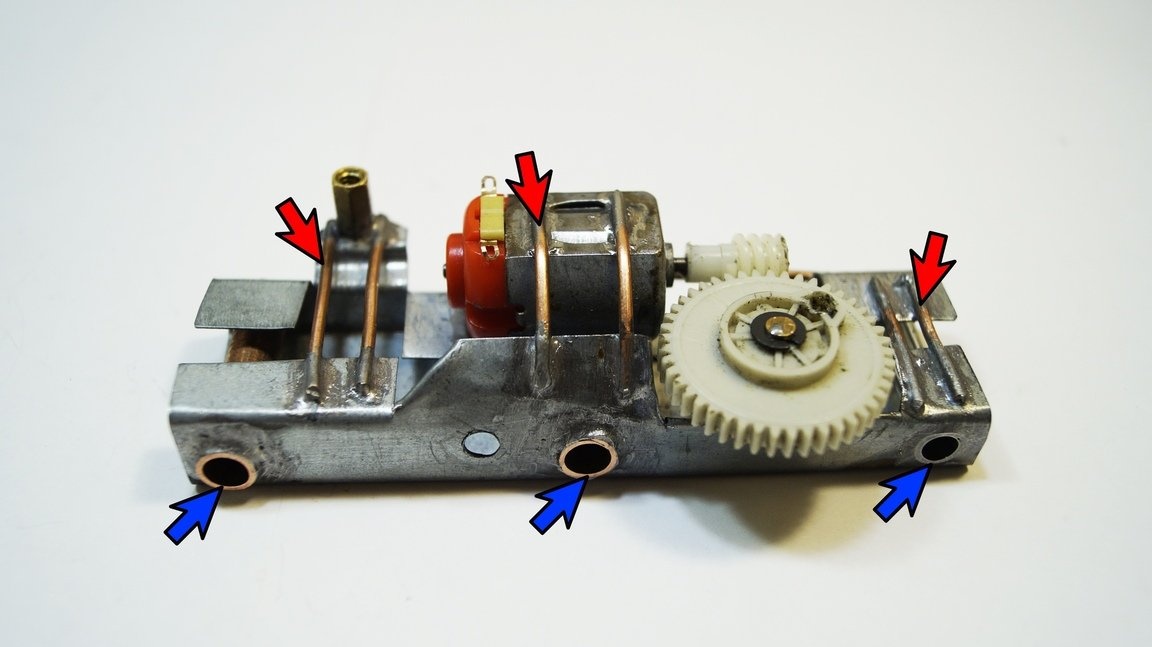
3. Mga butas para sa mga binti ng ipis.
Upang mailakip ang mga paws ng ipis sa frame, kailangan mong mag-drill ng mga butas na may 8mm drill. Nag-drill kami ng isang butas sa tainga sa likod ng de-koryenteng motor na may 3.2mm drill
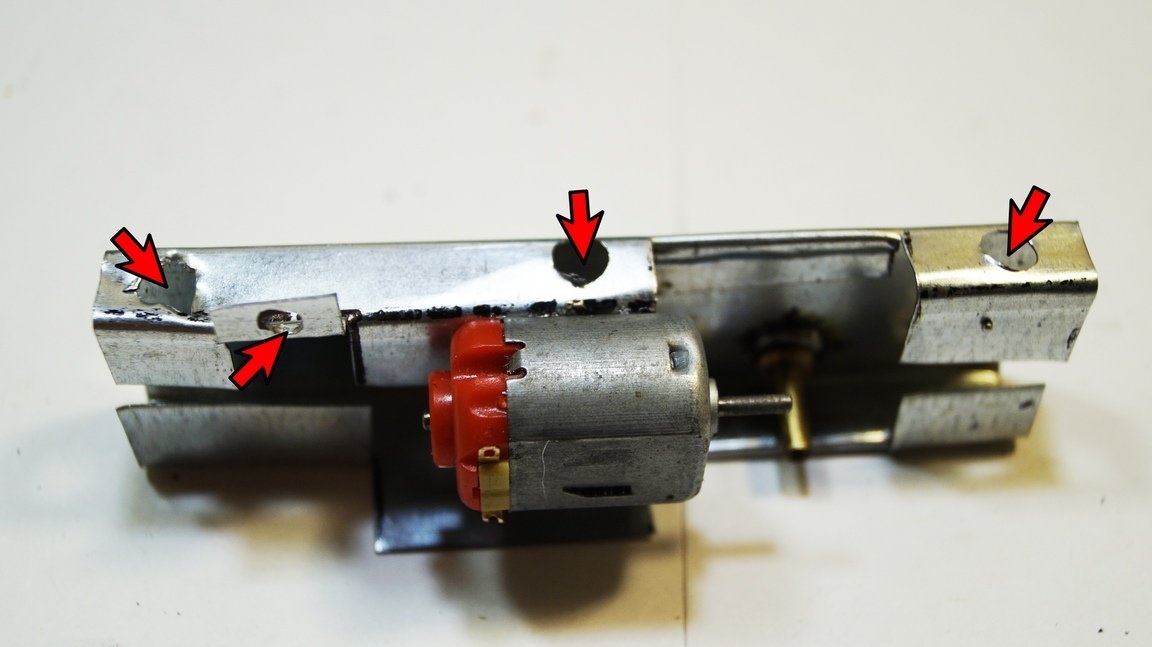
Nagbebenta din kami ng isang nut sa tainga sa likod ng de-koryenteng motor. Ang pingga na responsable para sa pag-angat ng gitnang paws kasama ang vertical axis ay idikit sa nut
Upang palakasin ang disenyo ng frame, ang mga stiffeners ay ibinebenta ng isang 2.5 mm na tanso na tanso.
Ang 8mm bushings ay naibenta rin sa mga punto ng attachment ng ipis ng paws Larawan 15.
4. Paws ng ipis.
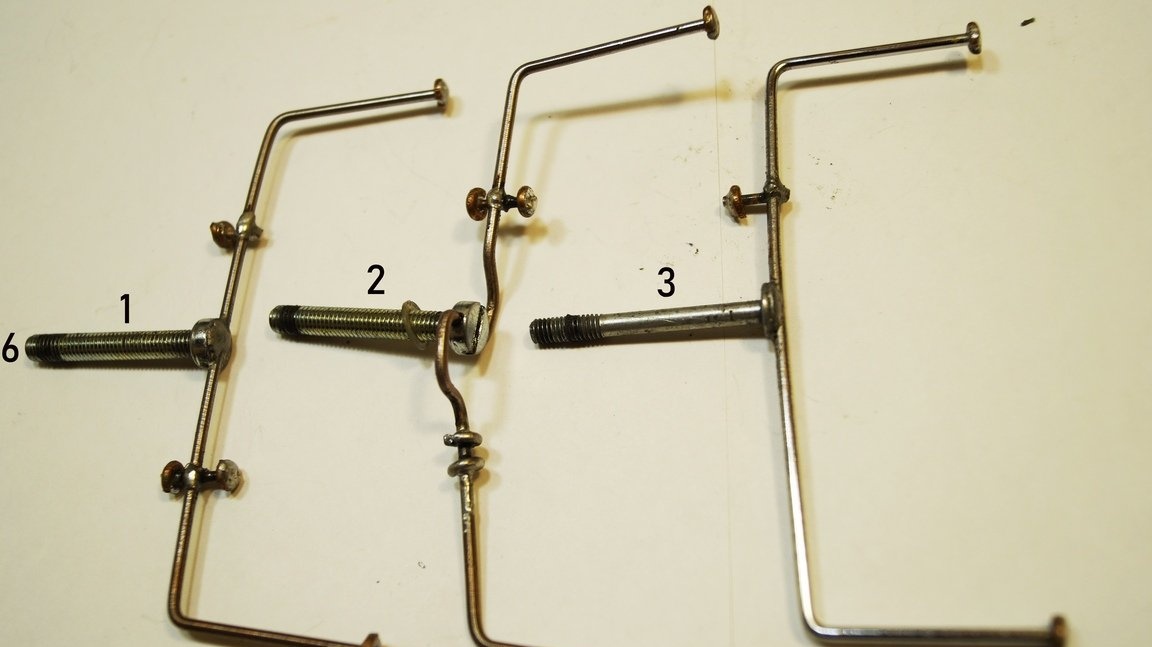
Ang isang metal wire na may diameter na 3 mm ay ginamit bilang mga ipis, ay ibinebenta ito sa ulo ng M6 bolt Photo 16. Ang gitnang pares ng ipis ay ginawa nang iba, isang butas ay drilled sa bolt head kasama ang diameter ng wire. Ang kawad ay baluktot sa anyo ng titik na "S", ito ay magpapahintulot sa mga binti ng ipis na gumalaw nang patayo.
Larawan 16.
Larawan 17.

Upang ayusin ang mga pamalo, isang tanso na wire na may isang 2.5 mm na haba na seksyon na 12 mm ang haba ay ibinebenta sa mga paws ng ipis, ang mga singsing na tanso ay ibinebenta sa mga dulo nito. Ang mga rod ay gawa sa tanso na wire na may isang cross section na 2.5 mm, ang mga sukat ay tinatayang, ipinapayo na yumuko ang kawad upang sa hinaharap mayroong posibilidad ng pagsasaayos sa kahabaan ng haba ng Larawan 18.
Ang larawan 19 ay nagpapakita ng isang ilalim na view, na may mga paws na naka-mount sa frame.
Itinatag namin ang traksyon mula sa mekanismo ng pihitan hanggang sa mga front binti ng ipis. Ginagawa namin ang isang thrust na may isang hem para sa kakayahang ayusin ito. Crank radius 8mm Larawan 20.
Gumagawa kami ng isang pingga para sa paglipat ng gitnang paws patayo mula sa tanso wire Larawan 21.22.
Natapos nito ang mekanikal na bahagi ng ipis.
Larawan 21.

Ipinapakita ng larawan 22 ang lokasyon ng mga paws sa mas mababang posisyon ng baras ng mekanismo ng pihitan.
Larawan 22.

5. Ang de-koryenteng bahagi.
I-paste ang kompartimento ng baterya sa isang double-sided tape sa frame ng ipis. Idikit ang pindutan ng kuryente sa kompartimento ng baterya. Ibinebenta namin ang lahat ng mga elemento ng Larawan 23.
Ang robot - ang ipis ay handa na !!!