







Ang pangunahing konsepto ng proyektong ito ay na sa tulong ng iba't ibang mga alon ng utak, ang gumagamit ay makokontrol ang robot, ang cursor sa kanyang PC o i-on / i-off ang mga ilaw sa kanyang bahay, habang ang microcontroller (Particle Photon) ay lumilikha ng isang online na pagsusuri ng mga alon ng utak ng gumagamit. Kaya oo, sa aparatong ito maaari mo talagang gamitin ang Power of Thought
 ... Ang aparato na ito ay hindi lamang inilaan para sa mga tamad o tagahanga, nilikha ito upang mabigyan ng pagkakataon ang mga tao. na nagpupumilit araw-araw sa kanilang kapansanan. Ang robotna binuo ng may-akda ay gumagana tulad ng isang sistema ng wheelchair bahay Ang automation ay makakatulong sa gumagamit upang makontrol ang ilaw o ang telebisyon, kahit na hindi siya makalipat. Ang mode ng PC controller ay maaaring maging kapaki-pakinabang kahit na sa mga ganap na malusog.
... Ang aparato na ito ay hindi lamang inilaan para sa mga tamad o tagahanga, nilikha ito upang mabigyan ng pagkakataon ang mga tao. na nagpupumilit araw-araw sa kanilang kapansanan. Ang robotna binuo ng may-akda ay gumagana tulad ng isang sistema ng wheelchair bahay Ang automation ay makakatulong sa gumagamit upang makontrol ang ilaw o ang telebisyon, kahit na hindi siya makalipat. Ang mode ng PC controller ay maaaring maging kapaki-pakinabang kahit na sa mga ganap na malusog. Paano ito gumagana?
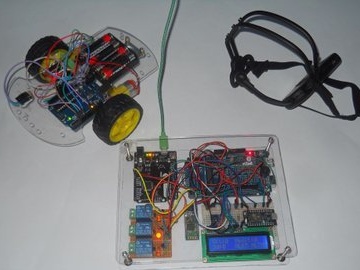

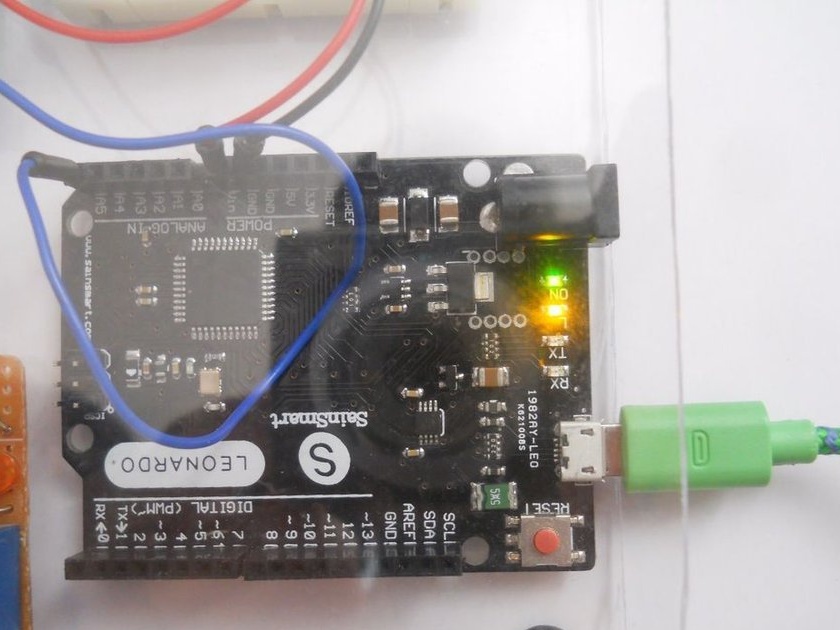
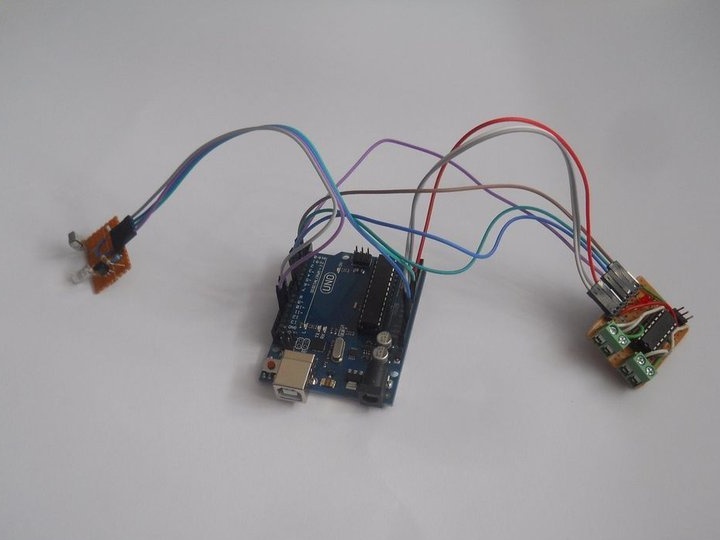
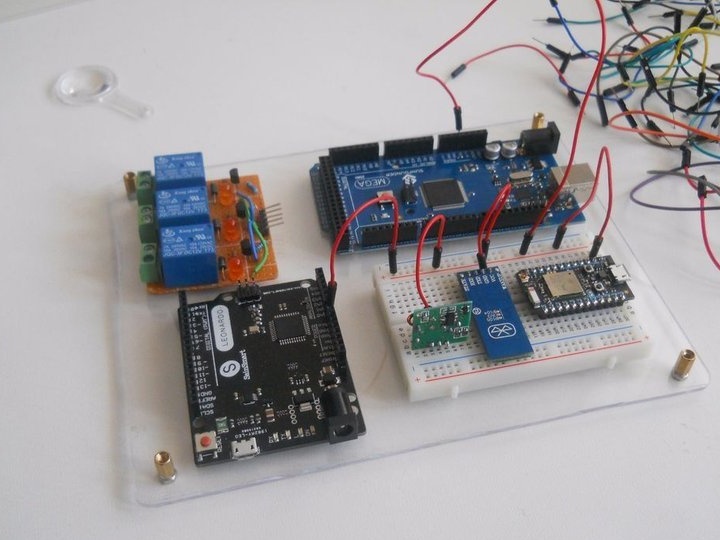
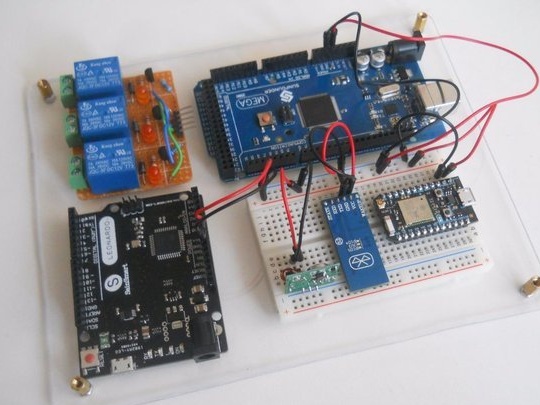
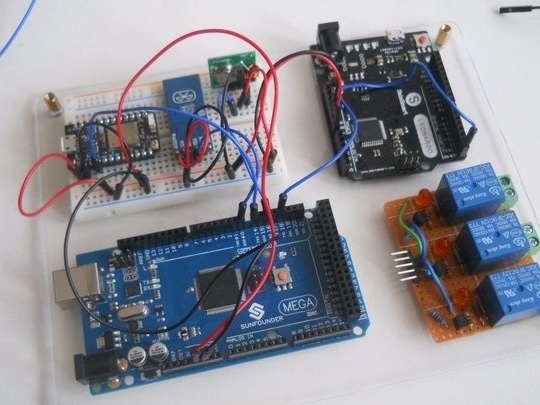
Apat na mga microcontroller ang ginamit upang buhayin ang proyektong ito: Arduino Mega, Arduino Leonardo, UNO at Particle Photon. Ang Mega ay utak ng proyekto, na tumatanggap ng mga senyas mula sa headset, sinusuri at nagpapadala ng mga utos sa iba pang mga aparato. Ipinapasa ang lahat ng data sa Particle Photon, na lumilikha ng isang web server. Kinokontrol ni Leonardo ang mouse sa isang PC, at si Uno ay ginagamit upang makatanggap ng IR (mga signal ng infrared) at kontrolin ang robot. Ang isang aparato ay may kakayahang kontrolin ang tatlong magkakaibang aparato (o higit pa kung nais mong i-program ang iba pa). Karagdagan, ang tatlong magkakaibang aparato ay tatawaging mga channel. Ang aparato ay lumipat sa pagitan ng mga channel na ito kung isasara mo ang iyong mga mata:
Isara ang iyong mga mata sa loob ng 1-2 segundo: lumipat sa pagpapaandar ng home automation
I-close ang iyong mga mata para sa 2-4 segundo: lumipat sa mode ng robot controller
Isara ang iyong mga mata sa loob ng 1-6 segundo: lumipat sa mode ng control ng mouse
Upang gawin ang pag-andar ng automation sa bahay, kung saan maaari mong ikonekta ang anumang bagay: isang TV, light bombilya, sockets, anumang nais mo, ginamit ang mga relay
Para sa pang-unawa ng mga alon ng utak - Necomimi, na maaaring ilipat ang iyong mga tainga depende sa iyong mga utak na alon (pansin, pagmumuni-muni). Sa loob ng isang maliit na maliit na tilad na nagbabasa ng mga alon ng utak, nag-filter ng ingay at nagbibigay ng napakagandang signal. Gumagana ito sa interface ng UART (Serial), kaya sa ilang pag-hack maaari naming gamitin ang Arduino upang mabasa ang mga alon ng utak.Ang papel ng headset na ito ay ang wireless na nagpapadala ng mga alon ng utak sa isang sentral na server.
Kung pamilyar ka nakaraang proyektopagkatapos ay maaari mong laktawan ang Necomimi disassembly at remodeling phase.
Bumaba upang makita kung paano i-disassemble at gumawa ng isang wireless Bluetooth headset na labas nito.
Home System ng Pag-aautomat ng Home
Kung lumipat ka sa mode ng automation sa bahay, dagdagan ang antas ng iyong pansin sa itaas ng 70 upang i-on ang unang relay, dagdagan ang antas ng pagmumuni-muni sa itaas ng 70 upang i-on ang iyong pangalawang relay, at dagdagan ang parehong mga halaga sa itaas ng 70 upang i-on ang iyong ikatlong relay. Ito ay isang maliit na mahirap, ngunit hindi imposible pagkatapos ng ilang pagsasanay ng pag-iisip. Kung ang relay ay naka-on na, gumamit ng parehong utos upang i-off ito (kung naka-on, maabot ang 70 upang i-off ito). Kapag handa na ang system, ang anumang aparato na may mataas na boltahe (ilaw, TV, computer, tagahanga, anumang bagay) ay maaaring konektado sa module ng relay.
Kontrol ng mouse
Ang cursor ay kinokontrol ng emosyon. Kung ang antas ng atensyon ay mas mababa sa 25, lumilipat ito sa kaliwa, kung sa pagitan ng 25 at 50 ay lumilipat ito sa kanan, kung sa pagitan ng 50 at 75 ay umakyat ito, at kung sa pagitan ng 75 at 100 ay bumaba ito. Maaari kang magpalabas ng isang pag-click sa pindutan ng mouse sa pamamagitan ng pagtaas ng antas ng pagmumuni-muni. Siyempre, kailangan mong sanayin para dito.
Kontrol ng robot
Ang robot ay may tatlong iba't ibang mga koponan lamang: huminto, lumiko pakaliwa at sumulong. Bakit dalawa lamang ang mga pagpipilian sa paggalaw? Dahil ang dalawang direksyon na ito ay sapat upang ilipat ang robot kahit saan. Gamitin ang iyong antas ng pagmumuni-muni upang paikutin sa robot, at kapag naabot mo ang direksyon na nais mong ilipat, itigil ang robot, pagkatapos ay sumulong sa antas ng pansin. Ito ang pinakamahusay na paraan upang makontrol ang robot, at kahit na ang mga nagsisimula na hindi makontrol ang kanilang mga pansin / mga halaga ng pagmumuni-muni nang maayos ay maaaring maglaro sa robot na ito.
Ang headset ay nagpapadala ng mga signal ng BT (Bluetooth) sa Arduino Mega, na pinag-aaralan ang mga papasok na byte at, depende sa mga saloobin ng gumagamit, ay kinokontrol ang iba't ibang mga pag-andar. Sa una, nais ng may-akda na gamitin ang Particle Photon bilang isang data transmiter, ngunit ang maliit na modyul na ito ay nakuha ng isang papel sa paglikha ng isang web server. Ito ang pinakamalaking pagbabago sa buong proyekto. Gumamit din siya ng mga module na Arduino na gawa sa bahay, ngunit maaari kang bumili ng mga online module na ito.
Ang lahat ng mga bahagi ay mula sa GearBest.com. Ito ay isang online na tindahan, katulad ng eBay, ngunit ang mga ekstrang bahagi ay naihatid nang mas mabilis (marahil ang lahat ng ito ay nasa aliexpress). Samakatuwid, kung nais mong lumikha ng iyong sariling manlalaban ng laro, robot controller o Force Detecto r, magsimula sa pamamagitan ng pagbili ng mga bahagi.






Kinakailangan ang mga tool:
paghihinang bakal
nagbebenta
glue gun
self-adhesive tape / double-sided tape
wire stripper
mga cutter ng kawad
Kagamitan
/ Arduino Nano
Software:
Pag-hack Necomimi







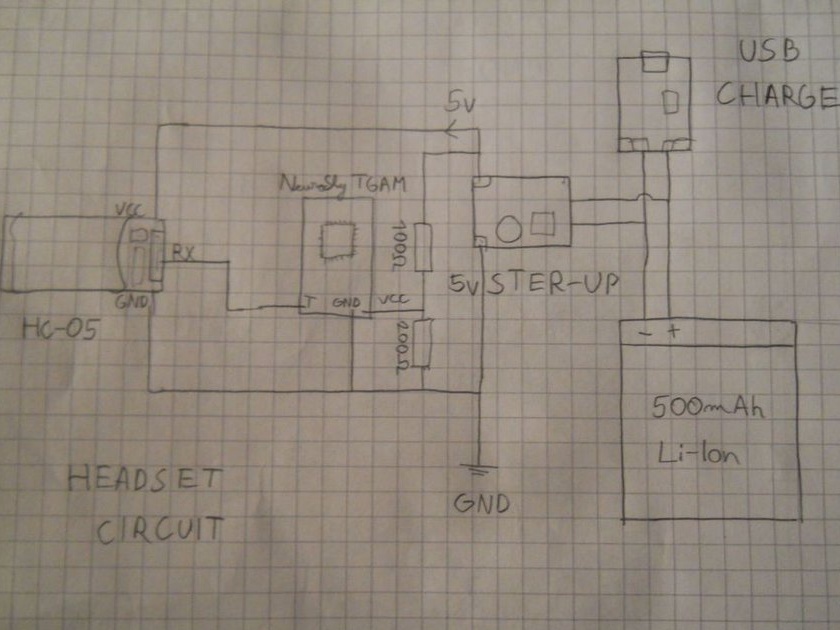
Nais naming baguhin ang laruang EEG na ito para sa paglipat ng data sa pamamagitan ng Bluetooth, kaya una namin i-disassemble ang kaso. Ang mga screw ay nasa ilalim ng sticker. Alisin ang sticker at likod ng aparato at makikita mo ang mga maliit na board sa loob. Ang isa sa ilalim ng pangunahing board ay ang Neurosky TGAM chip. 4 na mga wire mula sa pangunahing board ng microcontroller ay ibinebenta dito, kaya kumuha ng isang paghihinang iron at maingat na alisin ang circuit na ito. Ngayon ang nagbebenta ng tatlong wires sa GND pin, sa VCC pin, at sa T pin. Ang isang T-pin ay isang output ng transmiter na may bilis na 57600 baud, na nagpapadala ng mga packet ng data sa aming microcontroller. Kapag naibenta mo ang tatlong mga wire sa itaas, maaari kang magtayo sa iyong sariling mapagkukunan na muling magagamit. Ang may-akda ay gumagamit ng isang 500 mAh lithium-ion na baterya, isang USB charger circuit, isang 5 V boost circuit, at dalawang resistors (100 Ohms at 200 Ohms) upang magbigay ng isang hiwalay na 3.4 V power supply para sa chip at ang module ng Bluetooth. Sa larawan, ang diagram ng koneksyon.
Kung handa na ang circuit, i-configure ang module ng Bluetooth.
Sundin ang mga tagubilin at mga numero sa ibaba at lumikha ng iyong sariling wireless EEG headset.
Ang pinakamahalagang bahagi ay upang ikonekta ang "T" pin sa "RX" sa module ng Bluetooth.



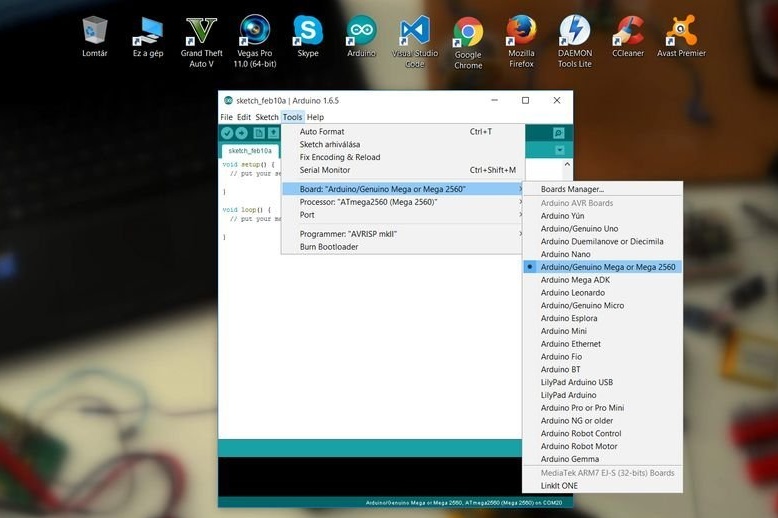
HC-06: Una mong mai-upload ang sketsa na pinangalanang "HC_06_Bluetooth" sa Arduino UNO, pagkatapos ay ikonekta ang module na Bluetooth tulad ng ipinapakita sa diagram.
// HC-06-Bluetooth
walang pag-setup () {
// Simulan ang serial serial.
Serial.begin (9600); // default na rate ng baud HC-06
pagkaantala (1000);
Serial.print ("AT");
pagkaantala (1000);
Serial.print ("AT + VERSION");
pagkaantala (1000);
Serial.print ("AT + PIN"); // upang matanggal ang password
pagkaantala (1000);
Serial.print ("AT + BAUD7"); // Itakda ang baudrate hanggang 576000 - hal. Necomimi dafault
pagkaantala (1000);
Serial.begin (57600); //
pagkaantala (1000);
}
walang bisa na loop () {
}Buksan ang Serial Monitor sa Arduino IDE at maghintay para sa Arduino na i-configure ang BT module. Ang iyong Bluetooth module ay nakatakda na ngayon sa 57600 baud. Maaari mong subukan ang maraming mga aplikasyon ng BCI (Brain Computer Interface) dahil ang na-hack na laruang Necomimi na ito ay magkatugma sa anumang mga aplikasyon ng Neurosky.
Maaari mong gamitin ang mga app na ito upang malaman kung paano makontrol ang iyong mga alon ng utak.
HC-05: Pagkatapos ay gamitin ang "HC_05_Bluetooth" at i-load ang iyong Arduino sa parehong paraan tulad ng dati.
// HC-06-Bluetooth
walang pag-setup () {
// Simulan ang serial serial.
Serial.begin (9600); // default na rate ng baud HC-05
pagkaantala (1000);
Serial.print ("AT");
pagkaantala (1000);
Serial.print ("AT + VERSION");
pagkaantala (1000);
Serial.println ("AT + ROLE = 1"); // itakda ang HC-05 upang master mode
pagkaantala (1000);
Serial.println ("AT + LINK =" Ipasok ang iyong address dito "); // ngayon dapat awtomatikong kumonekta ang module
pagkaantala (1000);
Serial.print ("AT + UART = 57600,1,0"); // Itakda ang baudrate sa 576000
Serial.begin (57600); //
pagkaantala (1000);
}
walang bisa na loop () {}
Ikonekta ang "EN" na pin ng HC-05 sa 3v3 Arduino. Dapat mong isulat ang address ng iyong HC-06 module sa code. Suriin ang address ng BT module sa iyong Android smartphone. Palitan ang ":" (dobleng tuldok) sa "," mga kuwit sa code.
At dapat mong baguhin ang address sa code: 20: 15: 09: 15: 17: 82 = 2015.09.151782 Kaya, ang HC-05 module ay maaaring makilala ang address.
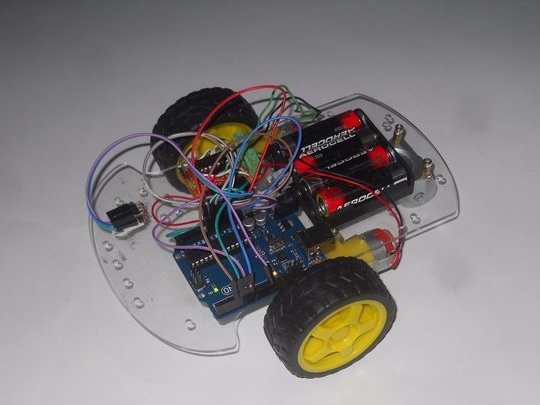
Remote control
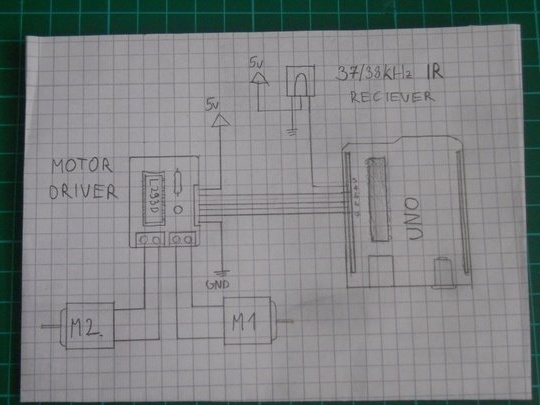
Upang makalikha ng murang robot na ito, isang 38 kHz infrared sensor ang ginamit, na ginagamit sa mga remote control sa telebisyon.
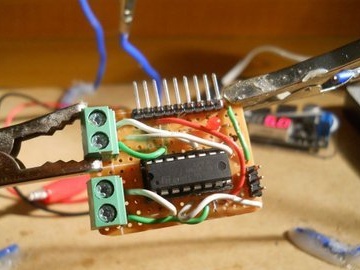
Engine driver
Diagram ng Engine Drive - Kakailanganin mo ang mga sumusunod na detalye:
2 Mga Terminal ng Screw
L293D IC3
Header Pin (90 degree)
1k risistor
Red LED
Mga wire
Lupon ng circuit
Gamit ang maraming mga wire ng tanso at, pagsunod sa diagram, ikinonekta ang mga pin ng microcircuit sa mga pin ng konektor. Hindi mahalaga kung aling mga paa ng microcircuit kung aling pin ng konektor, tandaan lamang kung saan mo ikinonekta ang mga ito. Ang LED ay konektado sa serye kasama ang risistor at kahanay sa 5 V VCC.
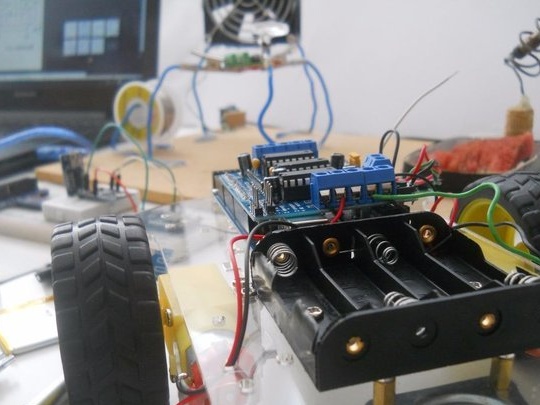
pagpupulong ng tsasis
Bilang isang driver ng motor na de koryente, ang L293D chip ay ginagamit, na maaaring makontrol ang dalawang motor. Tumingin sa diagram upang mabuo ang diagram.
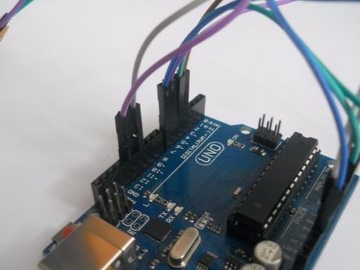
Ikonekta ang mga bahagi sa Arduino
Arduino Pin == & gt; driver ng motor
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
Kaya, tingnan ang circuit diagram ng L293D module, pagkatapos ay ikonekta ang mga contact nito sa Arduino UNO, tulad ng inilarawan sa itaas. Ang Pin 5v Arduino ay dapat na konektado sa pin 1, 9, 16 upang maisaaktibo ang pagpapaandar ng chip motor control. Pagkatapos ay gamitin ang mga terminal ng tornilyo upang i-on ang mga motor.
Ang aklatan ay gumagamit ng IRremote, isang code na nagbabasa ng 38 kHz na mga signal ng infrared, ay nag-decode ng mga ito, at pagkatapos ay gumagalaw ang robot. (I-download ang library sa seksyong "software").
Mayroong mga puna sa code, ngunit ang ilalim na linya ay na tinatanggal nito ang mga signal ng IR na nagmumula sa pangunahing server, kung gayon, depende sa nais ng gumagamit, lumiliko ito sa mga makina, pagkatapos kung saan lumipat ang robot o lumiko pakaliwa. I-download ang code: "Robot_Code". I-download ito sa iyong Arduino at magiging handa ang iyong robot.
Pangunahing server (Arduino Mega, Leonardo, Photon)




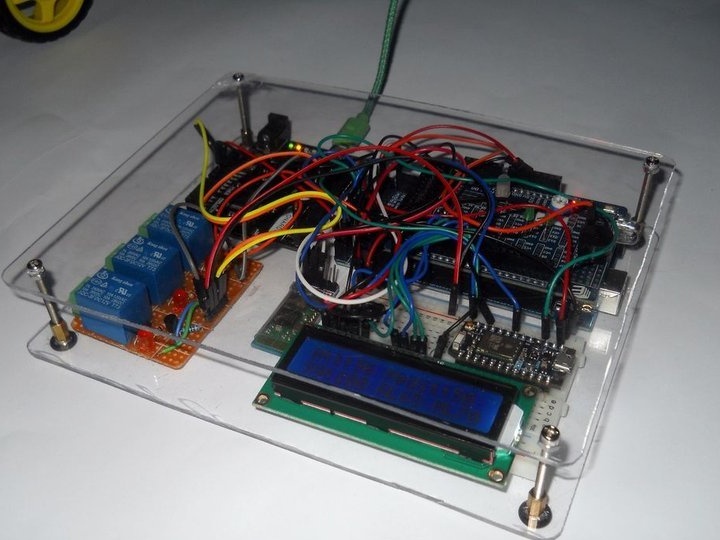
Nagbabasa ang server ng mga papasok na packet ng data mula sa wireless headset. Gagamitin namin ang naayos na module na BT upang magbigay ng komunikasyon sa pagitan ng headset at server. Ang Arduino Mega ay ang utak ng buong circuit, ang lahat ay konektado sa microcontroller na ito: Bluetooth, infrared transmitter LED, web server at mouse controller. Ang code ay medyo kumplikado, ngunit bilang isang patakaran, mayroon itong mga puna upang maunawaan.
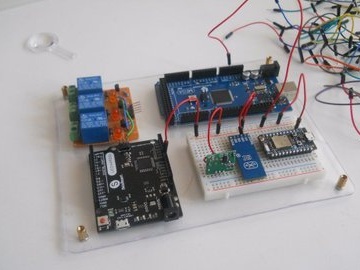
Pabahay
Ang lahat ay simple. Dalawang 18x15 cm plexiglass plate, pakinisin ang mga gilid na may papel de liha. Maraming mga turnilyo upang ikonekta ang mga ito sa bawat isa.
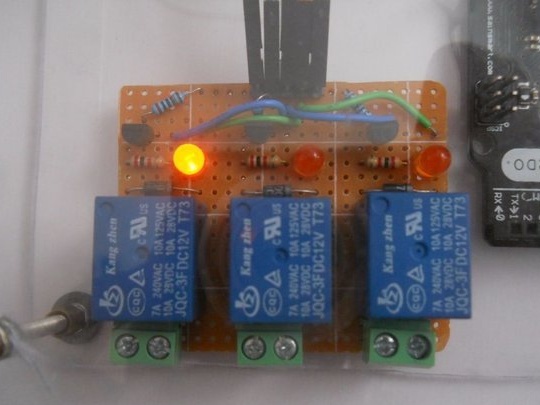
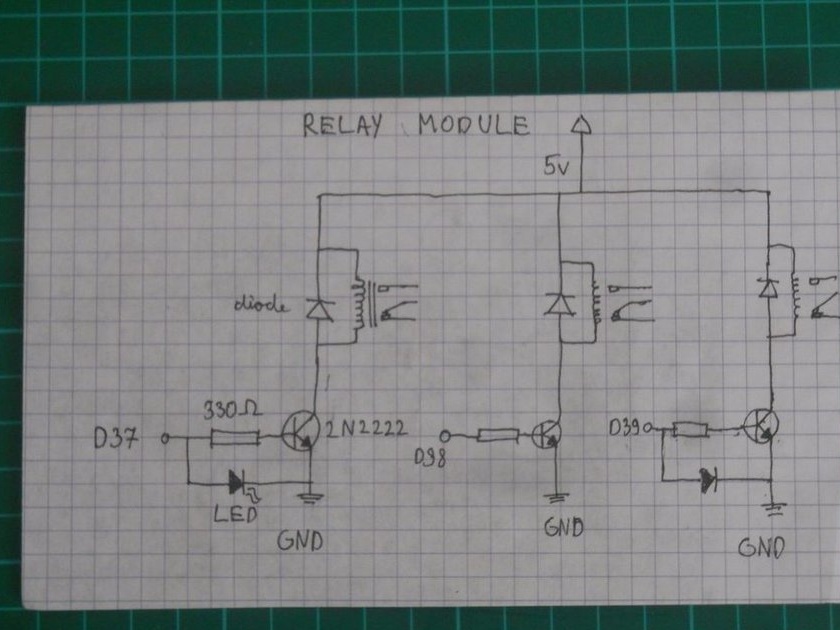
Relay board
Kakailanganin mo ang mga sumusunod na detalye:
2n2222 transistor (3 mga PC)
germanium diode (3 mga PC)
330 ohm resistors (3 mga PC.)
1 kOhm resistors (3 mga PC.)
Relay 5 V (3 mga PC.)
mga konektor ng pin
Lupon ng circuit
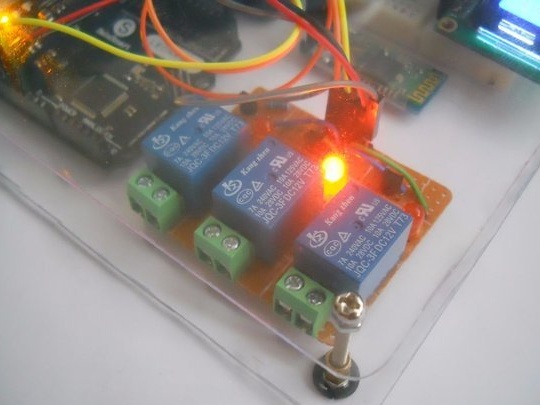
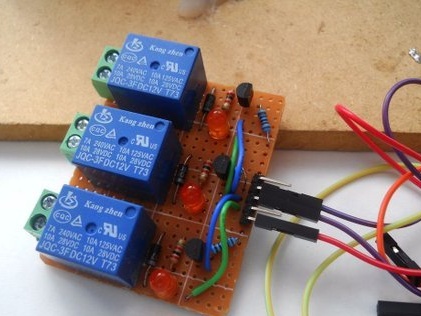
Ang isang imahe ay nagkakahalaga ng higit sa isang libong mga salita, kaya tingnan ang diagram kung paano ikonekta ang mga bahagi sa isang nakalimbag na circuit board.
Kung ang output ng "Signal" ay mula sa isang Arduino, isasara ang relay. Ang transistor ay nagpapalaki ng signal upang magbigay ng sapat na lakas para sa relay. Gumagamit kami ng mga contact na 37-38-39 upang makontrol ang mga HIGH LOW na antas ng bawat relay.
Upang mai-install ang mga bahagi sa isang kaso ng plexiglass, ginamit ng may-akda ang dobleng panig na tape. Medyo hawak niya ang mga detalye.
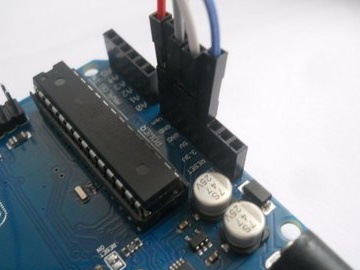
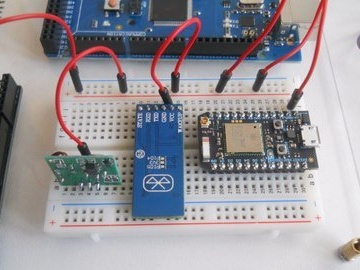
Ito ay isang server ng software, kaya ang paggawa ng isang circuit ay hindi napakahirap. Kailangan mo lamang i-on ang mga microcontroller at magtatag ng isang koneksyon sa pagitan nila. Ang IR LED ay konektado sa pin D3, at ang relay ay konektado sa 37-38-39. Ang D16 Arduino Mega ay pumupunta sa RX Photon at ang D18 sa RX Leonardo.
Koneksyon sa robot
[2.02 Kb] (mga pag-download: 14)
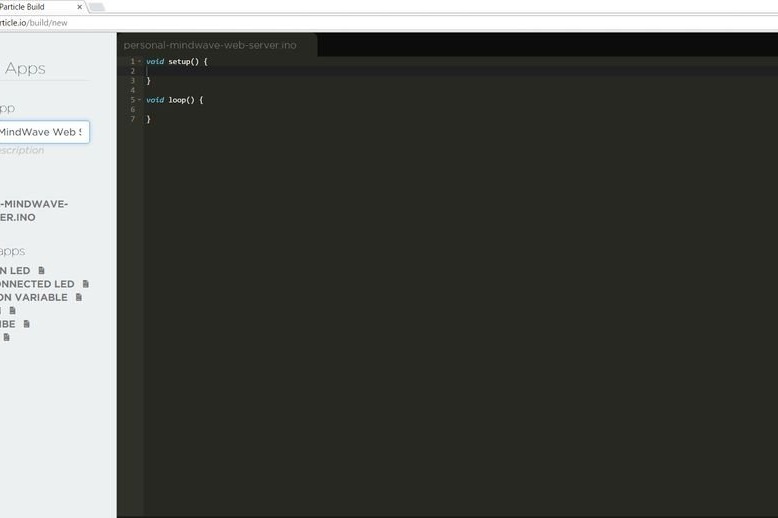
Ngunit ngayon handa na ang code at gumagana, kaya kailangan mo lamang i-download ang iyong mga microcontroller. I-download ang .ino file o kopyahin / i-paste ang code sa iyong IDE at gamitin ito. Ang code para sa Particle Photon ay dapat ma-download sa pamamagitan ng browser IDE. Upang gawin ito, magparehistro sa. At ikonekta ang iyong laptop sa iyong microcontroller. Lahat ay nangyayari nang halos awtomatiko, idagdag lamang ang iyong ID ng aparato.
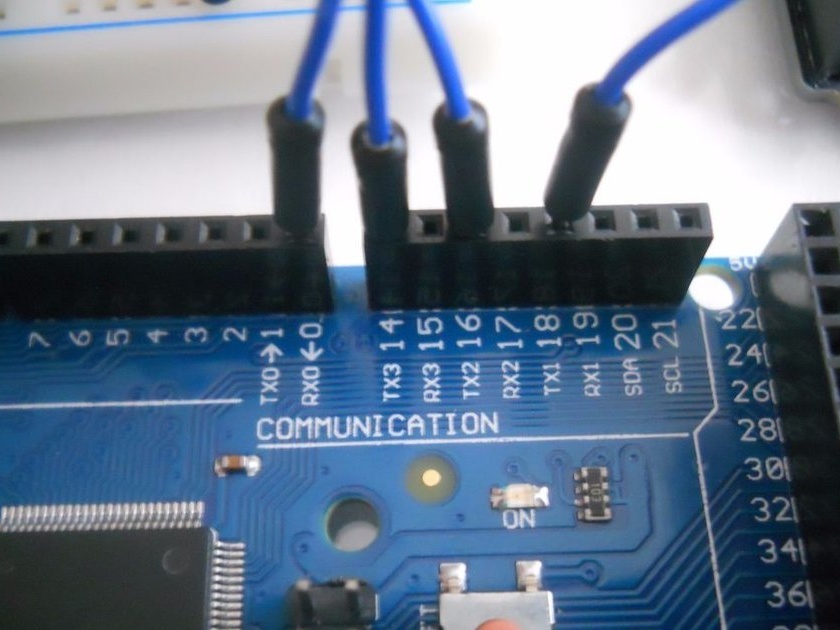
Bago i-download ang mga code, siguraduhin na walang konektado sa mga RX / TX pin. Kaya idiskonekta ang iyong module ng Bluetooth mula sa Mega, at idiskonekta ang Mega mula sa Leonardo at Photon.
[489 b] (mga pag-download: 15)

Web serverUpang magdagdag ng IoT (Internet of Things) function sa kanyang proyekto, gumawa ang may-akda ng isang online data logger gamit ang Particle Photon. Depende sa ginagawa mo sa aparato, lumilikha si Photon ng isang personal na server at nagsusulat ng data sa ulap.Ito ay maaaring mukhang nakakatakot sa una, ngunit isipin na maaari mong matukoy kung ikaw ay nai-stress (Tumataas ang mga antas ng atensyon at bumaba nang mabilis) o sulit na matulog
(antas ng pagmumuni-muni ay palaging nasa itaas ng 80)
. Ang web server na ito ay makakatulong sa iyo na mabuhay nang mas malusog.
Pag-encode ng Browser
Ang particle ay mayroon ding isang online panel kung saan maaari mong mai-publish ang anumang data gamit ang "Particle.publish ();" syntax. Ang mga tagagawa ng toolbar ay naka-save ng maraming oras para sa mga gumagamit.
