


Sa artikulong ito, ipapakita sa amin ng Wizard kung paano niya ginawa ang kumilos na Lego 60193 Arctic Air Transport helicopter ang modelo quadrocopter. Ang pangunahing gawain sa paggawa ng quadrocopter, bilang karagdagan sa mga katangian ng paglipad, ay upang makatipid ng maraming mga orihinal na bahagi hangga't maaari.
Tingnan natin ang isang maikling video na nagpapakita ng pagpapatakbo ng quadrocopter.
Kaya, para sa paggawa ng tulad ng isang quadrocopter, ginamit ng master ang sumusunod
Mga tool at materyales:
-LEGO City Arctic Helicopter - 60193:
- Controller at ESC 20x20 mm, halimbawa, HGLRC XJB F428 Micro F4 AIO OSD;
- Mga walang motor na motor - 4 na mga PC;
Mga Propeller
-Baterya 950 mAh;
-Connectors;
-Wire;
-Radio module (transmitter at receiver);
-Fastener;
-Knife;
-Soldering iron;
-Glue gun;
- distornilyador;
-Drill;
Hakbang Isang: Lego Bumuo
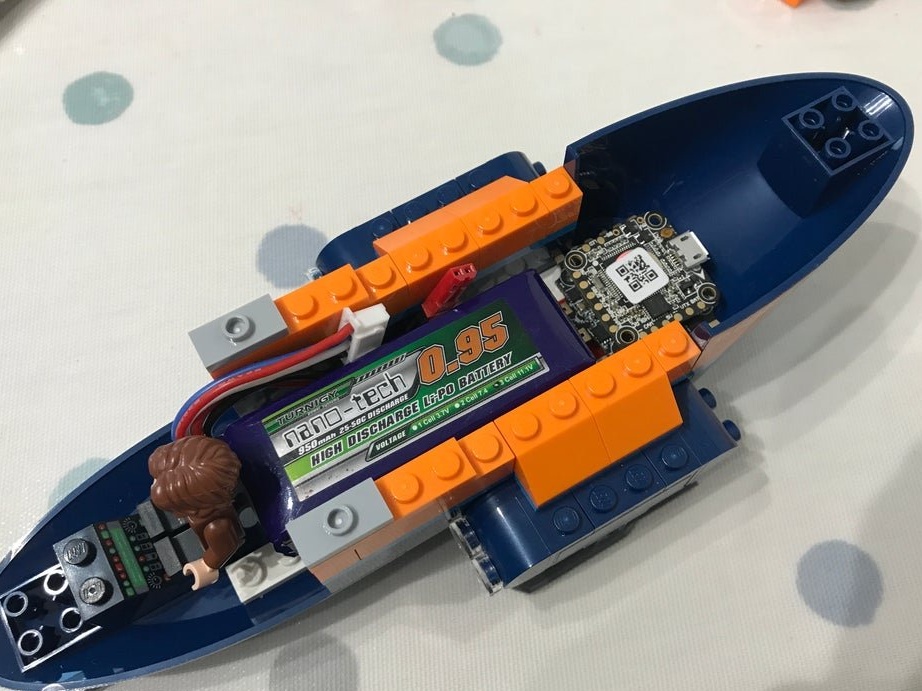
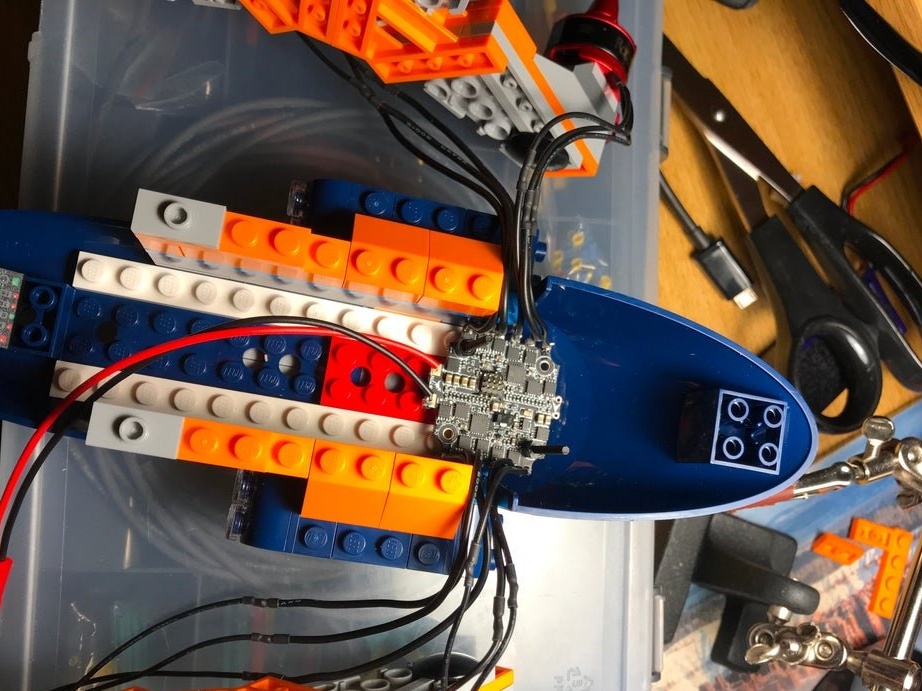
Una, kinokolekta ng panginoon ang LEGO-Arctic. Pagkatapos ang modelo ay bahagyang disassembled. Sa loob, kailangan mong ilagay ang baterya at controller, na pinagmamasdan ang pagbabalanse ng modelo.


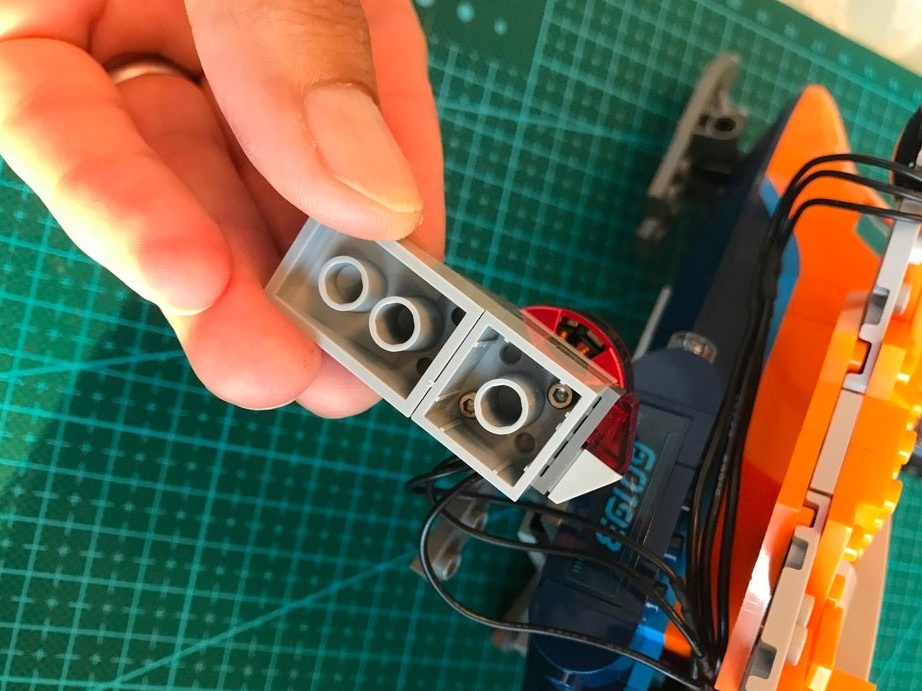
Hakbang Dalawang: Engine Mount
Ang mga mounting hole para sa standard na 1806 na walang brush na motor ay halos kapareho ng mga stud sa karaniwang LEGO 2x2 plate. Ang bawat "engine" na naka-mount sa isang quadrocopter ay may 2x2 madilim na kulay-abo na tile (LEGO 3022) at isang 2x2 light grey tile na may patayong pin (LEGO 2460), na kung saan ay karaniwang gaganapin sa mga hub ng isang LEGO propeller.
Ginagawa ng master ang mga mounting hole. Sa mga motor, sa gitna mayroong isang mababang pagtaas ng tubig. Ang isang butas sa ilalim nito ay drilled sa gitna ng tile. Secure engine.








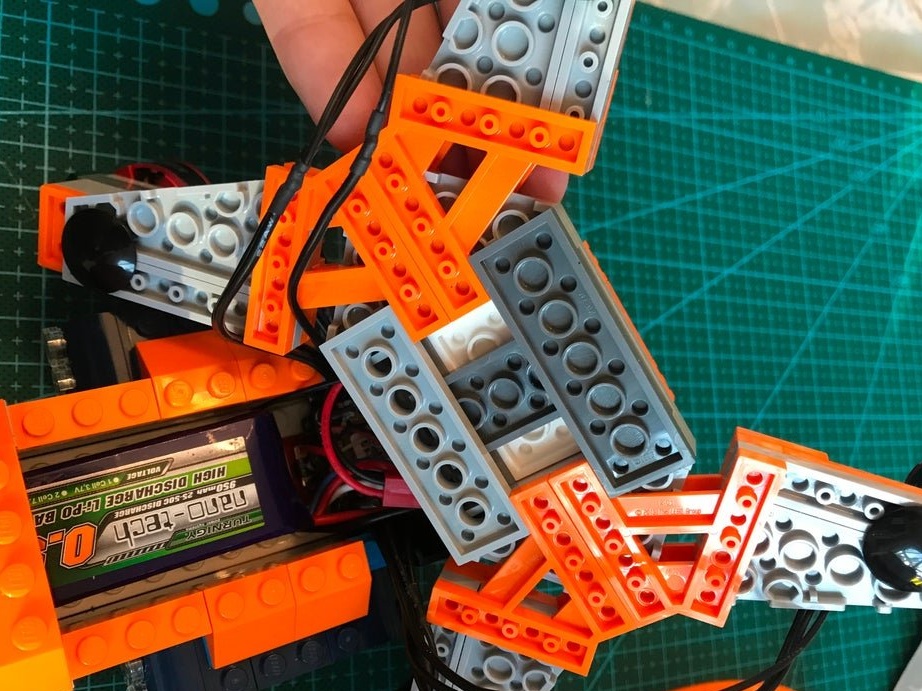
Hakbang Tatlong: Mga balikat
Ang muling pagsasaayos ng "balikat" ng quadrocopter, maaari mong bahagyang baguhin ang layout upang magbigay ng isang mas malawak o mas makitid na pag-aayos ng mga engine at lokasyon ng mga tornilyo na may kaugnayan sa bawat isa.
Ang karaniwang pagpupulong ng LEGO (unang larawan) ay may "balikat" at ang mga makina na matatagpuan malawak (pahalang) na may isang malaking overlap na overlay. Inihahatid ng master ang "balikat" at itinapon ang makina at, nang naaayon, ang mga turnilyo.



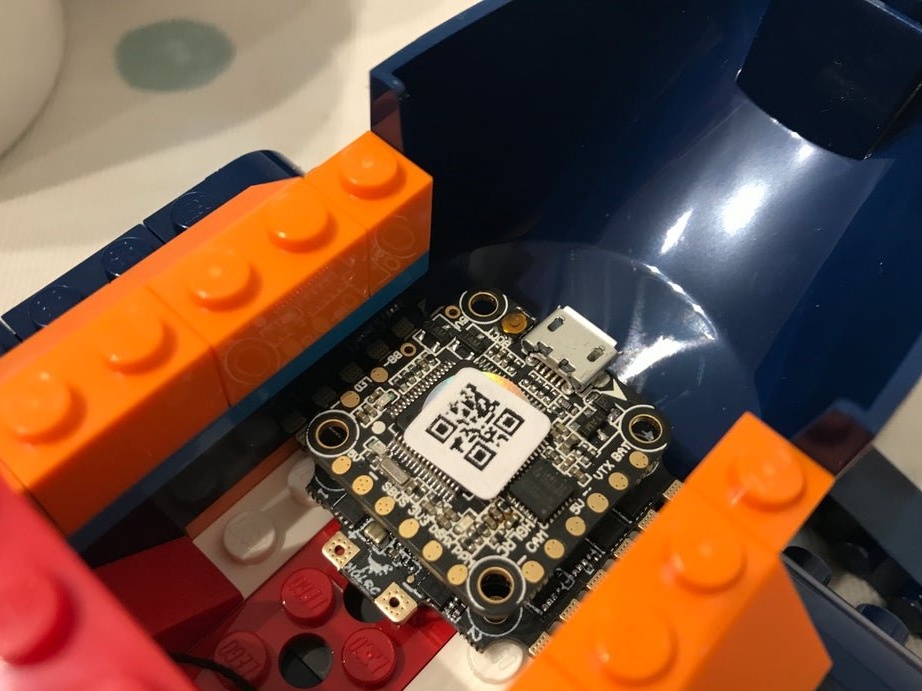
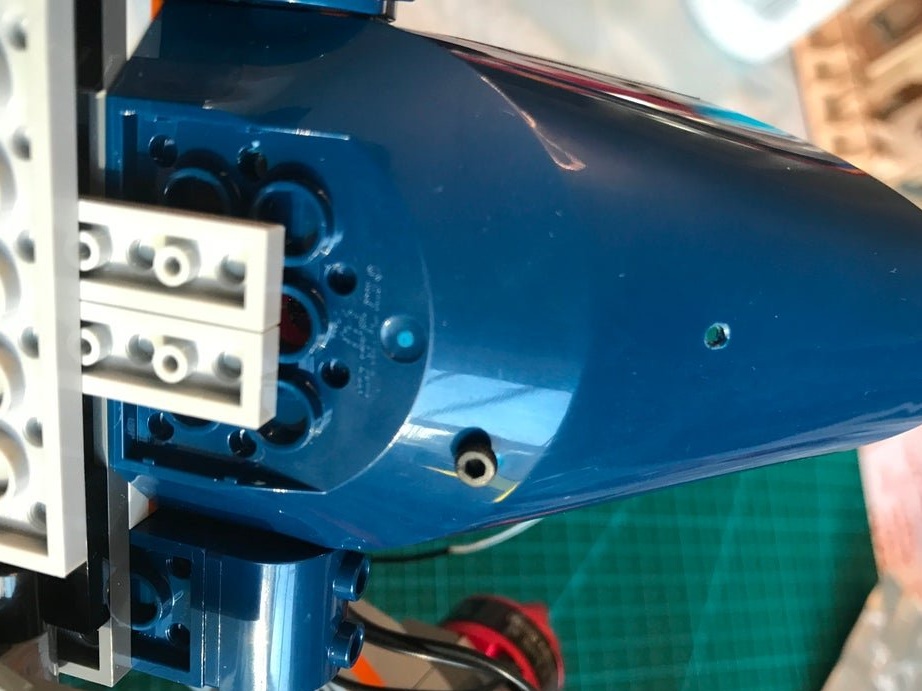
Hakbang Apat: elektronika
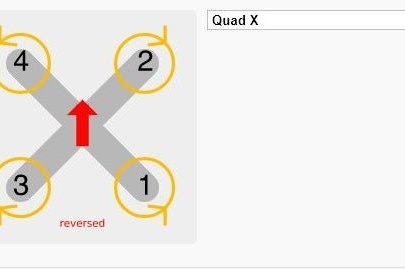
Ayon sa scheme, nag-install ito ng mga electronics. Ang unang larawan ay nagpapakita ng isang diagram ng direksyon ng pag-ikot ng mga engine. Ang direksyon ng pag-ikot ay maaari ring mabago sa yugto ng programming.
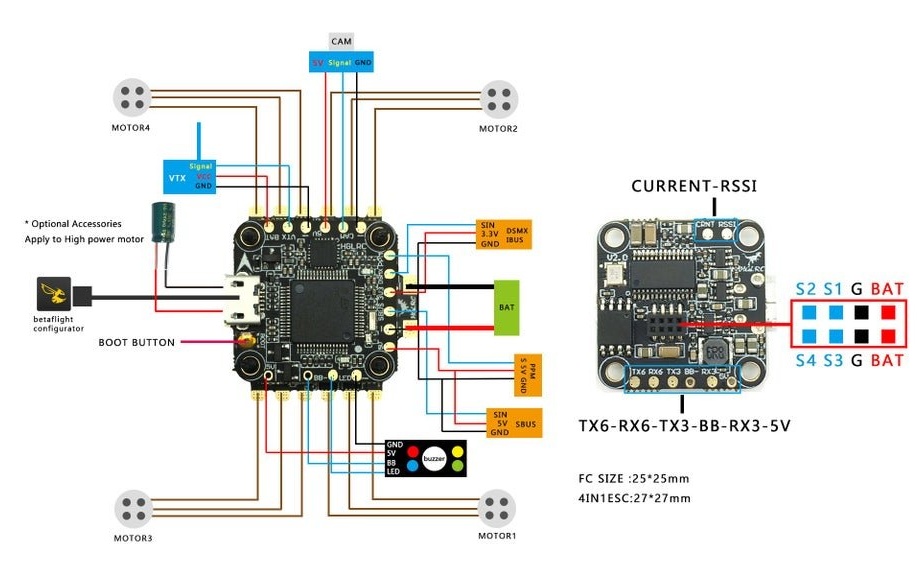

Matapos makumpleto ang pag-install, at bago kumonekta ang baterya, sinusuri ng wizard ang mga koneksyon upang maiwasan ang pagkasira o maikling circuit.
Kapag binuksan mo ang lakas, dapat mong makita ang mga ilaw sa flight controller at ilang mga beep mula sa ESC.
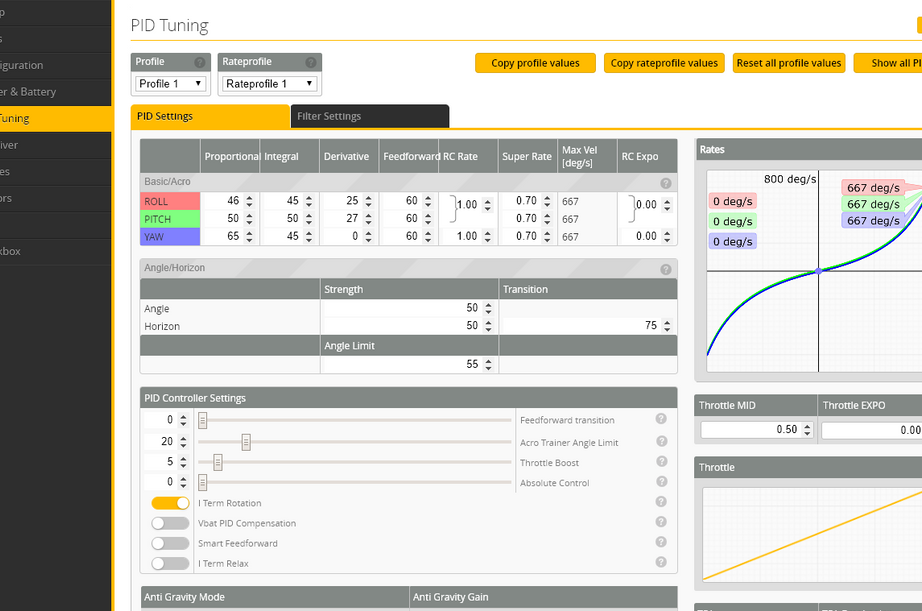
Hakbang Limang: Pag-setup
Ngayon na ang lahat ay konektado, oras na upang i-configure ang controller.Nangangahulugan ito ang pag-download ng software (naka-embed na software) na nagsasagawa ng gawain ng pag-decode ng mga signal ng control mula sa transmiter ng RC, pagproseso ng signal input sensor (accelerator, gyroscope) at pagbibigay ng mga signal ng control para sa ESC na paikutin ang mga engine sa isang naibigay na bilis.
Alisin ang mga propeller para sa kaligtasan! Ang baterya ay hindi kinakailangan para sa mga unang ilang mga hakbang sa pag-setup, tanging ang kapangyarihan ng USB.
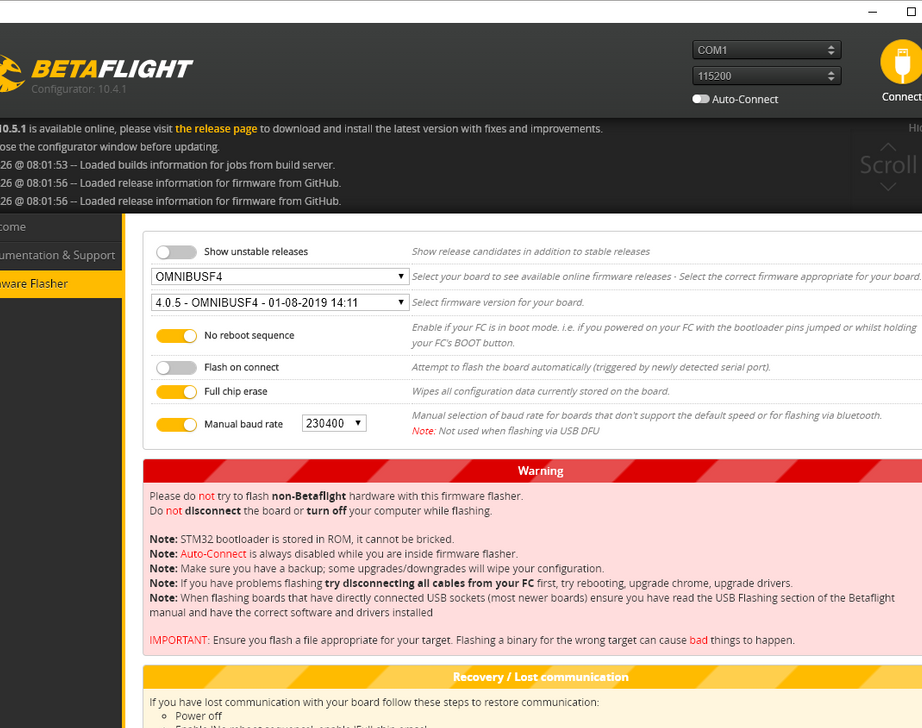
I-download ang Beta Configurator
Ikonekta ang micro USB cable sa flight controller. Mangyaring tandaan na maaaring mas madaling gawin ito kung ang controller ay hindi naka-screw sa chassis.
I-download at i-upload ang naaangkop na firmware para sa flight controller.
betaflight-setting-legoquad.txt
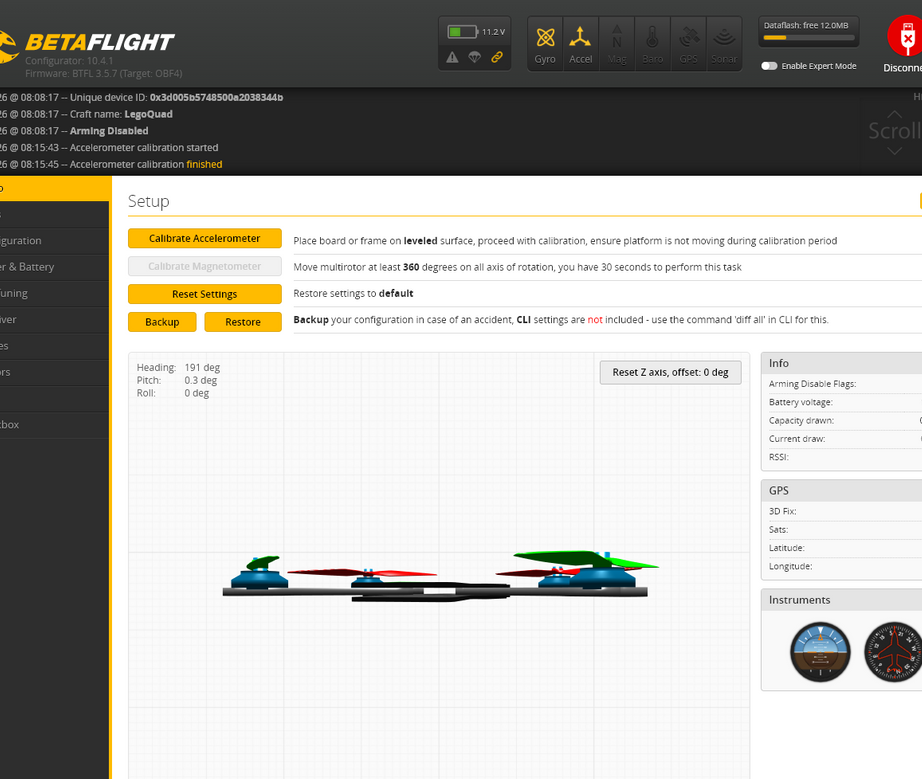
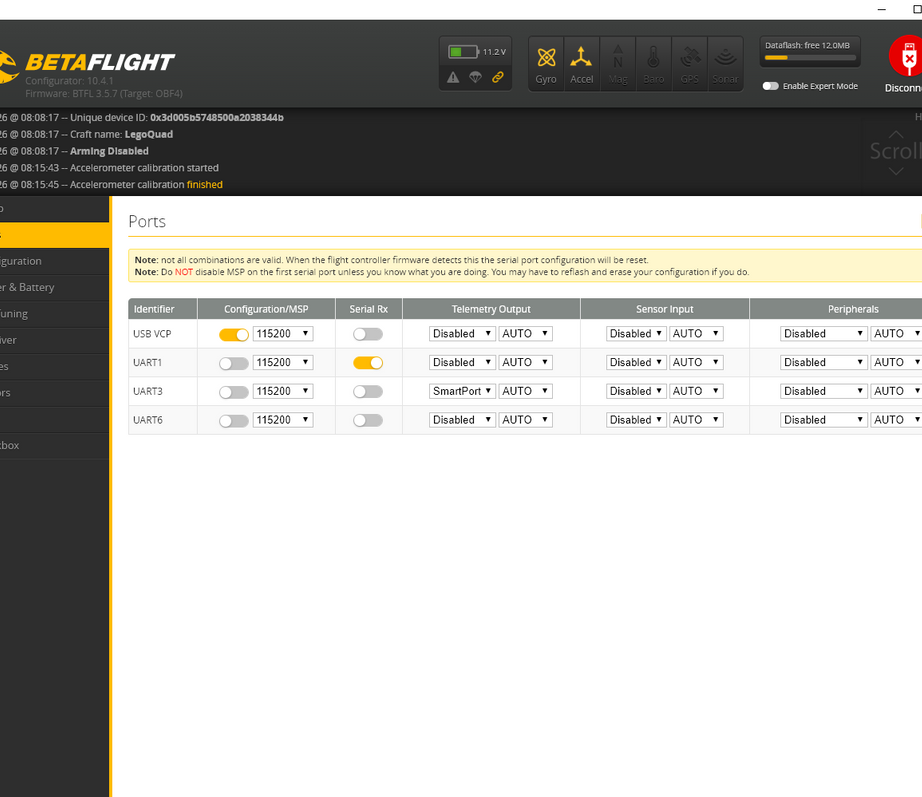
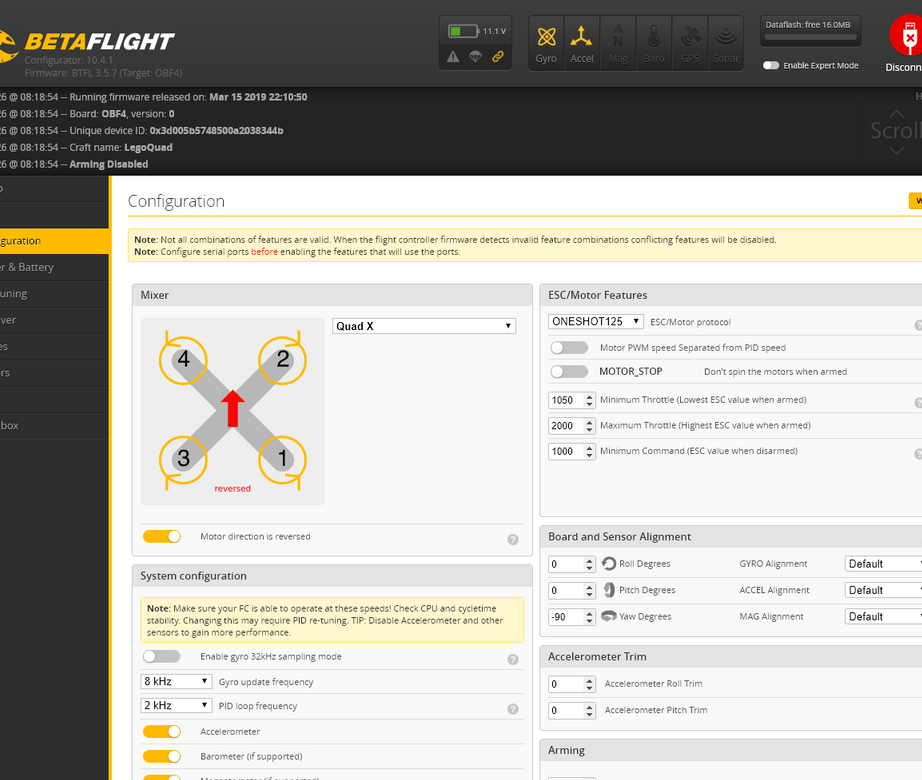
I-click ang pindutan ng "Ikonekta" at i-configure ang mga sumusunod na setting:
1. Pag-setup - modelo ng pagkakalibrate ng mga makina
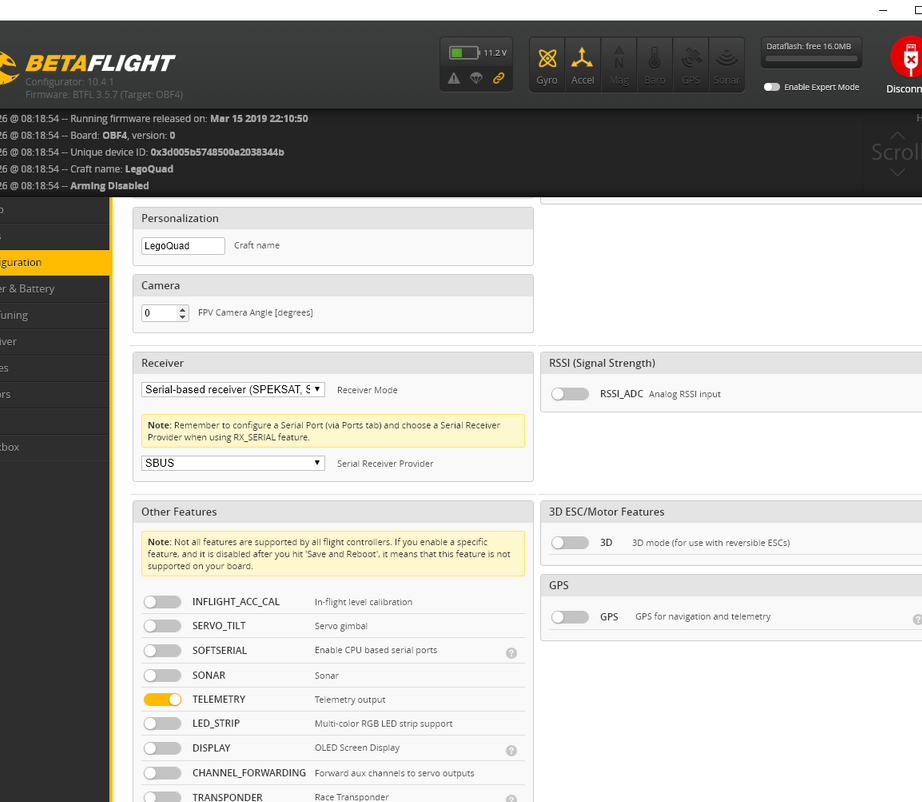
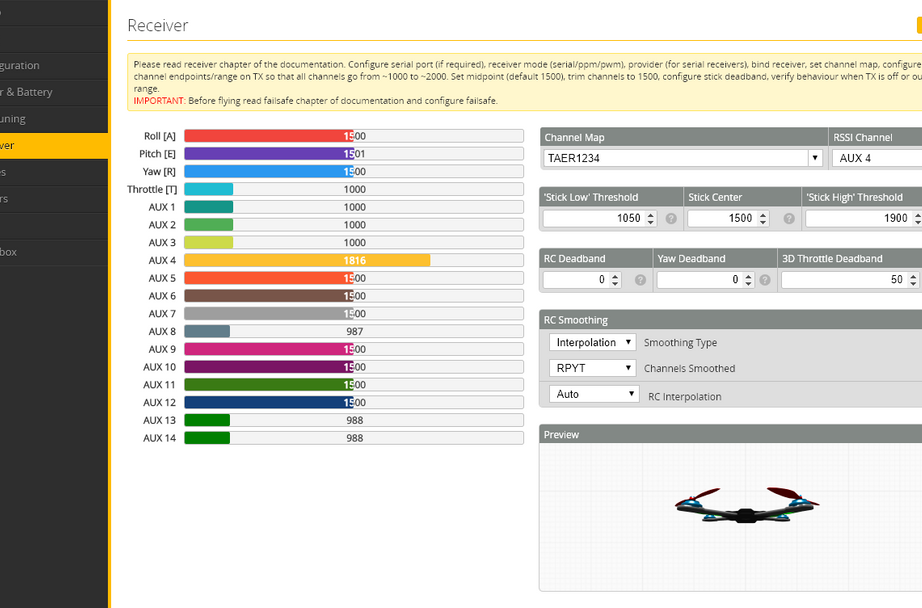
2. Tukuyin ang mga port - UART1 - Serial RX para sa pagkonekta sa SBUS RC na tatanggap
3. Pag-save at pag-reboot
4. Magtatag ng isang koneksyon sa pagitan ng tatanggap at transmiter
5. Sobrang karga
6. Ang halaga para sa PID master ay nakatakda sa 250
7 Ikonekta ang baterya
8. Ayusin ang boltahe.
9. Tiyaking tama ang iyong pagpapakita ng channel at direksyon ng kontrol, kung ang lahat ay naka-set up, ang imahe ng modelo ng quadcopter sa ibabang kanang sulok ay dapat lumipat sa lahat ng tamang direksyon kapag nililipat ang mga joystick sa RC controller.
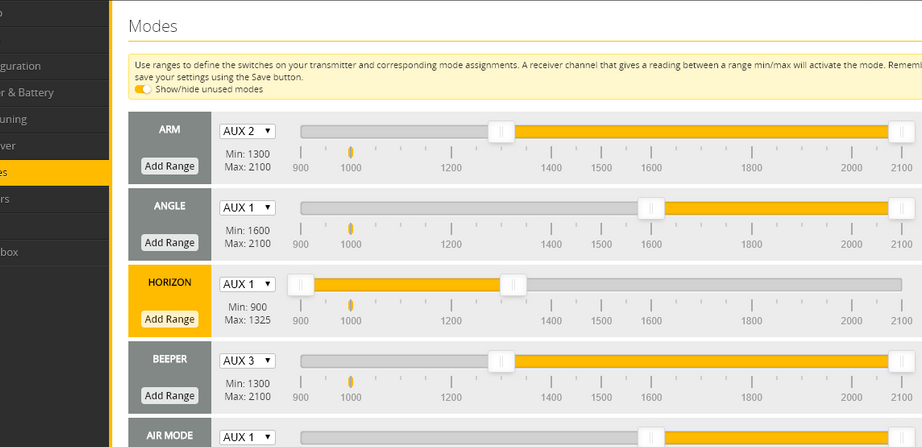
Kinumpirma ang mga mode.
ARM on / off
HORIZON self-leveling / ACRO para sa tradisyunal na paglipad ng FPV
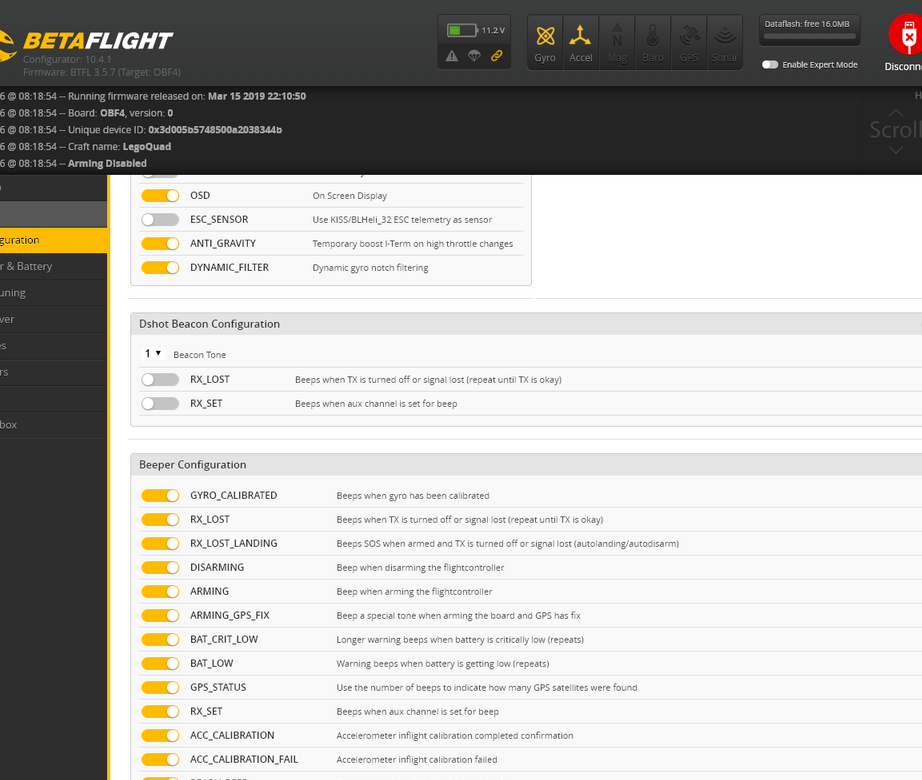
BEEPER - Kapaki-pakinabang kung nawala mo ang modelo sa matataas na damo o bushes.
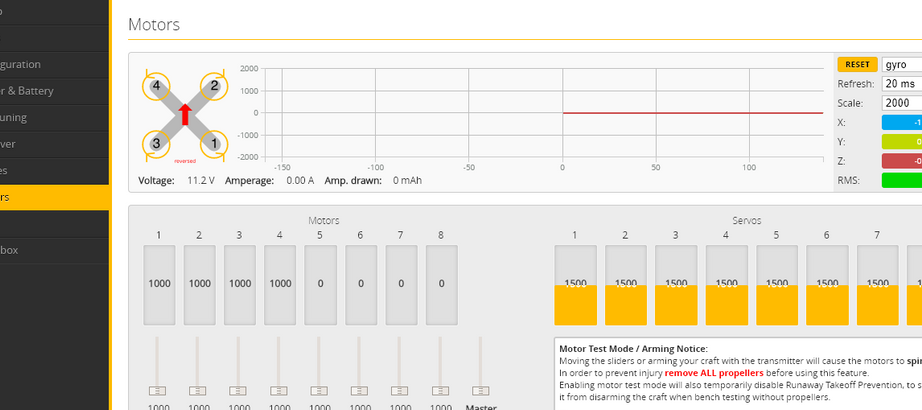
Tab na "Motors" - gamitin ang pagpipiliang ito upang suriin ang bawat engine nang paisa-isa, at, mahalaga, markahan ang direksyon ng pag-ikot ng bawat isa sa kanila
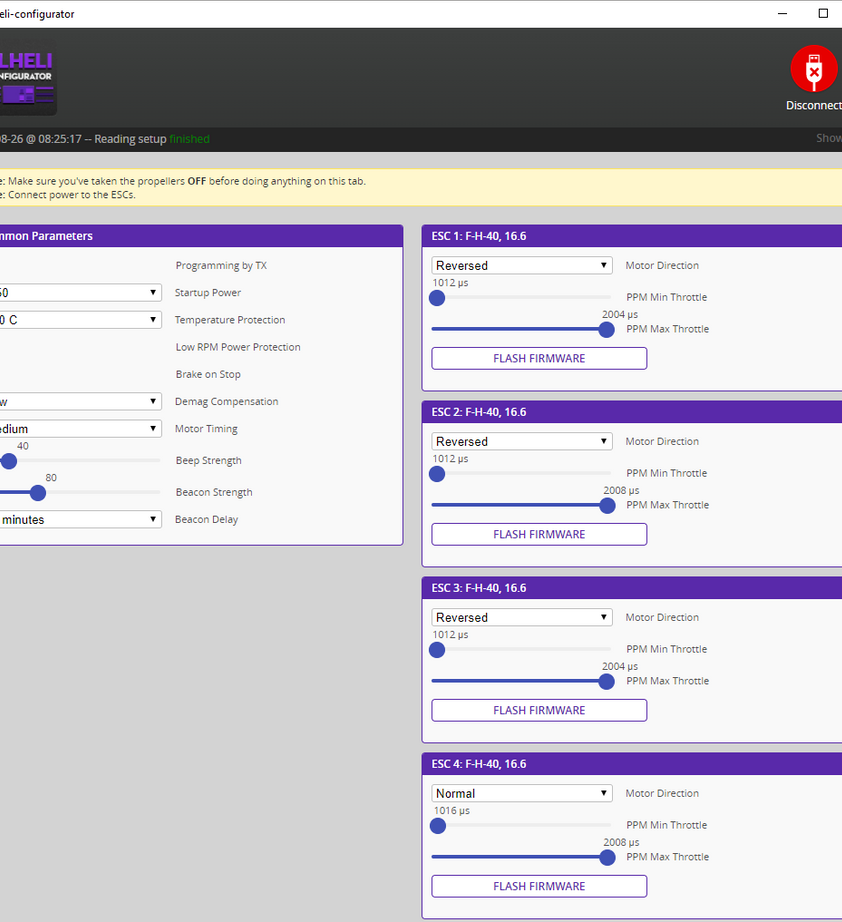
Ituwid ang anumang maling direksyon ng pag-ikot sa configurator ng BLHELI
Matapos ang lahat ng mga hakbang na ito, maaari mong idiskonekta ang USB at ang baterya, at pagkatapos ay i-on ang kapangyarihan at suriin na gumagana ang lahat:
I-on ang transmiter at kapangyarihan
Ikonekta ang baterya at i-mount ang quadrocopter sa isang patag na ibabaw
I-on ang ARM switch at ang mga motor ay dapat magsimulang magsulid sa isang mababang bilis.
Suriin ang throttle habang tumataas ang bilis
Sa pahalang na mode, subukang tililing ang quadrocopter at tiyaking naaakma nang gumanti ang mga engine, halimbawa, ikiling ito pasulong at ang mga makina sa harap ay mapabilis.

Hakbang Ika-anim: Pangwakas na Assembly
Halos ang buong istraktura ng kaso ay gaganapin sa mga naka-mount na kandado. Ginagamit lamang ng master ang mainit na natutunaw na malagkit upang mai-mount ang mga motor.


Handa na ang lahat at maaari mong subukan.



