Matagal nang interesado ang master sa mga modelo ng sasakyang panghimpapawid. Sa una ito ay isang modelo ng sasakyang panghimpapawid, pagkatapos ay quadrocopters. Sa artikulong ito, sasabihin sa iyo ng wizard kung anong mga materyales ang pipiliin para sa isang quadrocopter, pati na rin kung paano gumawa ng isang frame mula sa playwud. Panoorin natin ang isang maikling video sa demo.
Upang makagawa ng isang quadrocopter, ginamit ng master ang sumusunod
Mga tool at materyales:
-Birch playwud;
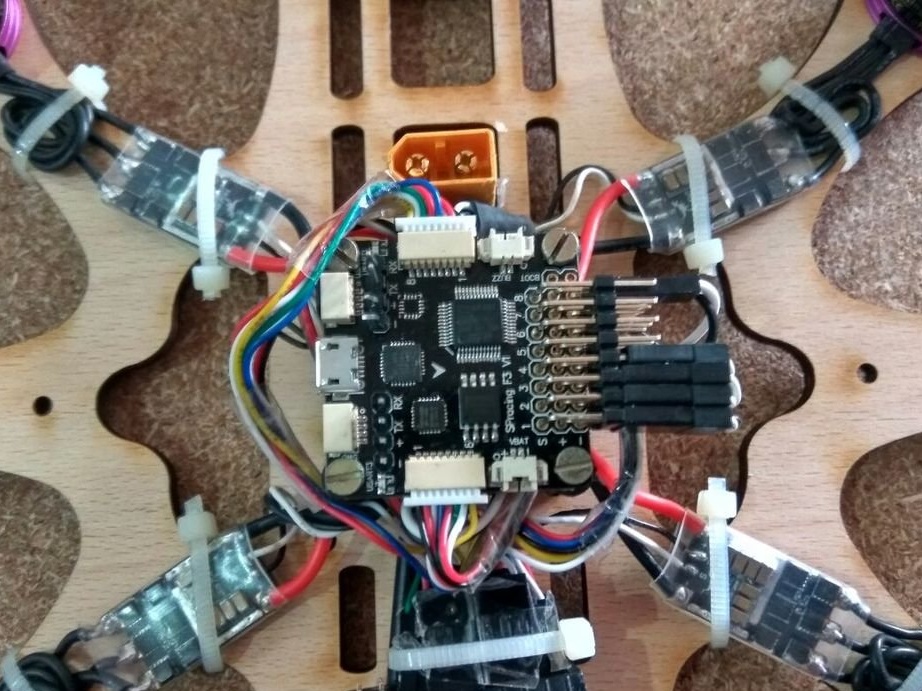
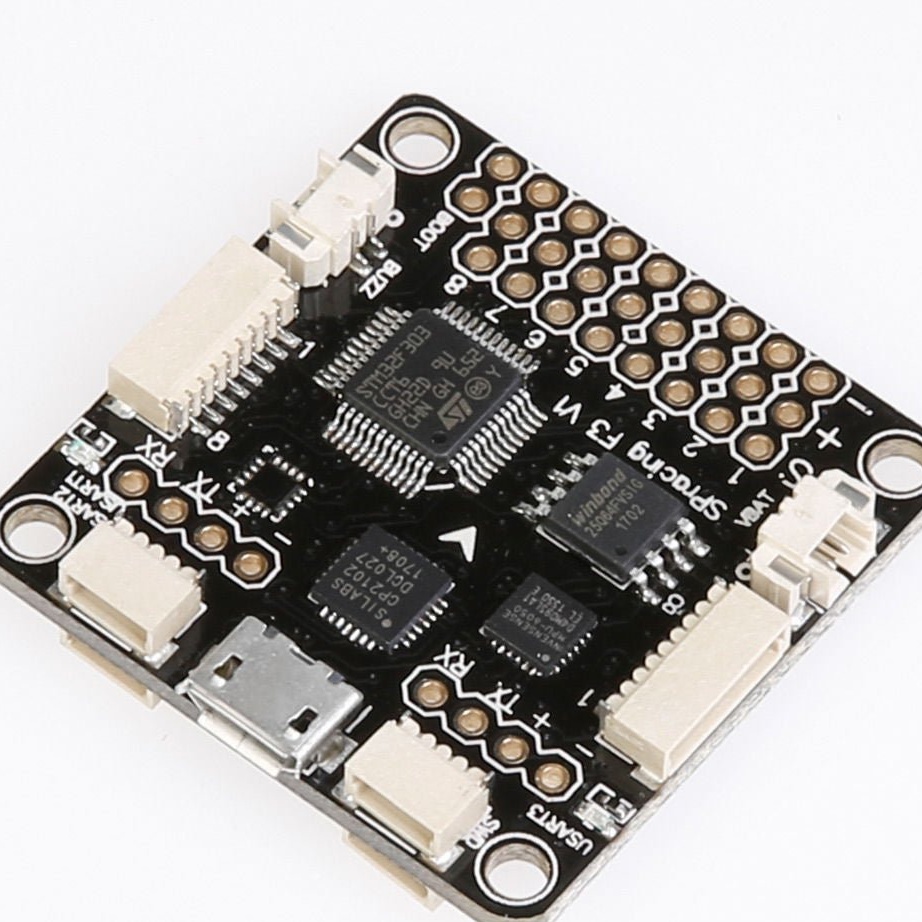
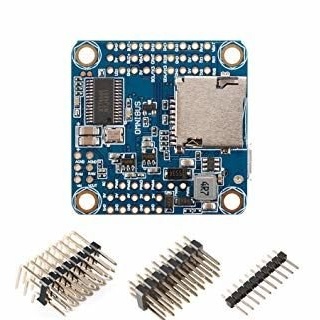
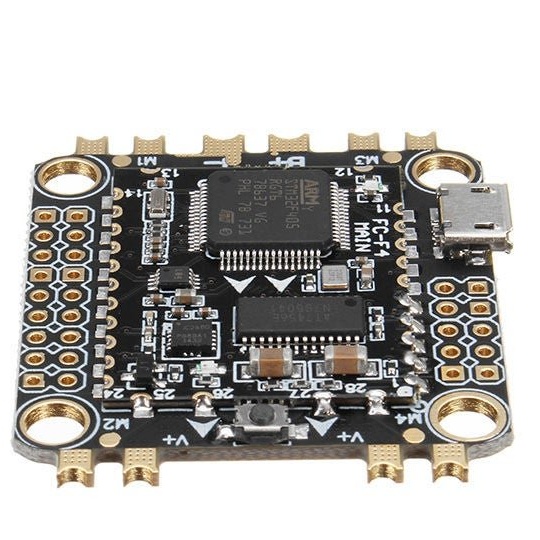
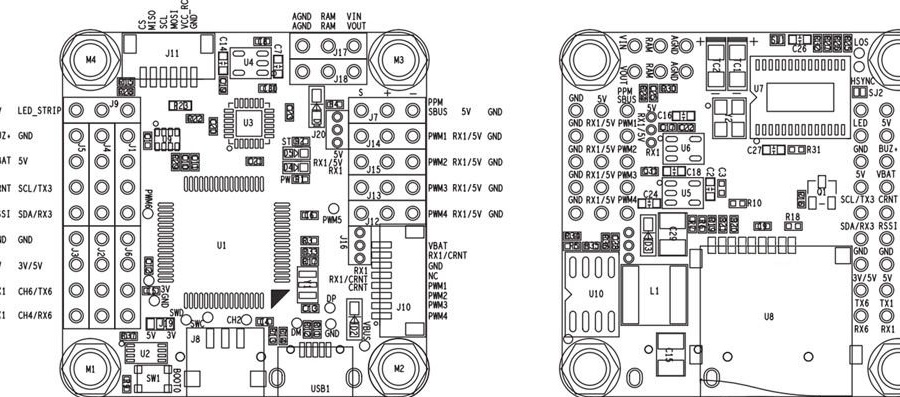
-Omnibus F4 controller, SP Karera F3;
-Mateck kapangyarihan pamamahagi board;
- Controller HGLRC 28A BLHeli ESC - 4 na mga PC;
- Motor Racestar BR2204 2600Kv Karera ng Edition -4 na mga PC;
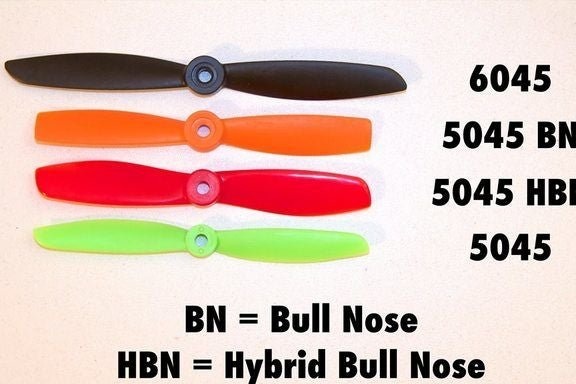
- Mga Propellers KingKong 5X4X3 - 4 na mga PC;
- Flsky TH9X radio module na may tatanggap;
Mga Gens ng baterya 3800 mAh;
-Racks; - 16 mga PC;
-Screws M3;
- distornilyador;
-Mga accessory;
-Knife;
- CNC pamutol;
Hakbang Una: Pagpili ng Materyal
Frame.
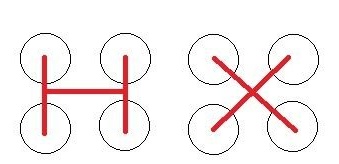
Karaniwan ang frame ay gawa sa ilaw at matibay na mga sangkap, tulad ng fiberglass, carbon fiber, kahoy, aluminyo, atbp Maraming iba't ibang mga uri ng mga frame, ang master ay gagawa ng isang frame para sa apat na mga makina.
Ang ganitong mga frame ay higit sa lahat sa H-form o X-form. Ang X-hugis ay isang mahusay na balanse sa pagitan ng katatagan at kakayahang magamit. Ang frame na ito na gagawin ng master.
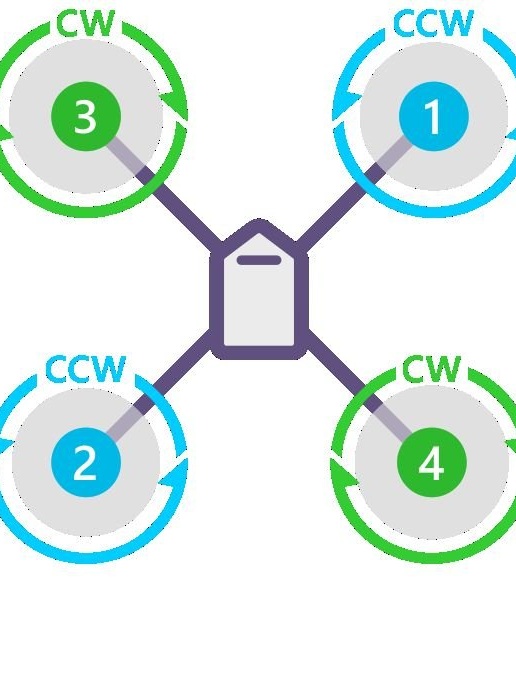

Controller
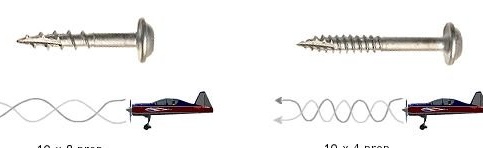
Kinokontrol ng Controller ang pagpapatakbo ng mga makina. Ipinapakita ng diagram na ang lahat ng mga engine ay umiikot sa kabaligtaran ng mga direksyon upang neutralisahin ang metalikang kuwintas na nilikha ng bawat engine. Ang Controller ay ang utak ng isang quadrocopter, ito ay karaniwang isang maliit na computer na gumagamit ng mga sensor nito upang patuloy na masukat ang anggulo at bilis.
Ang mga flight Controller ay pangunahing inuri ayon sa mga pagtutukoy sa processor.

Mga makina
Mayroong dalawang uri ng motor, walang motor na motor at walang brush na motor. Karamihan sa mga quadrocopter ay gumagamit ng mga motor na walang brush na maaaring tumugon nang mabilis sa mga pagbabago sa mga kinakailangan sa bilis at metalikang kuwintas. Para sa mga motor na walang brush, espesyal electronic bilis ng controller (ESC).
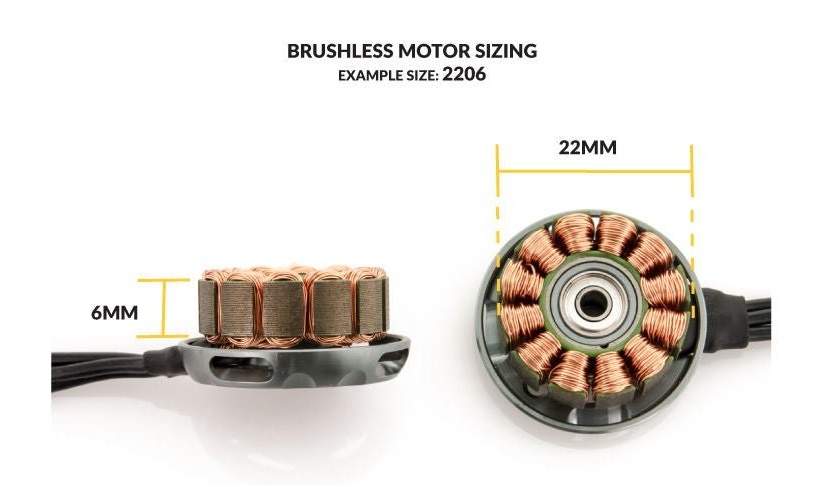
Ang laki ng walang motor na motor ay ipinahiwatig ng isang 4-digit na numero - AABB. Ang "AA" ay ang lapad ng stator, at "BB" ang taas ng stator o diameter ng stator, pareho sa mm (milimetro). Halimbawa, ang Racestar BR2205 ay may isang stator na may diameter na mga 22 mm at isang taas na halos 05 mm.
Sa katunayan, mas mataas ang stator, mas malaki ang lakas sa mas mataas na bilis, at mas malawak ang stator, mas malaki ang metalikang kuwintas sa mas mababang bilis.
Ang halaga ng KV ng motor ay nagpapahiwatig ng bilis kung saan ang motor ay iikot kapag inilalapat mo ang 1 bolta sa mga paikot-ikot na ito.Ito ay tinutukoy ng bilang ng mga paikot-ikot na tanso wire sa motor stator at ang magnetic na puwersa ng mga magnet.
Mas kaunting mga paikot-ikot na nangangahulugang mas kaunting pagtutol, at samakatuwid ay mas mataas na rpm. Ito ang dahilan kung bakit ang mga makina na may mas mataas na KV ay may posibilidad na mas mababa ang stator na paikot-ikot.
Tinutukoy ng KV kung aling tornilyo ang maaari mong magamit sa engine. Ang mas mababang KV, mas malaki ang turnilyo na maaari itong paikutin, at kabaligtaran. Hindi posible na madagdagan ang nakakataas na puwersa sa pamamagitan ng pag-install ng isang mas malaking turnilyo sa engine na may mas mataas na KV, dahil ang mga kinakailangan sa metalikang kuwintas ay lalampas sa pinahihintulutang kapangyarihan at ang engine ay overheat.
Halimbawa: Ang motor motor ng BR2205 2600 kV ay maaaring gumana sa 5x4 pulgada na mga screws, at ang mga motor motor ng BR2212 1000 kV ay maaaring gumana sa 10x4.5 pulgada na screws
Ang KV ay hindi nangangahulugang isang tagapagpahiwatig ng output ng lakas ng engine; ang mga makina na may mas mataas na KV ay hindi kinakailangan mas malakas kaysa sa mga makina na may mas mababang KV.


Mga elektronikong bilis ng Controller (ESC).
Ang mga kamakailang pagsulong sa mga mini quadrocopter ay naging posible sa pamamagitan ng pagdating ng maliit na elektronikong mga controller ng bilis na nagpapahintulot sa mga walang motor na gumana. Ang operasyon ng mga elektronikong bilis ng kontrol ay upang makatanggap ng signal ng throttle mula sa flight controller at mapanatili ang pag-ikot ng engine sa kinakailangang bilis.
Ang isang bilang ng mga teknolohiya ay gumagana sa loob ng mga maliliit na aparato na lampas sa saklaw ng manu-manong ito. Kapag bumili, pumili ng isang ESC na may isang rate ng direktang kasalukuyang ng hindi bababa sa 20% higit pa kaysa sa kinakalkula.


Mga Propeller.
Binago ng mga tagapagtaguyod ang mekanikal na enerhiya ng mga engine sa traksyon. Ang laki at hugis ng propeller ay gumaganap ng malaking papel sa kahusayan sa paglipad.
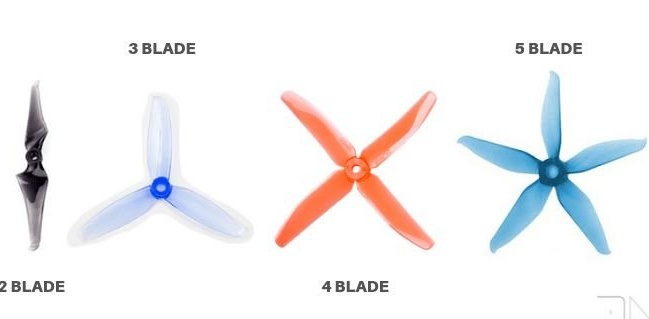
Mayroong 2 uri ng mga format na ginagamit ng mga tagagawa: L x P x B | LLPP x B. Kung saan, L ang haba, P ang pitch, B ang bilang ng mga blades.
Ang mga propeller ay maaaring gawin ng iba't ibang mga materyales, tulad ng plastic composite, carbon fiber, kahoy, atbp Ang bawat uri ng materyal ay may natatanging katangian, halimbawa, carbon fiber at kahoy ay talagang matibay at kilala sa kanilang makinis na operasyon, at ang ilang mga plastik ay lubos na matibay. Karamihan sa mga turnilyo na ginamit sa mini quadrocopter ay gawa sa mga plastik na composite.
Ang laki ng propeller na maaari mong gamitin ay limitado sa laki ng iyong frame, pati na rin ang HF kapangyarihan ng iyong engine. Bilang isang patakaran, ang mas maraming tagabenta na maaari mong gamitin upang lumikha ng isang tiyak na tulak, mas magiging epektibo ito. Para sa mga mini quadrocopter, nag-iiba sila sa pagitan ng 5-6 pulgada na mga tornilyo sa 4-5 pulgada.
Ang bilang ng mga blades ay nakakaapekto sa pagkagambala at pagkonsumo ng enerhiya. Ang mas maraming blades, mas maraming traction at mas maraming enerhiya ay nasayang.

Mga Baterya
Sa kasalukuyan, ang karamihan sa mga drone ay gumagamit ng mga baterya ng lithium polimer, na karaniwang kilala bilang mga baterya ng Lipo. Ang baterya kasama ang ESC at ang engine ay isang quadrocopter power system.
Huwag isipin ang baterya bilang isang reservoir ng enerhiya, ang mga motor ay maaaring hilahin ang isang napakalaking halaga ng mga amperes sa napakaikling agwat. Ang mga baterya ng LiPo ay isang hanay ng mga cell, ang bawat isa ay mayroong isang nominal na boltahe na 3.7 V. Kung kinakailangan ang isang mas mataas na boltahe, ang mga cell na ito ay maaaring konektado sa serye upang mabuo ang isang baterya. Ang mga baterya na konektado sa serye ay minarkahan ng titik na "S" at kahanay sa letrang "P".
Ang mas maraming mga cell na nakakonekta sa serye, mas mataas ang boltahe at mas maraming mga cell na kahanay, mas mataas ang kapasidad.
Halimbawa:
1S = 1 cell = 3.7 V
2S = 2 cells = 7.4 V
3S = 3 cells = 11.1 V
4S = 4 cells = 14.8 V
5S = 5 cells = 18.5 V
6S = 6 cells = 22.2 V
Ang kapasidad ay ipinahiwatig sa milliamperes o "mAh". Ito ang bilang ng mga amperes na maaaring maihatid ng baterya sa isang oras. Halimbawa, ang isang 3S 2000 mAh na baterya ay maaaring magbigay ng 2 A para sa 1 oras. kaya kung ang iyong quadcopter ay kumukuha ng 20A, pagkatapos ang flight nito ay magpapatuloy para sa 2/20 * 60min = 6 minuto.
Ang nominal discharge ay nagpapahiwatig ng maximum na bilis kung saan maaari kang gumuhit ng kasalukuyang mula sa baterya. Ito ay ipinahiwatig ng bilang na "C" sa itaas. Mas mataas ang rating C, mas malaki ang halaga ng kasalukuyang maaaring ibigay ng baterya.
Halimbawa, ang isang baterya ng 2000 mAh 25C ay maaaring maghatid ng hanggang sa 2000x25 = 50,000 mA o 50 A.



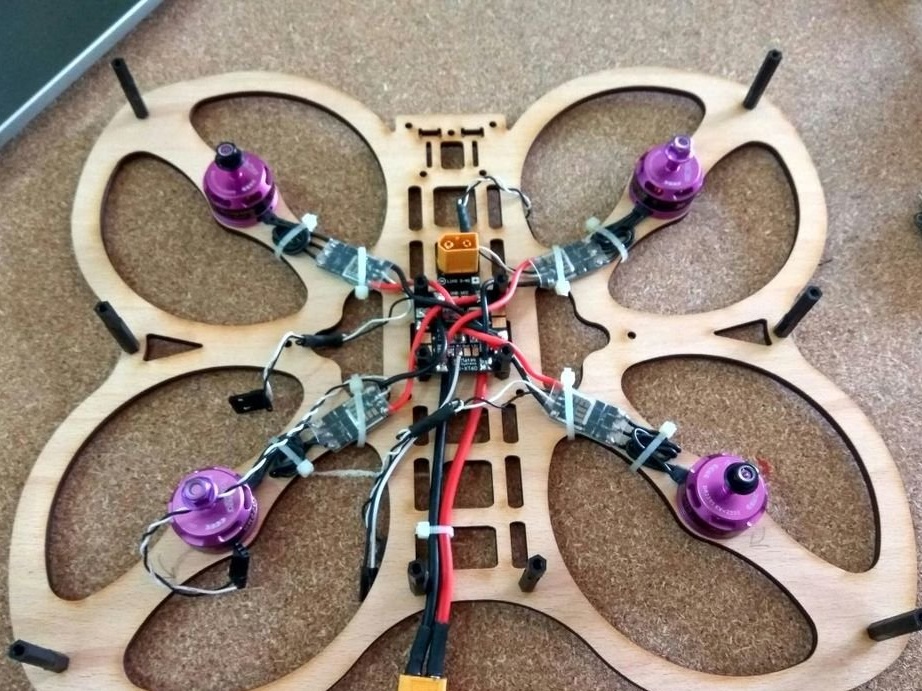
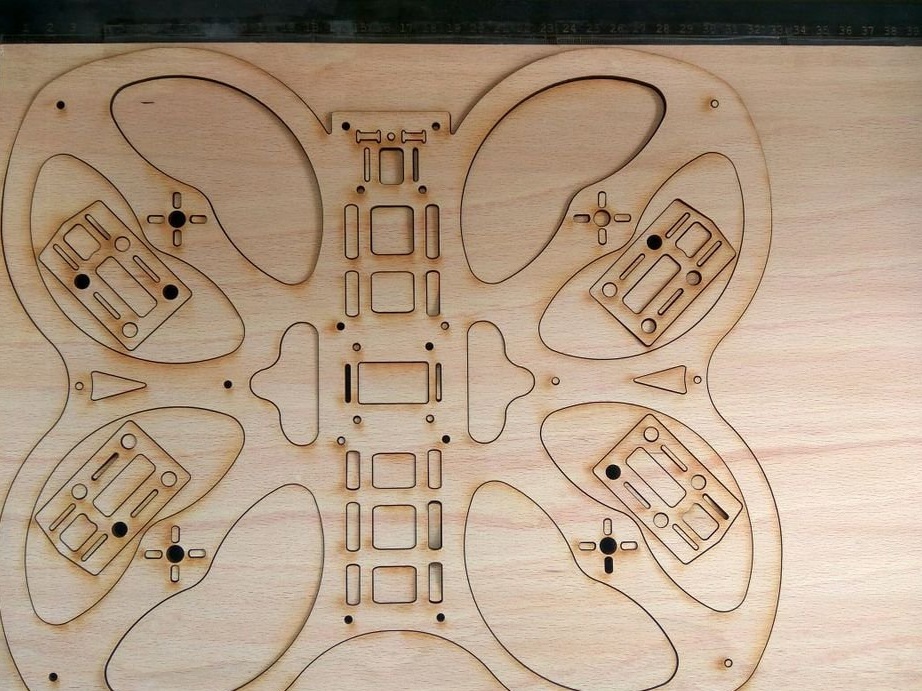
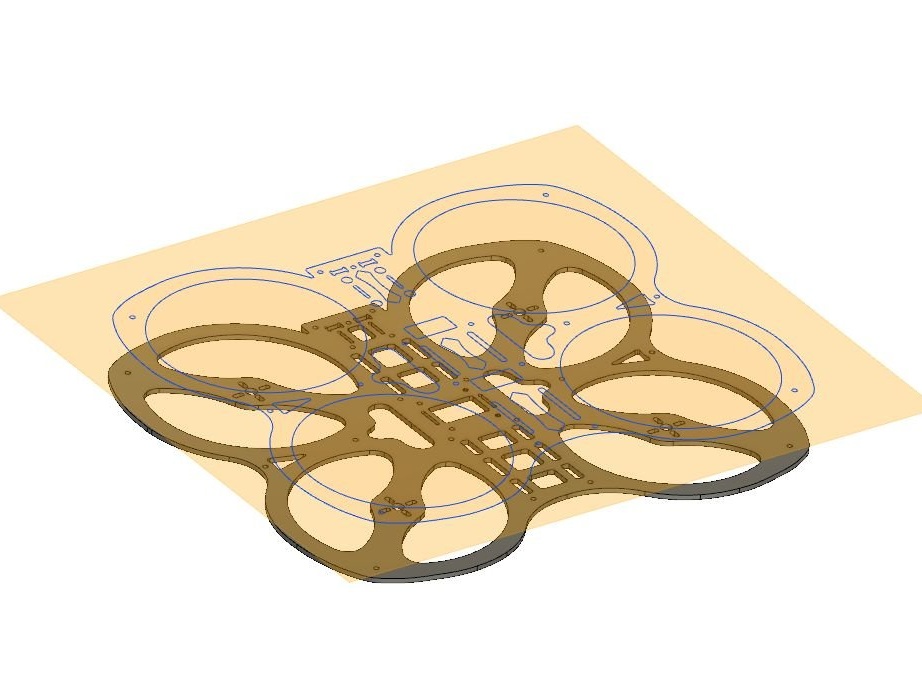
Hakbang dalawa: disenyo at pagpupulong ng frame
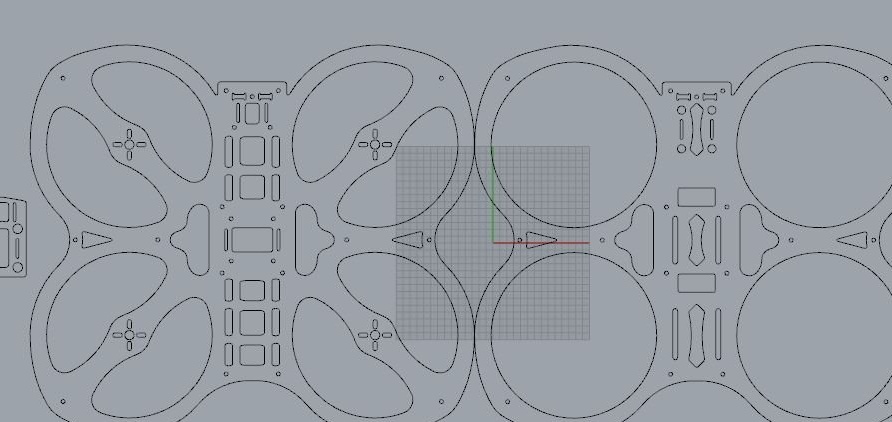
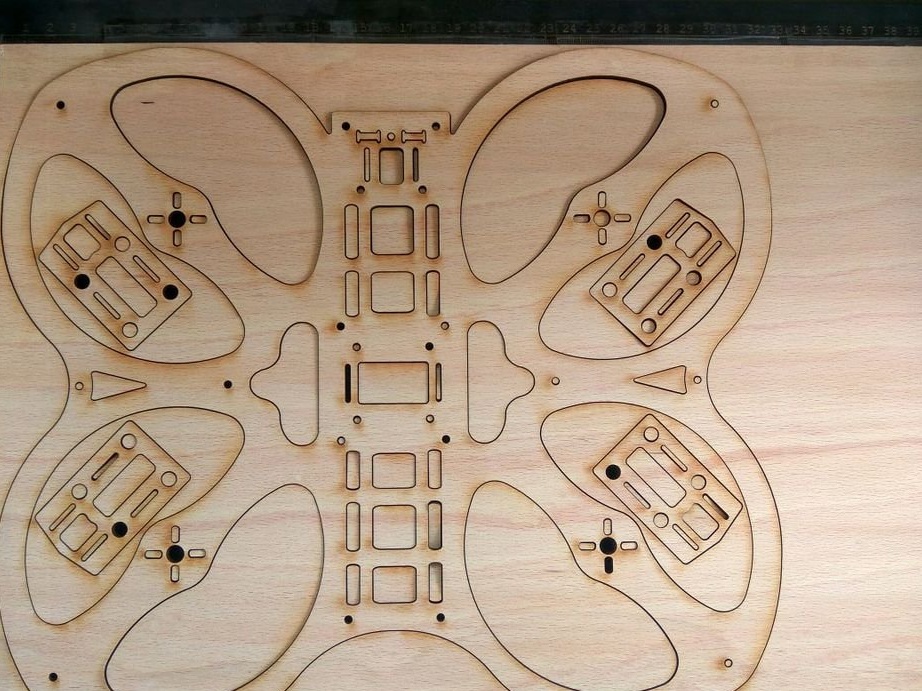
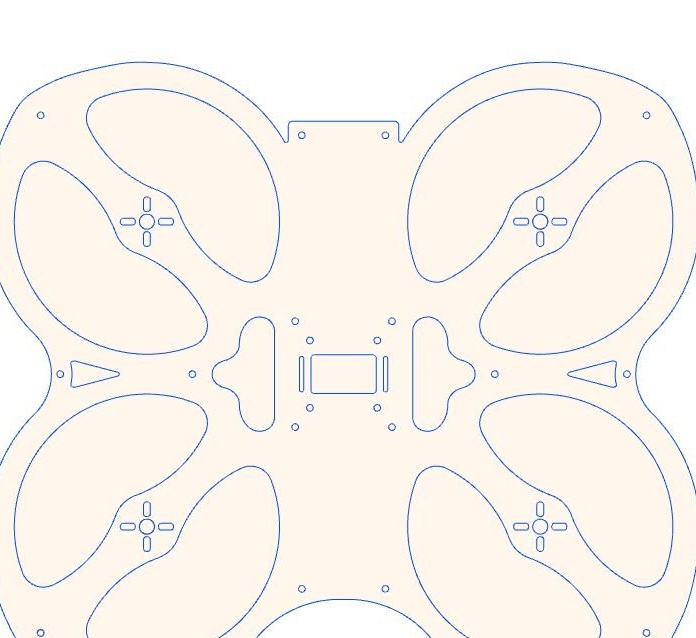
Ang disenyo ng frame ay inspirasyon ng hugis ng monarch butterfly.Kapag tiningnan mo ang frame mula sa itaas, parang dalawang pakpak.
Ang wizard ay iginuhit ang disenyo sa Fusion 360 at Rhino CAD. Ang laki ng frame ay halos 230 mm, ito ay dahil sa distansya ng dayagonal mula sa isang hub ng engine patungo sa isa pa. Ang pinakasikat na mga sukat ng frame ay 210 mm, 250 mm, atbp Kapag naitakda mo ang laki ng frame, gumuhit ng mga mount ng engine.
Ang gitnang gusali ay ang lugar kung saan mai-install ang lahat ng mga electronics, kabilang ang flight controller, receiver, baterya, atbp Sa midpoint ay mayroong 4 M3 hole sa layo na 30.5 mm mula sa bawat isa.
Ang item ay ginawa gamit ang pagputol ng laser. Kung wala kang pamutol, maaari mong i-cut sa pagawaan. Ang file para sa pagputol ay maaaring ma-download sa ibaba.
File Design.rar









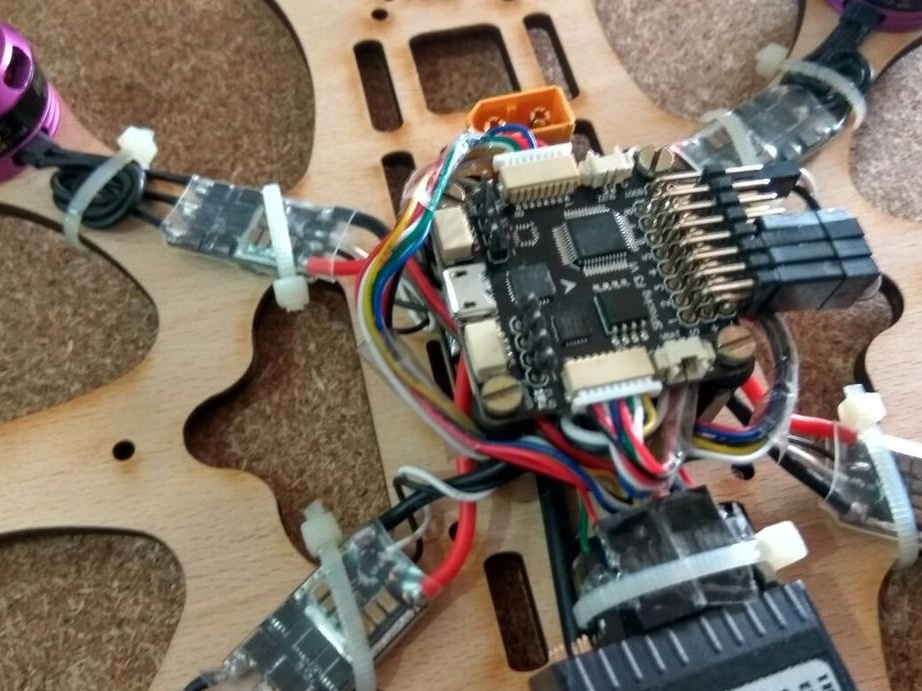
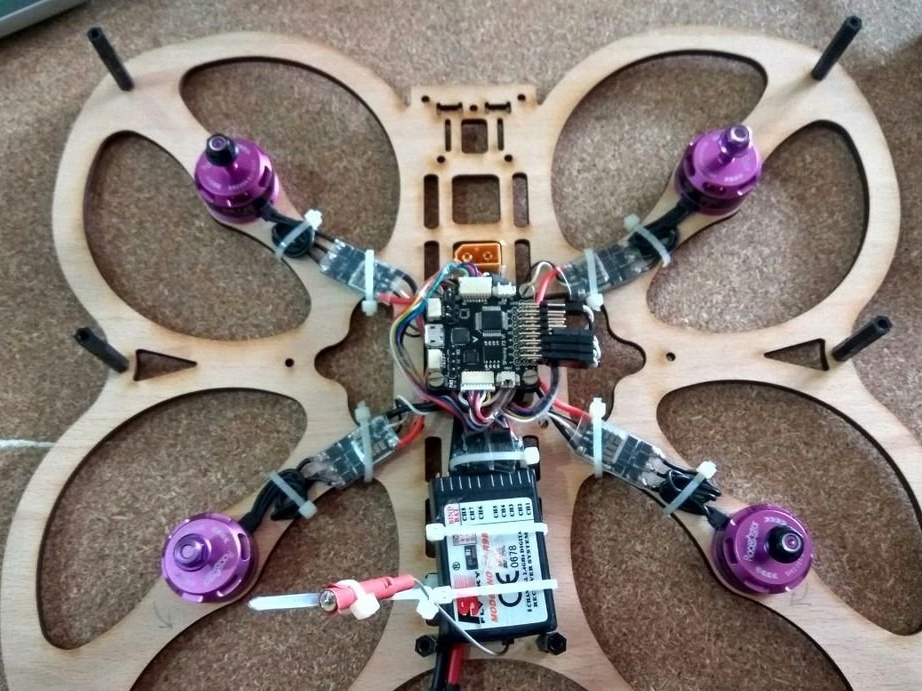
Hakbang Tatlong: Bumuo
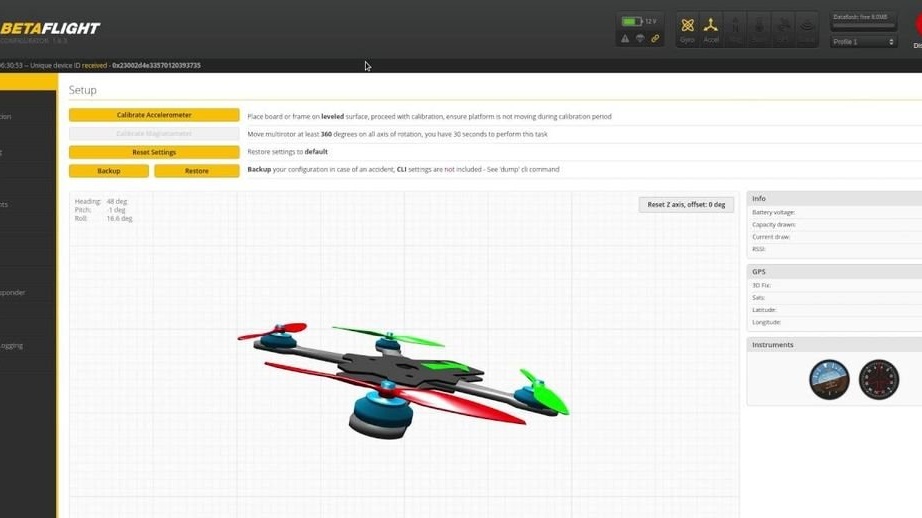
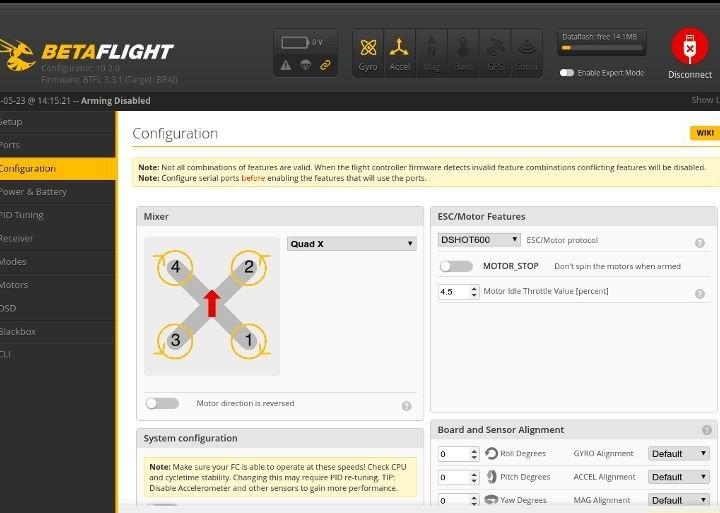
Ngayon kailangan mong mag-ipon ng isang quadrocopter.
Una kailangan mong i-flash ang controller na may firmware ng Betaflight. Pagkatapos ay i-calibrate ang sensor. Ikonekta ang module ng radyo at suriin ang operasyon nito. I-mount ang mga motor sa frame ayon sa diagram ng X-frame na may tamang direksyon ng pag-ikot. Ang pagbebenta ng motor ay humahantong sa mga terminal ng ESC at i-fasten ang ESC sa bracket. Ikabit ang power distribution board at panghinang sa mga pad ng ESC. Ikonekta ang Soler XT60 sa power cable, at pagkatapos ay sa power distribution board. Ayusin ang controller. Ikonekta ang mga wire mula sa ESC sa flight controller. I-mount ang receiver sa frame. Ilagay sa tuktok na takip.