
Ngayon mayroon kaming isa pang produktong lutong bahay mula sa AlexGyver (channel ng YouTube na "AlexGyver").


Ito ay ang robot bartender. At pagkatapos basahin ang artikulong ito hanggang sa wakas, malalaman mo kung paano iipon ang aparato sa bahay nang literal sa tuhod gawin mo mismo.
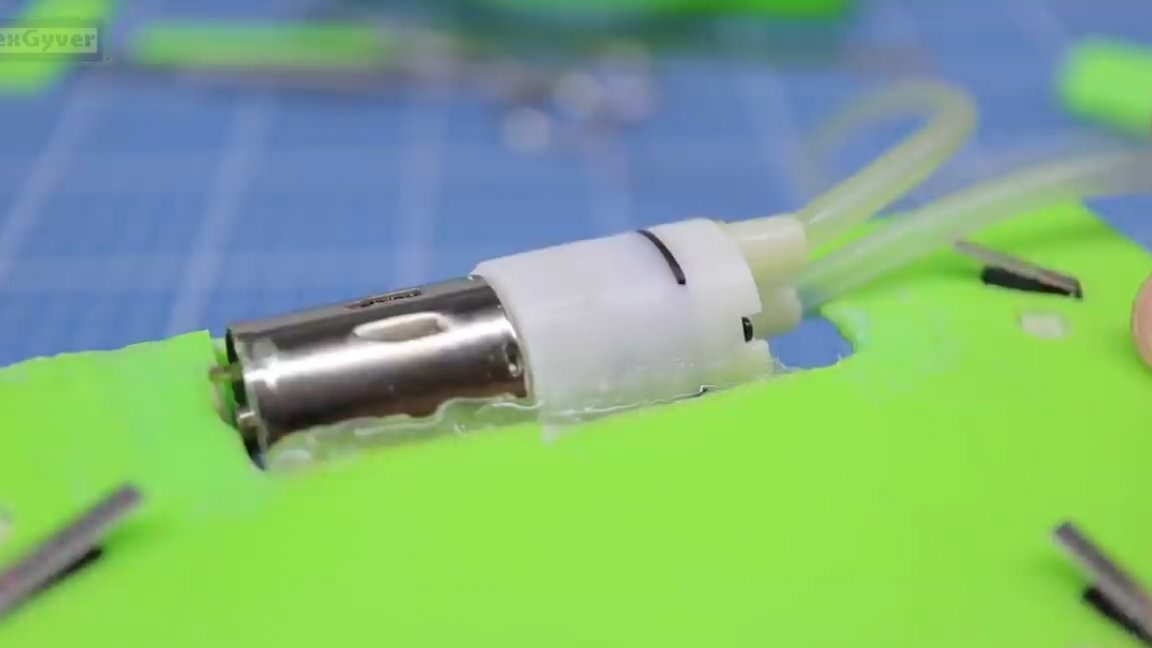
Kaya ang nalivator ay isang aparato na nagbubuhos ng mga inumin sa baso. Ang aparato na ito ay dapat na naglalaman ng isang bomba, iyon ay, na may isang espesyal na pagkain, mas mabuti. Dumaan ako ng maraming iba't ibang mga bomba sa Aliexpress, ang may-akda ay tumira sa tulad ng isang lamad:

Dagdag pa ang lahat ng nakasulat dito: pagkain. Ang mga insides ay lahat ng plastik, ang yunit ay gumagana dahil sa pagbaluktot ng ulo at mga balbula. Kung may nagnanais na mag-isip sa direksyon ng mga peristaltic na bomba - Nagmadali akong mapataob ka, napaka-maingay, mabagal, at ang stream ay ganoon.
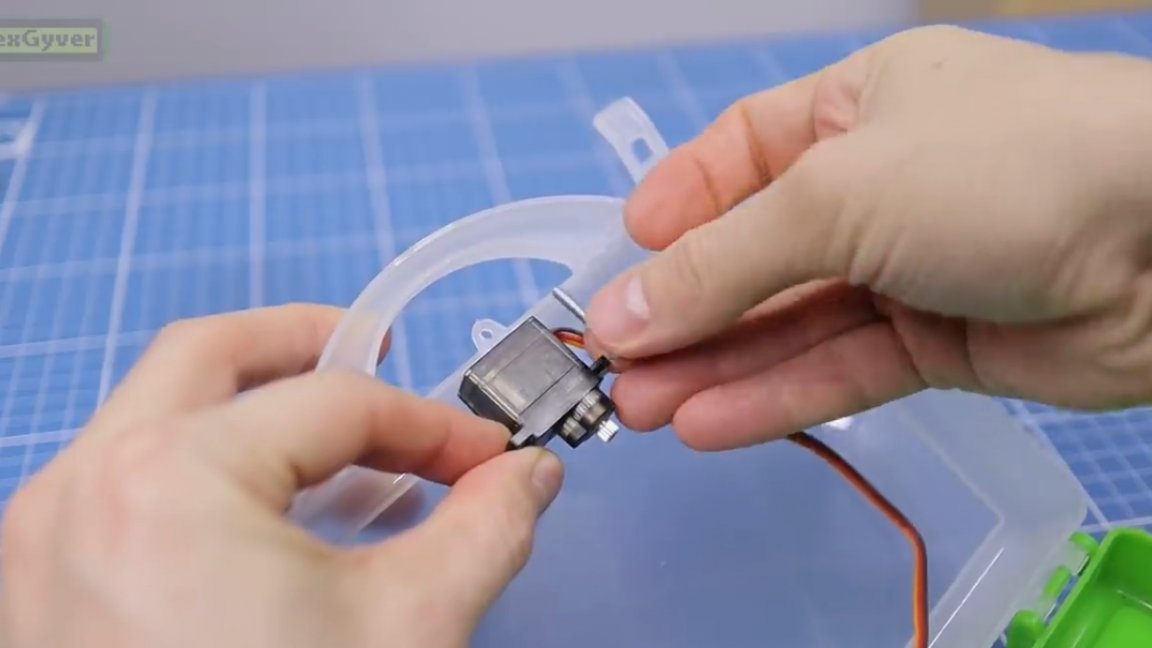
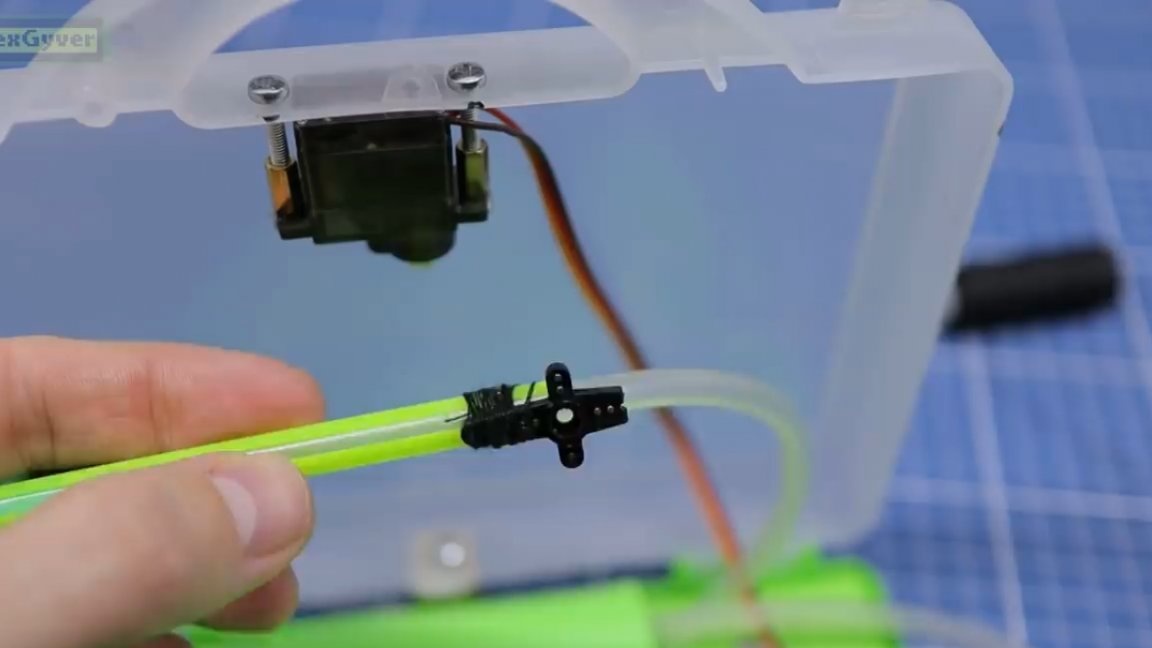
Susunod, ang mekanismo ng swivel.
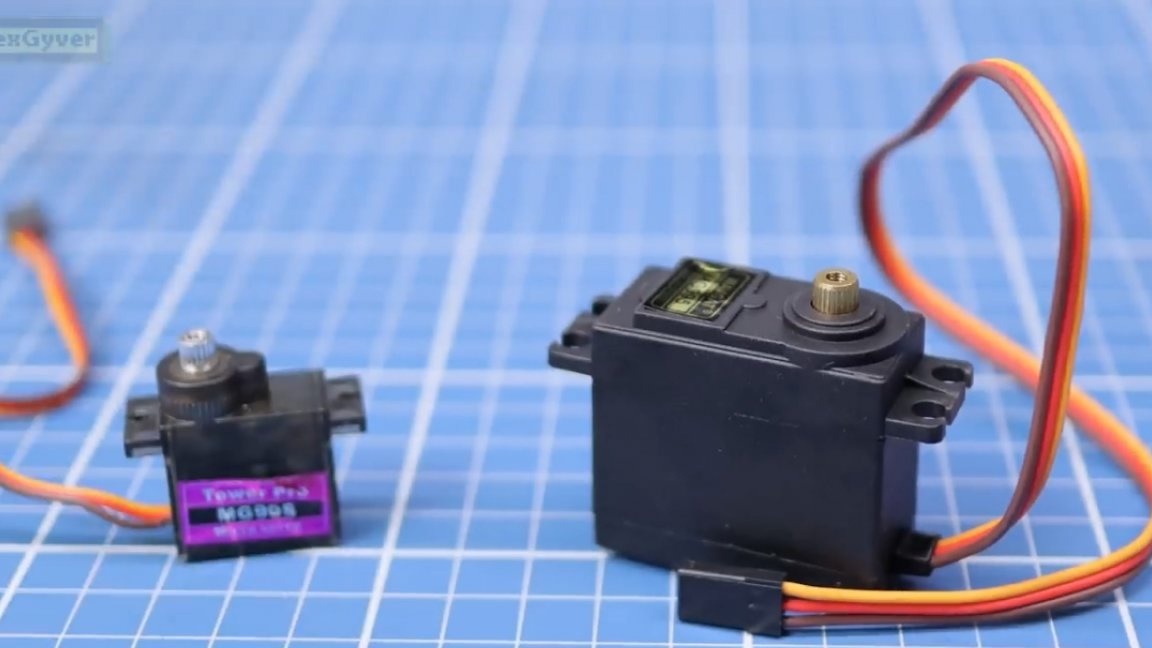
Ito, malinaw ang lahat dito. Upang ipahiwatig ang kalagayan ng mga tasa na gagamitin namin.
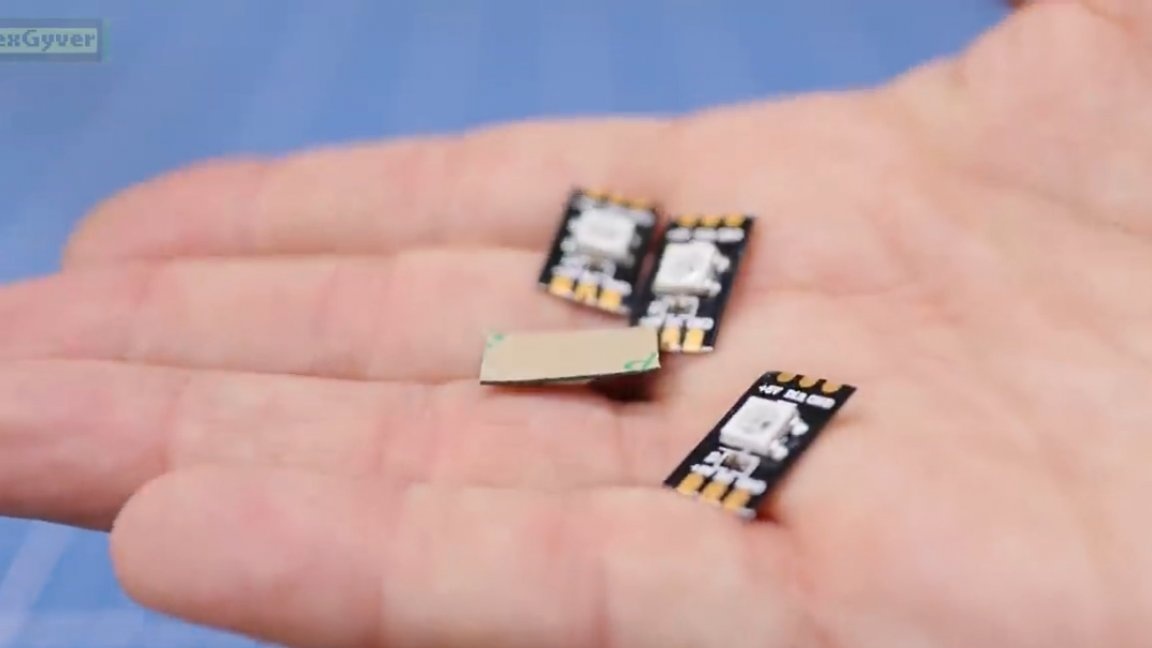
Ito ay magiging mas madali pa rin sa kanila kaysa sa ordinaryong tri-color RGB LEDs, lalo na dahil maaari silang maisakatuparan sa bersyon na ito:

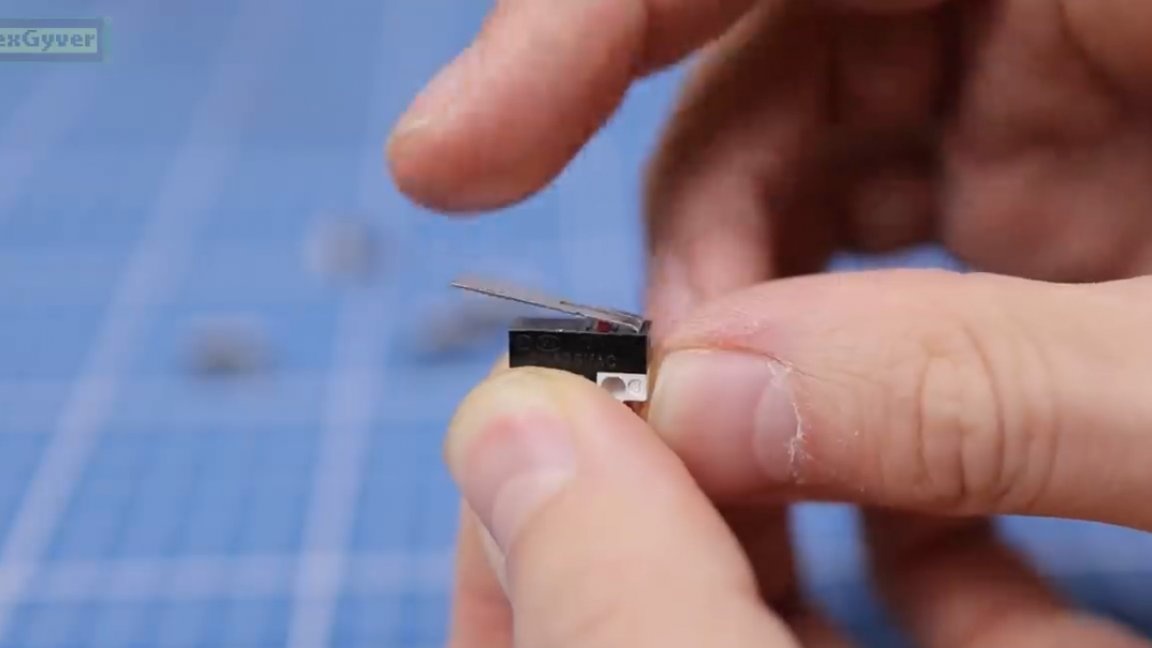
Upang kontrolin (subaybayan) ang pagkakaroon ng mga tasa, nagpasya ang may-akda na kunin, sila rin ang mga pindutan ng pagtatapos.
Gayundin, upang makontrol ang system, kailangan namin at, pati na rin

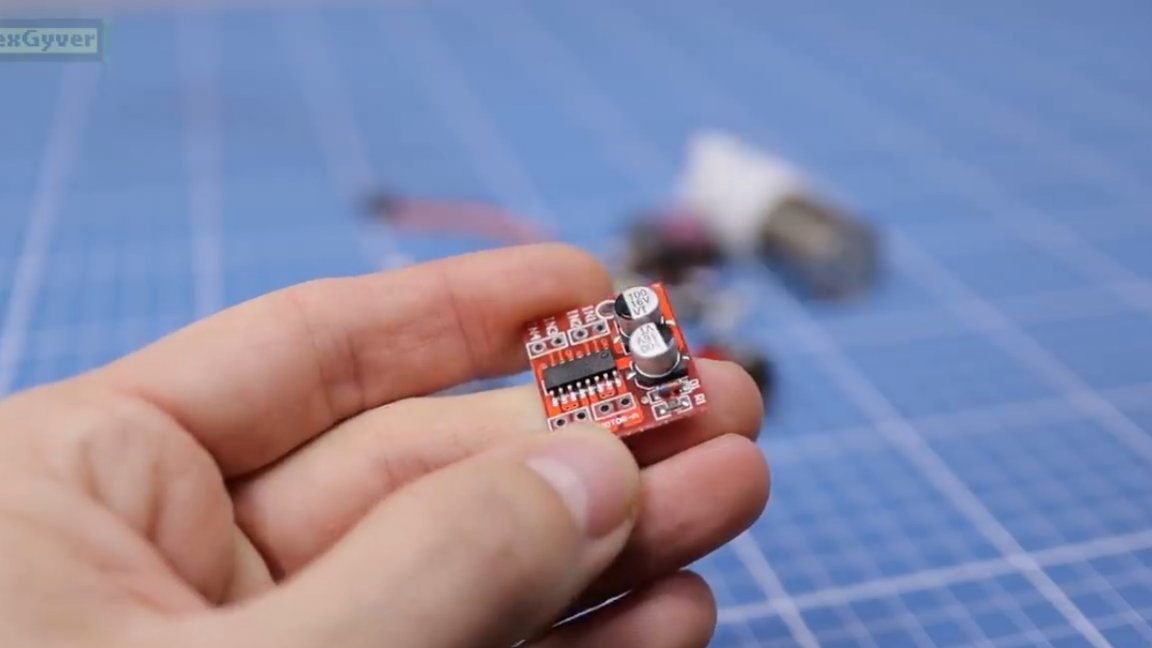
Upang makontrol ang bomba at kapangyarihan sa drive, gagamitin namin ito
At upang mapamahalaan ang lahat ng negosyong ito ay kung saan kami ay magprograma sa isang espesyal na paraan.
Sa pamamagitan ng paraan, ang aparato ay pinapagana mula sa, at para sa kailangan mo ito
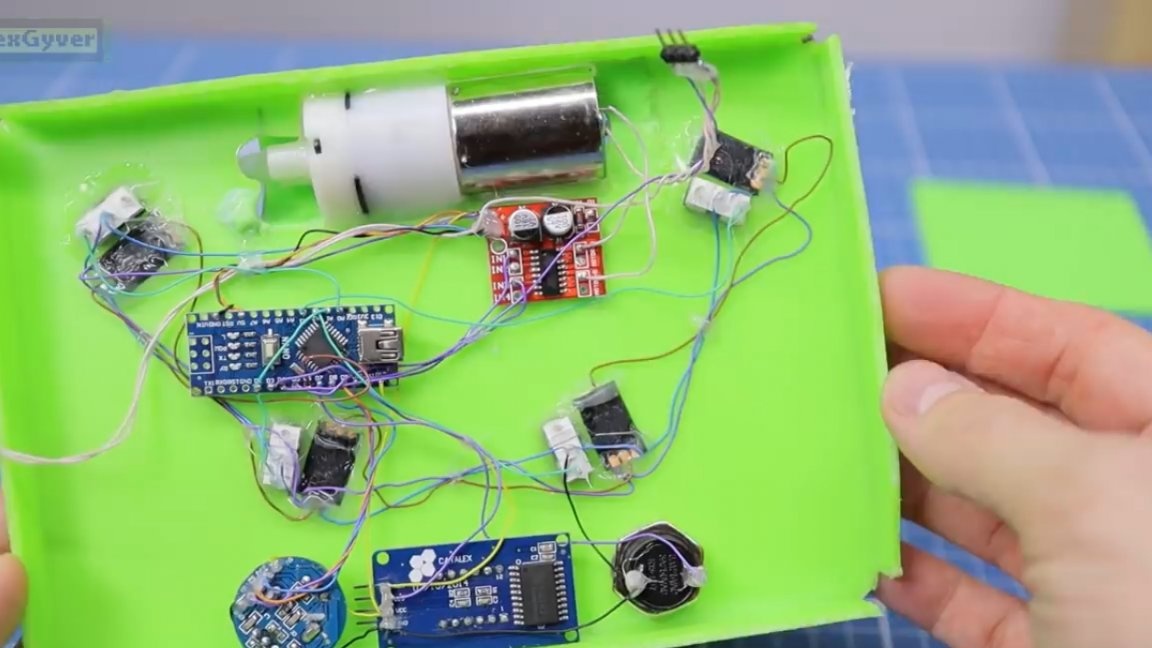
Sa totoo lang, ito ay lahat elektronika. Nasa ibaba ang lahat kinakailangang mga elektronikong sangkap sa pagkakasunud-sunod:
1)
2)
3)
4)
5)
6)
7)
8)
9) .
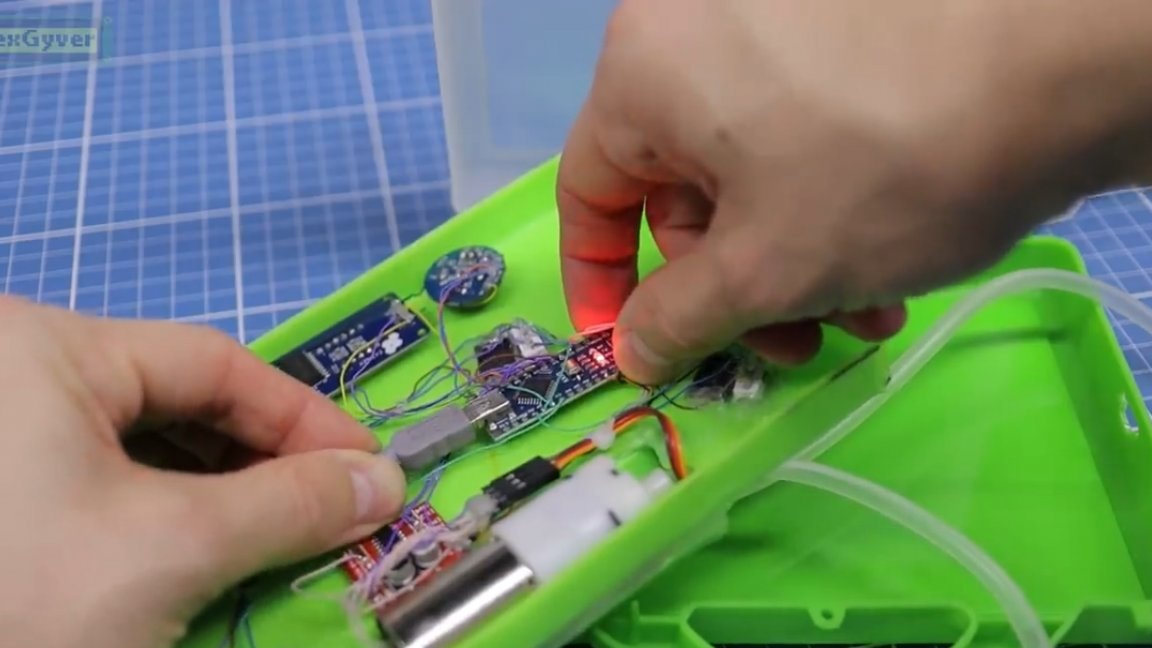
Nag-uugnay ang mga elektronika ayon sa sumusunod na pamamaraan:
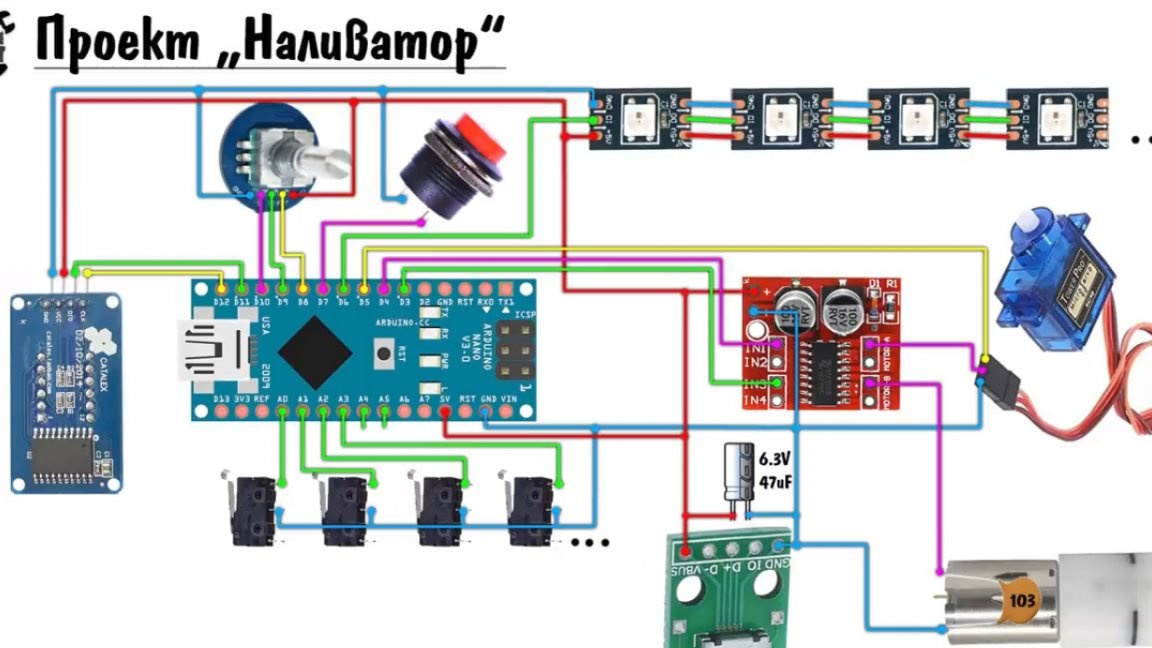
Tulad ng nakikita mo, walang partikular na kumplikado dito. Ang kapangyarihan ng servo ay nakahiwalay sa pamamagitan ng driver. Ito ay kinakailangan upang maaari mong idiskonekta ang servo mula sa kapangyarihan, sa gayon mabawasan ang pagkonsumo ng kuryente at mga tunog na inilabas nito. Gayundin, sinusuportahan ng makina na ito na gumana kasama ang bilang ng mga baso mula 1 hanggang 6 na piraso, kaya kailangan mo ng panghinang sa pagkakasunud-sunod ng maraming mga LED at pindutan hangga't kailangan mo ng mga baso, at lahat ng iba pa ay naka-configure nang direkta sa programa mismo.
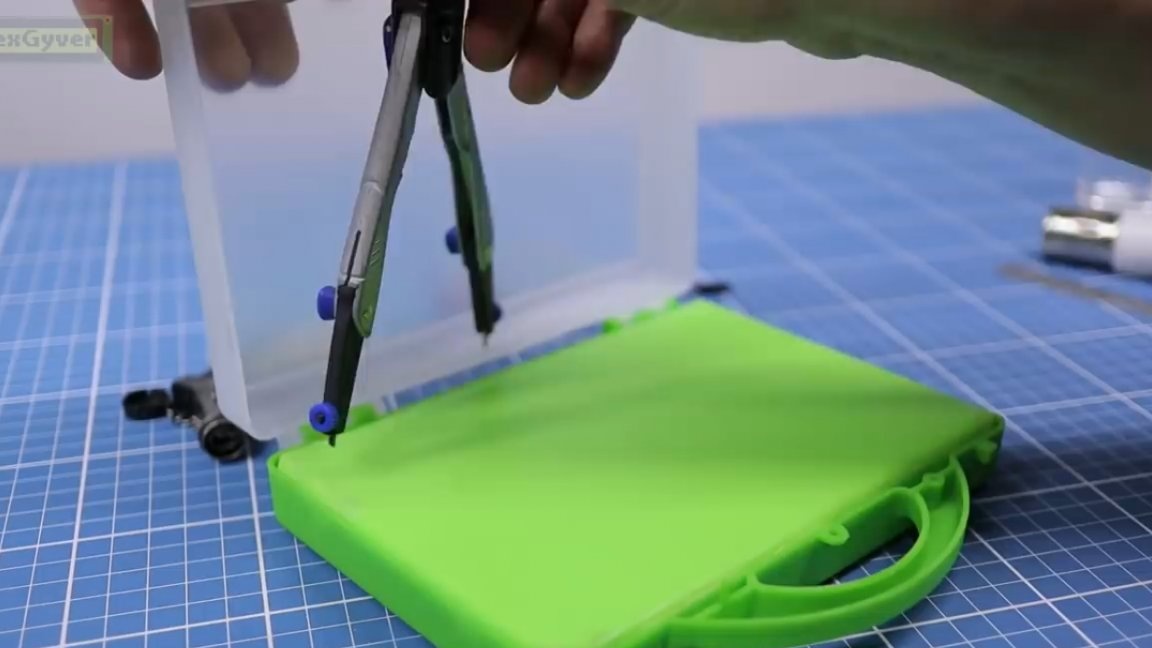
Ang nasabing kaso sa isang distornilyador mula sa Presyo ng Pag-ayos ay perpektong gampanan ang papel ng kaso:

Ang mga screwdrivers sa kanilang sarili tungkol sa wala, maaari mong itapon ang mga ito. Kailangan din namin ng plastic, halimbawa, tulad ng isang cutting board.

Nabili ito sa isang lokal na tindahan ng hardware. Ang kapal ng plastik dito ay halos 2 mm.
Susunod ang tubo. Nahanap ng may-akda ang isang angkop muli sa pag-aayos.Kakailanganin mo rin ang isang silicone tube para sa mga aquarist:

Sa susunod na mga tasa, halimbawa, tulad nito:

Nagsisimula kami sa pamamagitan ng pagkuha ng mga sukat at paggawa ng mga bahagi mula sa isang piraso ng plastik na ipapasok sa maleta at papayagan kaming ilagay ang lahat ng mga electronics sa ilalim ng isang lihim na ilalim.

Pagkatapos ay tinantya namin ang tilapon ng tubo, at subukan sa mga tasa. Ang may-akda ay gumawa ng tulad ng isang template kung saan minarkahan niya ang window para sa pindutan at butas para sa LED.

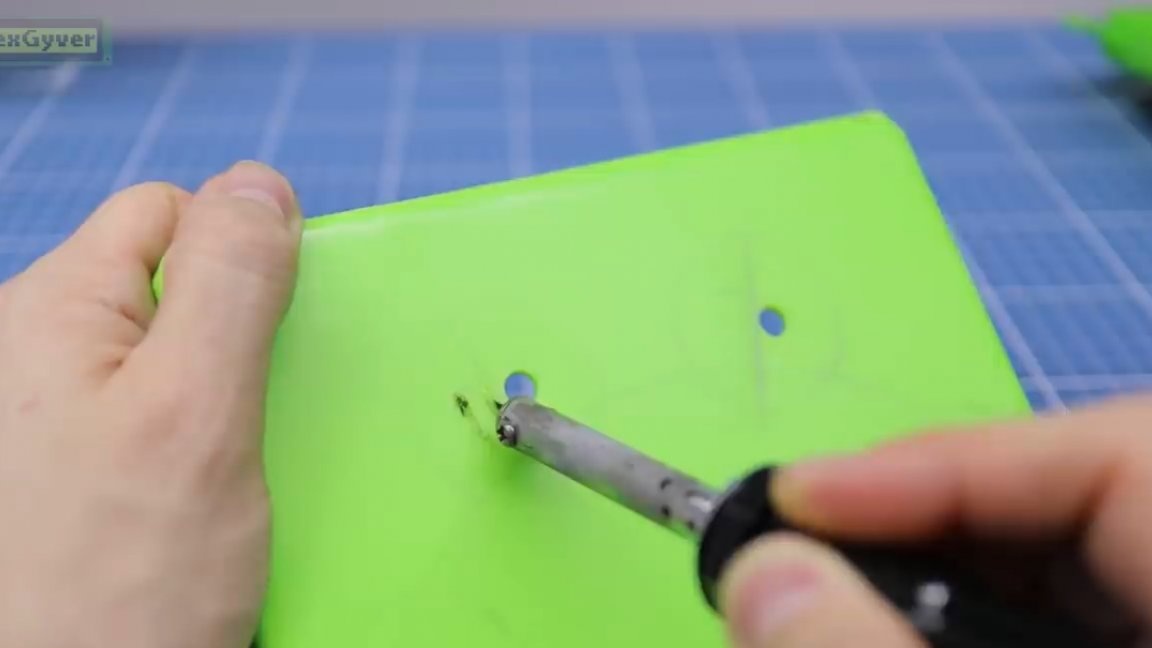
Gumamit ng isang fixingpray na paghihinang iron na may isang stitched tip, maaari mong i-cut ang plastik tulad ng mantikilya.

Ngayon ay inilalagay namin ang mga pindutan at i-fasten gamit ang isang mainit na baril na pandikit.
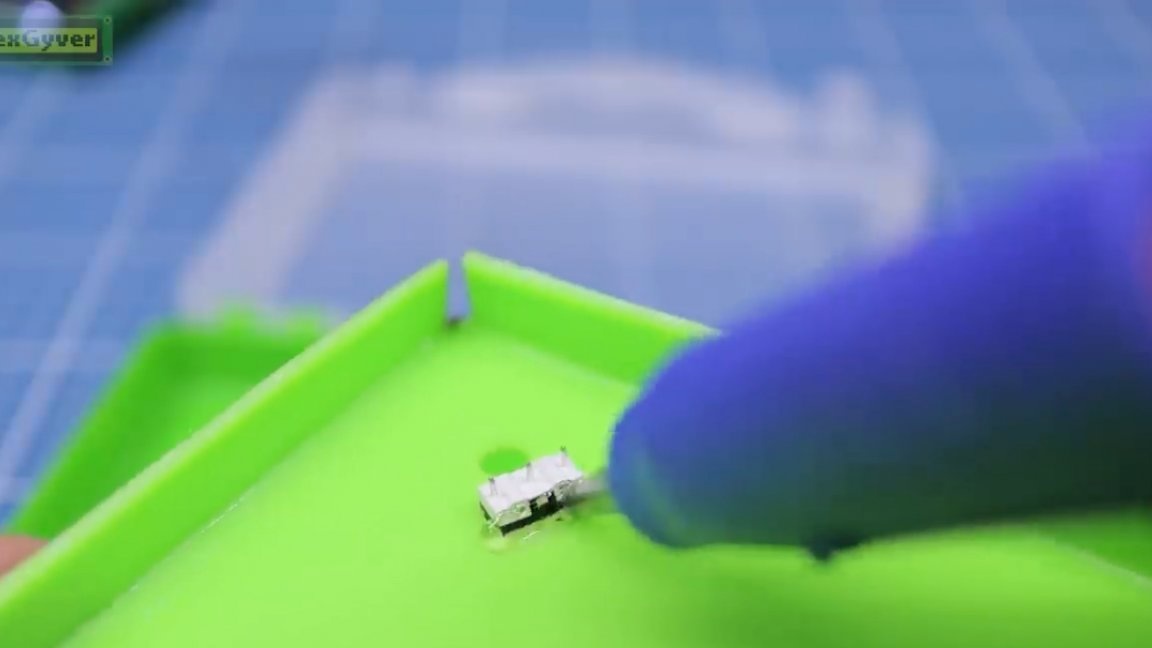
Susunod, magpatuloy sa paghihinang. Marami kang magbenta. Nagsisimula kami sa mga LED at pindutan. Ang mga LED, sa pamamagitan ng paraan, ay dapat na puno ng mainit na pandikit at sa itaas, upang makakuha ng isang uri ng diffuser.

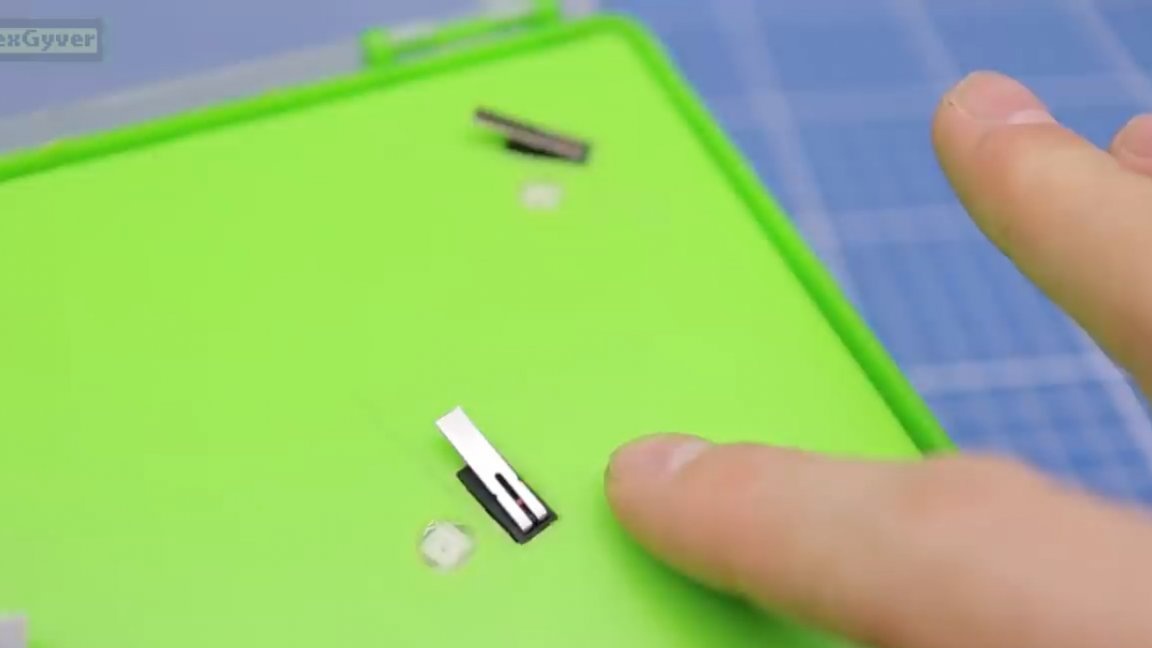
Muli ang template, drill, burn, at itakda ang lahat sa lugar nito.

Susunod, kailangan mong ayusin ang tubo sa bomba. Upang gawin ito, maaari mong painitin ang tubo sa mainit na tubig o gumamit ng mas magaan. Pagkatapos ang bomba ay nakadikit sa isang window na espesyal na pinutol para dito, at mula sa itaas ay natatakpan ito ng isang semicircular na kalasag na gawa sa parehong plastik.

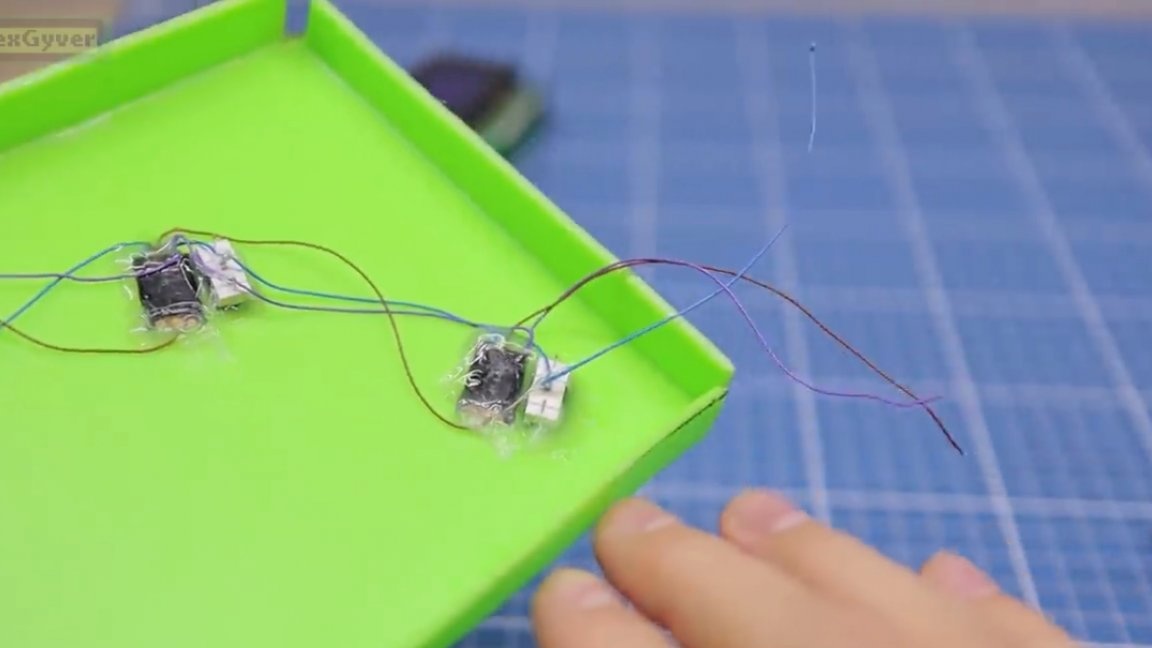
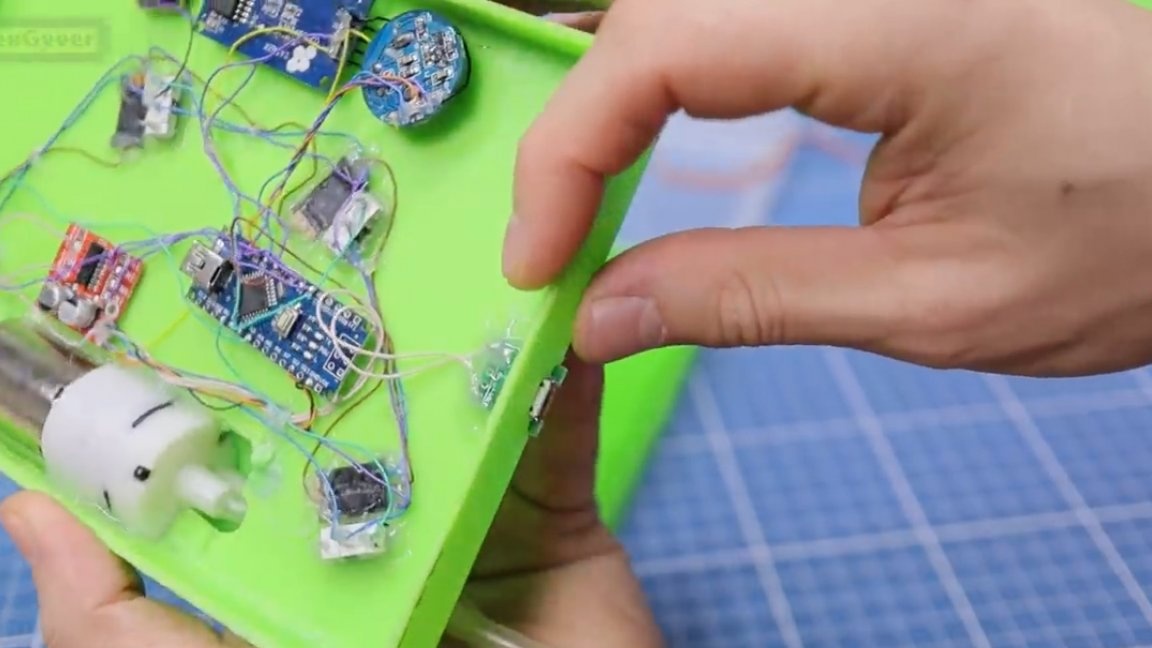
Susunod, simpleng ibinebenta namin ang lahat ayon sa pamamaraan.
Matatagpuan ang servo sa tuktok ng takip ng maleta. Gumamit ang may-akda ng mga rack para sa nakalimbag na circuit board para sa ito, at maaari mo itong ayusin nang may mahabang mga screws na M3.
Susunod, inilalabas namin ang USB socket sa pamamagitan ng butas na ginawa sa plastic.
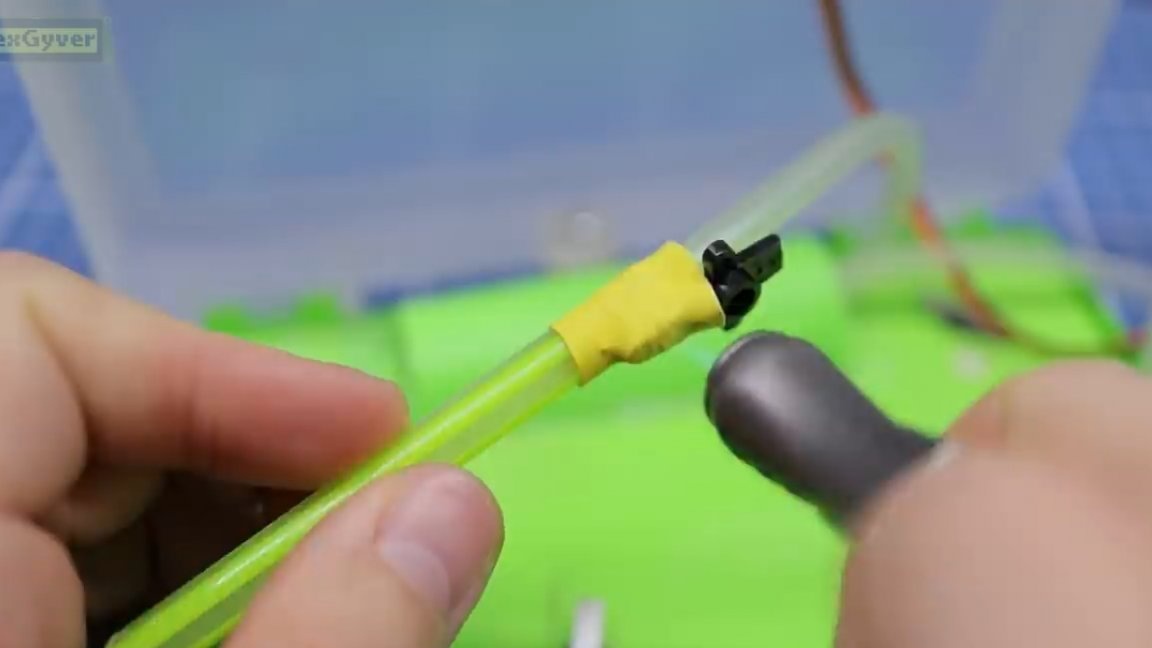
Ngayon gumawa ng isang gripo:

Itinaas namin ang aming tubo sa rocker ng servo-drive sa mga pinakamahusay na paraan na kilala sa sangkatauhan: mga thread at superglue.
Upang hindi magmukhang isang "kolektibong bukid", gagamitin namin ang pag-urong ng init.
Well, iba pang bagay! Ito ay nananatiling gawin ang pag-aayos ng takip sa tulong ng isang sulok at isang magnet na nakadikit sa superglue. Gumagana ito nang walang kamali-mali, mukhang technically at sa pangkalahatan medyo maginhawa.

Naisip namin ang bakal, nananatili itong mai-load ang firmware sa Arduino.
I-download ang archive. Gayundin, ang archive na may kinakailangang software ay magagamit sa pahina ng proyekto.
Doon mo rin mahahanap ang detalyadong mga tagubilin para sa pag-download ng firmware. Sa katunayan, ang lahat ay simple doon. Kailangan mong i-install ang programa, ikonekta ang Arduino nano board sa computer, buksan ang file ng firmware, ipahiwatig ang iyong bilang ng mga baso (mula 1 hanggang 6), at i-click ang pindutan ng pag-download.
Susunod, magpatuloy sa pagkakalibrate. Upang gawin ito, hawakan ang malaking pindutan at i-on ang system. Ang linya na "serbisyo" ay tatakbo sa pamamagitan ng pagpapakita, na nangangahulugang ang sistema ay nasa mode ng serbisyo.

Pinapayagan ka ng mode ng serbisyo na mano-manong iikot ang gripo, habang ang anggulo ng pag-ikot ay ipapakita.
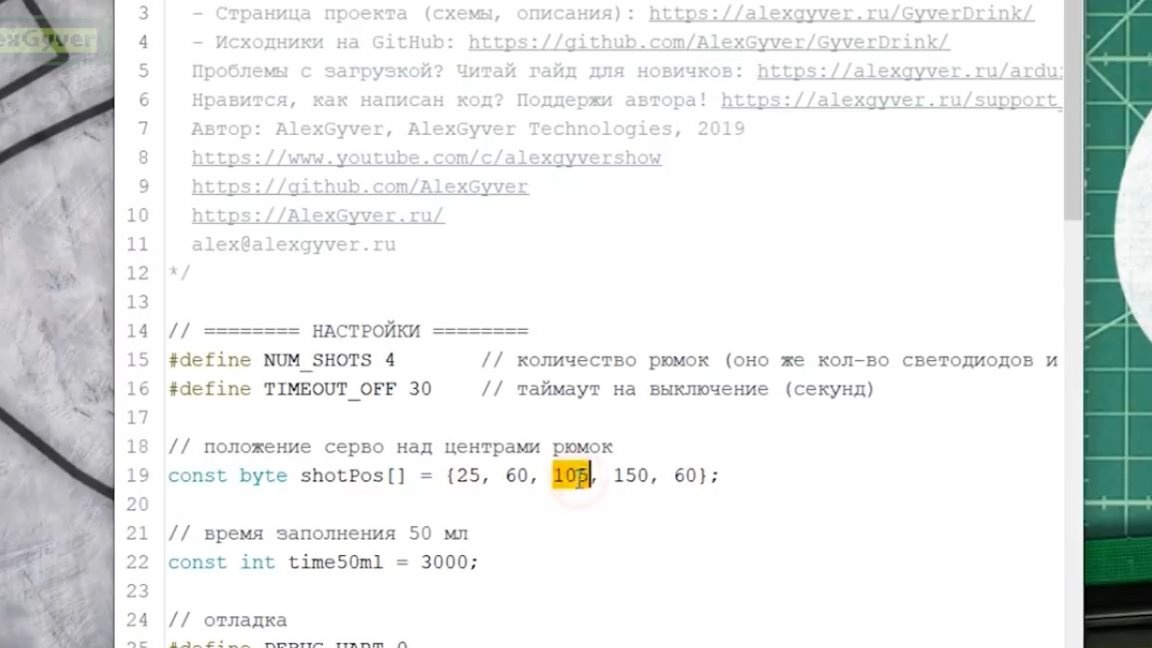
Ngayon ay kailangan mong magmaneho ng gripo sa lahat ng mga baso at tandaan ang anggulo para sa bawat isa.

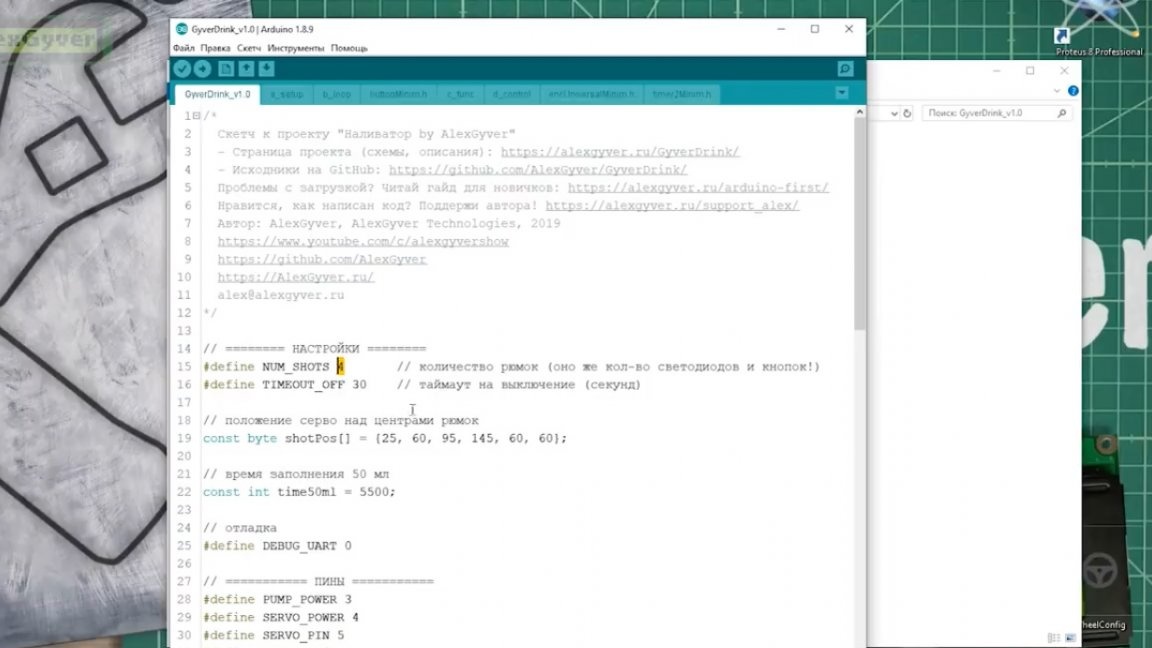
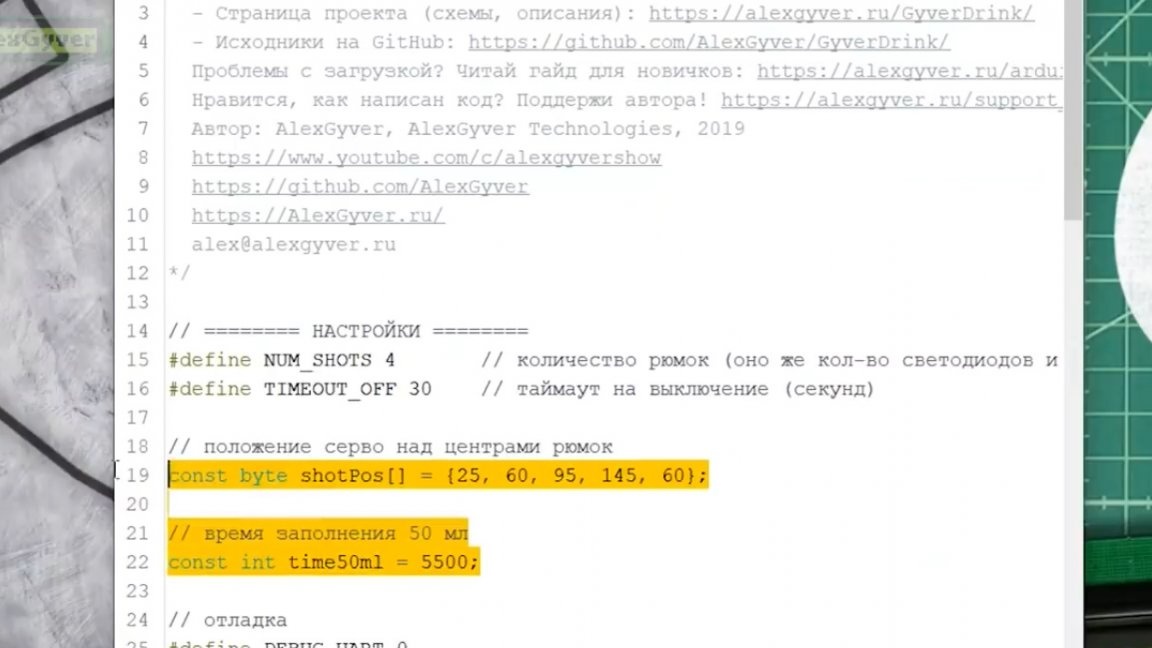
Ang nakuha na mga halaga ng mga anggulo ay kailangang maipasok sa firmware mismo, sa pagkakasunud-sunod mula sa zero:
Susunod, kailangan nating ibuhos nang eksakto sa 50 ML ng likido at malaman ang oras kung saan naganap ang pamamaraang ito.
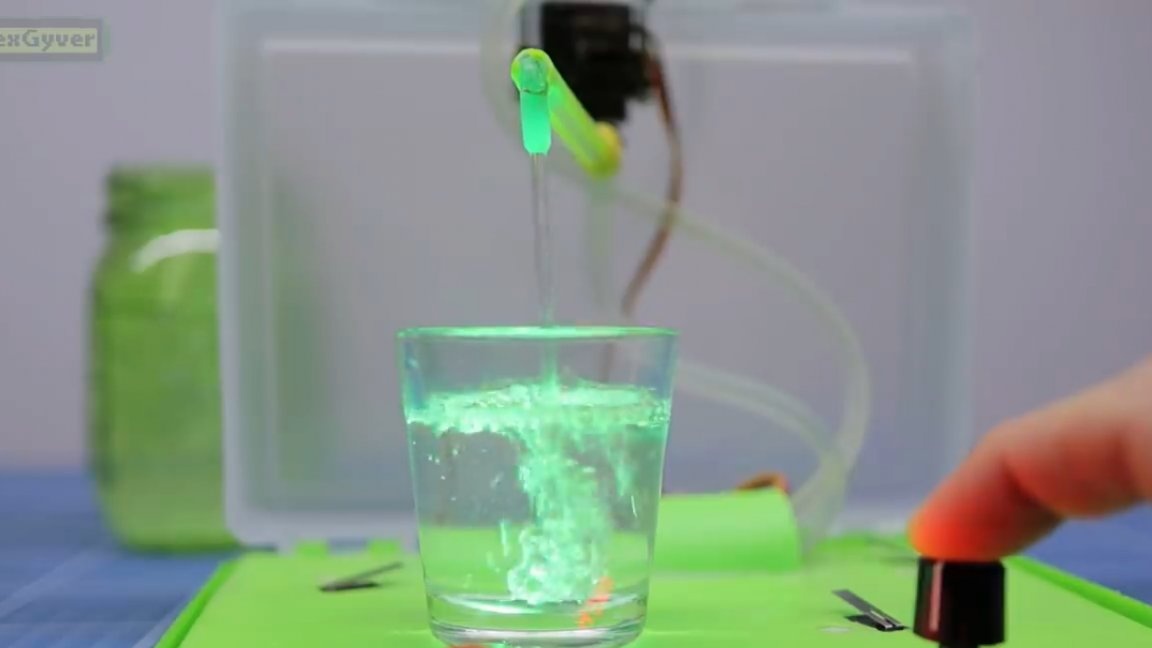
5.5 segundo. Ang nagresultang bilang ay ipinasok dito, ang mga ito ay mga millisecond:
Natapos ang pagkakalibrate. I-download ang calibrated firmware sa system.
Kaya kung paano gamitin ito. Binubuksan namin, nagdadala ng tubig at habang hawak ang pindutan ng encoder, hinihimok namin ang tubig sa pamamagitan ng tubo.
Sa ngayon, ang aming system ay nasa manu-manong mode, ang letrang R. Iyon ay, inilalagay namin ang mga tasa, ayusin ang dami at pindutin ang pindutan. Susunod, ang tagapuno ay gumagawa ng trabaho nito.

Matapos punan ang baso, ang apparatus ay naghahanap para sa mga walang laman na baso, at pinupuno din ito, kahit na naihatid sila bago matapos ang pagbuhos ng siklo.
Mayroon ding pangalawang mode - awtomatiko, upang lumipat kailangan mong hawakan ang malaking pindutan. Sa mode na ito, agad na ibinubuhos ng system ang likido sa bawat naihatid na baso.

Iyon lang. Salamat sa iyong pansin. Makita ka agad!
Video ng may-akda: