

Pagbati ang mga naninirahan sa aming site!
Sa oras na ito AlexGyver, ang may-akda ng YouTube channel ng parehong pangalan, tungkol sa holiday, na, sa paraan, hindi namin talaga nais, nagpasya na ulitin Proyekto ng Adafruit - isang mata ng bionic na nakapasok sa baso ng isang welder ng gas.

Mula sa punto ng view ng code, ang natapos na proyekto na ito ay ganap na hindi kawili-wili, ang may-akda ay interesado sa mekanismo, lalo, ang coordinate system nito.
Babalik tayo rito, ngunit sa isang iglap, ngunit una, kolektahin natin ang lahat ng mga mekanika at ikonekta ang lahat electronic mga sangkap.
Upang ulitin ang proyektong ito kakailanganin mo:
1) Gas salamin sa salamin. Maaari mong gamitin ang parehong metal at plastik.

Ang plastik ay tiyak na mas mahusay, ngunit siyempre hindi sila maaaring magyabang ng kalidad. Partikular, sa pagkakataong ito, na gawa sa plastik, ang mga gilid ay literal na bumagsak kaagad at kinakailangang kolain ng may-akda.

Ang ganitong mga baso ay maaaring mabili sa tindahan ng mga tool na nagbebenta o mga materyales sa gusali. Binili ito ng may-akda sa tindahan ng All Instruments.
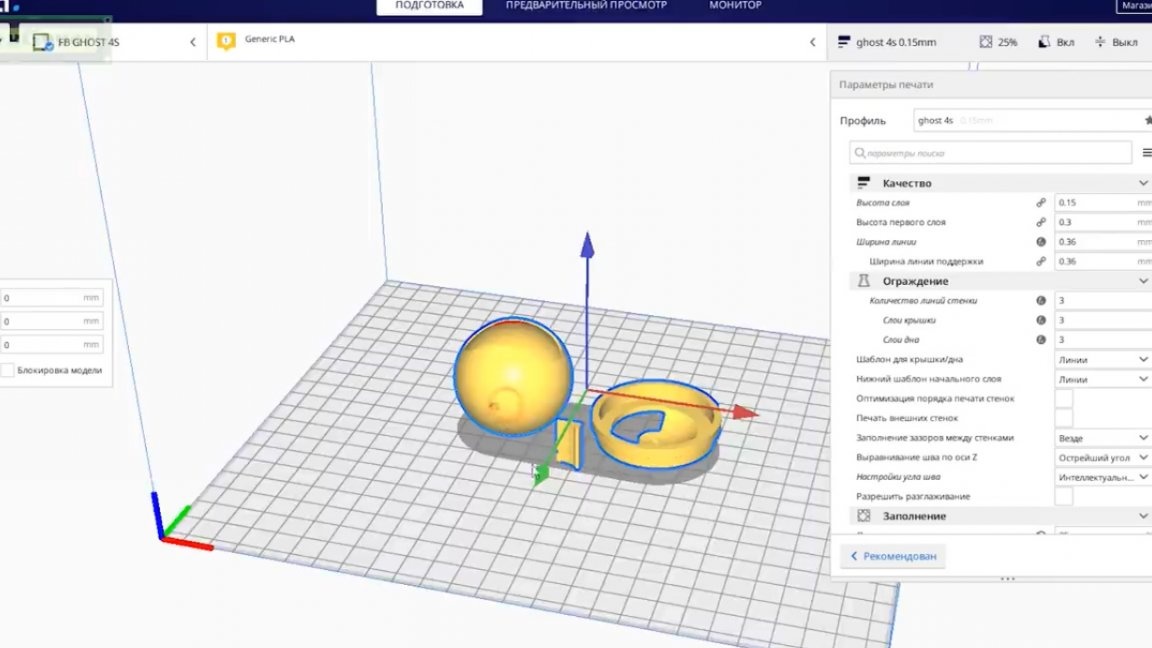
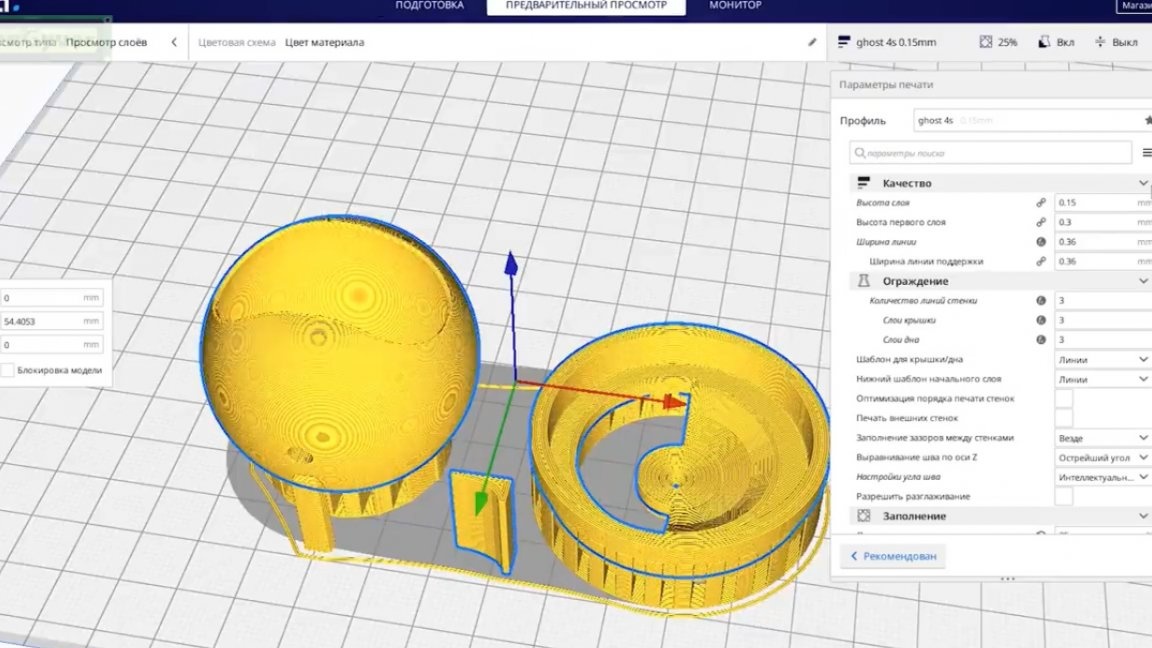
2) Susunod na kailangan namin ang mga naka-print na ito 3D printer ekstrang bahagi.
Ang may-akda ay naka-print ang mga elemento na may puting PLA plastic sa bagong 32-bit na lumilipad na ghost 4s 3D printer. File naglalaman ng lahat ng 3 mga modelo nang sabay-sabay. Ang pag-print ay kinakailangan sa mga suporta.

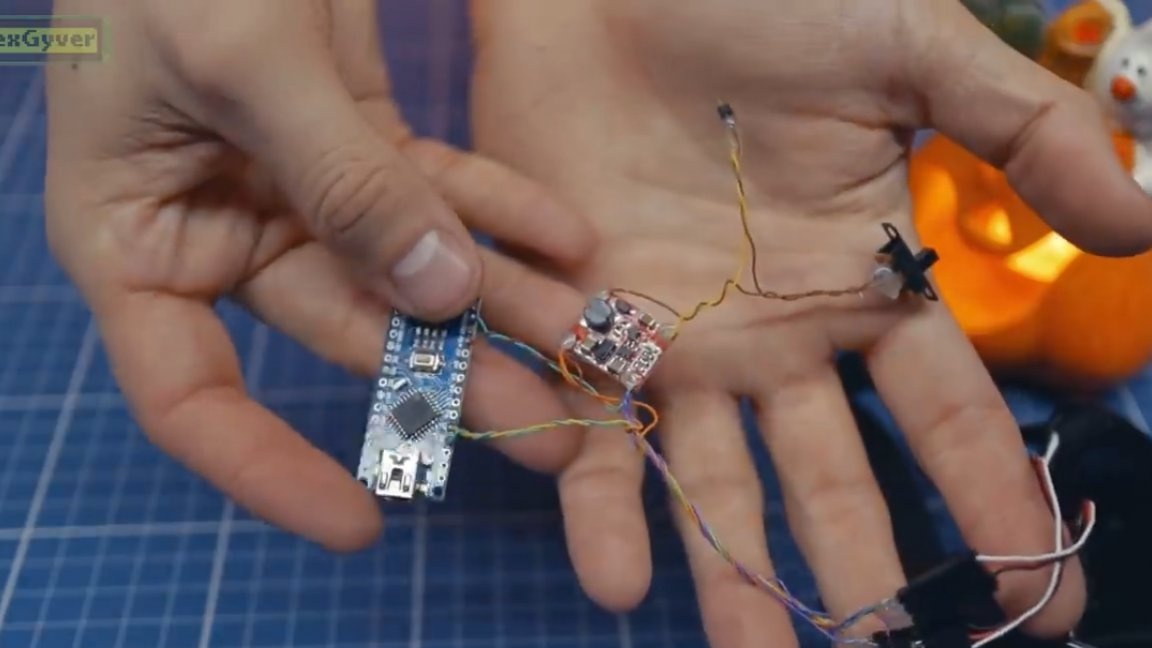
3) Ang susunod na sangkap na kinakailangan para sa aming espesyal na proyekto sa Halloween ay ang platform Mga Modelo ng Arduino Nano.

4) Kinakailangan din baterya ng lithium ion:
5) Palakasin ang dc-dc (hanggang sa 5V) converter;
6) Lumipat:

7) Micro servos, ngunit hindi karaniwang 9 gramo, ngunit mas kaunti:
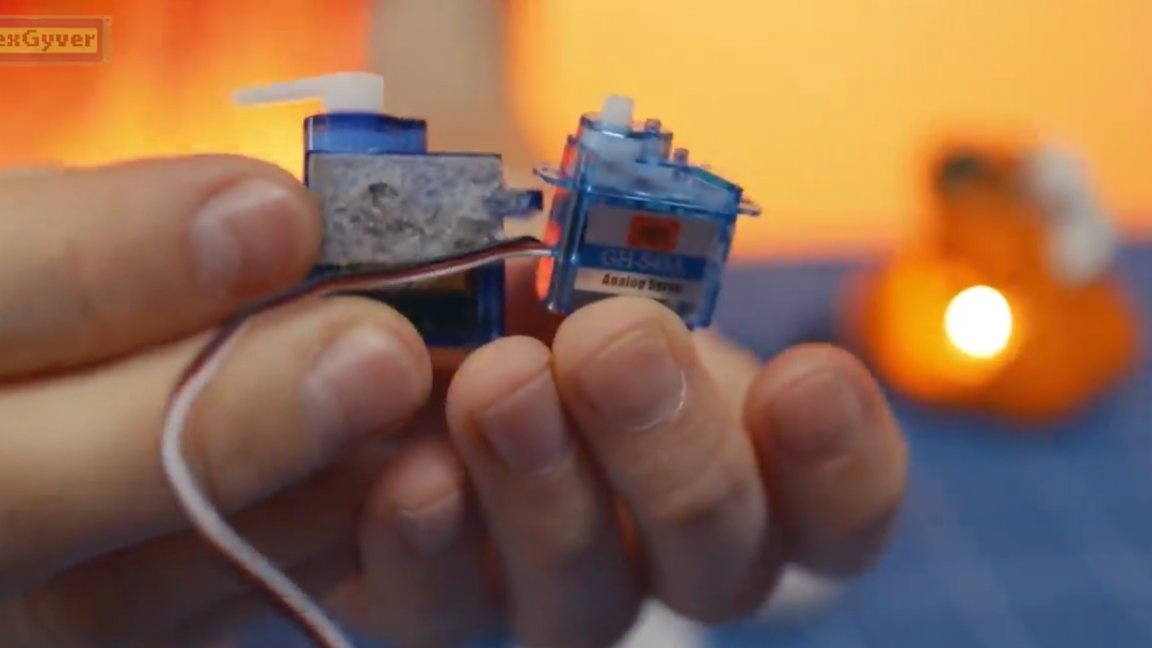
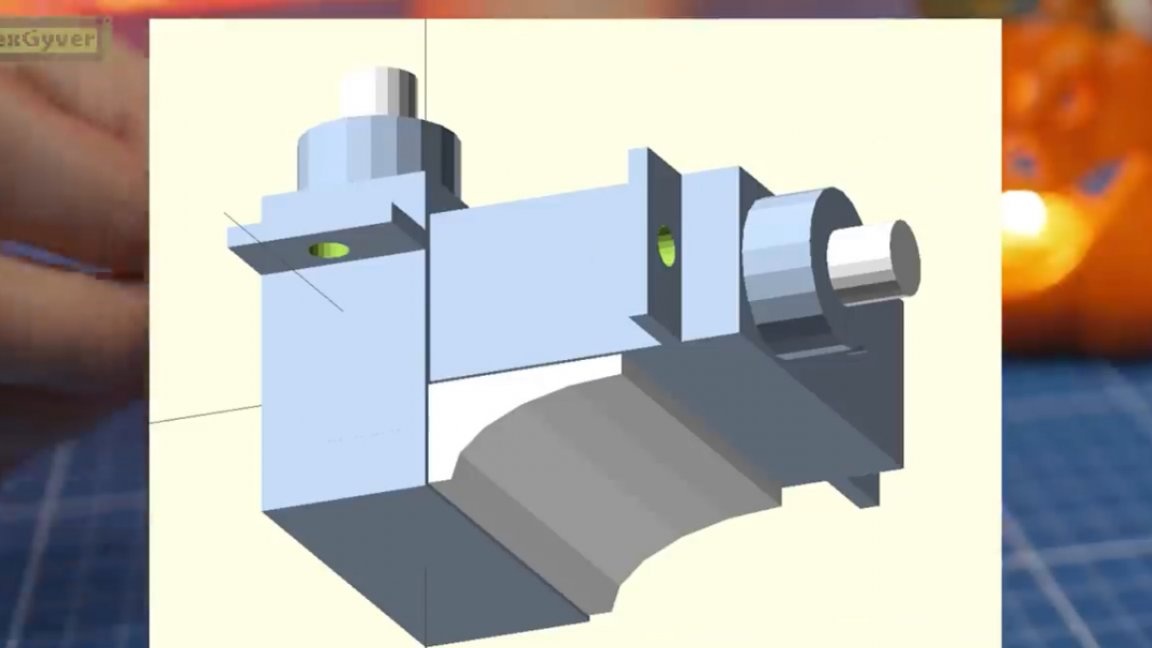
Kaya, sa mga kinakailangang sangkap, uri ng may korte, bumaba tayo upang tipunin ang aparato. Una, kailangan nating i-mount ang drive tulad ng mga sumusunod:
Narito ang isang mas maliwanag na larawan:
Inalis namin ang sticker, at sa tulong ng superglue ikinonekta namin ang buong bagay na ito.


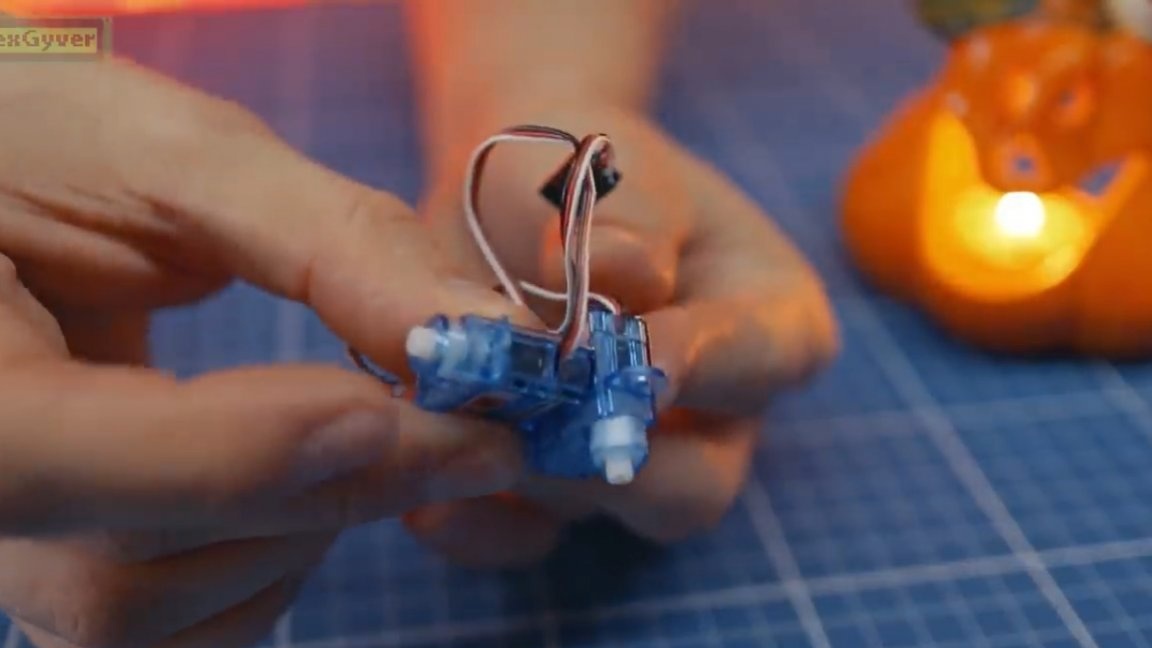
Sa pamamagitan ng paraan, ang mga Chinese servos ay tila medyo naiiba sa mga Adafruth, at kailangan mong ipako ang mga ito tulad nito, na may isang maliit na offset:
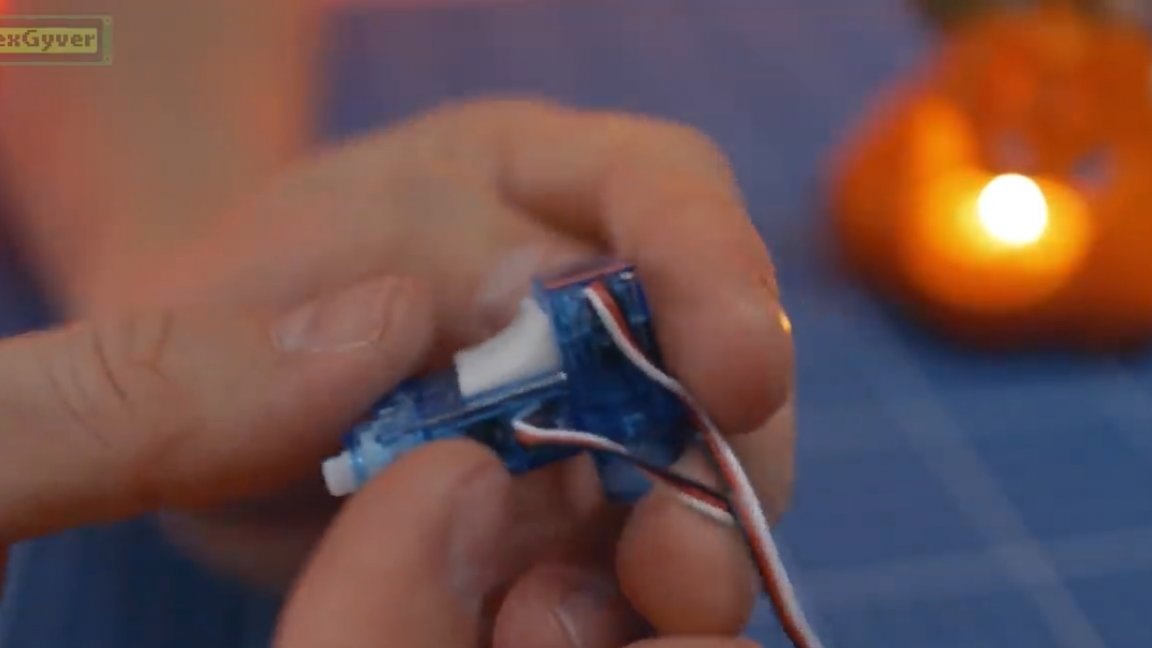
Dapat alisin ang mga tainga, makagambala sila.
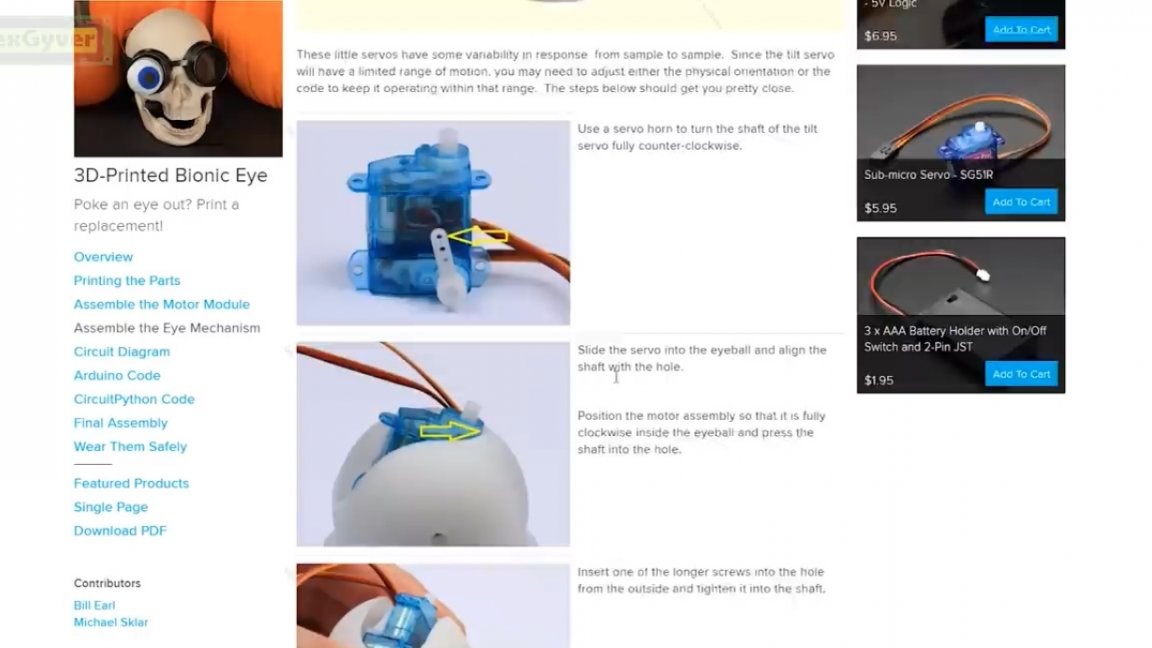
Pagkatapos ay sa mas mababang pagmaneho, ikinakabit namin ang rocker at pinihit ang shaft counterclockwise.

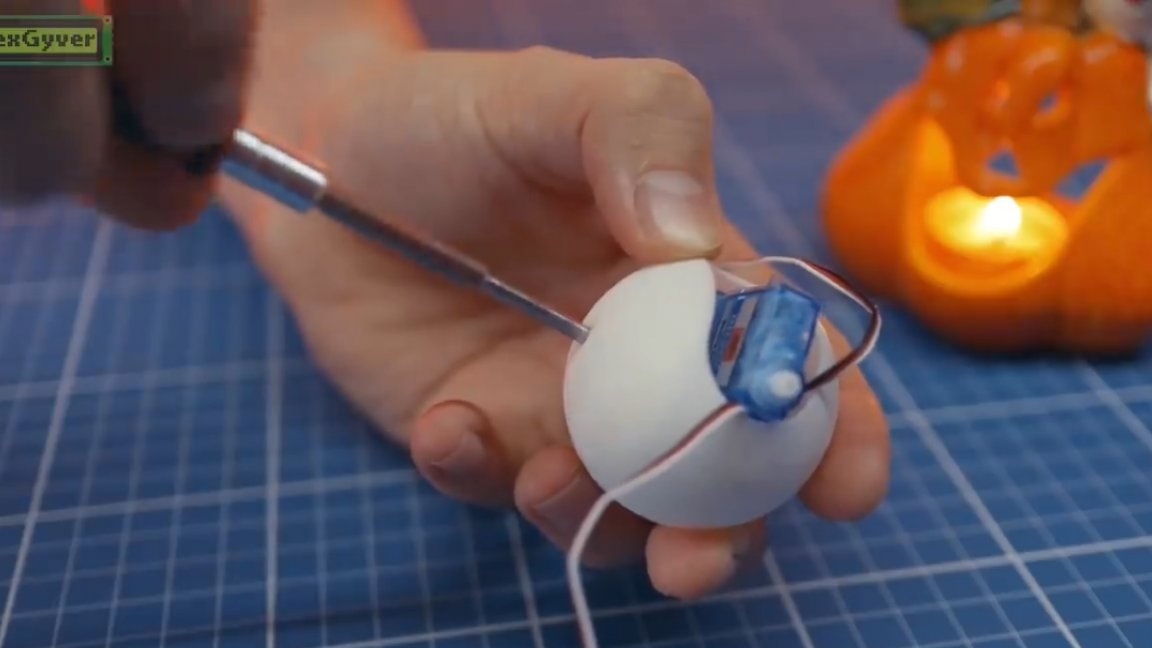
Ipasok ang servos sa pre-print sa 3D printer blangko (mata).
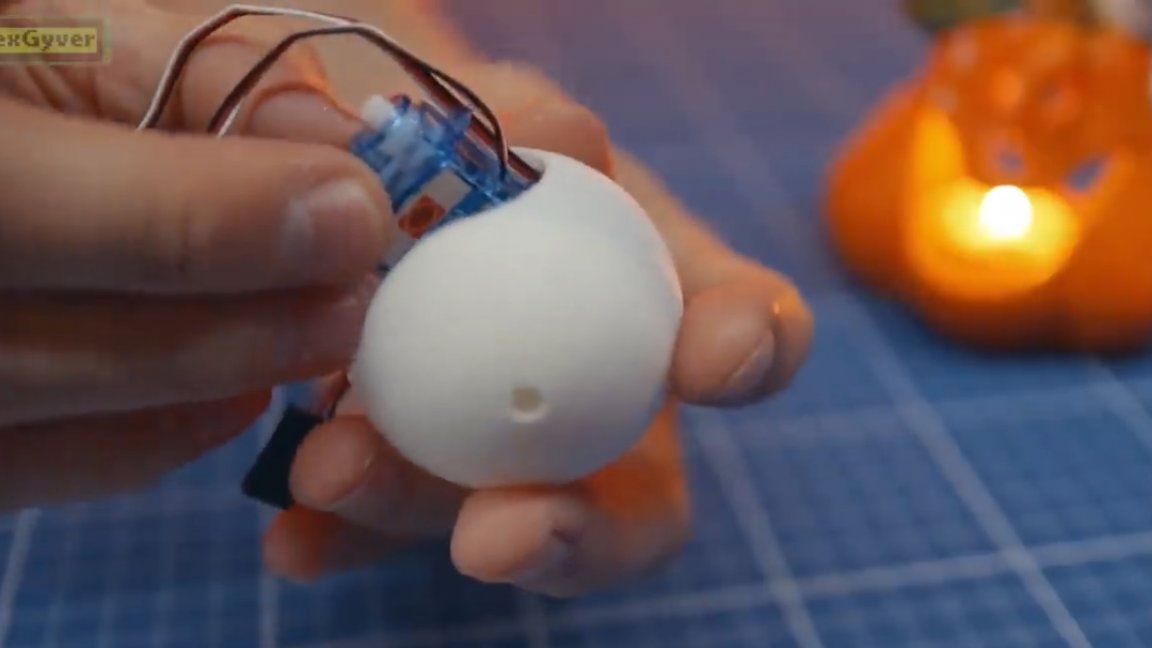
Dumating kami sa nakausli na drive sa pinakadulo, at ipasok ang output shaft sa butas sa loob ng mata.

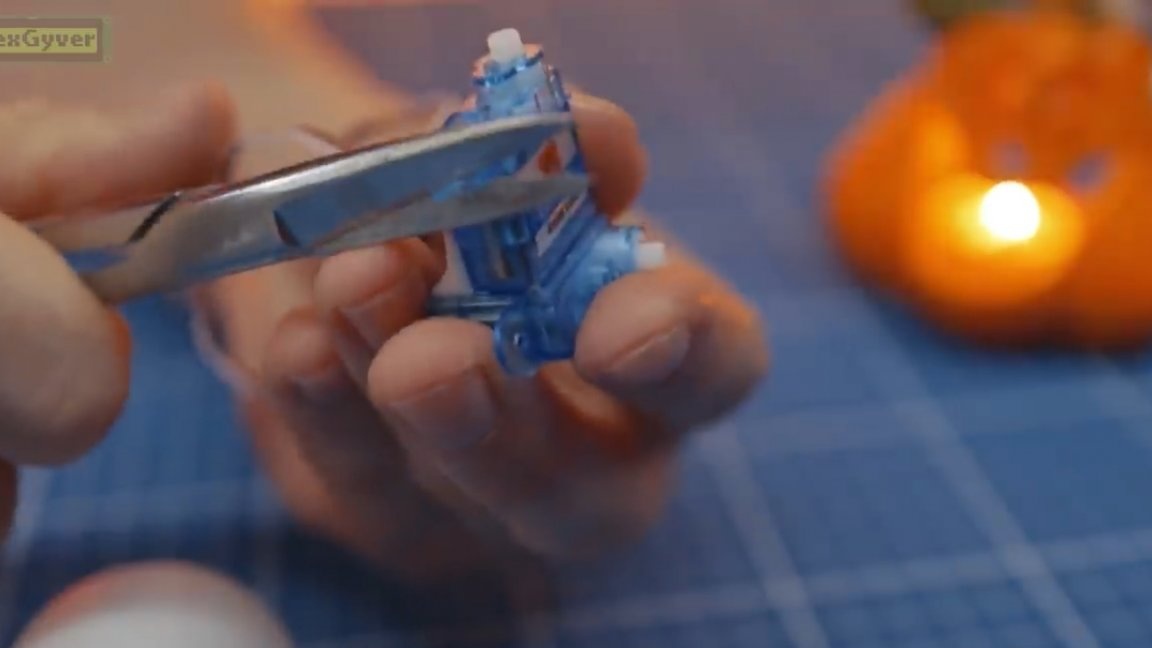
Ang mahabang kumpletong tornilyo ay kailangang maikli. Magagawa ito gamit ang nippers.

Pagkatapos, gamit ang isang pinaikling tornilyo, inaayos namin ang panloob na drive.
Kung mayroon kang isang servo tester, maaari mong i-verify ang pagpapatakbo ng nagresultang mekanismo.
Pagkatapos ay ikinakabit namin ang pangalawang bahagi ng mata sa baras ng pangalawang drive at i-fasten din ito.

Kami ay kumbinsido sa pangkalahatang pagganap (dapat magtulungan).


Lalo na para sa proyektong ito, nagsulat ang may-akda ng isang simpleng code na maayos na nagpapaikot ng mga drive sa isang random na anggulo. Ngunit ang gitna ng mata ay bahagyang bias, kaya't nakita namin ang aktwal na sentro at iguhit ang mag-aaral.

Sa gayon, dahil ito ay isang proyekto ng holiday, at ang pista opisyal ay tiyak na, pagkatapos ay gawin itong medyo mas kahila-hilakbot.

Susunod, ipasok ang nagresultang bahagi sa baso.

Kung hindi ito ipinasok, kinakailangan na mag-chamfer nang kaunti.

Pagkatapos ay pinagsama namin ang lahat.


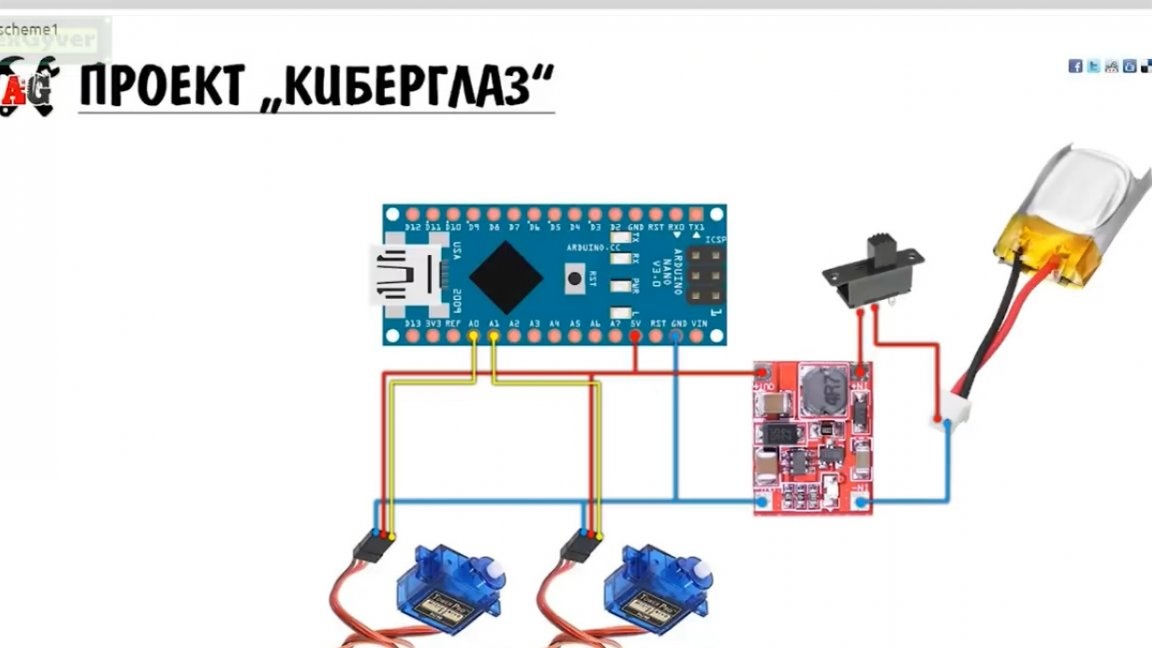
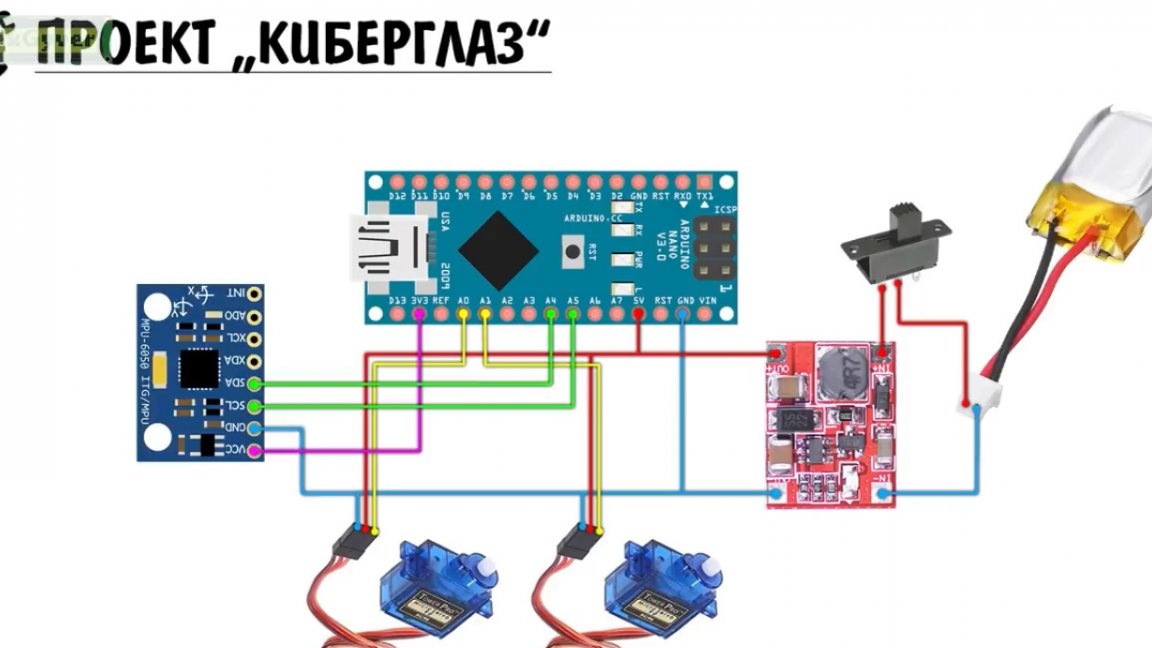
Susunod, ikinonekta namin ang lahat ng mga sangkap ayon sa sumusunod na pamamaraan:
Handa na ang lahat, ngunit mayroon kaming bawat biyahe lamang tumataas sa isang random na anggulo, at sa prinsipyo maaari mong iwanan ito tulad ng.

Ngunit tandaan sa simula ng artikulo ay nabanggit tungkol sa mekanismo at coordinate system? Kaya, ang mekanismo ay umiikot sa dalawang axes, ngunit hindi kasama ng mga kasama kung saan ang mata ng tao ay umiikot. Ang aming layunin ay upang gumawa ng tulad ng isang mekanismo na kumilos na katulad ng mata ng tao. Sa unang sulyap ay tila imposible ito, ngunit maaari mong subukang dalhin ang normal na sistema ng coordinate nito upang mailagay mo ang mag-aaral sa anumang nais na posisyon.
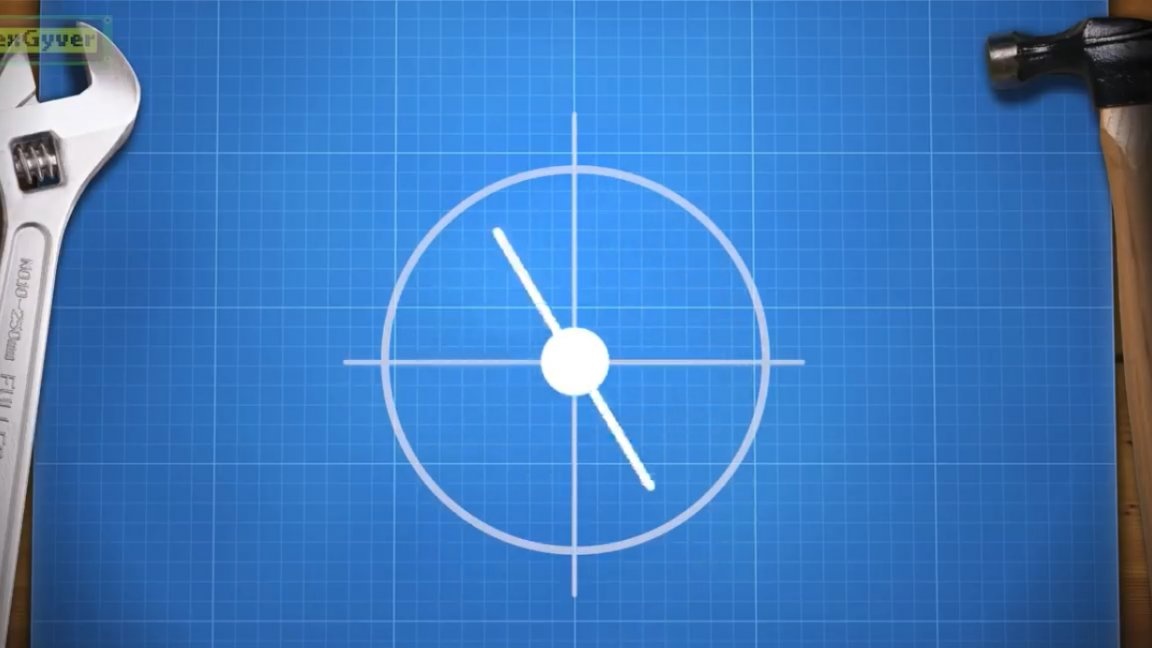
Kaya, mayroon kaming dalawang anggulo, ipinapahiwatig namin sila X at Y.

Y ang maliit na anggulo ng mata, at ang X ay ang anggulo ng pag-ikot ng mata sa pamamagitan ng 180 degree.
Upang makamit ang lahat ng posibleng mga posisyon kinakailangan upang makontrol ang parehong mga anggulo, at mayroong isang tiyak. Magsimula tayo sa pinakasimpleng - pabilog na paggalaw na may pinakamataas na radius.
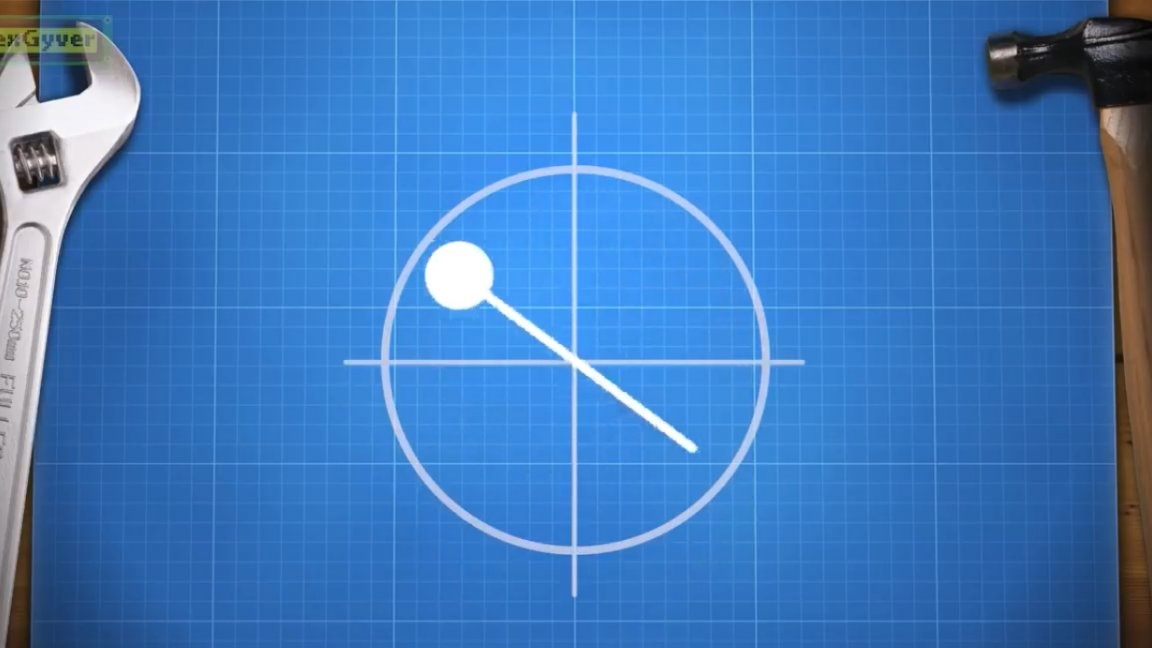
Ngunit hindi ito gaanong simple. Samakatuwid, ang unang bagay na ginawa ng may-akda ay isang polar coordinate system kung saan maaari mong itakda ang anggulo ng pag-ikot ng mata at radius, iyon ay, ang pag-alis ng mag-aaral mula sa gitnang punto 00.
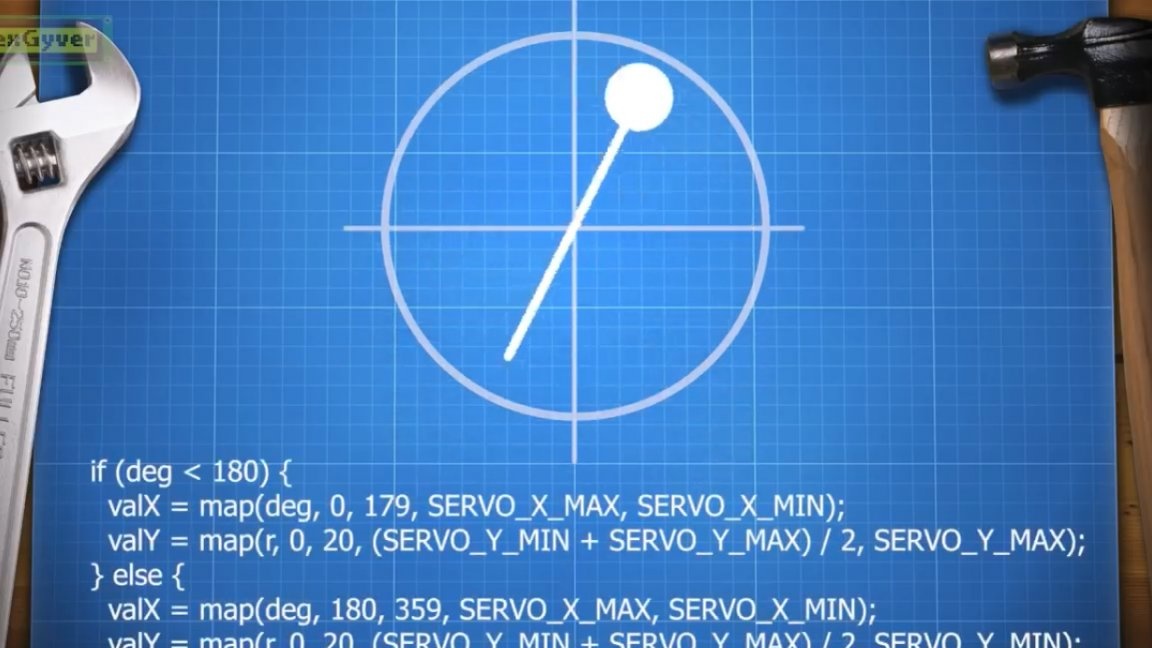

Sa itaas na semicircle, nagtatrabaho kami mula sa kalahati ng anggulo Y hanggang sa maximum na halaga nito, at sa mas mababang - mula sa minimum hanggang kalahati. Ngayon ang paggalaw ng mata ay maaaring ma-program sa isang mas kawili-wiling paraan. Ang mga paggalaw sa kanilang sarili ay random, ngunit nasa paligid ng circumference.


Ngayon, ibebenta natin ang lahat ng mga electronics, lahat ay tulad ng sa diagram:
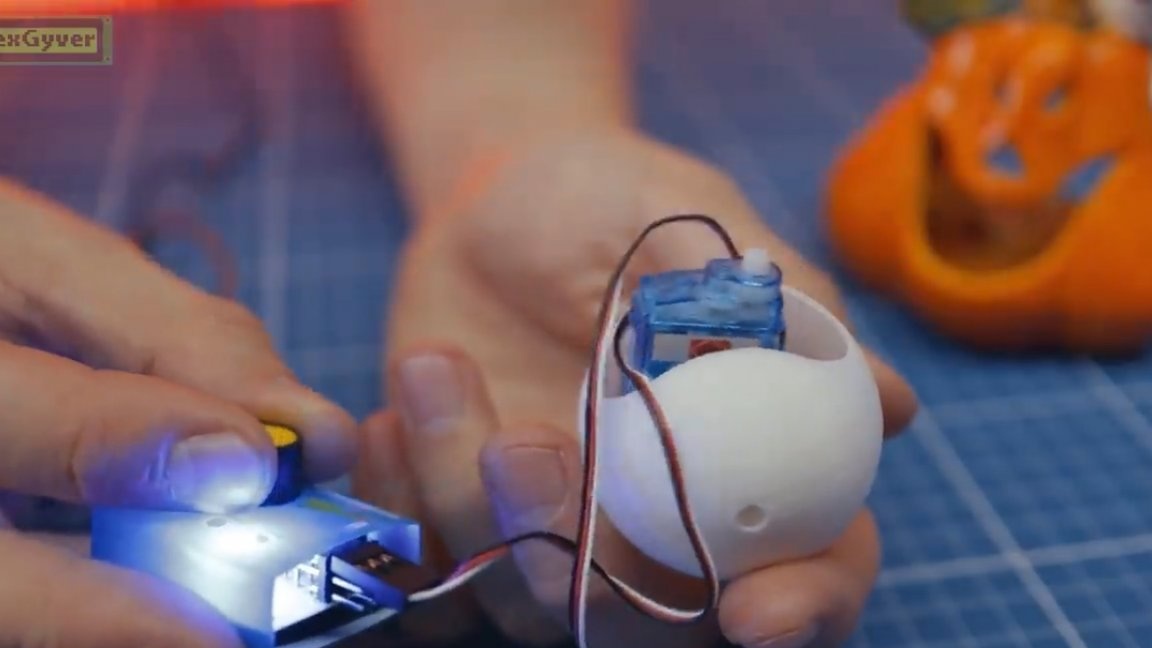
Sinusubukang i-on ito.
Ang indikasyon ay. Ngayon itinatago namin ang buong bagay na ito sa ilang uri ng gusali (sa kasong ito, ginamit ng may-akda ang isang kahon ng t-t-tac).

Ang lahat ng aming mga mata sa cyber ay handa na. Narito ang tulad ng isang biro.


Ngunit ipagpapatuloy pa rin natin ang aming teoretikal na pananaliksik at isalin ang polar coordinate system sa Cartesian, sa paglaon ay mauunawaan ko kung bakit.

Ang lahat ay simple dito, ang function ng atan2 ay makakatulong sa amin, na ibabalik ang anggulo sa mga radian mula –P hanggang P, at ang pagpapaandar ng hypot, na makakalkula ang haba ng hypotenuse sa parehong dalawang coordinates, at ang hypotenuse ay ang radius para sa aming nakaraang pag-andar.

At sa isang simpleng paraan, ang aming pang-eksperimentong paksa ay maaari na ngayong lumingon ang kanyang mata nang eksakto kung saan kailangan natin ito (pataas, pababa, kanan, kaliwa).

Kaya bakit ito kinakailangan? Ito ay kinakailangan upang magdagdag dyayroskopsa tulong ng kung saan ang mata ay lumiliko sa parehong direksyon ng ulo, na marahil ay mukhang mas nakakatawa. Sa totoo lang, idinagdag ang proyekto dyayroskop mpu6050, ganito ang hitsura sa diagram:
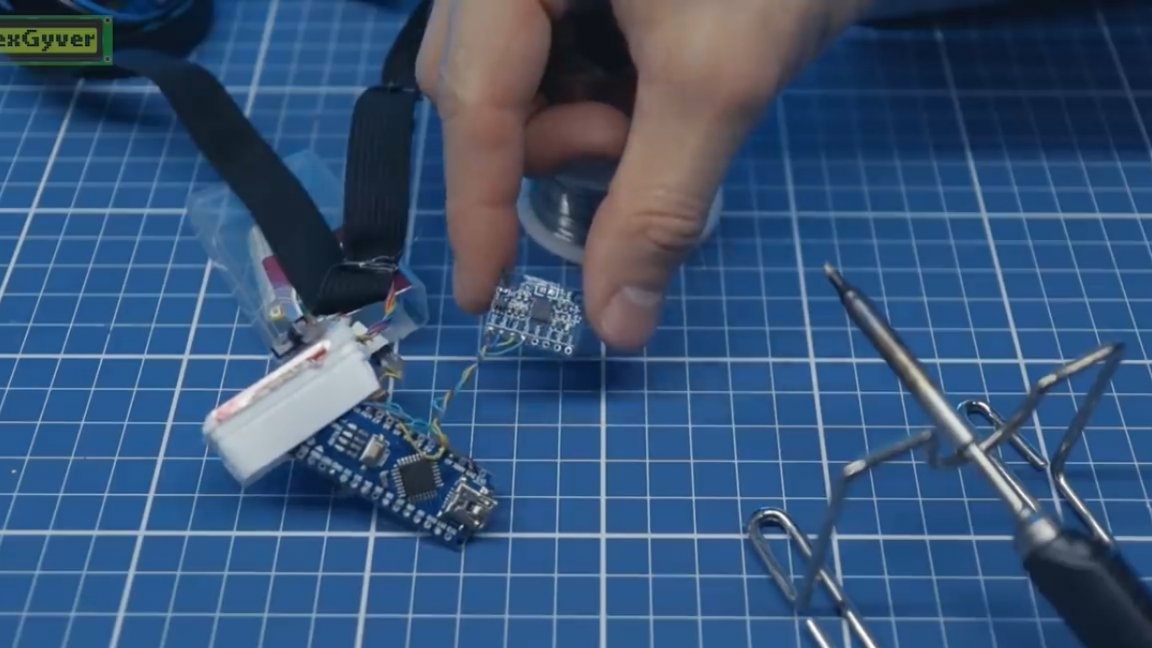
Baguhin ang code, siguraduhin na ang mga pagbabasa mula sa dyayroskop ay magpapahiya sa mata. Sa pamamagitan ng filter na natural.

Kaya ano ang makukuha natin sa huli? Ang mata ay medyo huli sa likod ng pagliko ng ulo, sa gayon ay lumilikha ng epekto na lumiliko ito ng tama at tumingin sa iyo. Bilang isang resulta, narito ang isang maliit na proyekto sa matematika.

Firmware DITO. Salamat sa iyong pansin. Makita ka agad!
Video ng may-akda: