Pinagsama ng panginoon ang makina ng paggiling na ito mula sa materyal na magagamit niya.
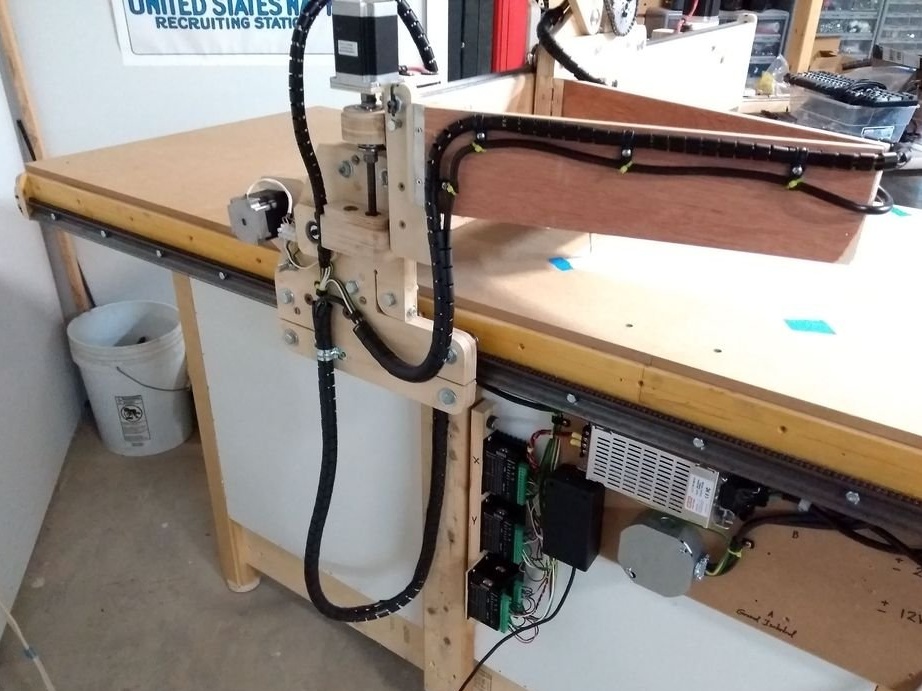
Ito ay isang klasikong three-axis milling machine. Mayroon itong isang portal na gumagalaw sa kahabaan ng haba ng base (Y axis). May isang karwahe kung saan naka-mount ang router, at gumagalaw ito pabalik (X axis). At mayroong isang mekanismo na itinaas at ibababa ang router pataas at pababa (Z axis). Para sa paggalaw, gumagamit ang master ng mga stepper motor at chain. Para sa mga linear na riles, ginagamit ang mga bearings ng bakal V na umaabot sa isang sulok ng bakal. Ang wizard ay hindi nagbibigay ng detalyadong mga tagubilin, tanging ang pangkalahatang konsepto at ideya.
Mga tool at materyales:
- Talahanayan ng Bedside;
-Door;
-Rollers;
-Metal na sulok;
-Pamilyar;
-Fastener;
-Drill;
Milling cutter;
-Saw;
-Wire;
-Chain;
-Nahawak na baras;
-Mga engine engine;
-Stars;
-Bearing;
-Adapter para sa isang vacuum cleaner;
-Arduino;
- Estilcam controller;
-Solid ng relay ng estado;
-Pagkaloob ng lakas;
Mga driver ngStep;
Hakbang Una: Ang Talahanayan
Ang master ay nag-redid ng talahanayan mula sa lumang nightstand. Bilang isang countertop, ipinako ng master ang isang kahoy na pinto sa mesa. Sa ibaba ay naka-install na mga roller.



Hakbang Dalawang: Mga daang-bakal
Gumagamit ang master ng isang metal na sulok bilang gabay. Sa blangko ng playwud, ang master ay nag-fasten ng apat na mga bearings na may isang uka. Malinaw na ang sulok ay nakadikit sa magkabilang panig ng mesa.




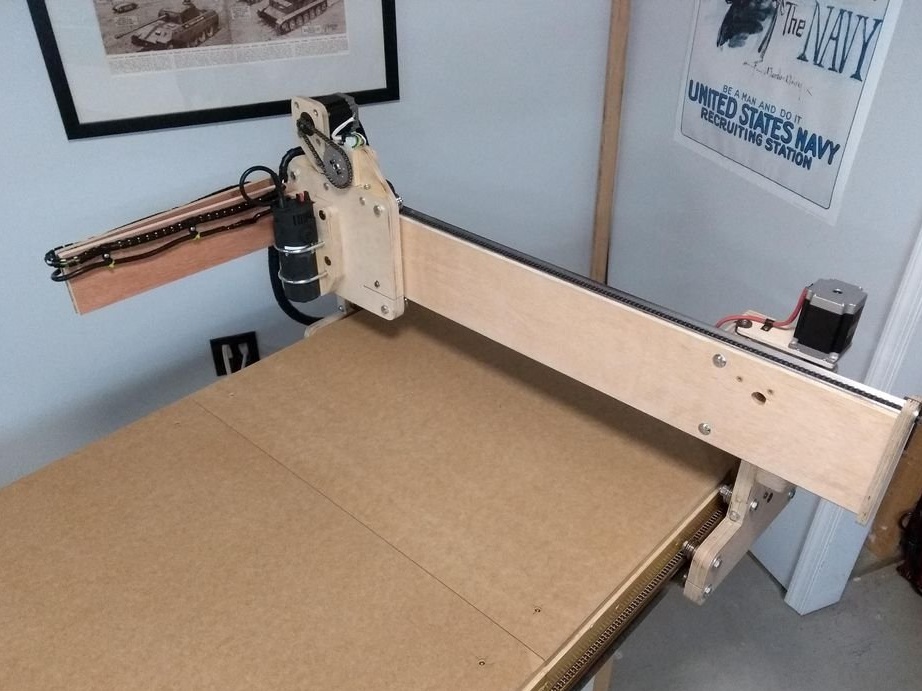
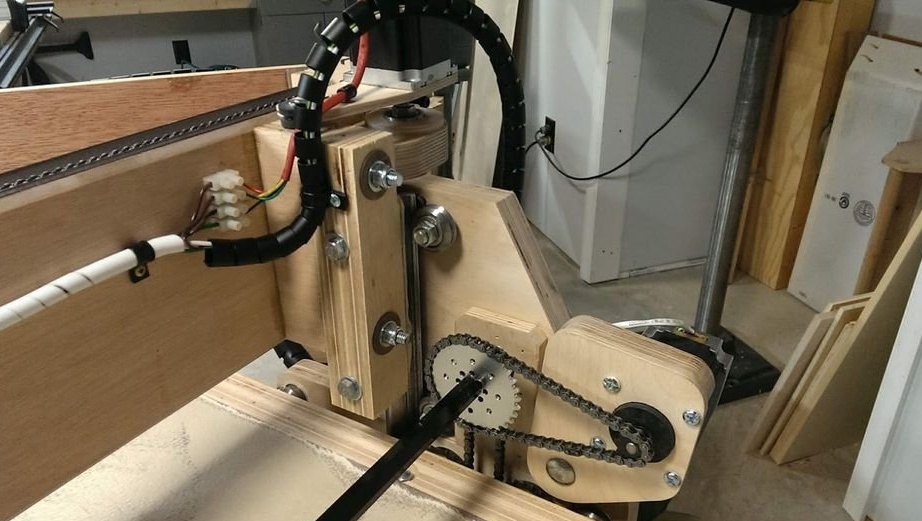
Hakbang Tatlong: Portal
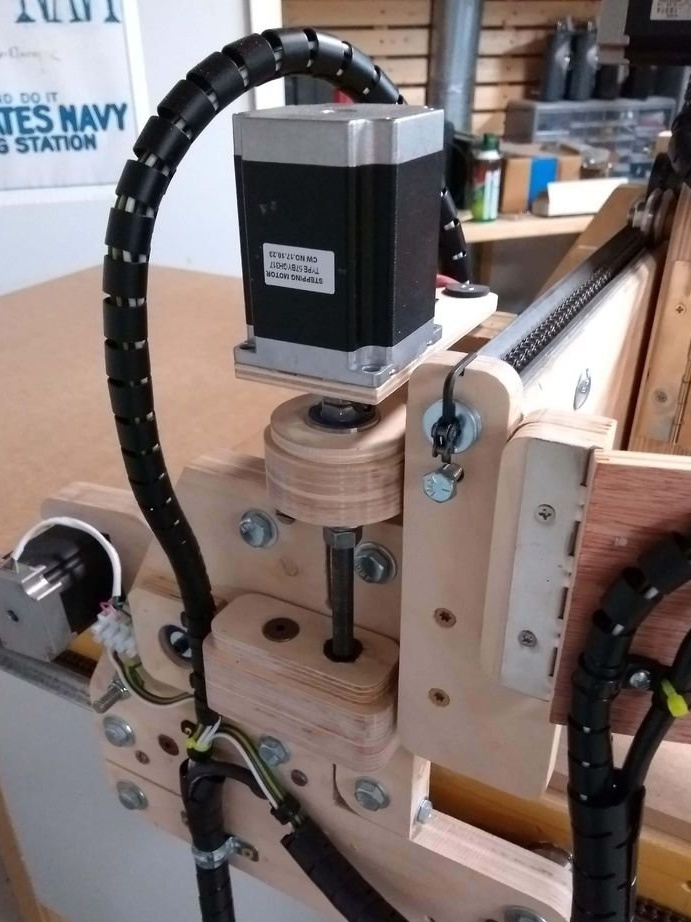
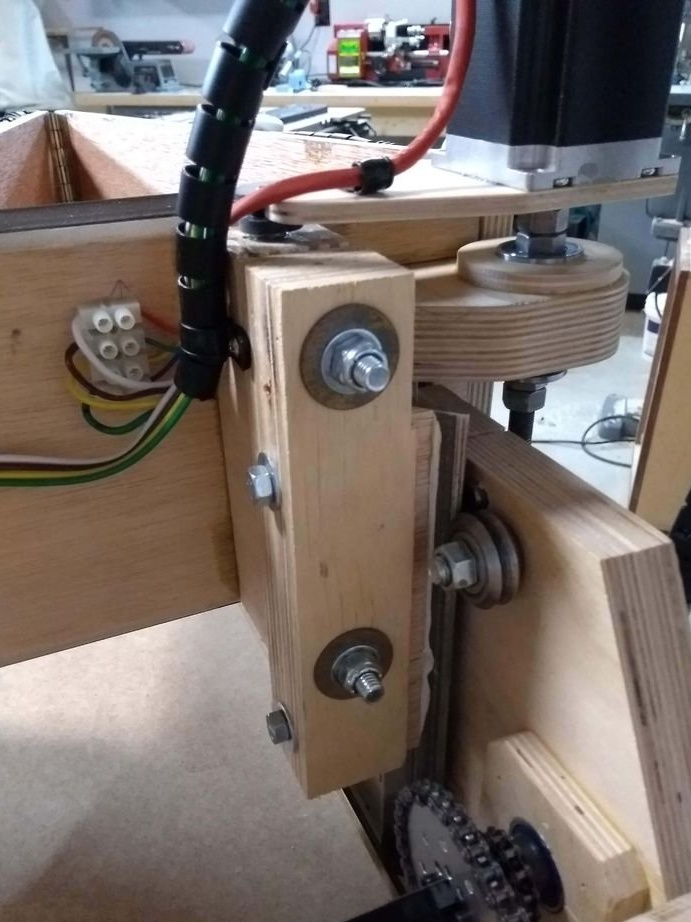
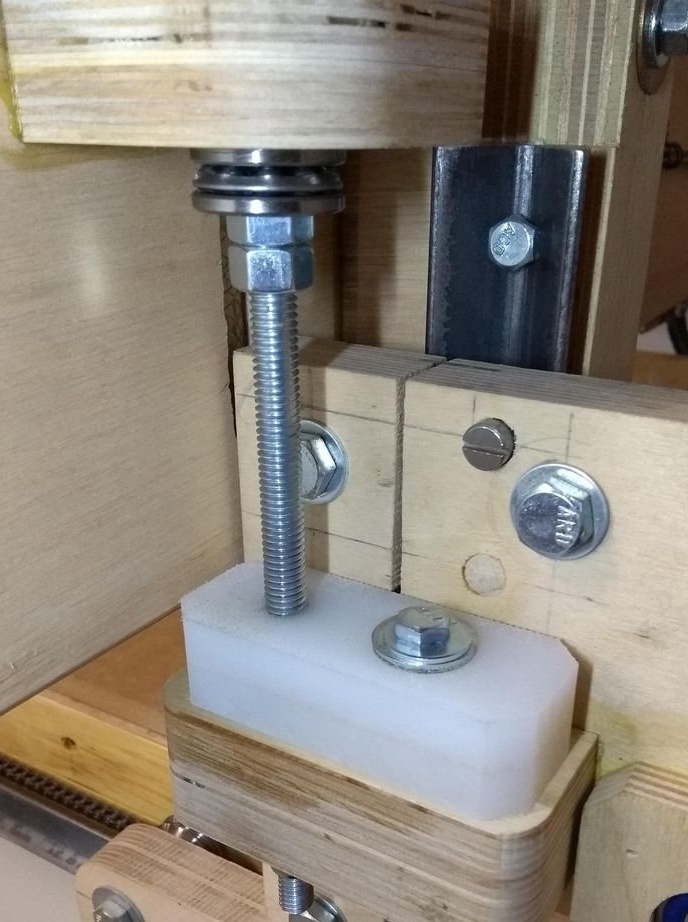
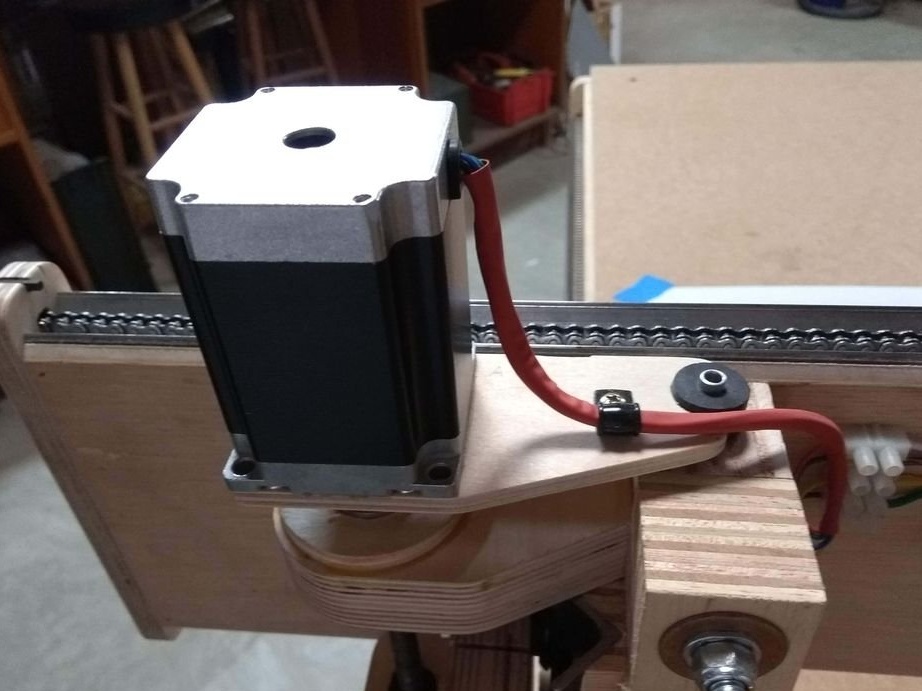
Ang portal ay binuo ng dalawang layer ng playwud na nakadikit nang magkasama. Ang isang paggupit ng paggiling ay naka-mount sa transverse detalye ng portal. Ang nakahalang bahagi, kasama ang pamutol ng paggiling, ay gumagalaw pataas / pababa kasama ang parehong riles tulad ng sa nakaraang hakbang. Ang dalawang motor na stepper ay naka-install upang ilipat sa mga gilid. Ang master ay na-secure ang mahabang bolts sa mga axes ng mga engine. Sa ilalim ay may isang buhol na may mga mani. Sa isang utos, ang mga makina ay nagsisimulang gumana, ang mga shaft ay umiikot, at ang paggiling ng pamutol ay nagpapababa o bumangon.
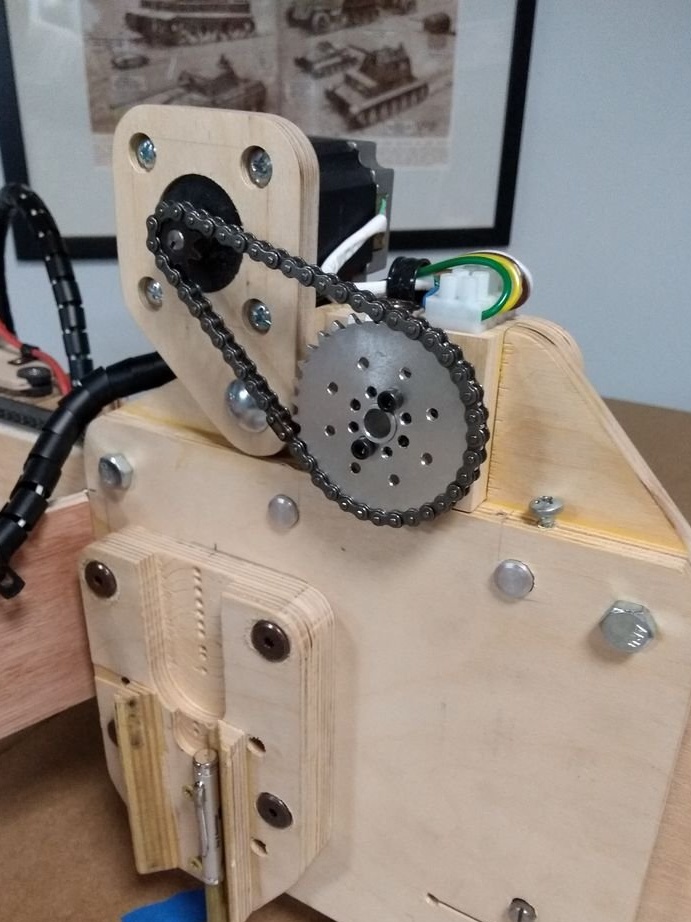
Upang ilipat ang karwahe gamit ang gilingan sa axis ng Z, ang master ay gumagamit ng isang motor ng stepper at isang kadena ng kadena.





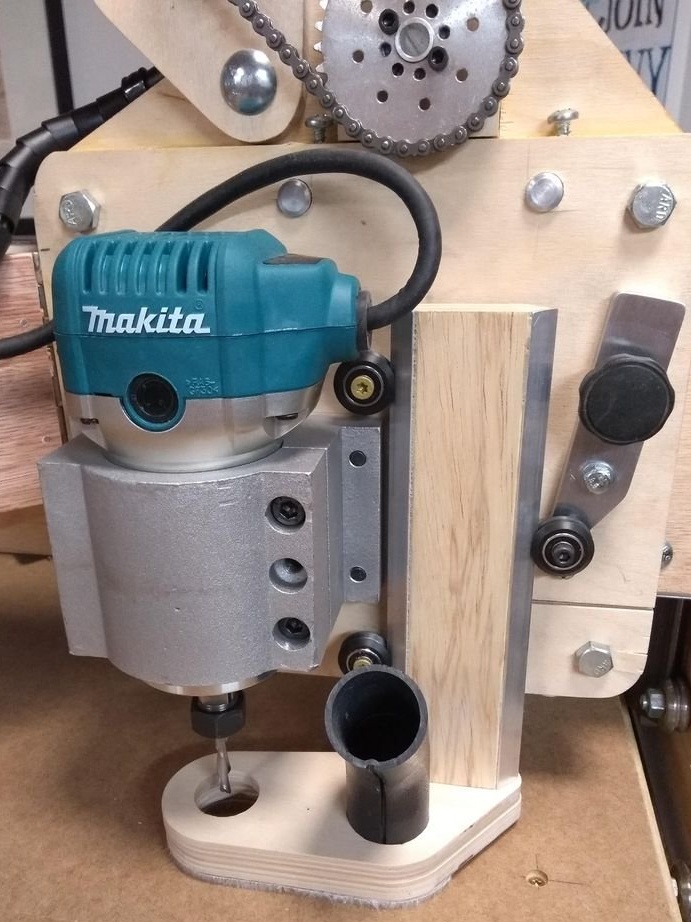
Hakbang Apat: Paggupit ng Pagpuputol
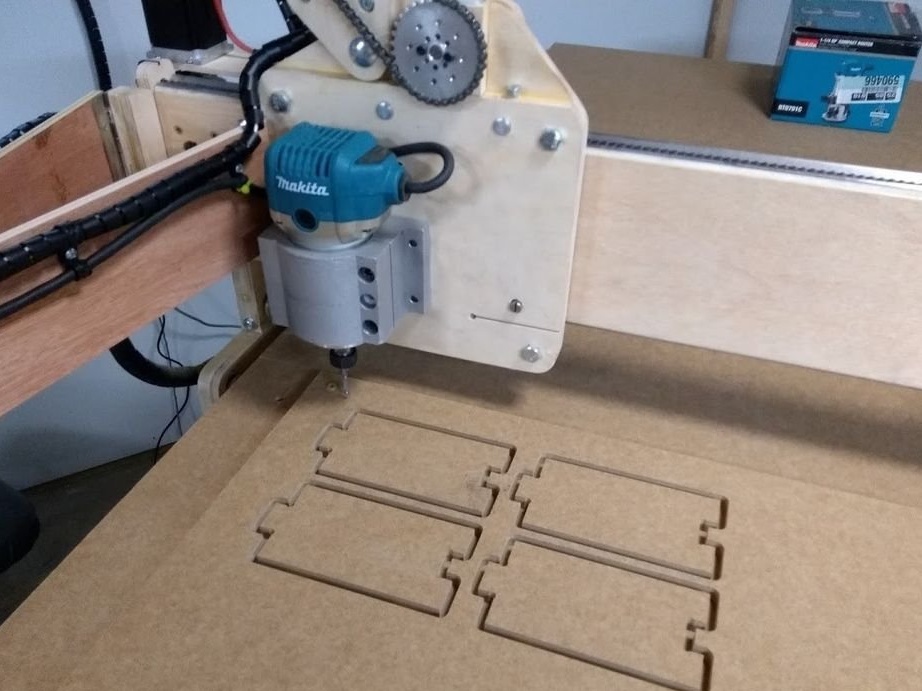
Ang isang Makita RT0701C router ay naka-install sa makina. Gayundin, ang master ay nag-install ng isang adaptor para sa pagkonekta sa mga hose ng vacuum cleaner.



Hakbang Limang: Pamamahala
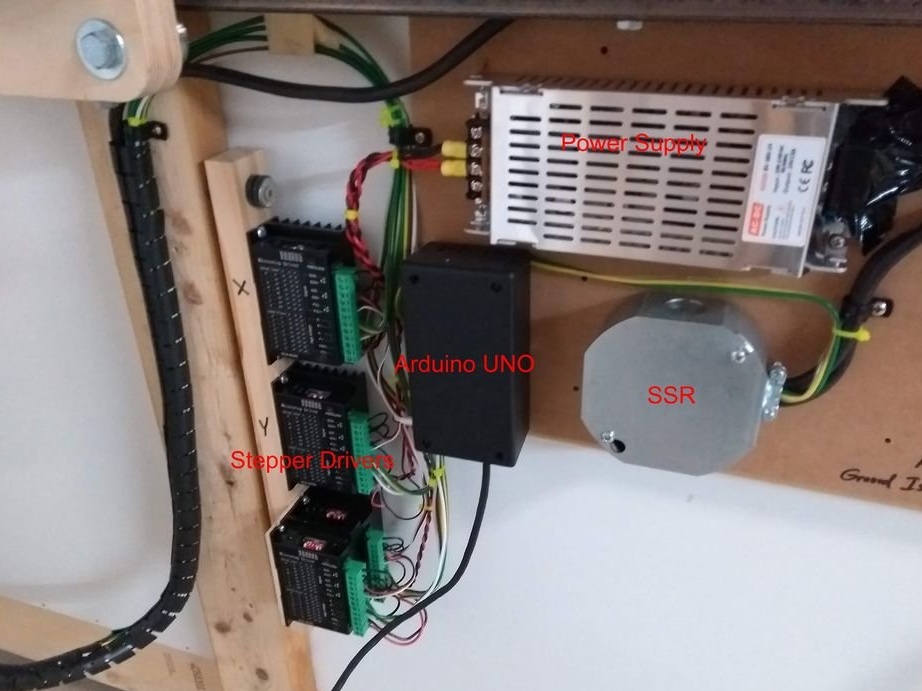
Pamamahala ng sistema batay sa Arduino UNO at isang maliit na PC na may EstlCAM CNC software.
Ang Arduino Uno ay naka-mount sa likod ng makina at sumusuporta sa software ng Estlcam controller. Ang de-koryenteng kahon ay naglalaman ng isang 10A SSR (Solid State Relay), na pumihit at naka-off ang router. Sa kaliwa ay ang mga driver ng TB6600 stepper at isang 24 V, 15 Isang suplay ng kuryente.Ang mga wire sa motor ay dumadaan sa corrugation. Ipinapakita ng isang Windows 10 PC ang imahe sa monitor at kinokontrol ng isang wireless mouse at keyboard.

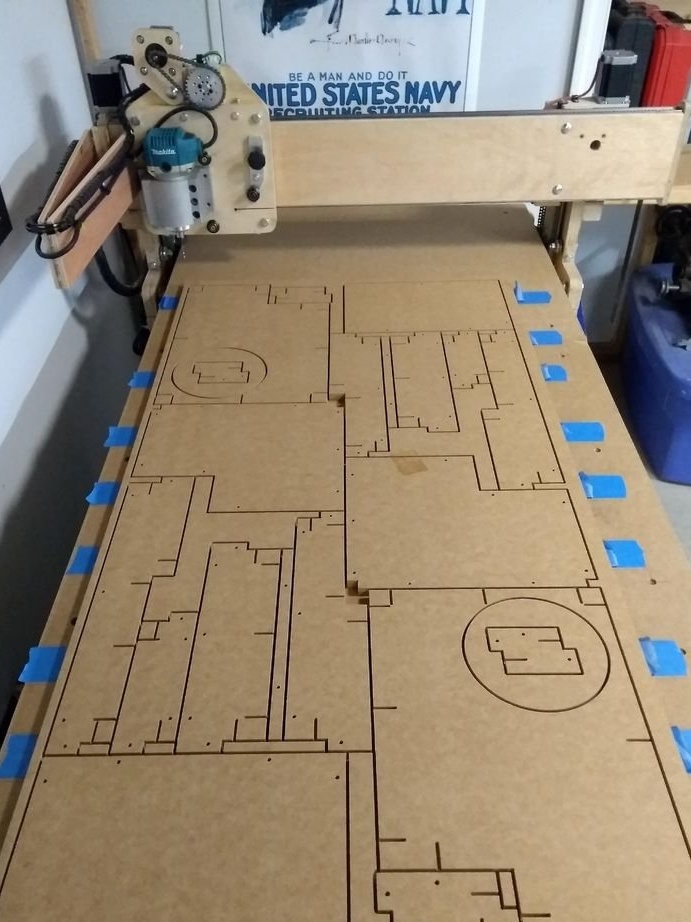
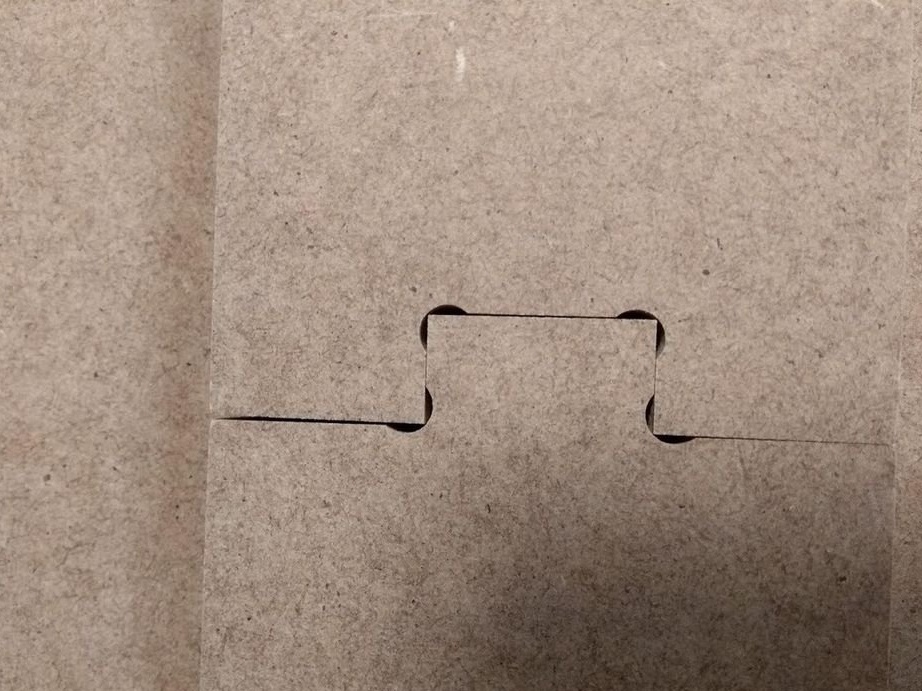
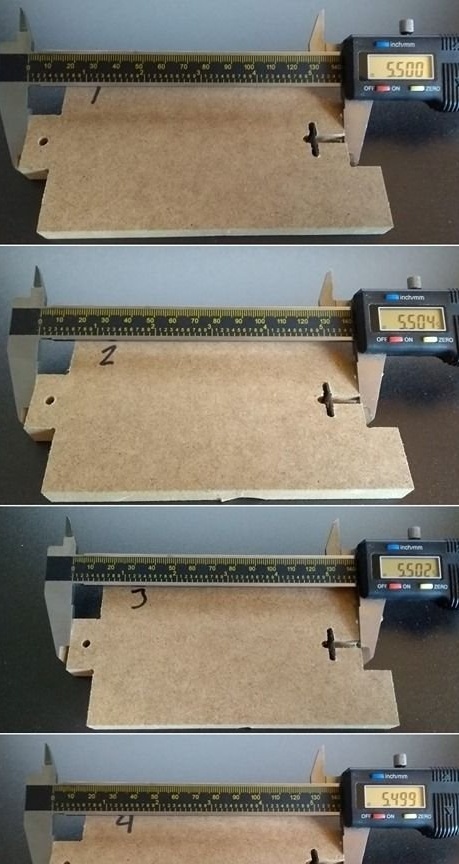
Ayon sa panginoon, ang makina ay naging normal, ang huling larawan ay nagpapakita ng mga halimbawa kung paano gumagana ang makina.