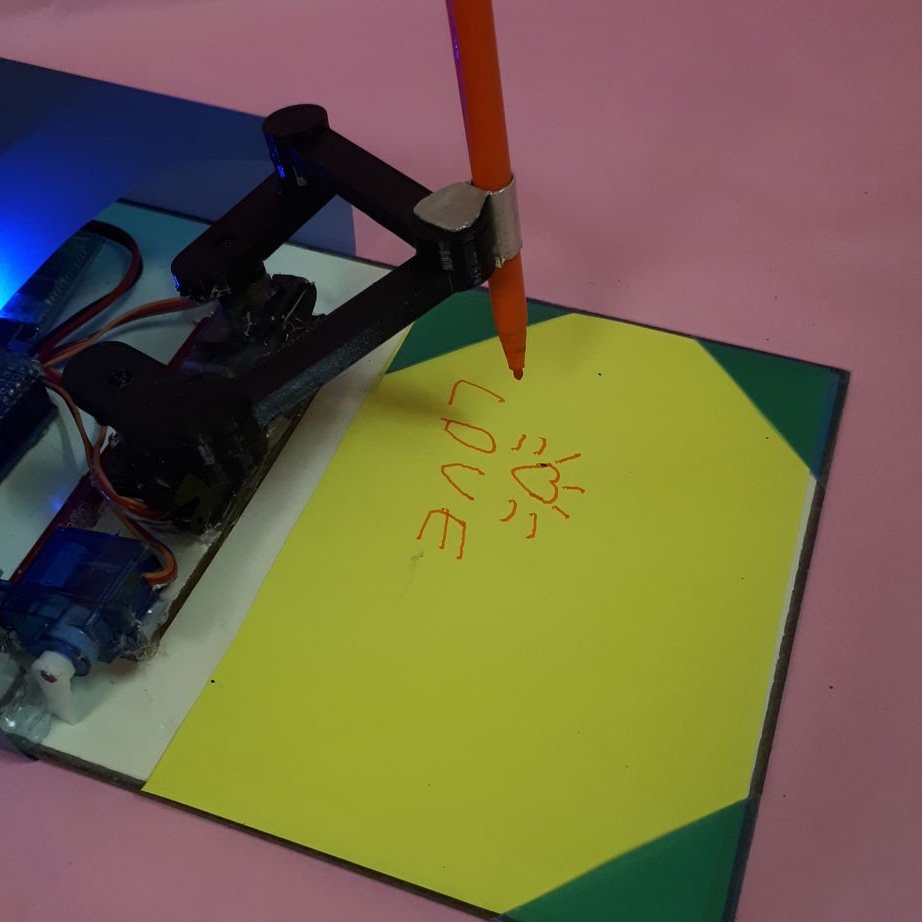
Sa artikulong ito matutugunan namin ang isang kawili-wili gawang bahay - isang aparato na gumuhit at nagsusulat ng teksto sa real time, na kinokontrol sa pamamagitan ng anumang aparato sa Android.
Tingnan natin ang isang maikling video na may isang halimbawa kung paano gumagana ang aparato.
Mga tool at materyales:
-Arduino Uno R3;
- Bluetooth module HC-05;
- Servo drive MG90S - 2 mga PC;
Servo SG90;
- DC boltahe regulator LM2596;
-3.7V 18650 Baterya - 2 mga PC;
- 18650 na may hawak ng baterya;
- Maliit na aluminyo pipe (mula sa lumang FM antenna);
-Acryl;
-Fastener;
-Soldering kagamitan;
-3D printer;
- Panulat ng Ballpoint;
-Smartphone;


Hakbang Una: Ilang Mga Hakbang sa Disenyo
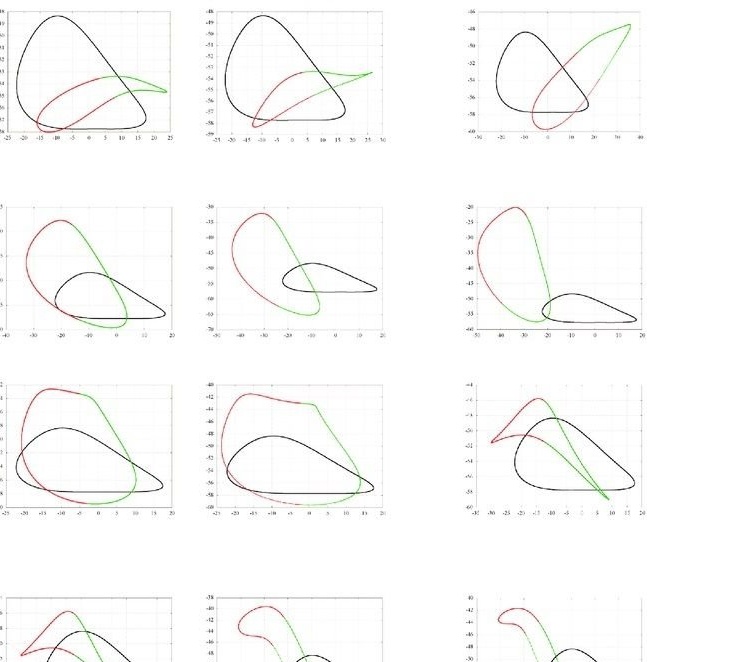
Sa hakbang na ito, ipinaliwanag ng wizard na may isang halimbawa kung paano makalkula ang mga sukat ng mga drive at ang mga lokasyon ng pag-install ng mga servo.
Larawan 1.
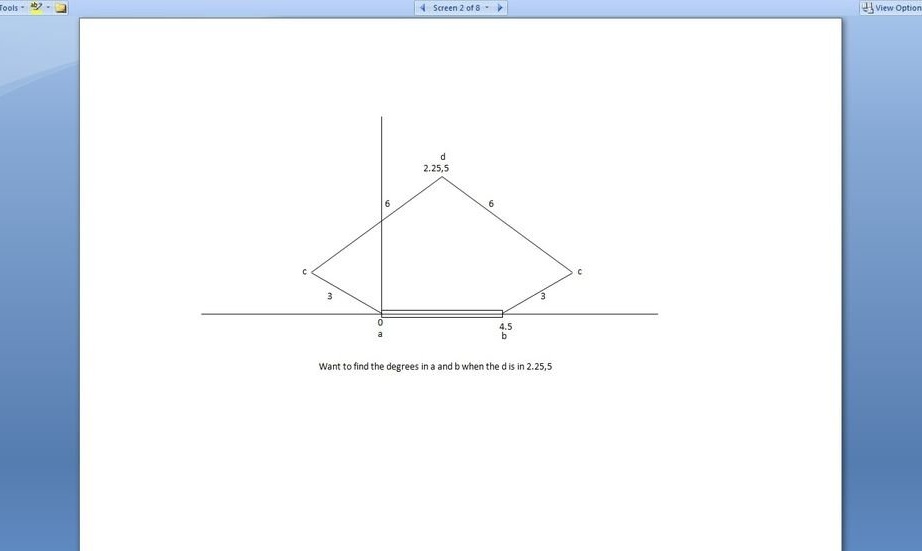
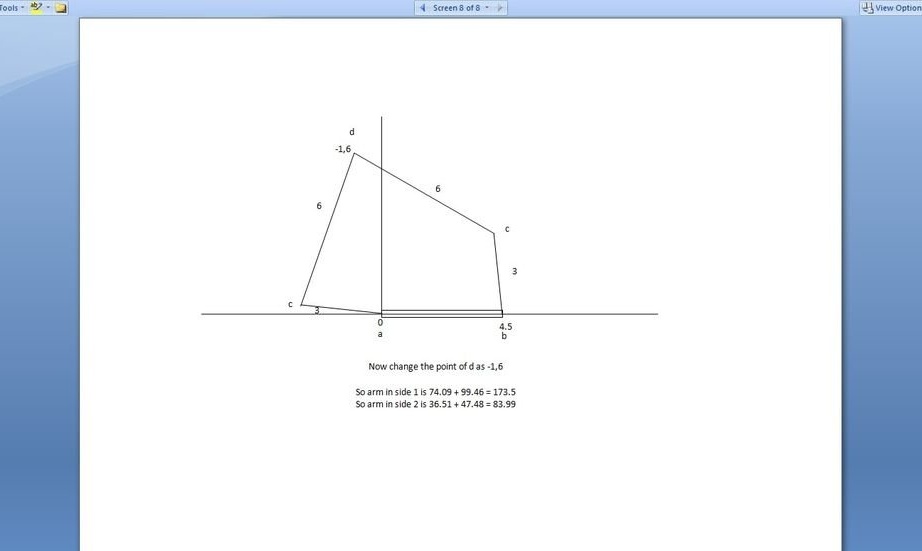
Ang laki ng ibabang braso ay 3 cm, ang itaas na braso ay 6 cm. Ang distansya sa pagitan ng dalawang mga pingga ng servo ay 4,5 cm. Kaya, isasaalang-alang namin ang lahat ng ito sa grapiko at markahan ang unang sentro ng servo bilang 0.0, ang pangalawang 4.5.0.
Larawan 2.
Ngayon markahan ang punto sa graph kung saan ang rod ay kailangang ilipat 2.25.5.
Larawan 3.
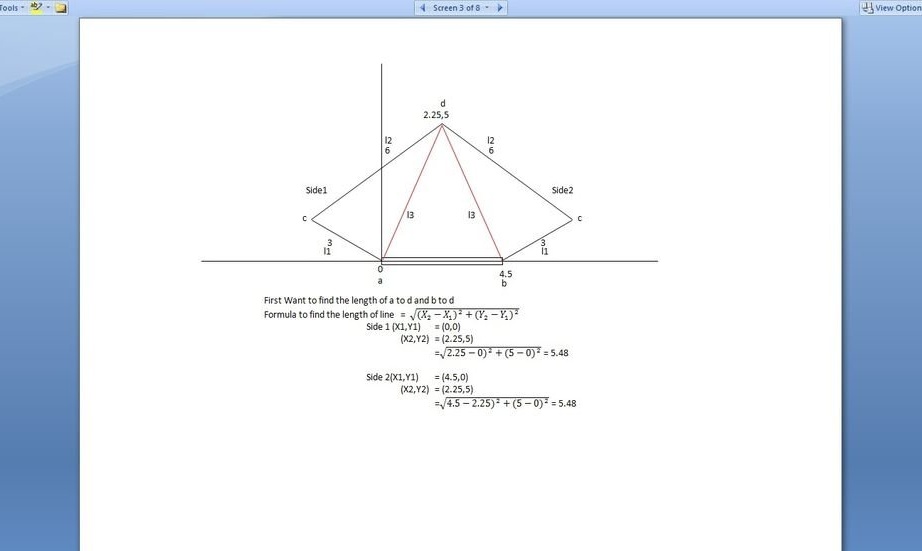
Ngayon kailangan mong hanapin ang haba ng dalawang linya (0,0) - (2,25,5) at (4,5,0) - (2,25,5). Gamitin ang formula ng distansya at teorema ng Pythagorean. Mula sa formula Haba = sqrt ((X2-X1) square + (Y2-Y1) square) (tingnan ang Larawan upang makita ang formula sa tamang format). Ang punto ay matatagpuan sa gitna ng axis ng Y na may isang servo drive, kaya ang magkabilang panig ay may parehong sukat ng tatsulok. Kaya, ang resulta ay 5.48 sa parehong direksyon.
Larawan 4.
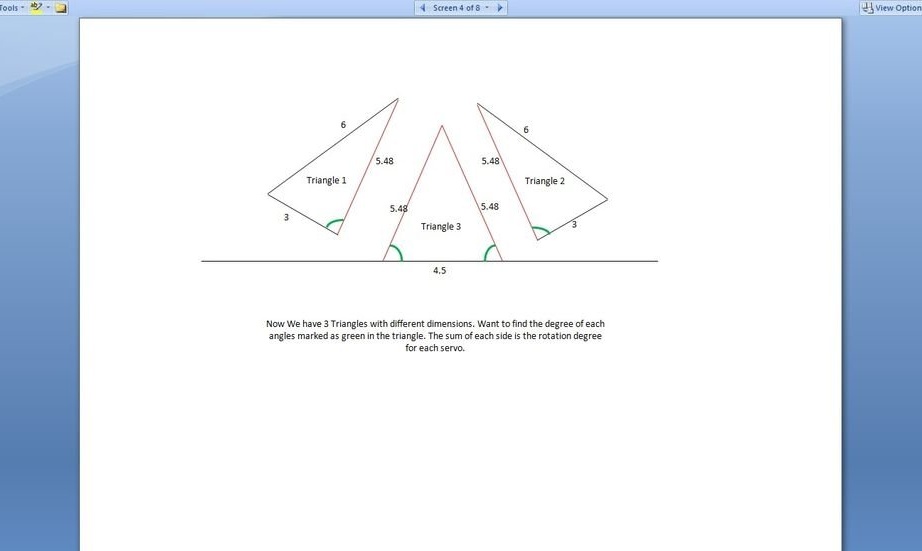
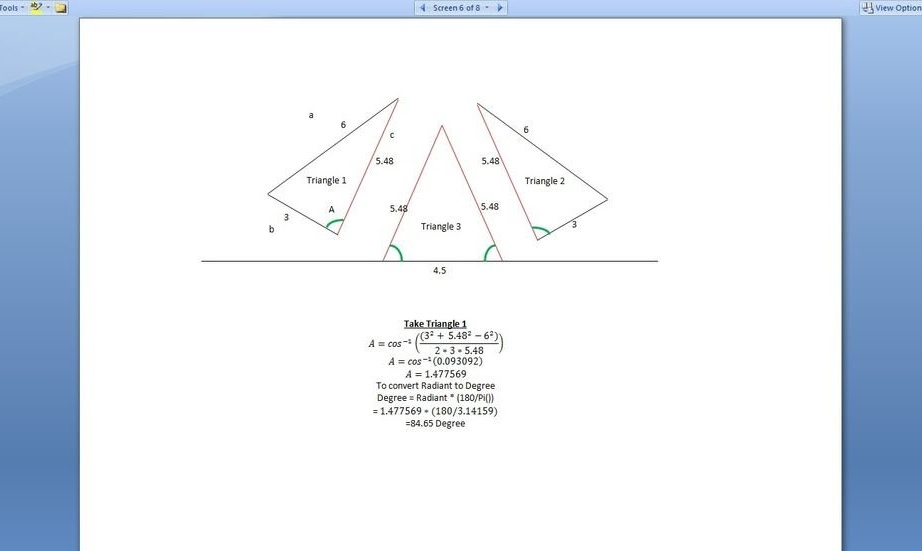
Ngayon kailangan mong paghiwalayin ang mga tatsulok. Nakakuha kami ng 3 tatsulok sa lahat ng kilalang 3 panig.
Larawan 5.
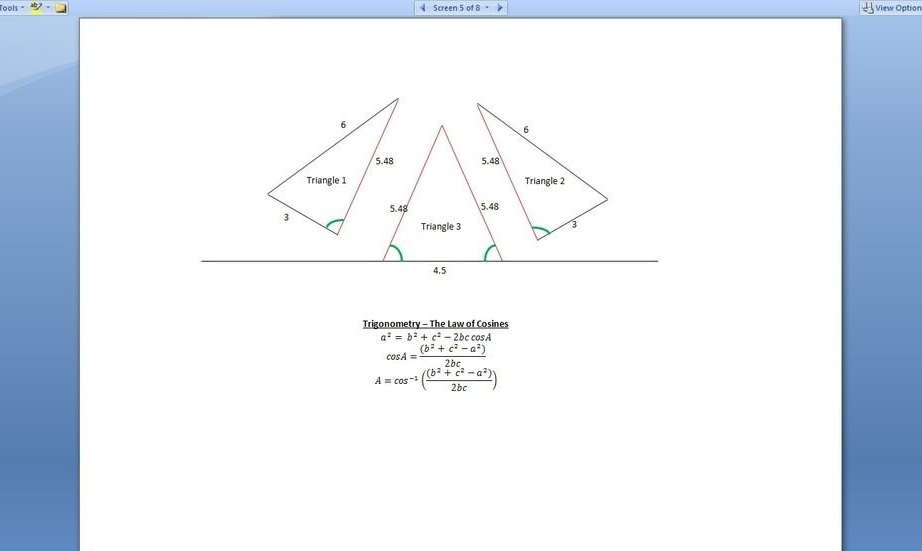
Gumamit ng trigonometrya - ang batas ng mga cosine upang makalkula ang mga anggulo na kailangan namin.
Larawan 6.
Ang resulta ng trigonometrya ay ipinahayag sa nagliliwanag, kaya gamitin ang formula Degree = Radiant * (180 / pi
()) upang i-convert ang nagliliwanag sa antas.
Larawan 7.
Itala ang mga degree sa bawat panig sa antas ng paggalaw ng mga pingga.


Sa Excel, pinatunayan ng wizard ang mga kalkulasyon.
Pagkalkula ng mga kamay.xlsx
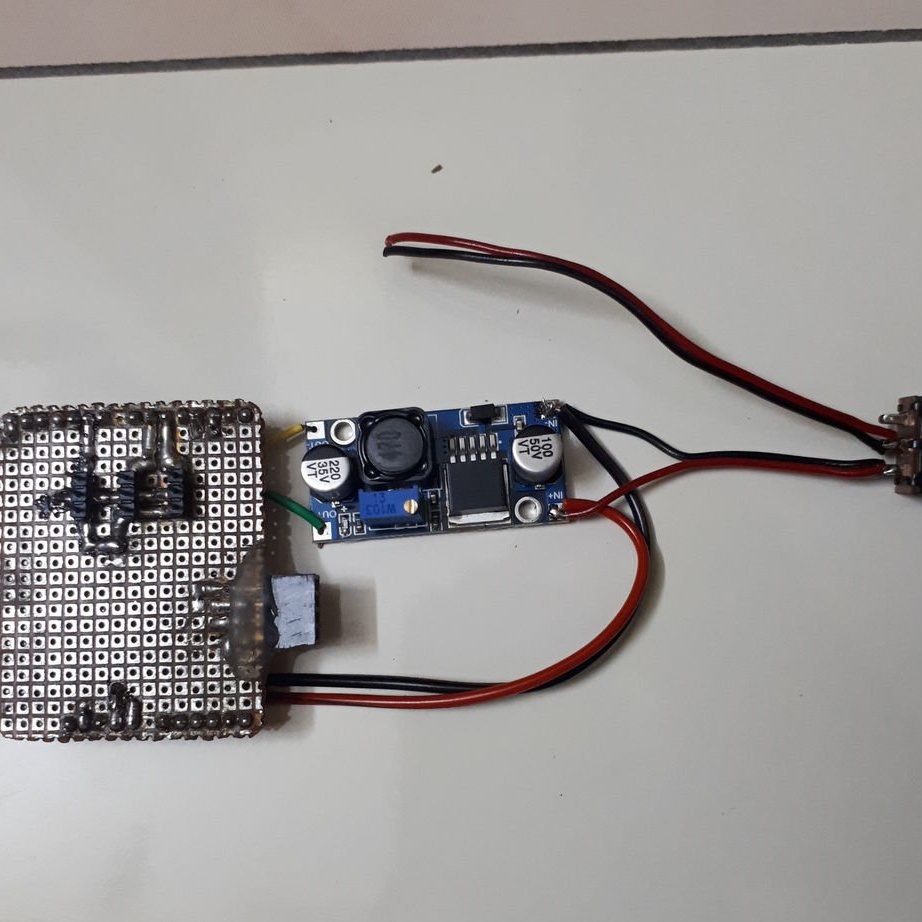
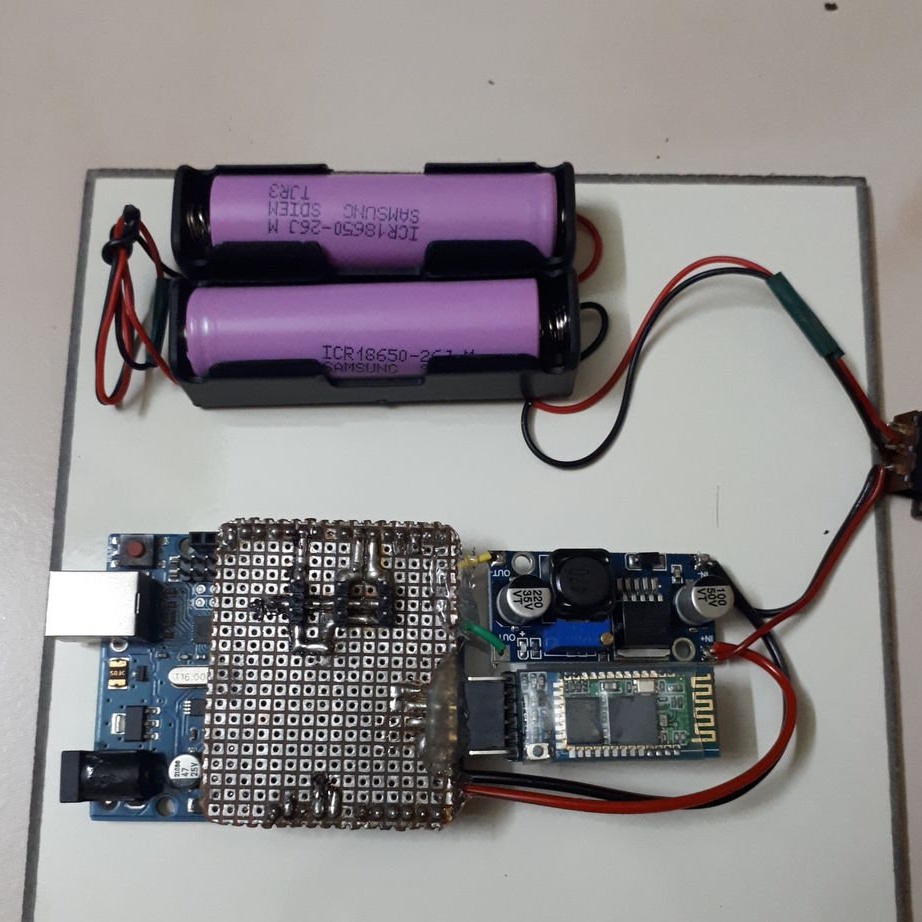
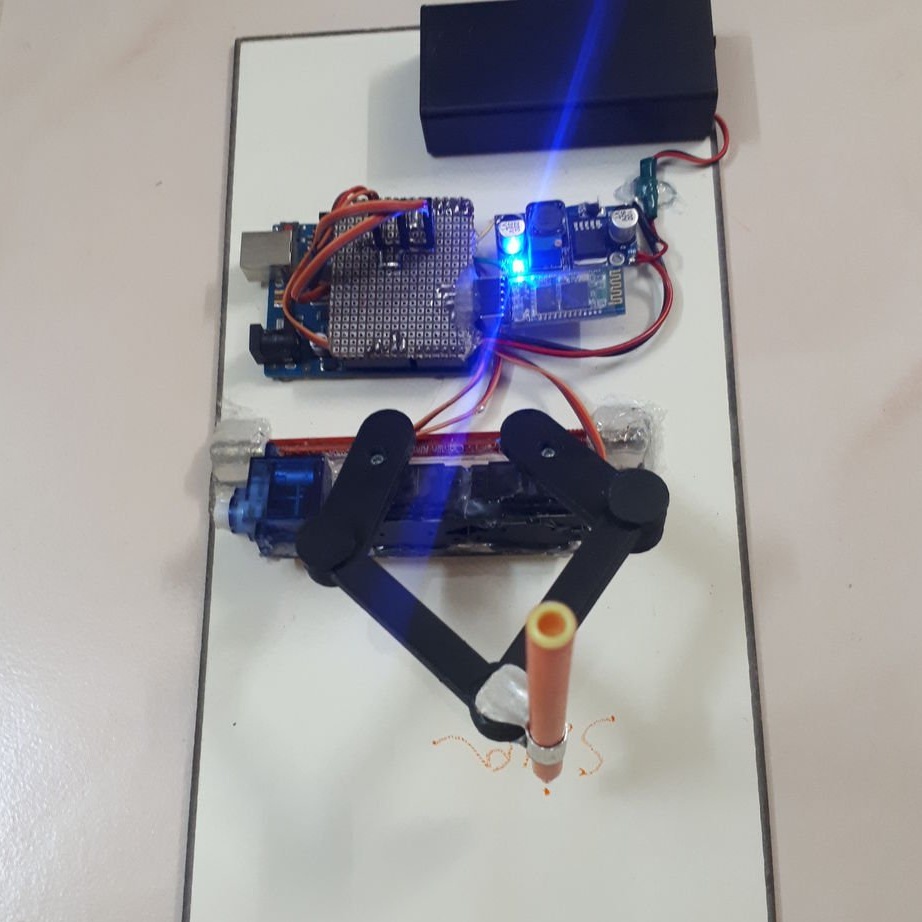
Hakbang Ikalawang: Scheme
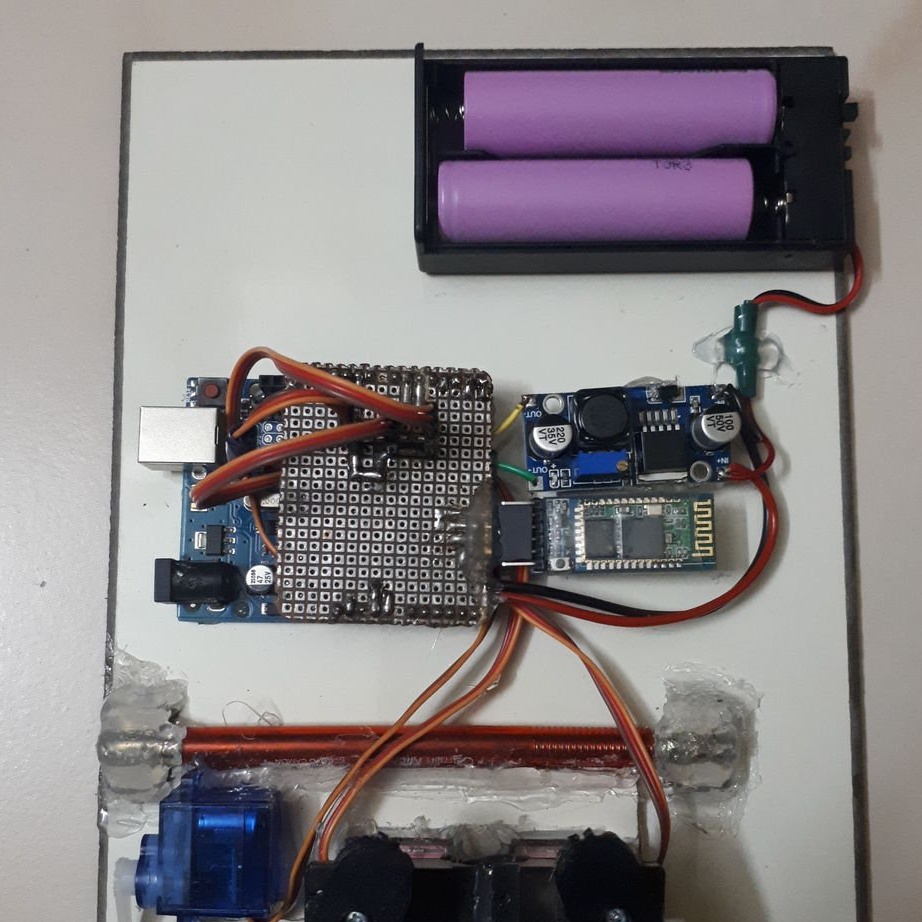
Ito ay isang napaka-simpleng circuit na may tatlong mga servo. Ang koneksyon sa pamamagitan ng mga digital na output 5.6 at 9, kung saan 5 at 6 ay ginagamit upang makontrol ang pingga, at 6 para sa pag-angat. Ang HC05 Bluetooth module ay konektado sa pamamagitan ng Tx sa terminal ng Arduino 0 (RX), at ang RX ay konektado sa terminal ng Arduino 1 (TX). Ang power supply, 7.4 V, mula sa 2 x 18650 na baterya, ay ibinibigay sa Vin-contact ng Arduino at, sa pamamagitan ng LM2596 DC boltahe regulator, sa mga servo.


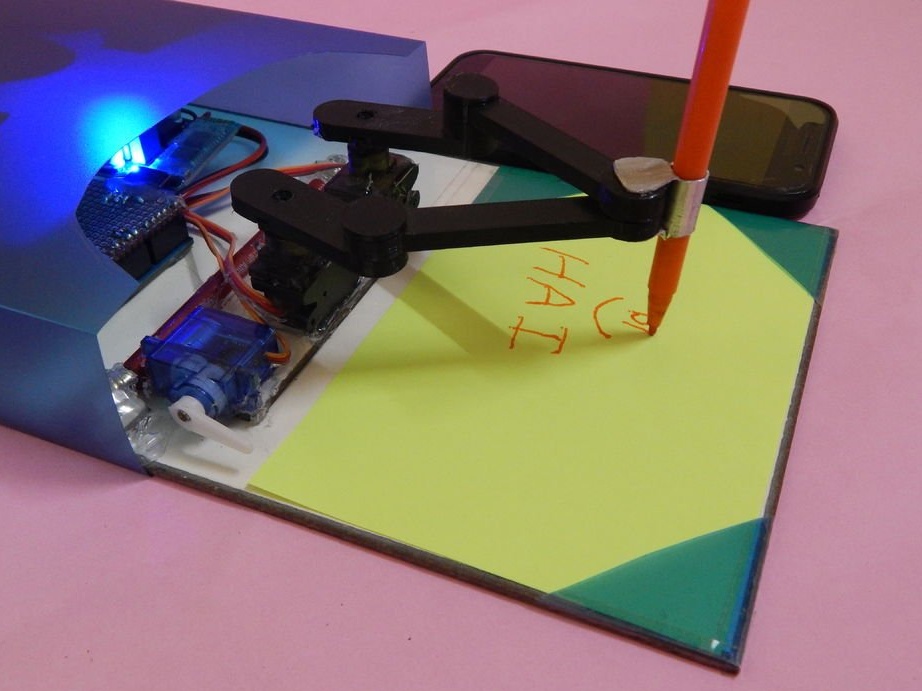
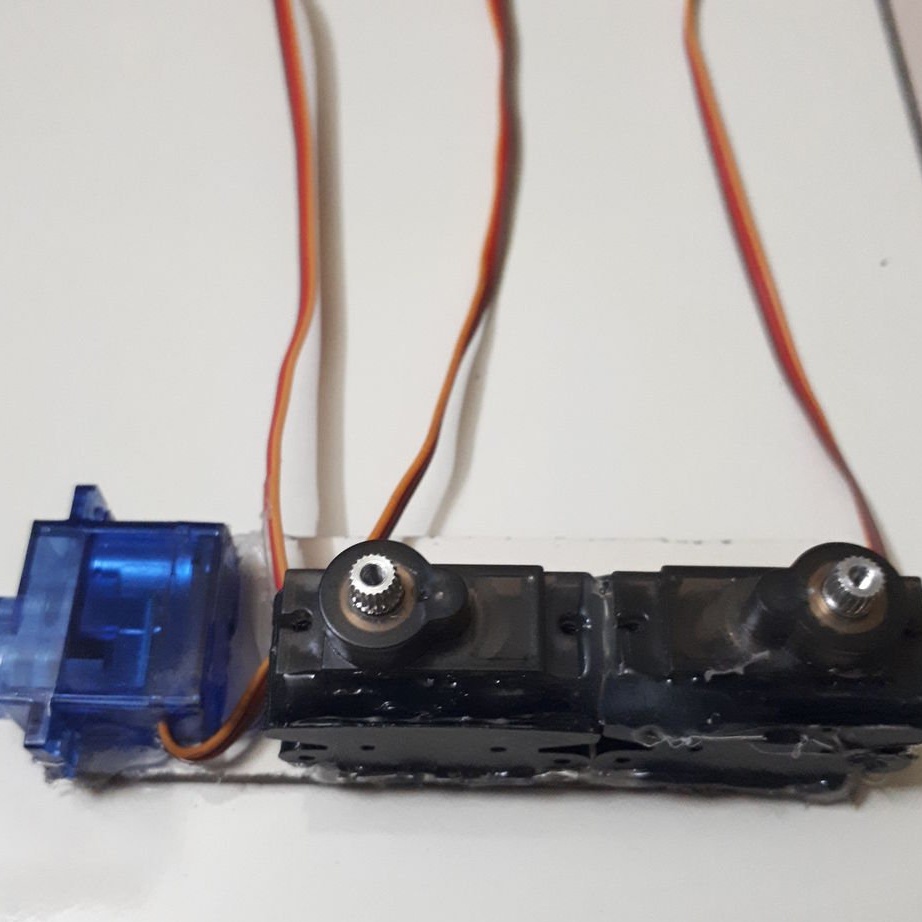
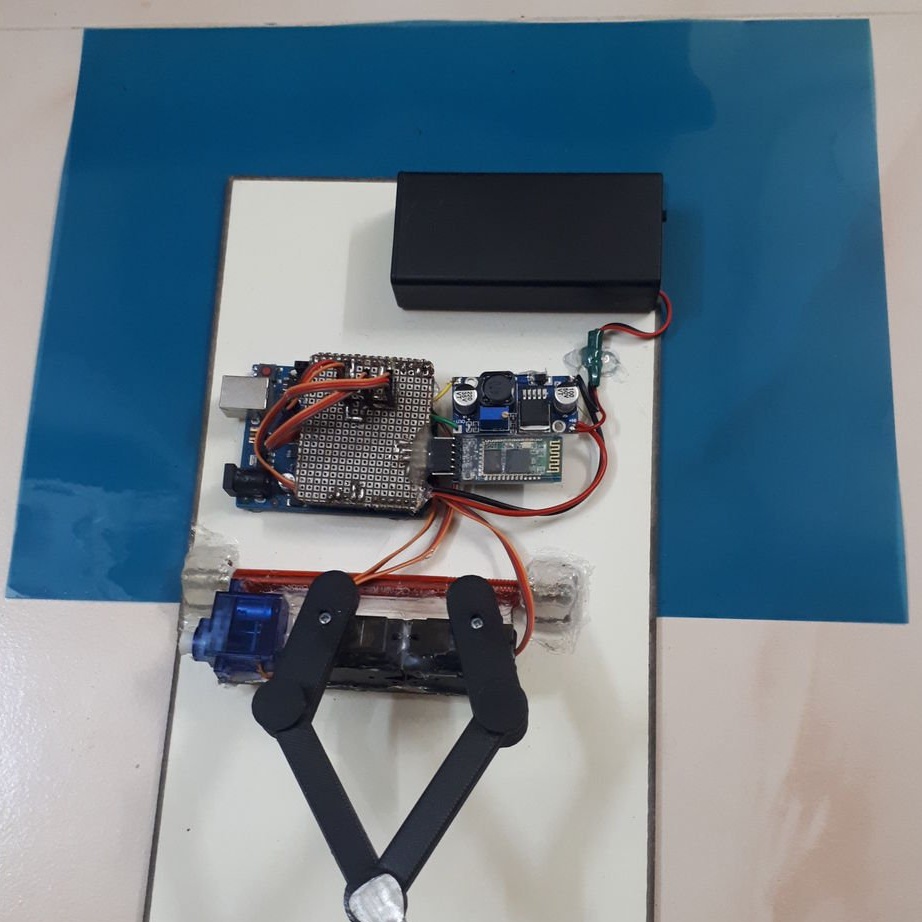
Hakbang Tatlong: Mga Servos
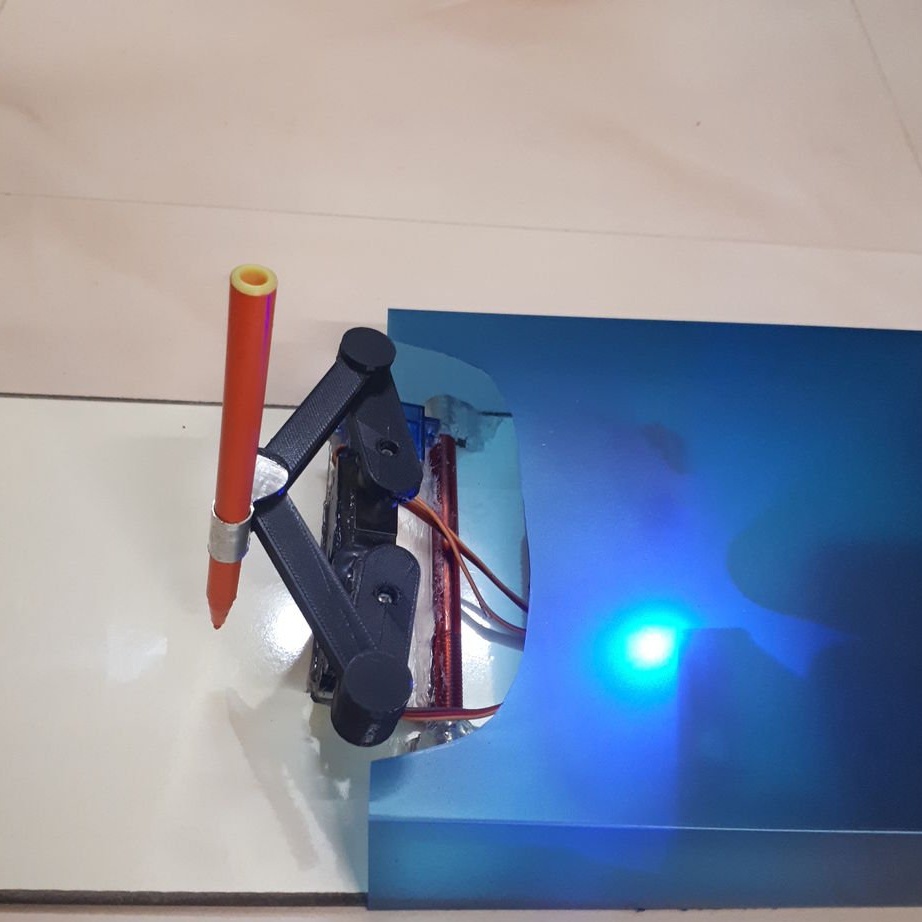
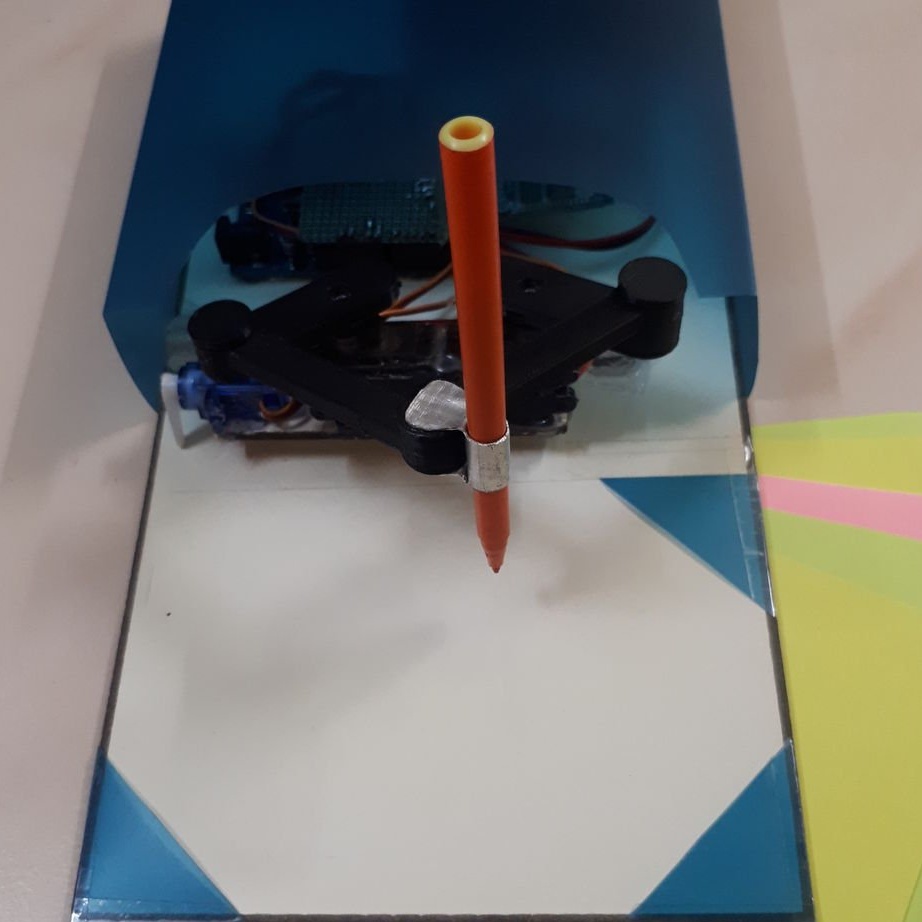
Gumagamit ang master ng dalawang MG90S para sa pahalang na braso at SG90 para sa patayo.Ang mga drive ng Servo ay nakakabit sa acrylic sheet tulad ng ipinapakita sa larawan.




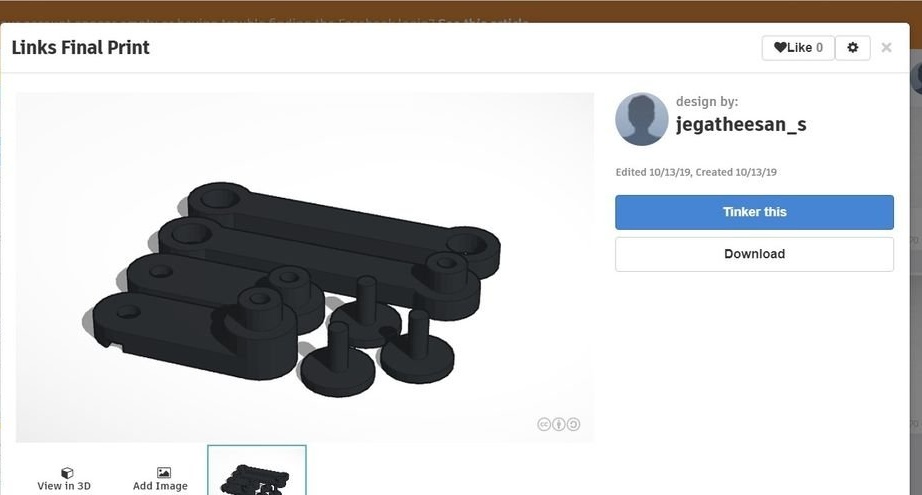
Hakbang Apat: 3D Pagpi-print
Maaari mong i-print ang pingga sa pamamagitan ng pag-download ng mga file sa ibaba.
Leglinks.obj
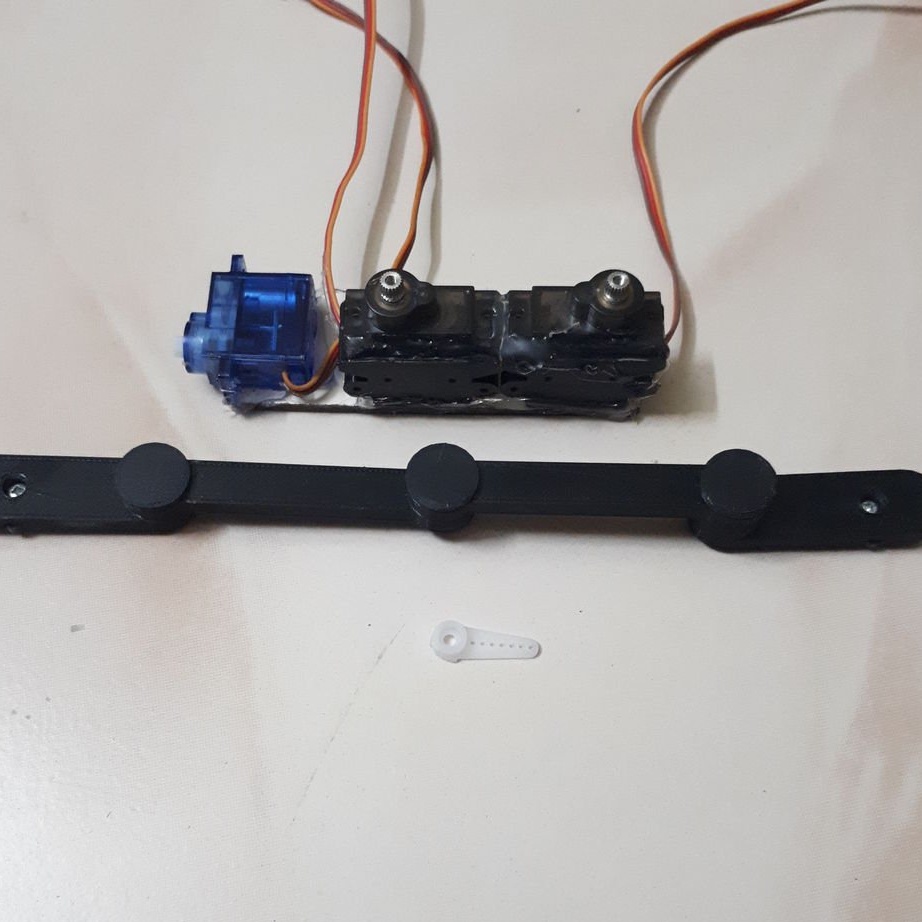
Hakbang Limang: Pag-install ng Horizontal Arm
Susunod, ang master ay nag-mount ng isang pahalang na pingga sa servo.




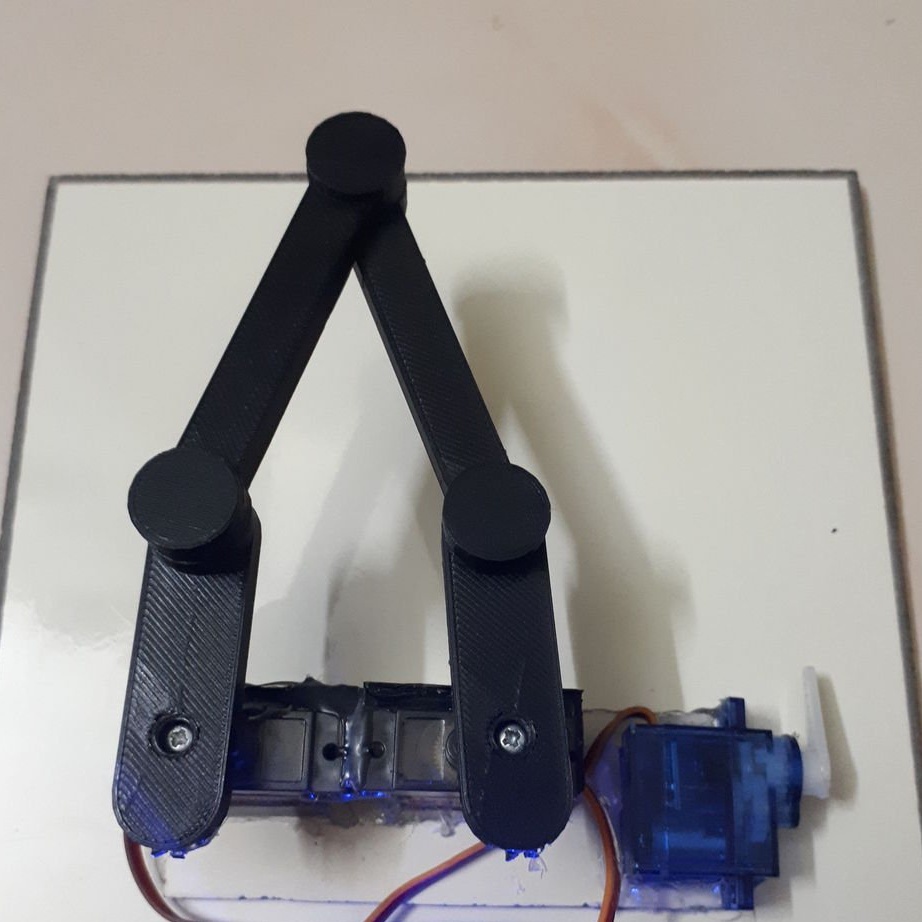

Hakbang Ika-anim: Loop
Ang loop ay gawa sa pabahay ng isang ballpoint pen at isang metal tube. Ang pabahay ay naayos sa base ng servos (acrylic na may nakapirming servo). Ang isang tubo ay naka-install sa pabahay. Ang mga dulo ng tubo ay naayos sa acrylic sheet (ang base ng buong aparato). Kapag ang isang senyas ay inilalapat sa servo drive, ang pingga nito ay nananatili laban sa base, at ang platform na may mga drive ay tumataas.




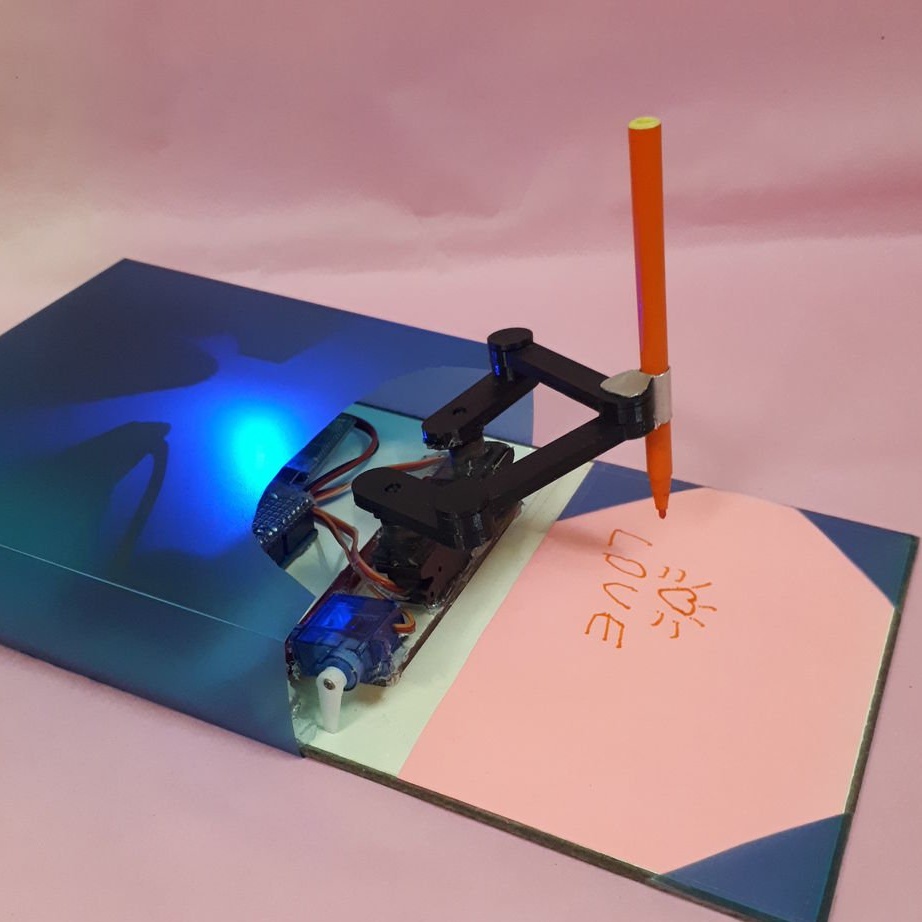
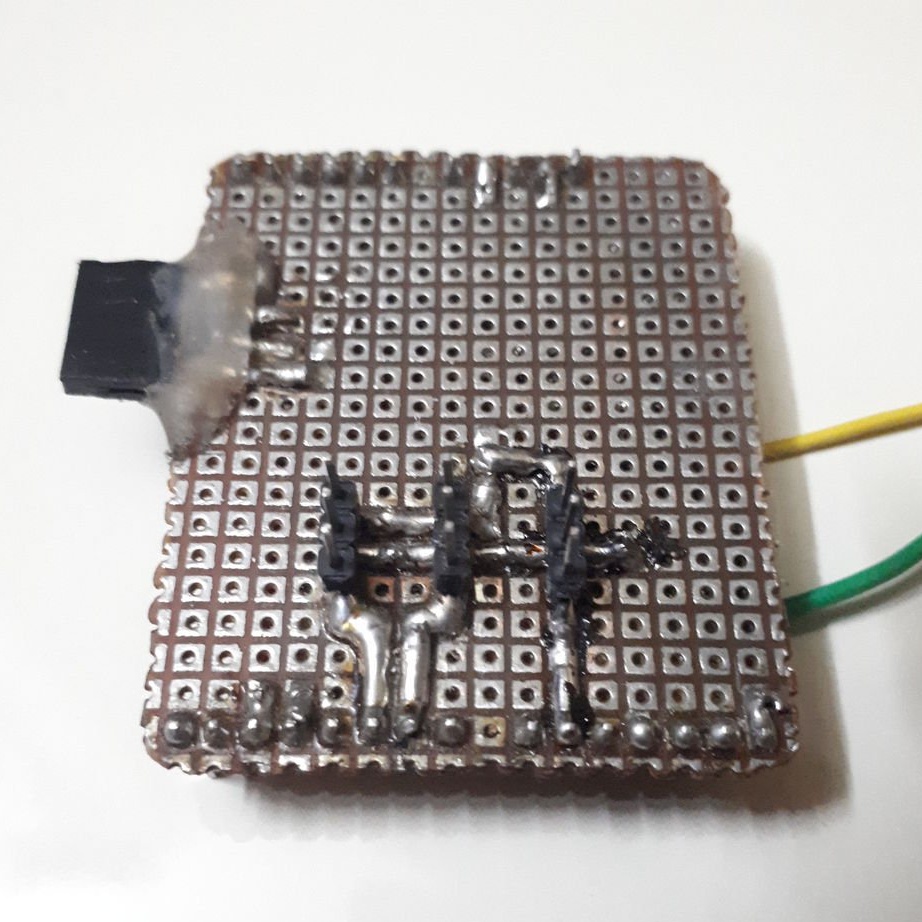
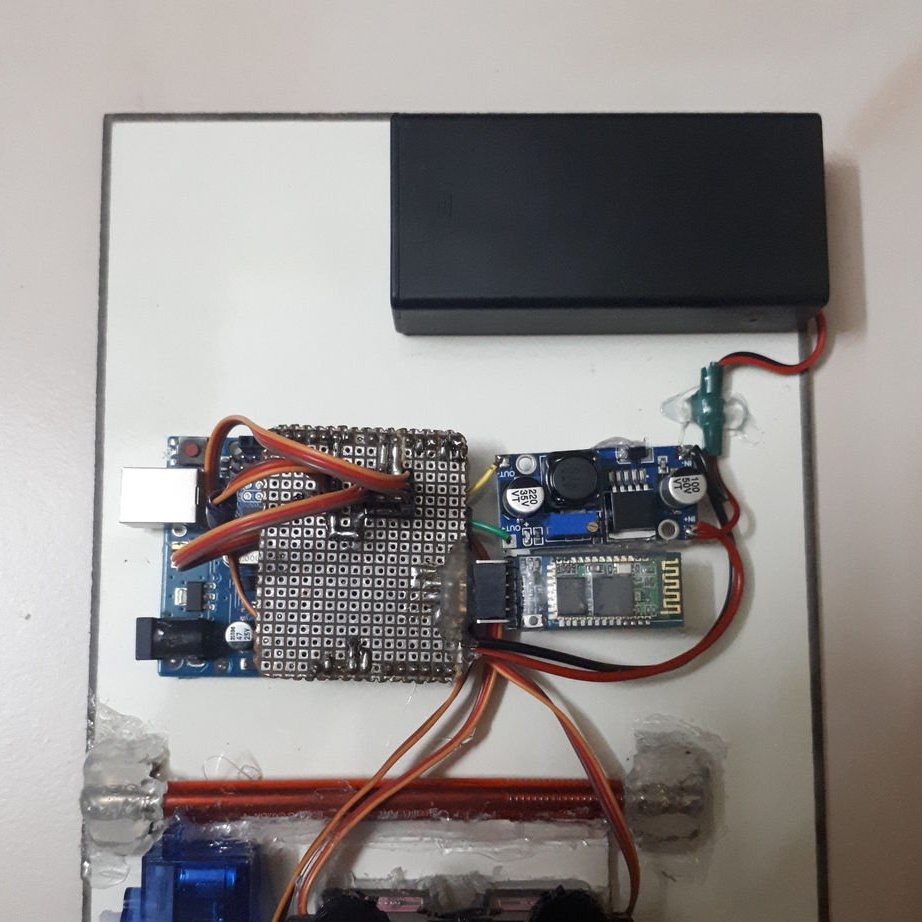
Ikapitong hakbang: pagpupulong
Sa base, ang mainit na natutunaw na malagkit, sinisiguro ang lahat ng mga module at kompartimento ng baterya.




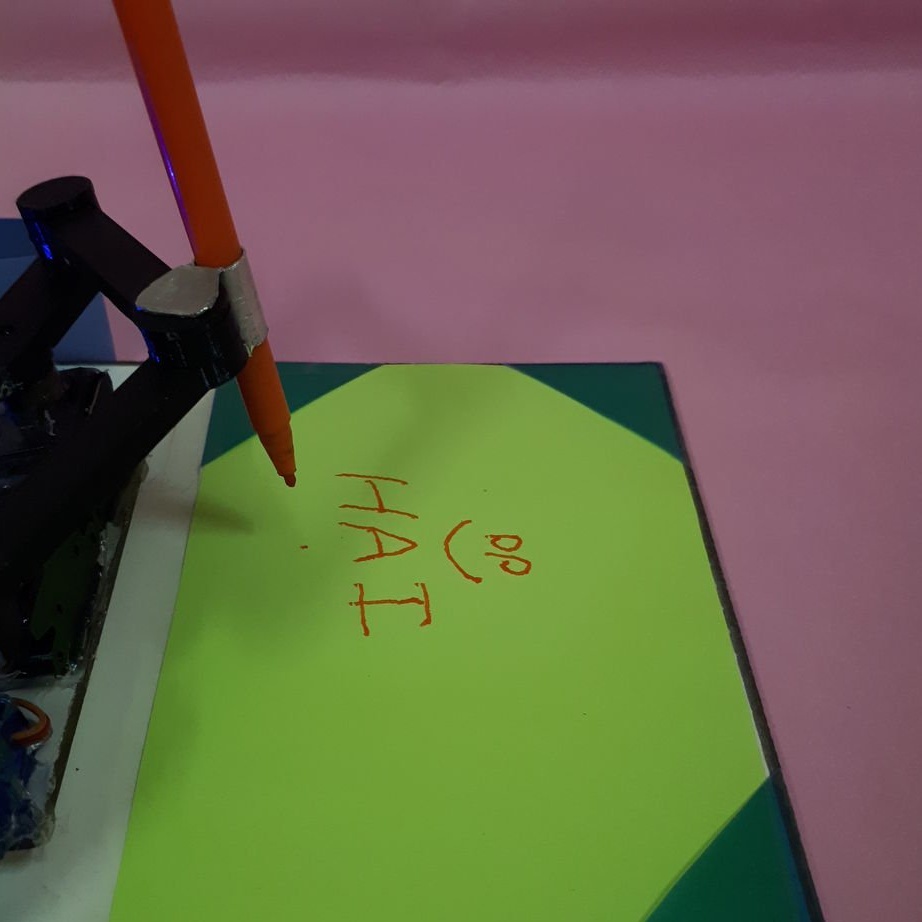
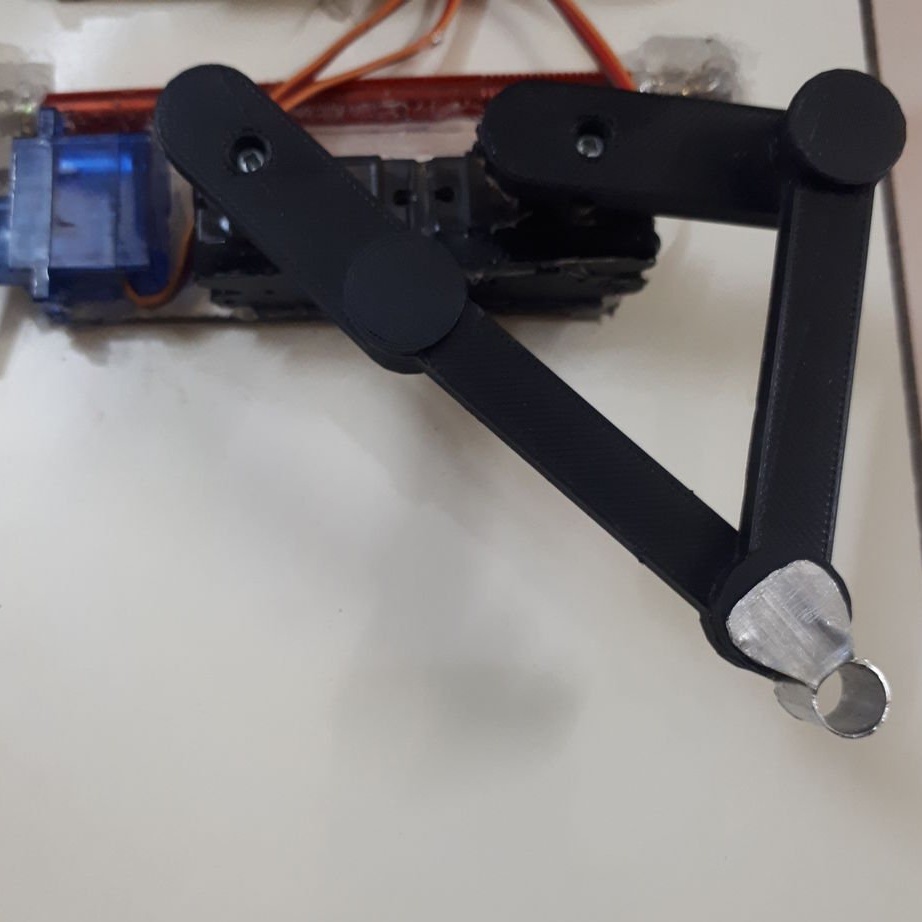
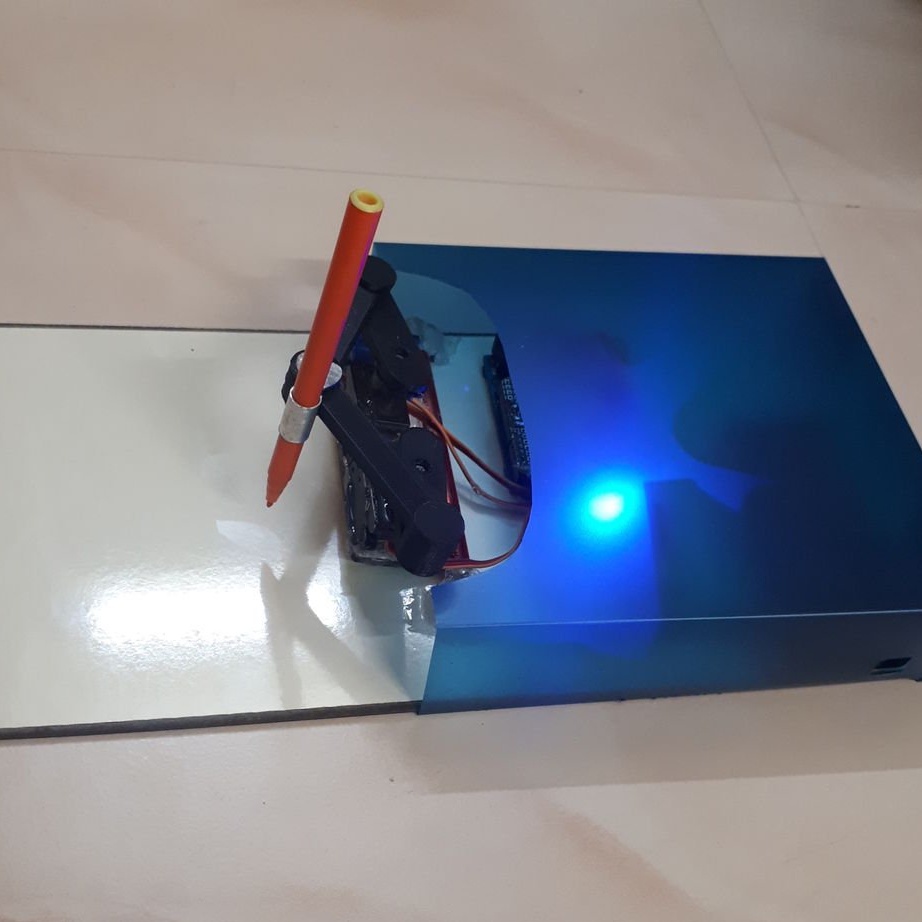
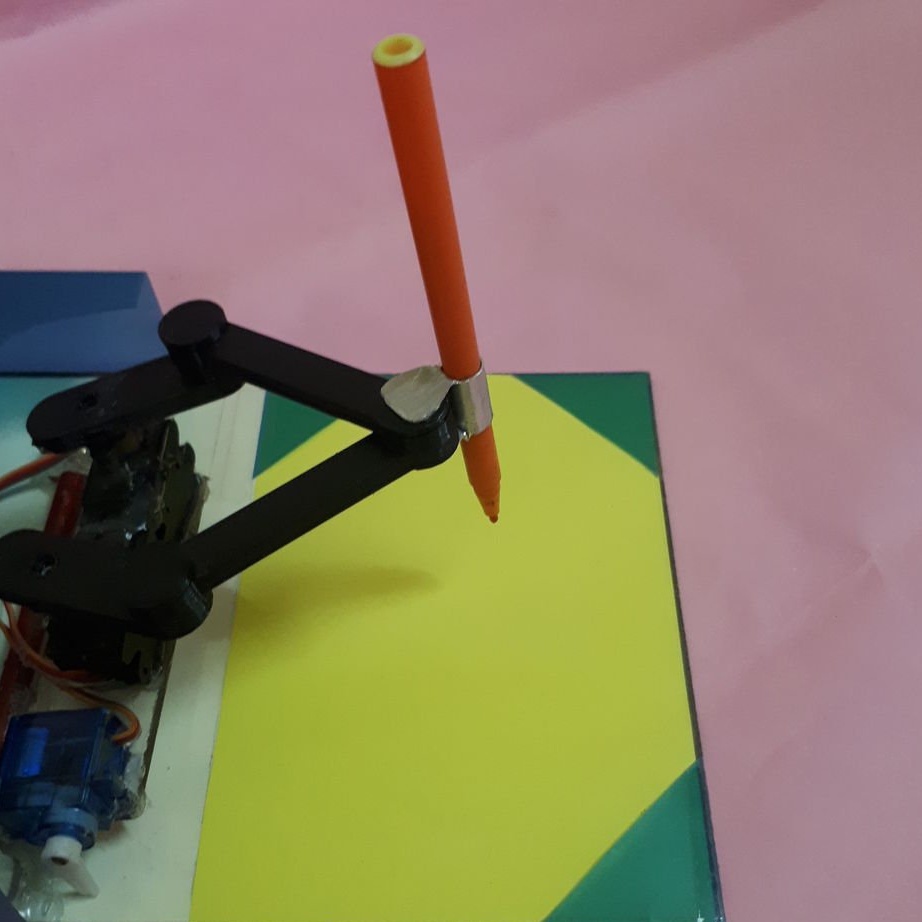
Hakbang Eight: Pen Holder
Ngayon ay kailangan mong gumawa ng isang may hawak ng panulat. Pinutol ng master ang 43 cm ng aluminyo tube. Ang 15 sentimetro ay umatras mula sa parehong mga dulo ng tubo at pinutol sa radius ng tubo. Pagkatapos ay i-cut ang mga segment na ito at iikot ang mga dulo ng tubes.




Mga patak at gigiling mga gilid.


Siniguro ang may-hawak sa pingga, nag-install ng isang hawakan sa may-hawak.


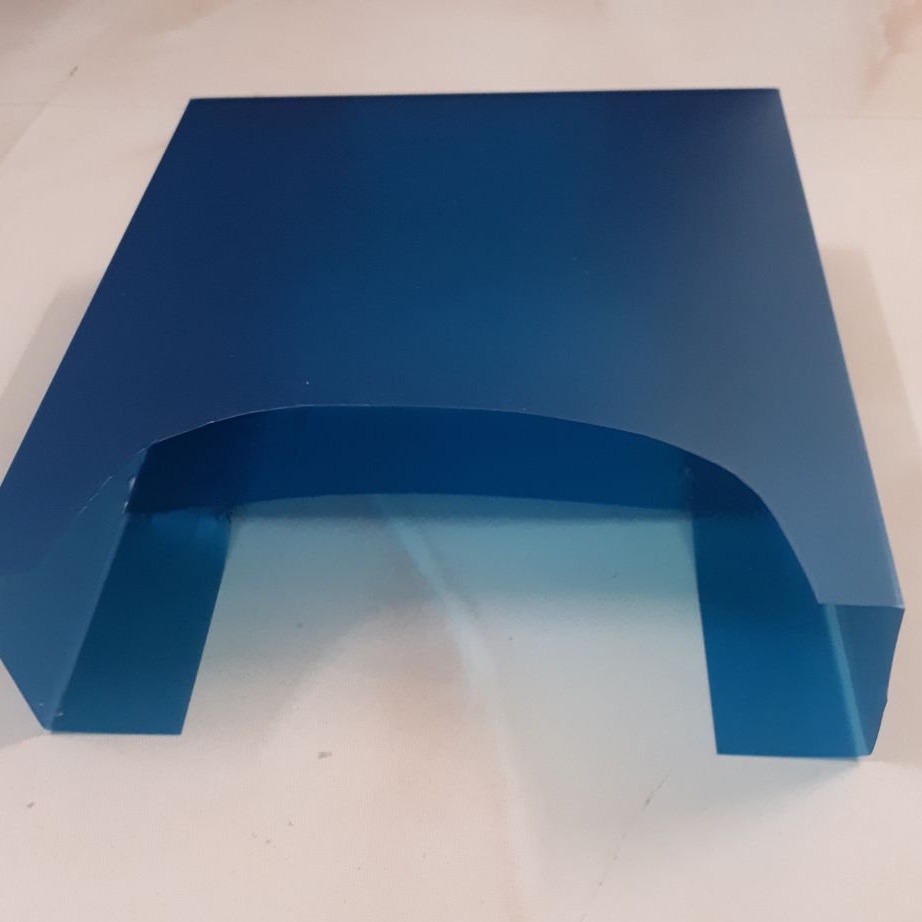
Hakbang Siyam: Ang Kaso
Ginagawa ng acrylic ang kaso ng aparato.



Hakbang Pangwakas: May hawak ng papel
Gupitin ang tatlong tatsulok mula sa acrylic. Secure ang mga ito sa mga sulok ng base sa harap ng pingga.



Hakbang Eleven: Code
Nagpapadala ang isang utos sa Arduino sa pamamagitan ng module ng bluetooth. Ang servos ay umiikot ng 180 degree nang pahalang at 60 degree nang patayo. Kung ang anggulo ay mas malaki, ang pingga ay tumataas at nag-freeze sa tuktok na punto.
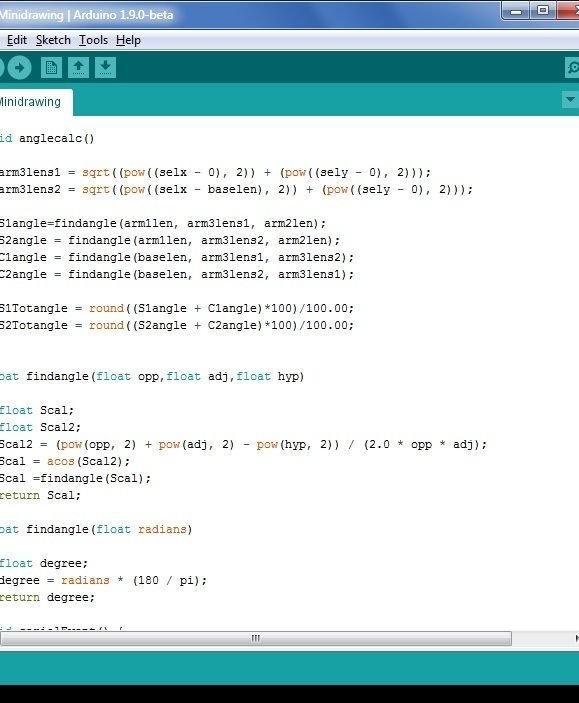
Ang code ay maaaring ma-download sa ibaba.
Arduino.rar mini-pagguhit
Hakbang Labing: Application ng Android
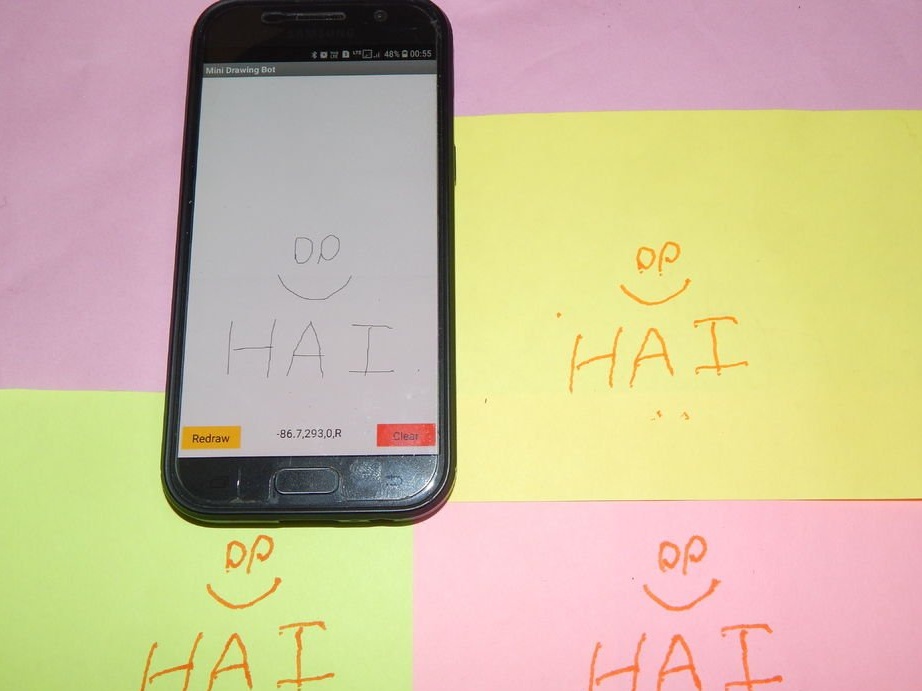
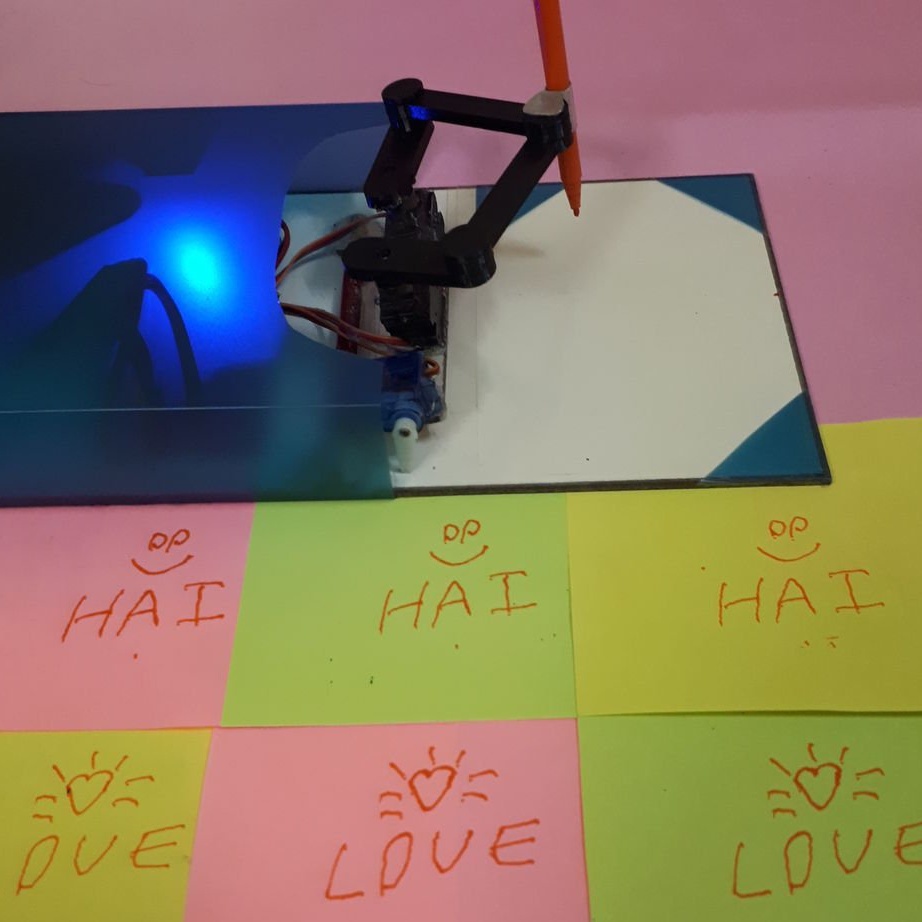
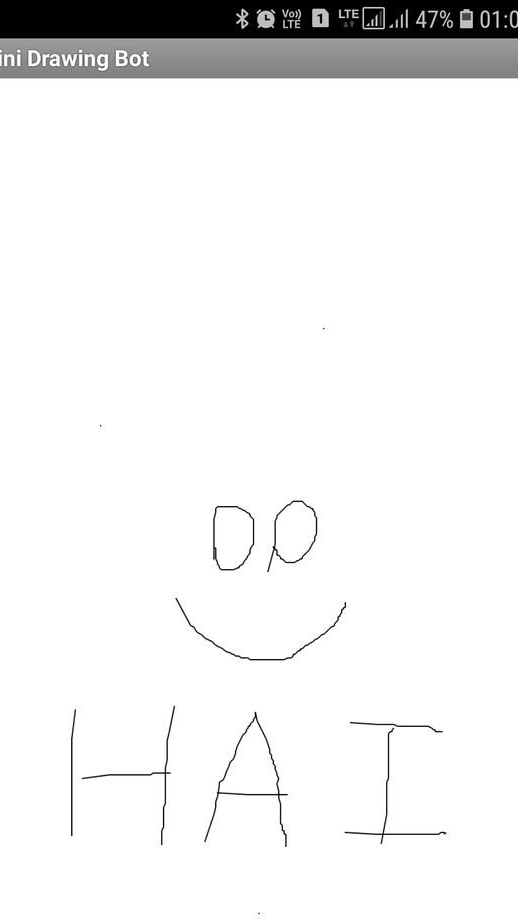
Upang makontrol ang aparato gamit ang mga gadget ng Android, ang master ay bubuo ng isang espesyal na application. Ipares ang smartphone kasama ang Arduino at ilunsad ang programa. Ang programa ay may isang window para sa pagguhit. Ang lahat ng mga character na nakasulat sa screen ay muling kopyahin ng aparato. Sa ilalim ng screen mayroong dalawang mga pindutan ng control at isang shortcut na nagpapakita ng utos. Dahil sa haba ng pingga na kailangan mong sumulat sa ilalim ng screen.


Ang programa, sa dalawang bersyon, para sa mga gumagamit at mga developer, ay maaaring ma-download sa ibaba.
Mini-drawing aia file.rar
Minidrawing apk file.rar
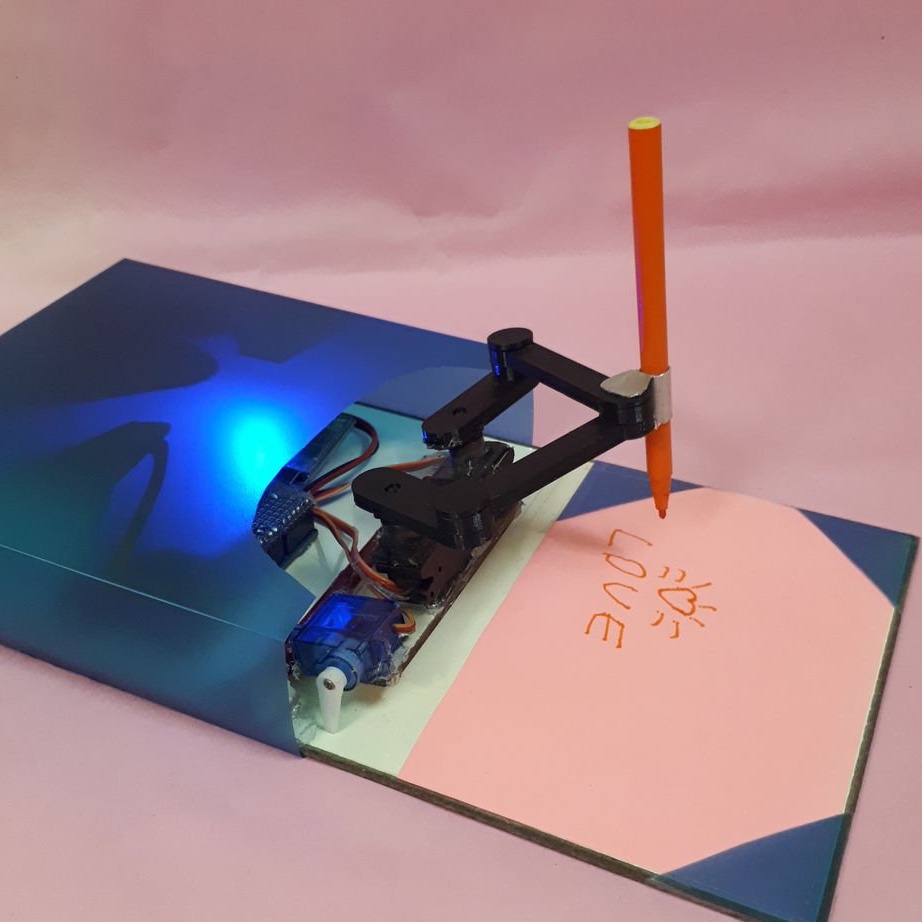
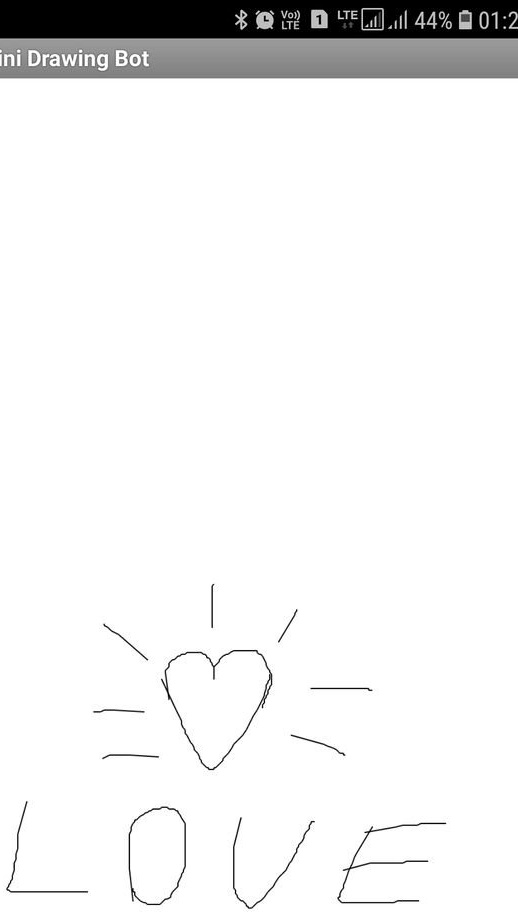
Susunod, ang wizard ay nagsasagawa ng isang pagsubok ng aparato.
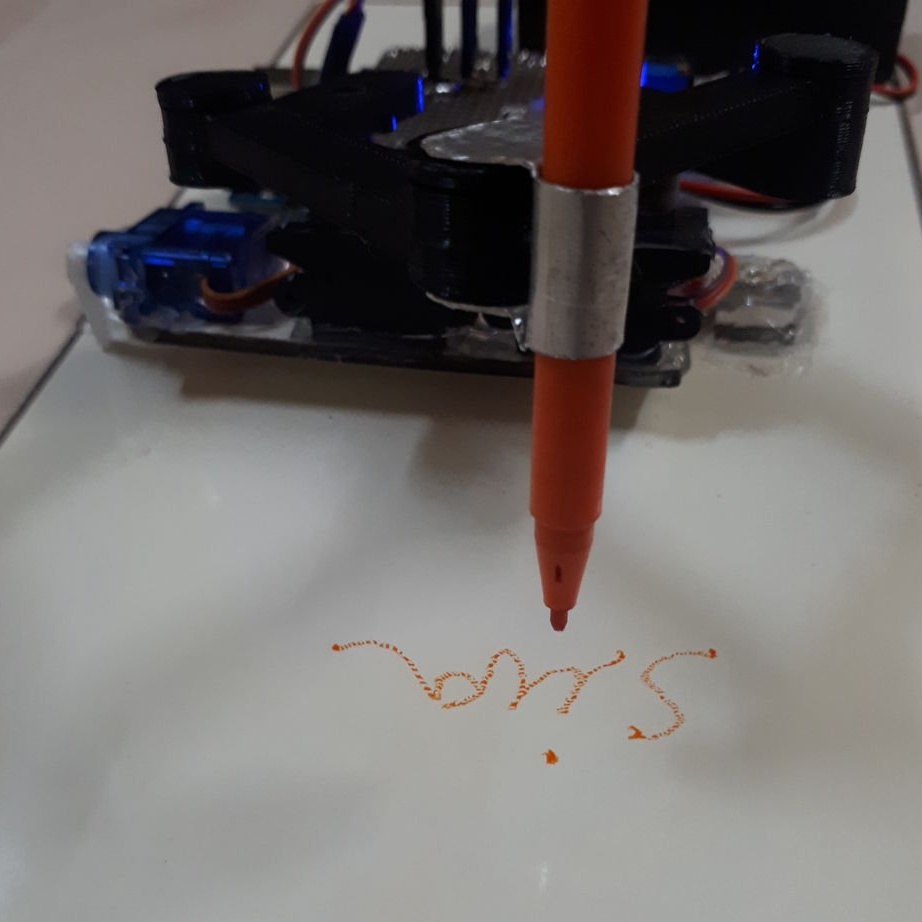
Handa na ang lahat.