

Nais mo bang magkaroon ng away sa pagitan ng mga robot ng spider? Pagkatapos ay pag-aralan nang mabuti ang artikulong ito, sasabihin sa iyo ng Master kung paano gumawa ng tulad ng isang spider. At para sa kalinawan ng kanyang trabaho, tingnan natin ang video.
Mga tool at materyales:
Para sa gagamba
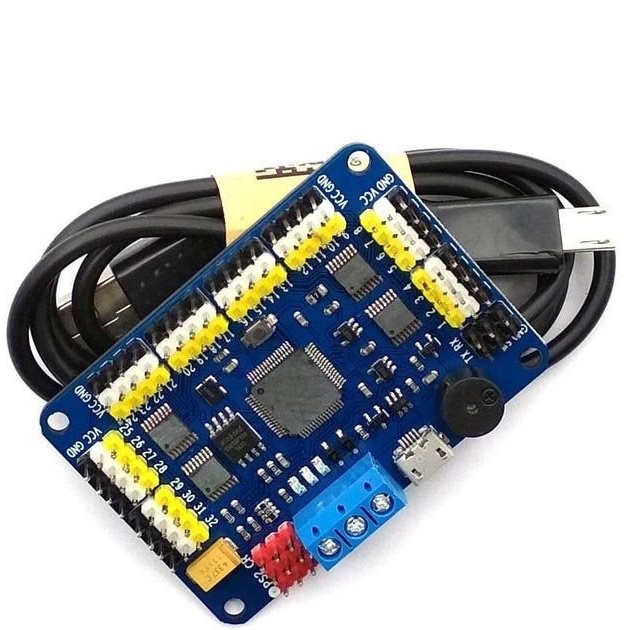
32-channel servo controller;
-Wemos D1 Mini magsusupil;
- MG90S Servo Drives - 18 mga PC;
-Ubec 6A 5V magsusupil;
- DC-DC buck converter;
- Mga Jumper;
-Baterya;
Para sa tower
-Doble engine;
-Husay na module;
- Pagbaba ng converter;
Servo;
-3D printer;
-Glue gun;
-Glue;
- distornilyador;
-Fastener;
- Double-panig na tape;
-Mga gamit;
-Knife;
-Nadfiles;
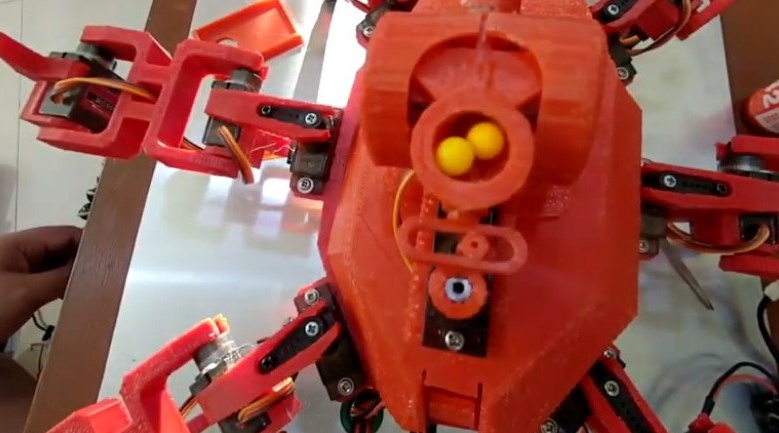
-Plastic bola;
-Mga accessory;






Hakbang Una: Pag-print ng mga Bahagi
Una kailangan mong i-print ang mga detalye ng katawan at binti sa isang 3D printer. Maaari kang mag-download ng mga file para sa pag-print sa ito ang link.


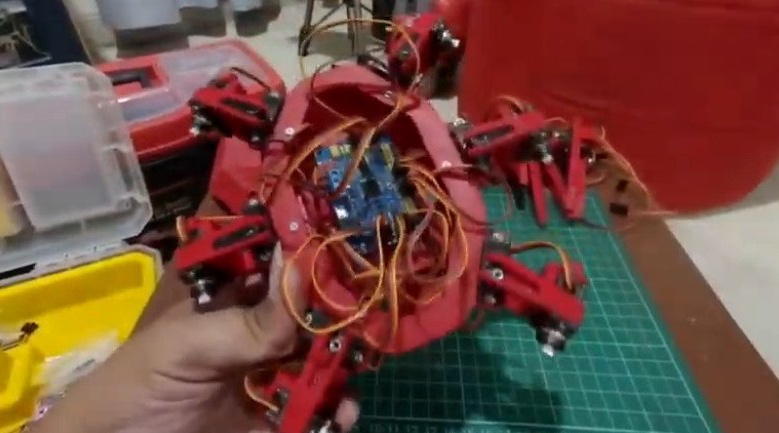
Hakbang Dalawang: Bumuo
Ngayon kailangan mong mangolekta ng robopauk.
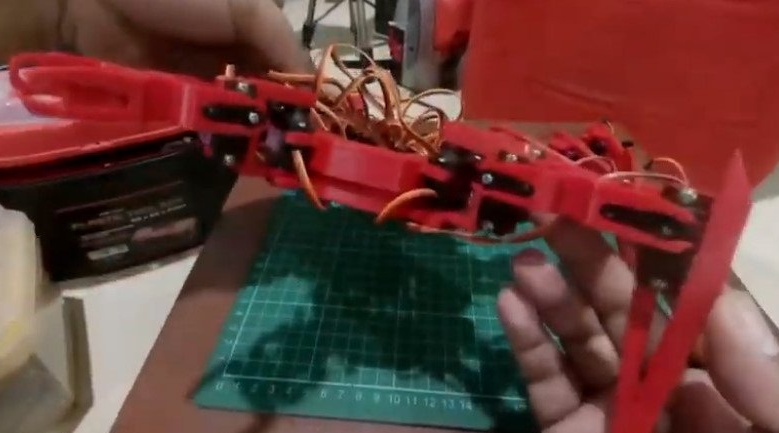
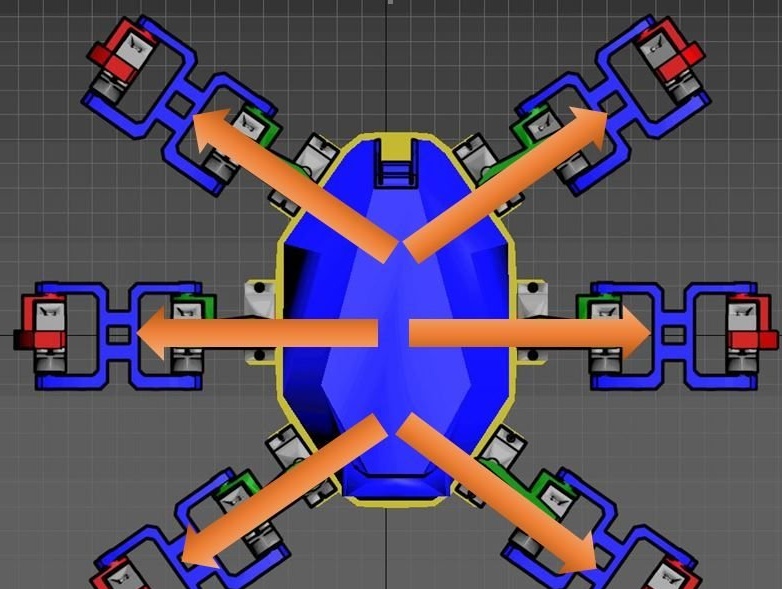
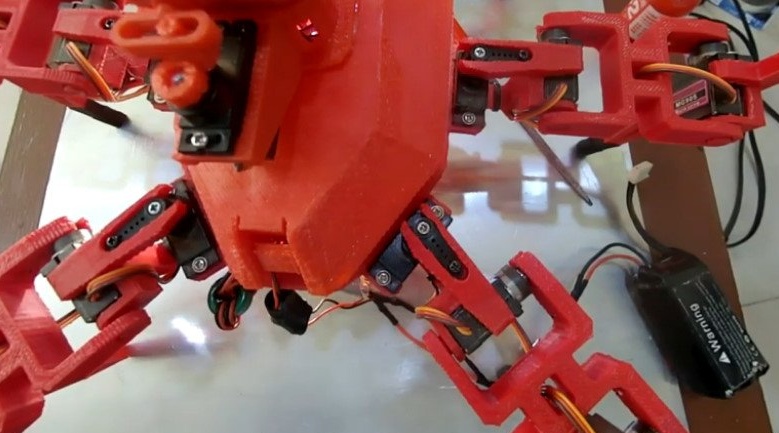
Nag-install ang master ng mga servo sa mga kasukasuan ng mga binti ng spider. Sa kabuuan, ang robot ay may anim na binti at tatlong servo sa bawat binti.








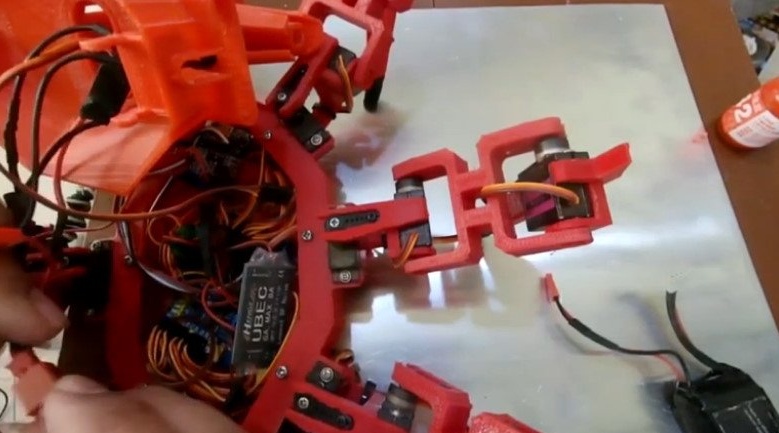
Mga pag-install ng mga servo sa platform ng chassis.




Pinapagana ang mga unang kasukasuan ng mga binti sa mga servo ng platform.




Ang mga wires ay nakuha sa mga teknolohiyang butas at konektado sa controller.





Mga pag-install ng stubs.


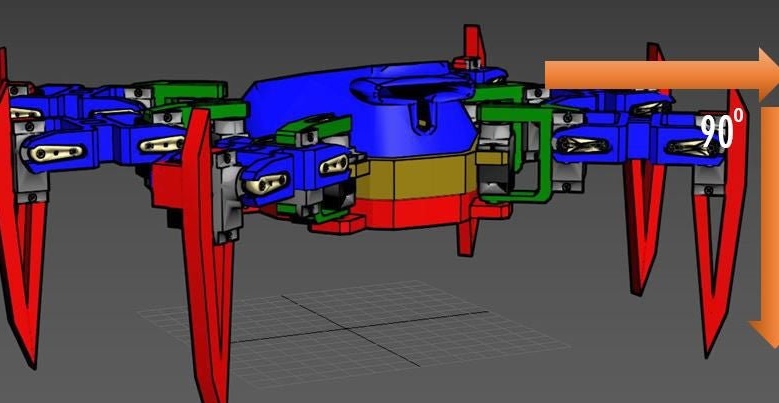
Itinataguyod ang pangalawang mga kasukasuan ng mga binti. Kumokonekta sa mga wire mula sa servos hanggang sa controller.






Nag-install ng ikatlong pinagsamang. Gamit ang kasukasuan na ito, ang spider ay darating laban sa ibabaw kapag lumilipat.



Kumokonekta at sinusuri ang operasyon ng bawat servo drive.



Kung ang lahat ay karaniwang inaayos ang mga wire na may mga kurbatang, mai-install ang baterya at isinasara ang takip.



Ang proseso ng pagbuo ay makikita sa video.
Hakbang Tatlong: Tungkol sa elektronika
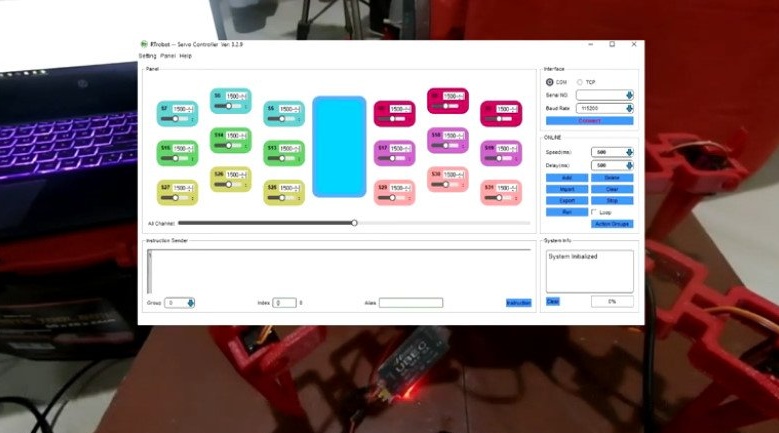
Ginamit ng wizard ang RTrobot servo controller upang makontrol ang mga paggalaw. Maaaring ma-download ang programa ng pamamahala dito o dito.
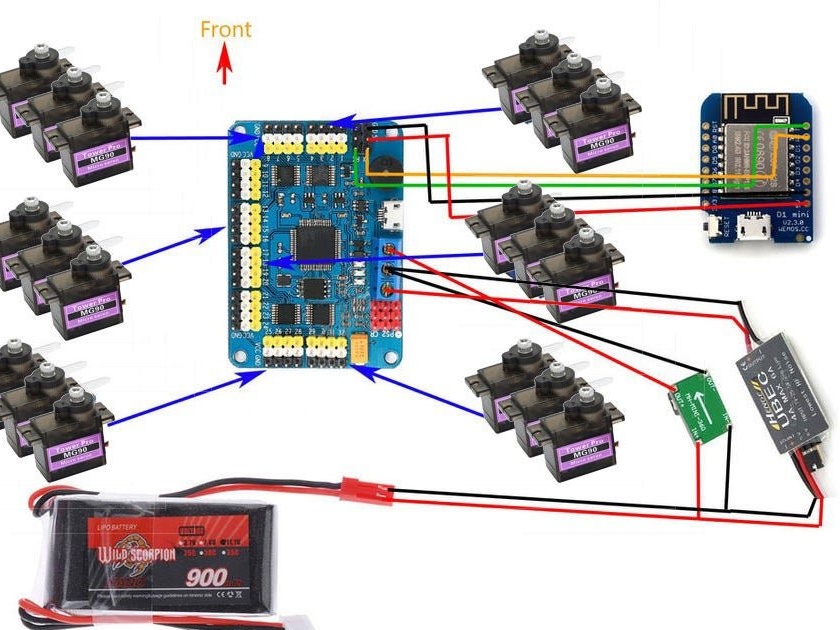
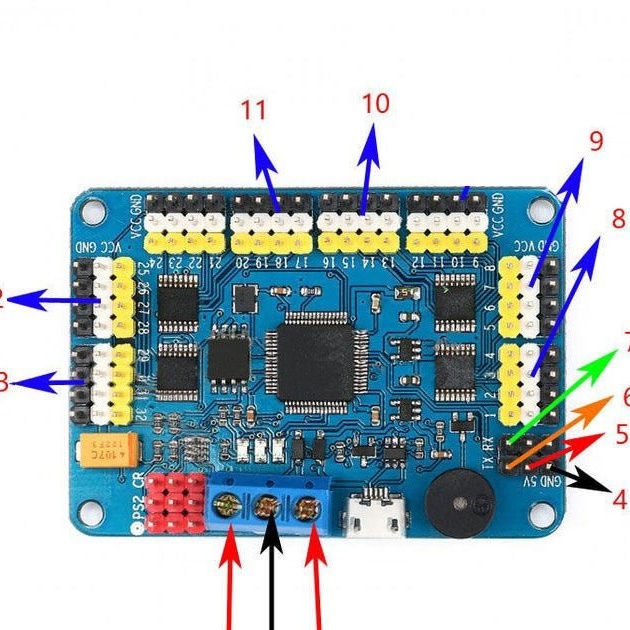
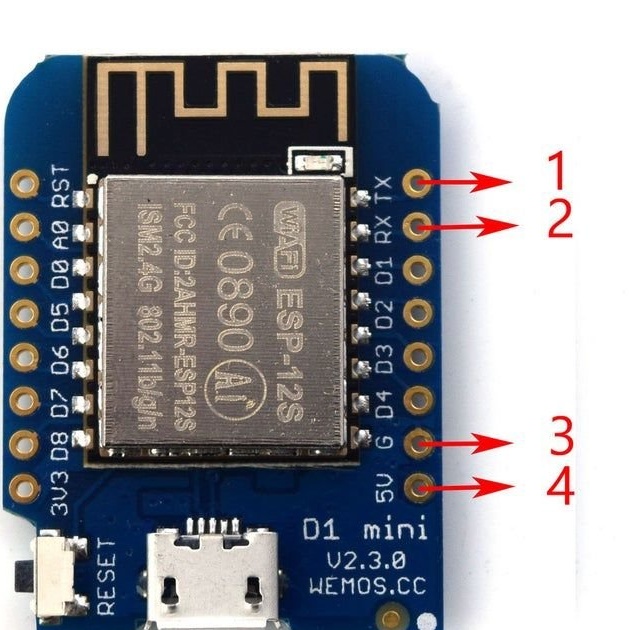
Ang lahat ay konektado tulad ng mga sumusunod:
1. 5V (+) UBEC output
2. Daigdig mula sa UBEC at buck converter
3. 5 V supply ng kuryente (+) mula sa converter
4.on ang Wemos D1 mini G pin
5. sa Wemos 5v
6. sa Wemos D1 RX
7. Wemos TX
Ang mga drive ng servo ay konektado sa mga pin 8 hanggang 13.
I-install ang code sa NodeMCU. Maaari mong i-download ito dito.
Ang WeMos D1 mini ay ang minimum na ESP8266 Wi-Fi card.
Gamit ang wemos D1 mini bilang isang access point ng WIFI, maaari kang magpadala ng isang serial na utos sa servo controller. Ang kailangan lamang ay upang i-flash ang nodeMCU board na may code, at maaari mong ikonekta ang smartphone sa nodeMCU AP. Pagkatapos, gamit ang isang web browser, pumunta sa http://192.168.4.1.
Mahalaga ito.
kapag binuksan mo ang servo, ang lahat ng mga servo ay lilipat sa orihinal / pamantayang posisyon
i-install ang servos nang tumpak hangga't maaari, tulad ng ipinapakita sa figure sa itaas o sa video
ayusin ang posisyon ng mga kasukasuan, i-off ang aparato at muli upang matiyak na ang lahat ng mga binti ay nasa tamang posisyon
kung ang mga kasukasuan ay kumapit, kuskusin, ayusin ang posisyon.
Hakbang Apat: Ang Tore
Ngayon lumiliko kami sa pagpupulong ng tower.
Una, ang mga detalye ng tower ay kailangang mai-print. Maaari kang mag-download ng mga file sa ito ang link.
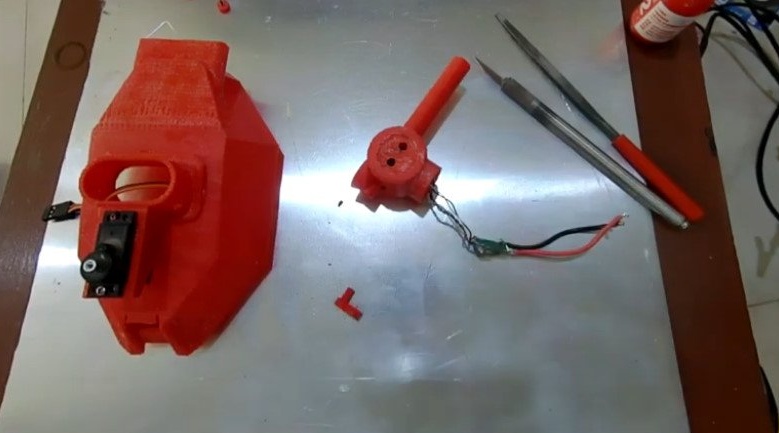
Pagkatapos ang master ay nagpatuloy upang tipunin ang tore. Ang circuit para sa pag-on ng tower at pagkonekta sa mga de-koryenteng bahagi ay nasa ibaba.
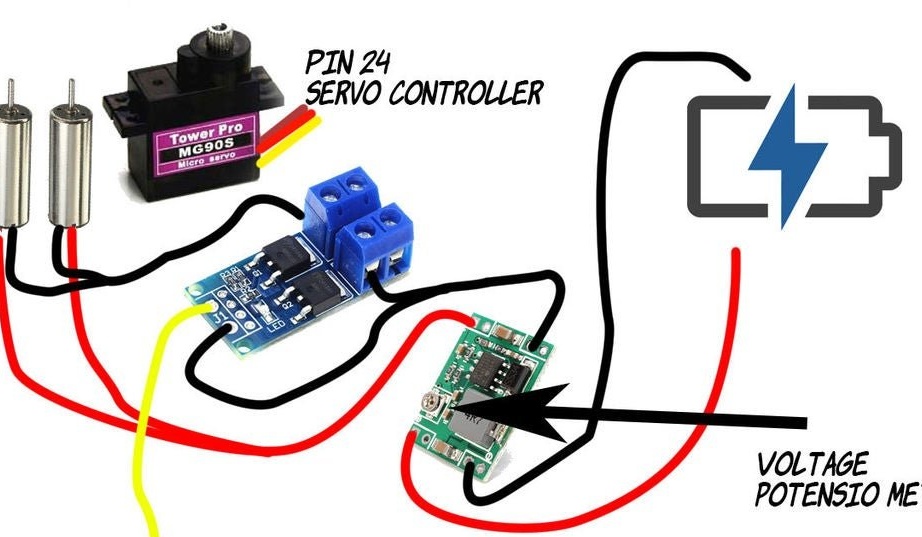
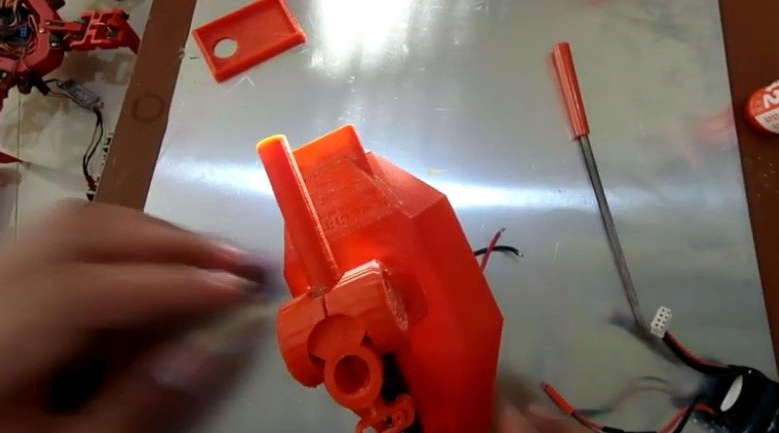
Nag-install ng isang servo sa tore.







Ang dobleng panig na tape ay dumidikit sa mga roller.


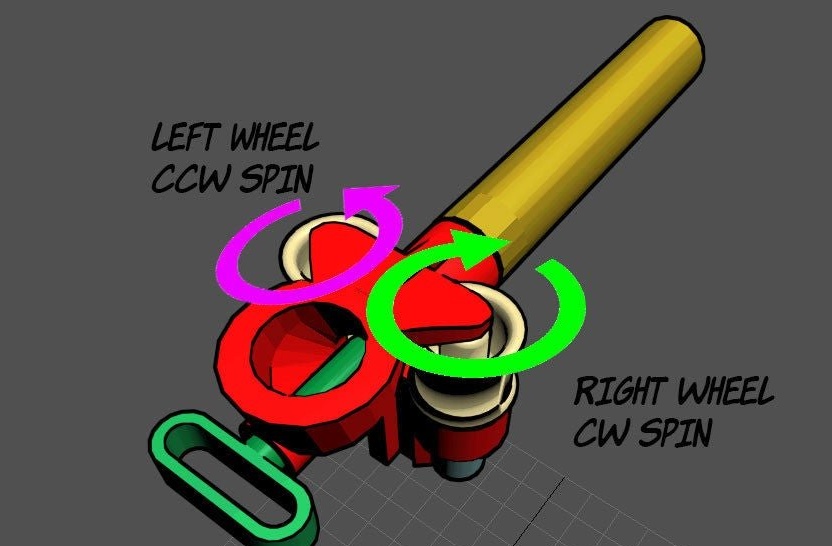
Nangongolekta ng isang baril. Nag-install ng motor sa isang may hawak. Mga pag-install ng mga roller sa mga shaft ng motor.







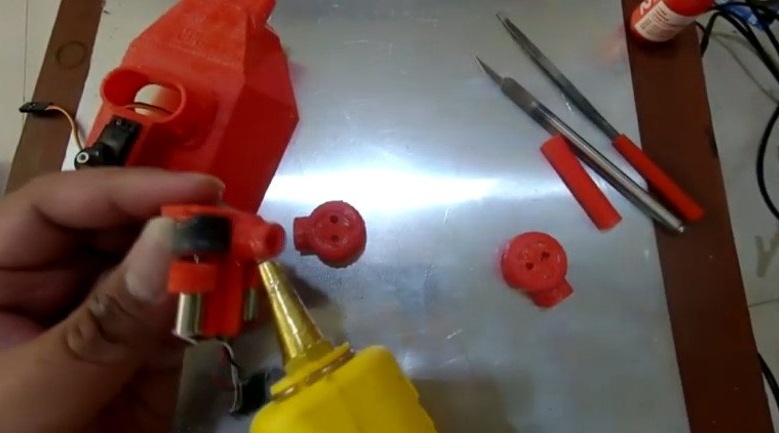
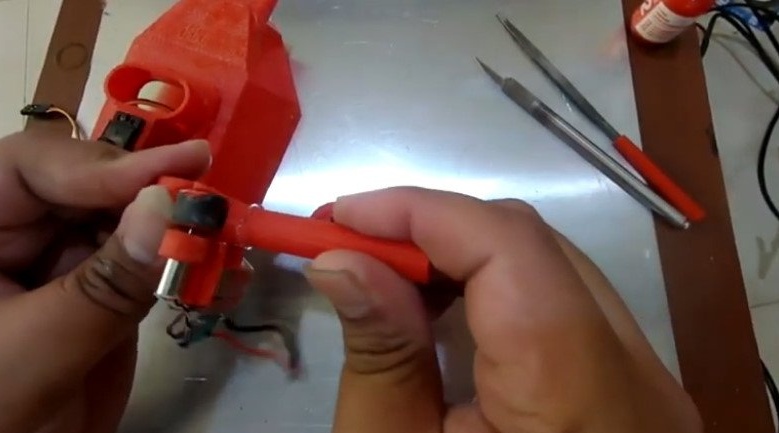

Ikokonekta ang mga wire at kinokolekta ang tower.




Naglo-load ng mga shell at sinusuri ang operasyon ng baril. Ang mekanismo ay maaaring nababagay sa pamamagitan ng paglipat ng may-hawak sa baras ng servo.


Ginagawa nito ang pangwakas na koneksyon, pagpupulong at inspeksyon.
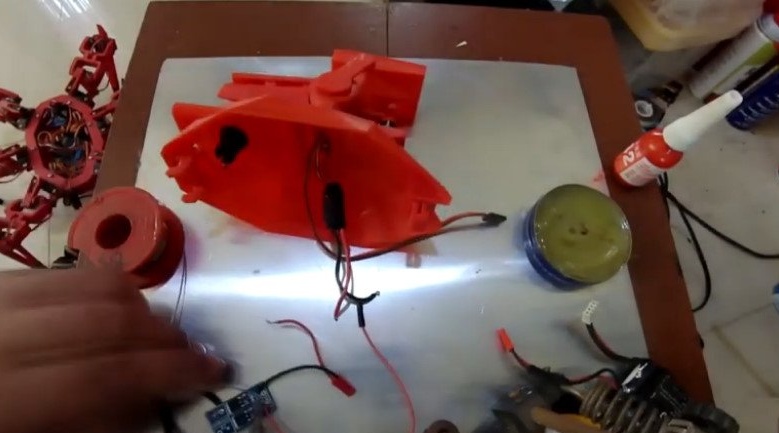




Ang video kasama ang pagpupulong ng tower ay makikita sa ibaba.
Handa na ang lahat. Ipunin ang isa pa tulad ng robopauk at maaari mong ayusin ang mga away.
