Ang Carpet Crawler ay isang maliit na robot na kabilang sa klase ng BEAM. Ganyan mga robot agad na isama ang dalawang tulad na mga elemento tulad ng aesthetics, biology, elektronika at mekanika. Salamat sa pamamaraang ito, ang gayong mga robot ay ginagaya ang mga nabubuhay na nilalang hangga't maaari, kung minsan ay tila naiisip nila.
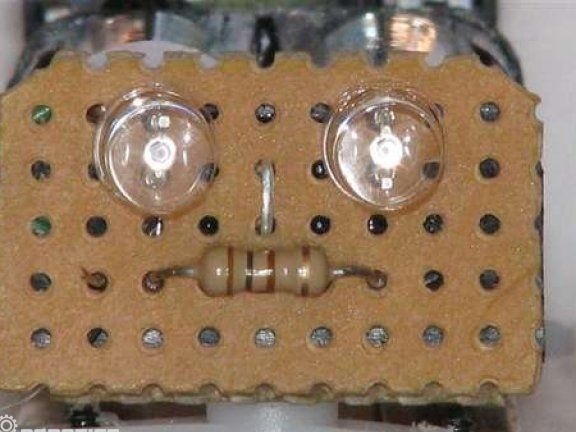
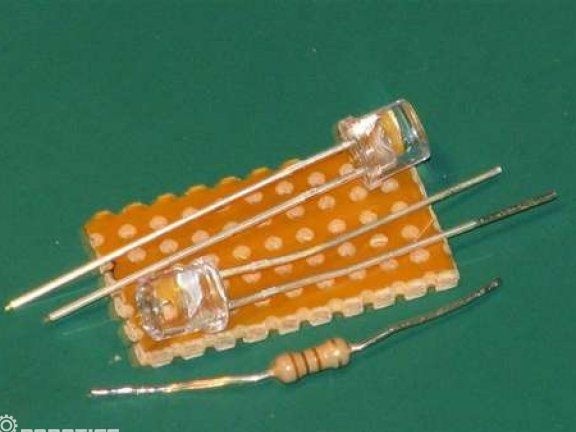
Bilang isang utak para sa mga tulad ng mga robot na nagpapatawad sa mga sensor at ginagamit ang mga switch, at gumagalaw gawang bahay dahil sa servomotor. Ang mga baterya ng AAA ay ginagamit bilang kapangyarihan. Tulad ng mga mata na nagliliyab nang maliwanag, dalawang mga LED ang naka-install.
Mga materyales at tool para sa pagmamanupaktura:
- tanso na may sukat na 1/32 "x 1/4" x 8 ",
- dalawang piraso ng mga tanso na tanso;
- M2 nuts at bot;
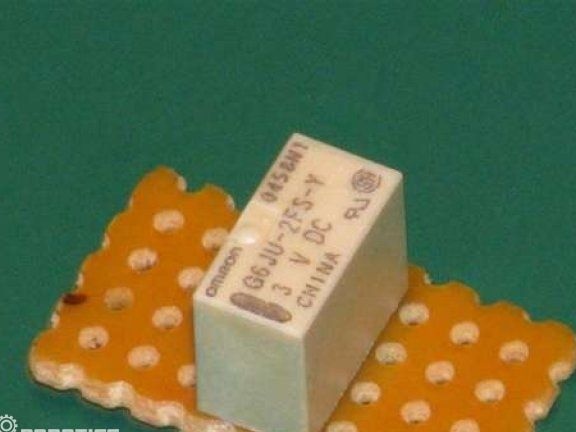
- servomotor (Micro RC (7.5 g));
- dalawang microswitches (maaaring makuha mula sa mga dating drive);
- dalawang LED (pinakamahusay na gumamit ng pula, dahil ang puti o asul sa kasong ito ay maaaring gumana);
- isang 100R risistor (kung ang mga LED ay dilaw o berde, pagkatapos ay 47R);
- dalawang baterya ng AAA at isang may hawak para sa kanila;
- manipis na mga kable.




Proseso ng paggawa
Unang hakbang. Pagbabago ng servomotor
Ang servomotor ay dinisenyo sa isang paraan na sa panahon ng operasyon ay ginagawang impulsive na paggalaw. Sa kasong ito, kinakailangang maibalik muli upang gumana ito sa pag-ikot. Mayroong dalawang mga paraan upang gawin ito.
Sa unang kaso, maaari mong mai-save ang bilis at direksyon mula sa control ng engine, pati na rin ang control electronics. Kakailanganin pa ng aparato ang papasok na pulses upang gumana.
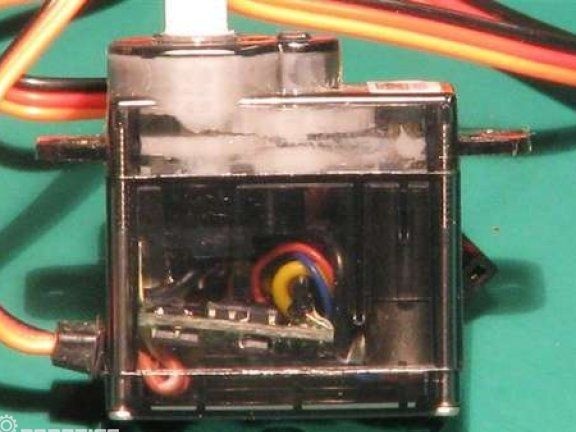
Nagpunta ang may-akda sa iba pang paraan. Ito ay kinakailangan upang putulin ang stop element ng mga gears. Pagkatapos ang mga gears ay dapat na may linya, ito ay mahirap na tipunin ang mga ito pabalik kung nawala ang pagkakasunud-sunod. Kapag nag-disassembling, ang ibabaw ng servomotor ay dapat na lubricated na may silicone grasa.
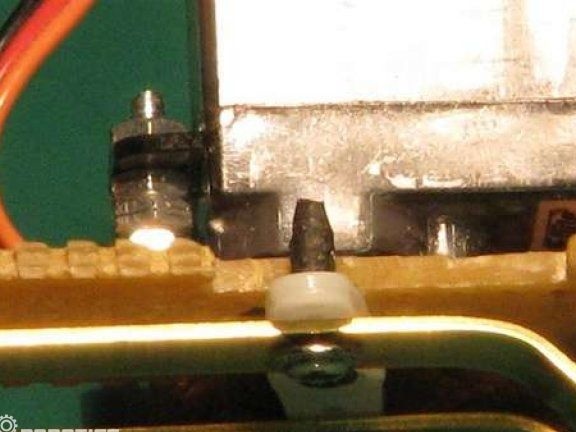
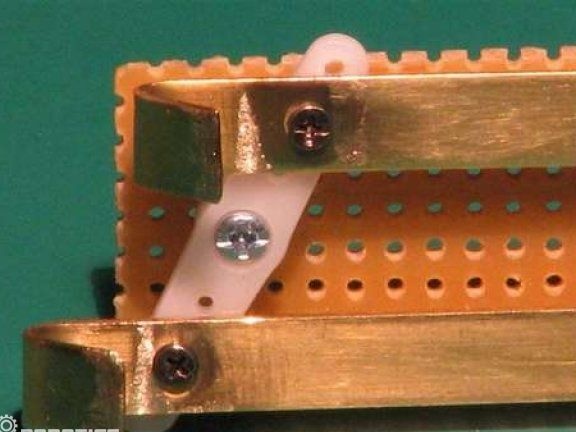
Ipinapakita ng larawan ang mekanismo ng kontrol ng RSV na kailangang ilipat.

Matapos alisin ang board, ang pulang wire ay dapat na lumipat sa eksaktong red red ng motor. Ang mga wire ay dapat na maingat na balot ng electrical tape upang maiwasan ang maikling circuit.

Hakbang Dalawang Lumikha ng mekanikal na bahagi
Sa board ng trabaho, kailangan mong mag-drill ng maraming mga butas at pagkatapos ay i-install ang relay sa likod ng baterya.Para sa pag-mount ng servo drive, ginagamit ang 2 mm bolts.
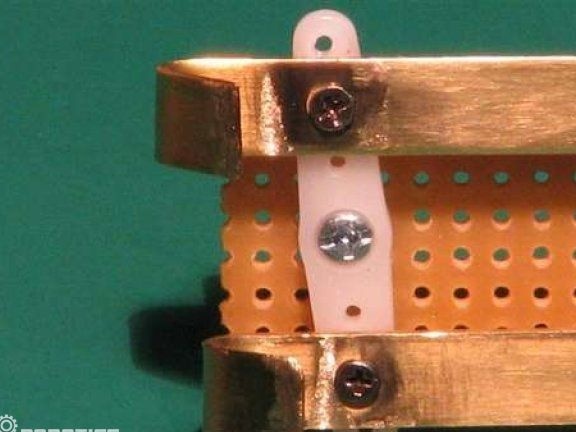
Ang mga binti ng robot ay gawa sa solidong mga plate na tanso, para sa mga ito ay una silang pinutol sa mga piraso ng isang naibigay na haba at gumawa ng mga baluktot. Salamat sa naturang mga pagkukulang, ang robot ay kumapit sa kalsada at mag-crawl. I-fasten ang plate na may maliit na screws.


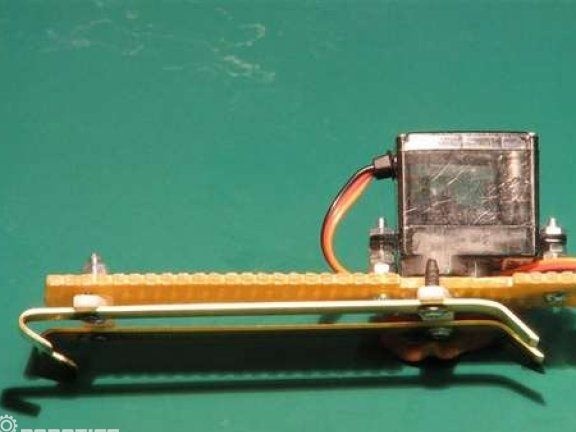
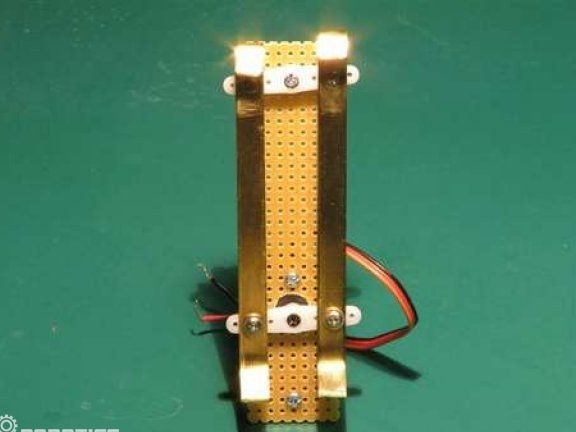
Upang makontrol ang mga binti kailangan mong itakda ang mga switch. Nakakabit sila sa servomotor na may pandikit.
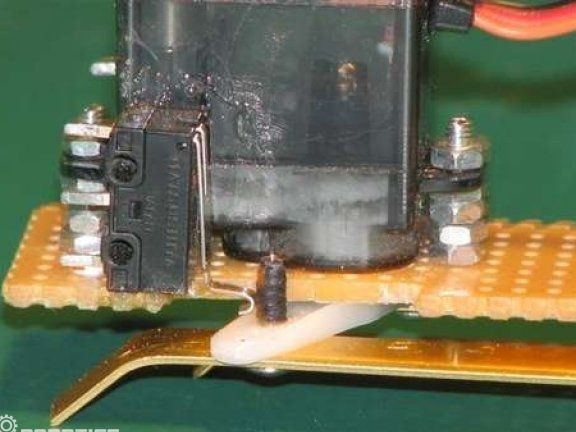
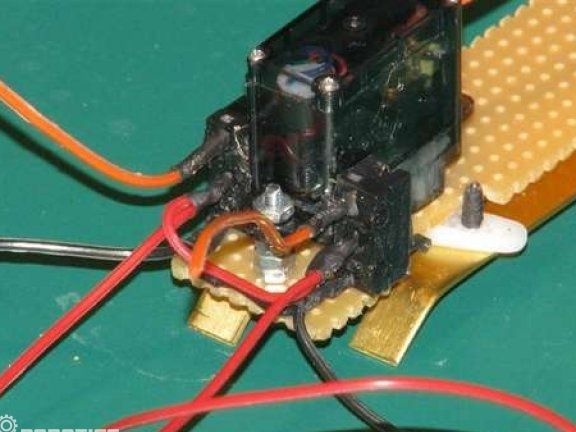
Hakbang Tatlong Robot electronic circuit
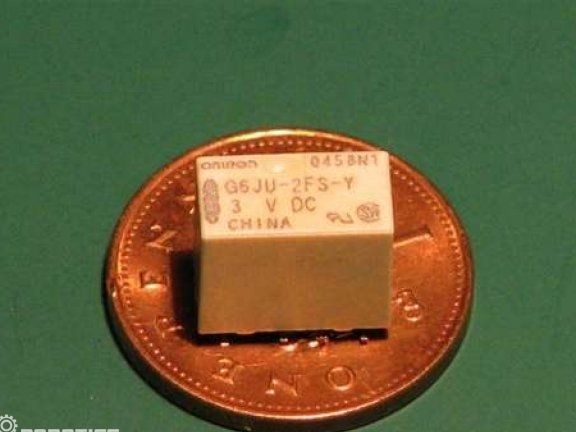
Ang pangunahing sangkap sa gawain ng lutong bahay ay maaaring isaalang-alang ng isang relay-latch, na gagana kapag hindi naka-disconnect mula sa coil. Ang relay ay magbabago ng paggalaw, ngunit mananatili ito sa isang lugar hanggang sa susunod na pagliko.
Ang mga pulses papunta sa coils ay magmumula sa dalawang microswitches, tatalikuran nila kapag tatama ang switch ng antena.

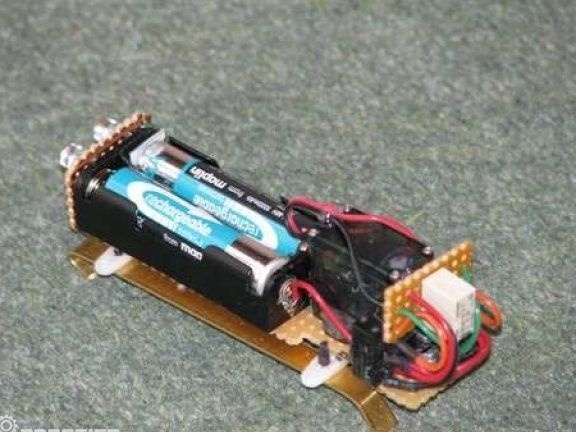
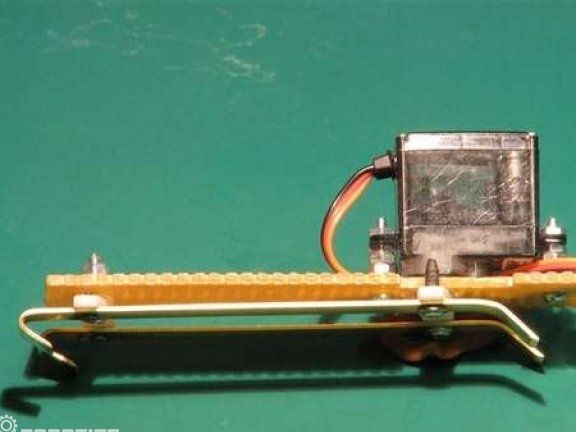
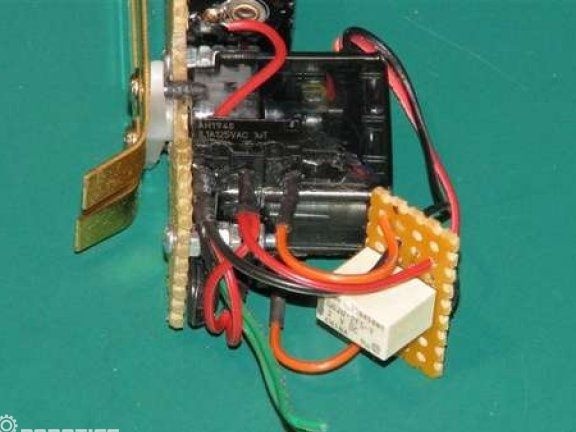
Hakbang Apat Assembly ng elektronikong bahagi
Ang relay ay naka-mount sa isang scrap sa isang plato, kaya't pinakamadali na kumonekta. Ang buong proseso ng pagkonekta ng mga electronics ay ipinapakita sa larawan.





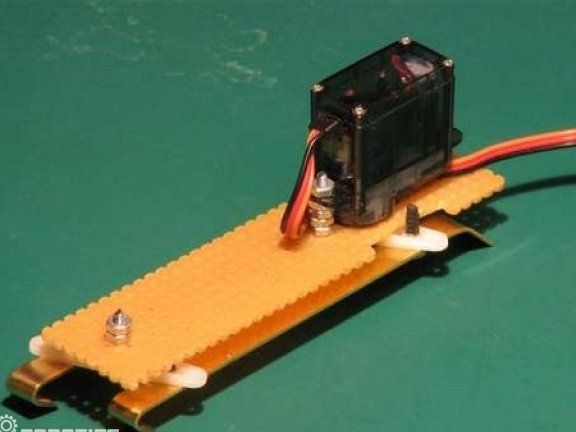
Iyon lang, ngayon handa na ang robot. Pinakamaganda sa lahat, makikita niya ang kanyang sarili sa ibabaw ng karpet, dahil partikular na idinisenyo ito para sa mga nasabing lugar. Una, ang robot ay dapat sindihan ang mga LED, at pagkatapos ay mabagal itong mag-crawl sa sahig.