
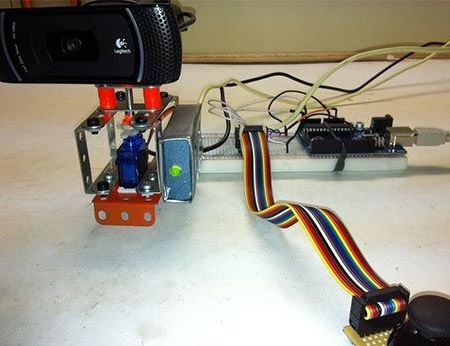
Tatalakayin ng artikulong ito kung paano gamitin Arduino maaaring makontrol ang webcam. Mas tiyak, ang kontrol ay magiging isang servo drive, na naka-install sa frame mula sa taga-disenyo kung saan ang webcam ay mai-mount.
Mga materyales na ginamit ng may-akda upang lumikha ng aparatong ito:
1) tagabuo ng metal
2) malamig na hinang
3) webcam
4) servo
5) LEDs
6) Arduino
8) joystick mula sa PS3
Isaalang-alang nang mas detalyado ang disenyo at pangunahing mga punto ng paglikha ng isang aparato para sa pagkontrol sa camera.
Nakapagtataka sa tanong kung paano gamitin ang tulad ng isang maginhawang platform Arduino bilang karagdagan sa mga karaniwang pag-andar tulad ng mga kumikislap na ilaw. Kapag ang isang pag-uusap sa pamamagitan ng Skype sa isang kasamahan sa trabaho, ang may-akda ay may isang kawili-wiling ideya. Paano kung bibigyan mo ng pagkakataon ang kanyang mga kasamahan na kontrolin ang isang webcam at panoorin kung ano ang nangyayari sa opisina. Walang masabi na sinabi kaysa sa tapos na, at ang may-akda ay nagsimulang magtrabaho sa pagpapatupad ng ideyang ito.
Sa una, pinag-aralan ng may-akda ang mga pangunahing materyales ng mga artikulo kung saan ginamit ang isang joystick upang makontrol ang mga yunit na nilikha sa platform ng Arduino. Nakarating na maunawaan ang materyal ng mga artikulong ito, natanto ng may-akda na maaari niyang gamitin ang lumang galak ng galak mula sa PS3 upang kontrolin ang mga paggalaw ng servo mula sa kanya.
Simula sa pagbuo, nagpasya ang may-akda na bumuo ng isang frame kung saan ang servo drive at ang camera mismo ay ilalagay. Upang hindi kumplikado ang gawain, nagpasya ang may-akda na gamitin ang karaniwang konstruktor ng metal, na binili niya sa isang tindahan ng pag-ibayo.
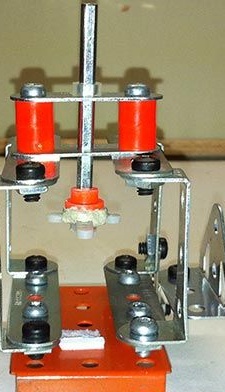
Kinuha ang mga detalye ng konstruksyon na ito, lumitaw upang lumikha ng tulad ng isang frame ng hinaharap na aparato:
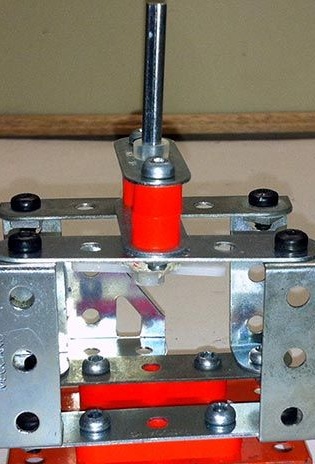
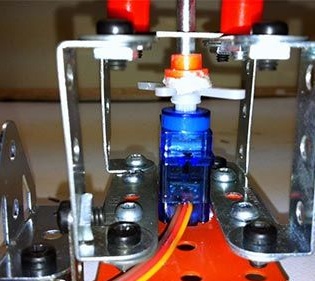
Ang isang servo drive ay na-install sa loob ng frame. Tulad ng nakikita mula sa larawan, perpektong akma sa nilikha na frame. Upang ayusin ang servo sa frame, ginamit ng may-akda ang double-sided tape. Gamit ang malamig na welding, ang servo shaft ay konektado sa gear, na kinokontrol ang paggalaw ng platform gamit ang camera.
Mahalagang tiyakin na ang disenyo ng paghahatid ay ginawa kahit na walang kinakailangang pag-load.
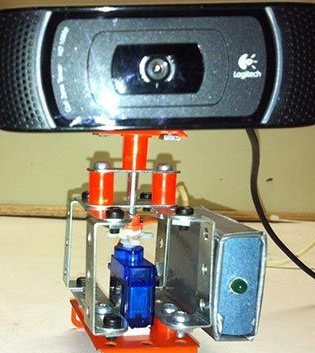
Pagkatapos ay sinimulan ng may-akda na mai-install ang webcam. Ang isang Logitech camera ay ginamit, na ginagamit sa opisina ng kumpanya kung saan gumagana ang may-akda. Samakatuwid, dahil sa ang katunayan na ang camera ay hindi nabibilang sa may-akda, hindi niya ito pinakawalan at tinanggal ang counterweight, bagaman ito ay gawing simple ang disenyo ng hinaharap na aparato.

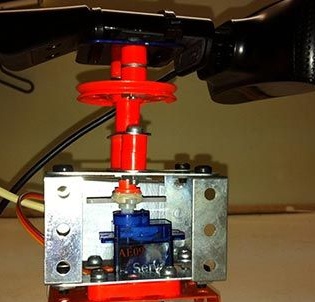
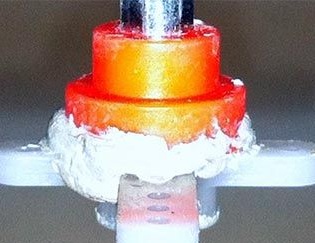
Upang kahit papaano mabayaran ang bigat ng camera at ipamahagi ito sa gitna ng istraktura, ginamit ng may-akda ang 2 makapal na gasolina. Pinapayagan ka nitong ilipat ang bigat ng silid mula sa servo shaft hanggang sa pangunahing frame, at maiwasan din ang presyon ng baras sa silid mismo.
Ang camera ay naka-mount sa isang espesyal na platform ng pag-ikot, na batay sa isang baras na nagmula sa servo drive. Sa ganitong paraan, ang kontrol sa camera ay natanto sa pamamagitan ng isang paghahatid ng krus.
Matapos handa ang mekanikal na bahagi ng istraktura, kinuha ito ng may-akda e pagpupuno.
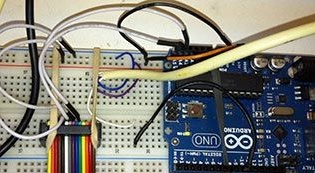
Upang magsimula, nagpasya siyang ikonekta ang mga servo at LED na magpapakita ng katayuan ng system.
Ang servo mismo ay may 3 wires: -GND, + 5V at Signal. Gumamit ang may-akda ng 9 pin upang mapagtanto ang kakayahang makontrol ang drive. Upang makagawa ng isang tagapagpahiwatig ng paganahin ng drive, ang may-akda ay naka-install ng isang diode na konektado sa dalawang wires: + 5V at GND na may risistor sa + 5V na linya.

Pagkatapos, batay sa mga artikulo sa Internet, inihanda ng may-akda ang isang sirang galak mula sa PS3 upang makontrol ang drive.

Pagkatapos ay kinuha ng may-akda ang isang programa para sa Arduino, salamat sa kung saan posible itong gumamit ng joystick at USB port upang makontrol ang servo. Upang makipag-usap sa isang USB port, ginamit ng may-akda ang control modem at isang application terminal emulator tulad ng Minicom o Putty.
Ang program na ito ay nagbibigay ng maraming mga pag-andar para sa pagkontrol sa camera.
Upang mai-install ang camera sa gitna ng 90 degrees, dapat mong pindutin ang "m", awtomatikong darating din ang camera sa posisyon na ito kapag naka-on ang lakas ng servo. Upang paikutin ang camera sa kaliwa, kinakailangan upang pindutin ang key na "F", at sa pamamagitan ng pagpindot sa pindutan ng "J", ang kamera ay pinaikot sa kanan.
Maaari mong i-download ang programa sa dulo ng artikulo.
Yamang ang akda ay hindi partikular na naisakatuparan ang disenyo para sa aparato ng pag-ikot ng camera, nagsimula itong magkaroon ng isang bilang ng ilang mga kawalan.
Halimbawa: dahil ang camera ay hindi naayos sa frame, kapag ikiling, maaari itong mahulog mula sa platform; yamang ang servo ay medyo maliit, ang metalikang kuwintas ng camera ay lumilikha ng karagdagang pag-ikot, na kung saan, pinapagana ang servo; ang mga butas para sa servo shaft ay napakalaking, kaya hindi ito static at napapailalim din sa stress.
Samakatuwid, sa hinaharap, nais ng may-akda na bahagyang i-upgrade ang aparato tulad ng sumusunod: siguraduhin na ang pag-ikot ng camera ay kinokontrol ng mga arrow ng joystick, at hindi sa pamamagitan ng mga pindutan; magaan ang pag-load sa servo kapag ang pag-cornering.