

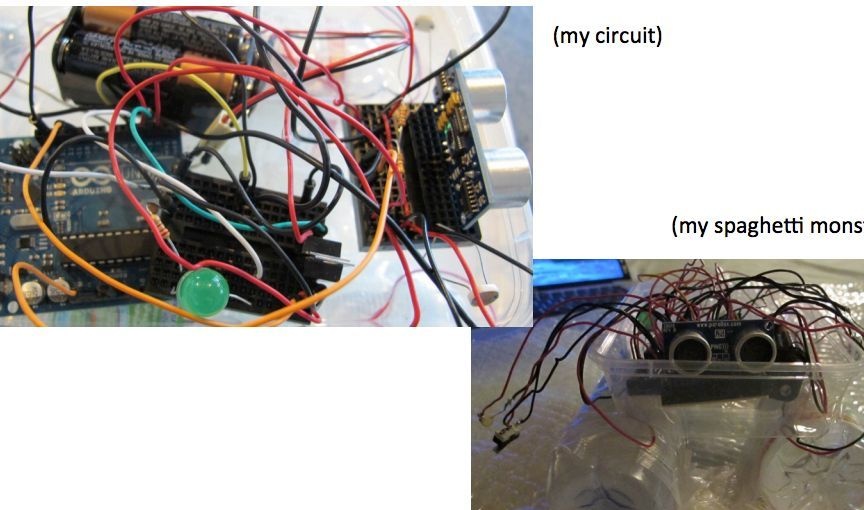
Ang may-akda batay sa proyektong ito sa isang mas simpleng bersyon. gawang bahay mga bangka, at perpekto ito. Ang mga sensor ay inilalagay sa bangka upang maiwasan ang mga hadlang at lumipat sa ilaw. Paano ginagamit ang Controller sa bangka Arduino, ang isang sensor ng ultrasonic ay naka-install sa harap, at ang mga light sensor ay matatagpuan sa mga gilid. Ang simpleng bangka na ito ay hindi bumagsak sa mga dingding, at kinokontrol ng isang flashlight.
Mga materyales at tool:
- Insulating tape / malagkit na tape
- Thermoglue na may mainit na pandikit
- DC motor 2 mga PC
- Mga plastik na bote ng 2 mga PC
- mga wire
- Maliit na mga propellers 2 mga PC
- Arduino, computer at USB cable
- kahon ng plastik
- 9V baterya at konektor
- Mga Power diode (type 1N4004)
- Mga Resistor
- Transistor MOSFET o TIP 120
- Dalawang photocells at dalawang pindutan
- gunting
- Solder na may isang paghihinang bakal

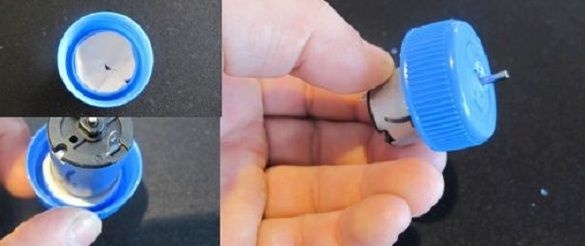
Hakbang 1. Pag-install ng mga makina.
Ang mga tambo ay tinanggal mula sa mga bote at isang butas ay ginawa sa bawat isa sa kanila. Sa loob ng takip, pinipilit ng may-akda ang mainit na pandikit nang hindi isinara ang mga butas. Inilagay niya ang motor shaft sa butas at inilagay sa pandikit. Matapos malunod ang pandikit, malaya ang pag-ikot ng baras. Ang parehong pamamaraan ay nangyayari sa pangalawang takip.
Hakbang 2. Paglakip sa mga bote.
Ang mga bote ay pinahigpitan ng alituntunin ng isang raft sa tulong ng tatlong piraso ng malagkit na tape.

Hakbang 3. Pagbebenta sa mga makina.
Dahil ang mga makina na naka-mount sa mga plug ay walang mga wire, kinakailangan upang maibenta ang mga ito, ang haba ng mga wire ay mga 25-30 cm.

Hakbang 4. Ang hiwa sa mga bote.
Upang ang mga wire ay mahulog sa katawan ng barko, isang maliit na puwang ang ginawa mula sa kanilang itaas na bahagi.

Hakbang 5. Pag-secure ng mga motor.
Bukod dito, pinipilipit ng may-akda ang mga lids sa mga bote, dahil hindi sila nag-twist nang maayos; kailangan kong gumamit ng mainit na pandikit. Ang mga wire ay itinulak sa pamamagitan ng mga inihandang butas sa mga bote.

Hakbang 6. Kaso.
Ang isang plastic box ay nakadikit sa dalawang bote. Sa kapasidad na ito para sa electronics, maaari kang gumawa ng mga butas para sa mga wire, o hawakan ang mga wires sa likod ng kahon. Ang mga butas para sa mga wire sa mga bote ay insulated na may mainit na matunaw na malagkit.

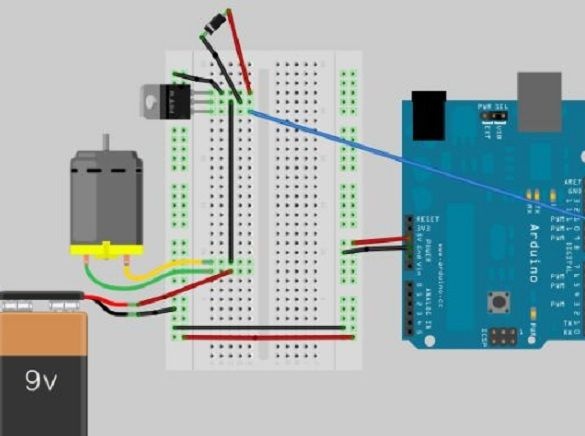
Hakbang 7. diagram ng mga kable.
Gumagamit ang circuit ng isang TIP 120 transistor bilang isang switch (maaari mong gamitin ang katulad na MOSFET o Darlington transistor). Ginagamit ito upang ilipat ang pagkarga kapag kumonsumo ng isang malaking halaga ng kasalukuyang, dahil ang Arduino ay walang sapat na kapangyarihan para sa mga motor. Ang circuit na ito ay tipunin para sa una at pagkatapos para sa pangalawang engine (ang isa pang baterya ay hindi kinakailangan para sa pangalawang engine).
Hakbang 8. Mga Sensor.
Ang sensor ng ultrasonic ay mahusay para sa harap ng bangka, binabalaan ang mga hadlang sa daan. Ang mga Photocells ay kumikilos tulad ng mga antenna at ginagamit upang gawing lumulutang ang ilaw sa ilaw.Ang mga pindutan sa panig ay ginagamit bilang mga sensor ng balakid. Maaari mo ring baguhin ang code at gumamit ng iba pang mga sensor, tulad ng infrared.

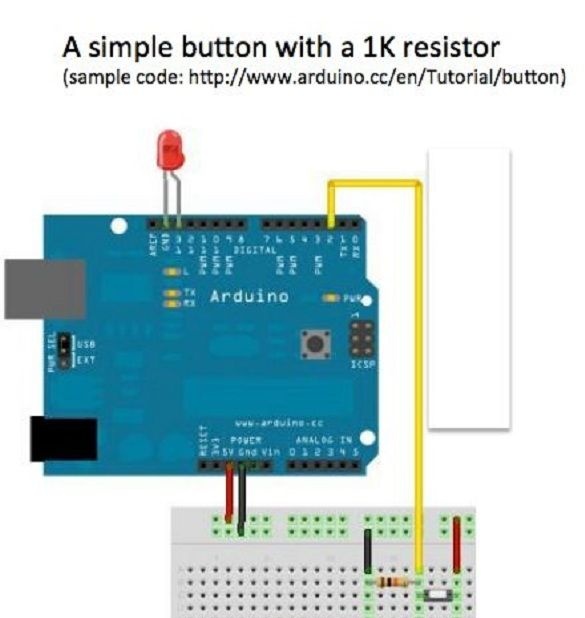
Hakbang 9. Mga pamamaraan para sa mga sensor.
Ipinapakita ng diagram ang koneksyon ng isang simpleng pindutan at isang risistor ng 1. Ang pamamaraan para sa parehong mga pindutan ay paulit-ulit, ang mga pindutan ay inilalagay sa magkabilang panig ng bangka. Mananagot sila sa pagbabago ng paggalaw ng bangka sa isang pagbangga.
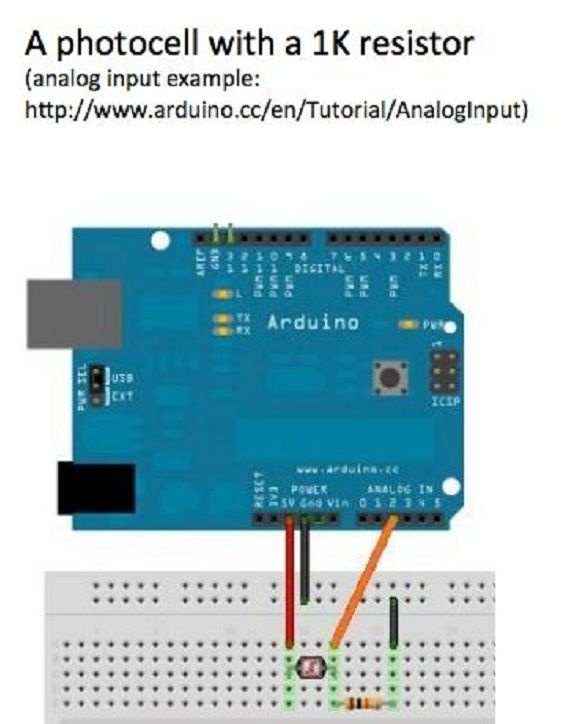
Ang sumusunod na figure ay nagpapakita ng isang circuit na may isang 1K risistor at photocell. Ginampanan ito ng may-akda ng 2 beses at inilagay ang mga photocells sa tapat ng mga bangka.
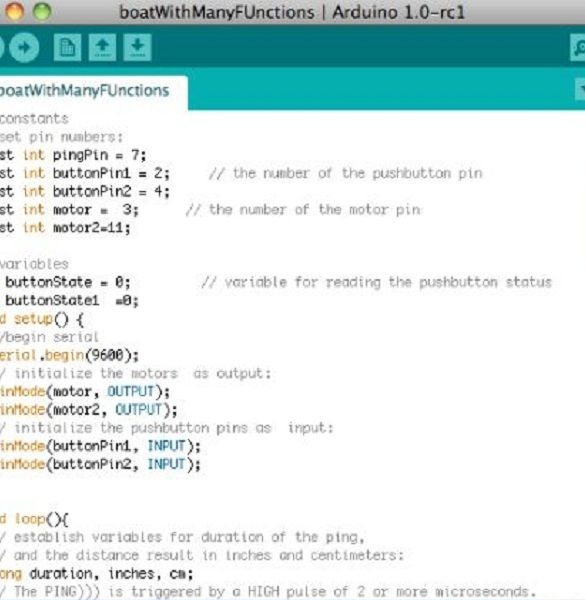
Hakbang 10. Code ng programa.
Nagbigay ang may-akda ng pagkakataon na i-download ang code nito para magamit, at sa gayon ay nagbibigay ng pangunahing pag-andar para sa mga magtitipon ng naturang bangka. Kasama sa code ang suporta para sa mga photocells, rangefinder at mga pindutan. Ang bangka ay susubukan upang maiwasan ang mga hadlang sa harap ng kanyang sarili, at lumiliko sa kabaligtaran na direksyon kapag nakatagpo ito ng mga hadlang mula sa gilid. Kung walang pagnanais na gamitin ang buong hanay ng mga sensor, ngunit ang ilan sa kanila ay may code para sa bawat isa nang magkahiwalay. Maaari mong i-download ang lahat ng mga code sa ilalim ng artikulo.
Hakbang 11. Pagtitipon ng bangka.
Ang natipon na circuit, Arduino at baterya ay naka-box.
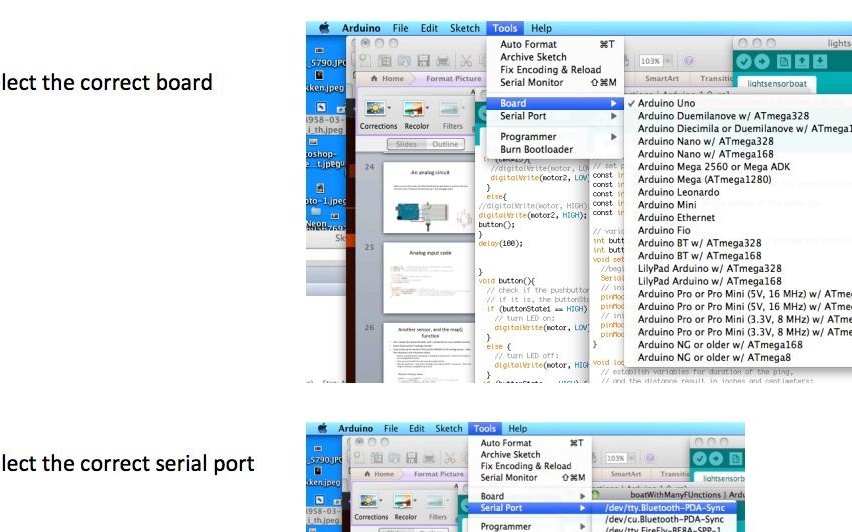
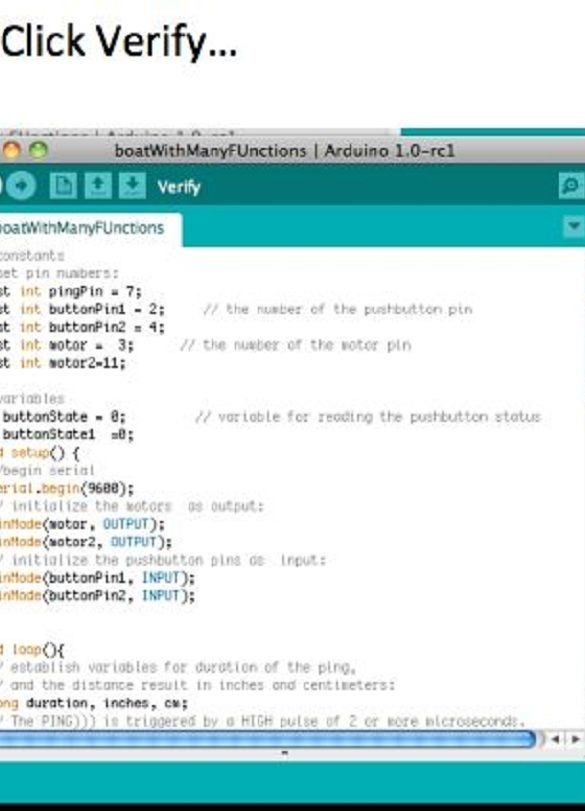
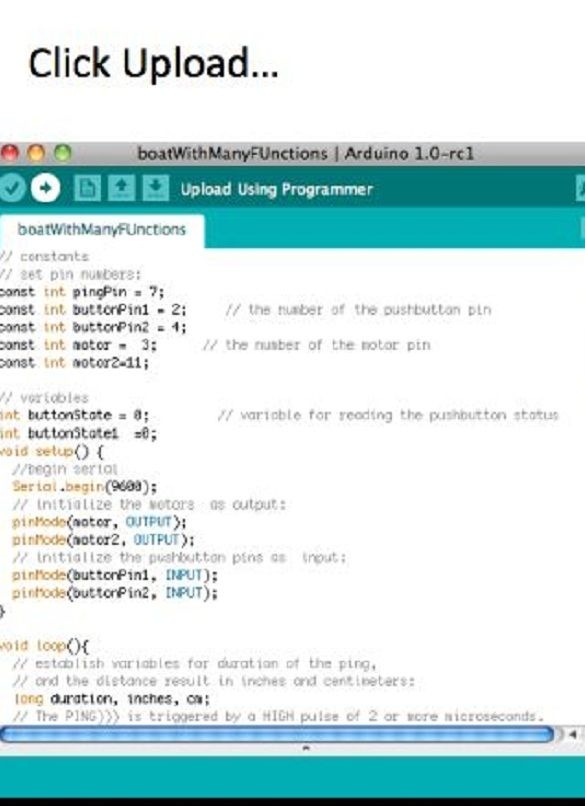
Hakbang 12. I-download ang sketch.
Susunod, bubukas ang Arduino IDE, na pumili ng tamang file at port, pagkatapos nito ay naipon at isinulat ng may-akda ang code sa controller.
Hakbang 13. Ang tubig ay lumalaban at pagsubok.
Karagdagang isinama ng may-akda ang lahat ng mga potensyal na lugar ng water ingress na may mainit na pandikit. Insulated din ang lahat ng mga wire mula sa maikling circuit. Ang lalagyan na may Arduino ay natatakpan ng parehong kahon at tinatakan ng de-koryenteng tape. Ang mga Propeller ay nakadikit sa mga motor. Narito handa na ang bangka, ngayon maaari mo nang simulan ang pagsubok sa tubig.



Video na may paunang pagsubok ng bangka: