


Kinuha ko ang bahagi ng aking disenyo mula sa mga tagubilin sa pagpupulong para sa Lego Technic 42029. Ang natitira ay ang aking improvisasyon. Kaya kailangan namin:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (mas mahusay kaysa sa Populus, ngunit posible rin ang isang katapat na Tsino)
- 2 servo ang nagtutulak sa SG-90
- Tanggap ng IR
- Motor gearbox 200 rpm
- 2 LEDs
- 2 resistors 150 ohms
- Capacitor 10v 1000uF
- 2 solong hilera ang sumali sa PLS-40
- 2 mga konektor ng PBS-20
- Inductor 68mkGn
- 6 na baterya NI-Mn 1.2v 1000mA
- Konektor ng tatay-nanay ng dalawang pin sa kawad
- Homutik
- Mga wire ng iba't ibang kulay
- nagbebenta
- Rosin
- kutsilyo ng kagamitan
- paghihinang bakal
- Bolts 3x40 at nuts at tagapaghugas para sa kanila
- Bolts 3x60
- Mga Baterya Ni-Mn 1.2v 1000mA 6pcs.
Hakbang 1 kinokolekta namin ang likod ng suspensyon.
Una, kailangan mong tipunin ang likod ng suspensyon ayon sa mga tagubilin ng Lego 42029 na bahagi 1, na nagsisimula sa 3 mga pahina at 8 kasama. Susunod, magdagdag ng ilang mga detalye upang maaari mong mai-install ang engine at gearbox.

Hakbang 2 sa harap ng pagsuspinde.
Pinagsama namin ang harap na bahagi ng pagsuspinde ayon sa mga tagubilin ng Lego 42029 na bahagi 1, mula pahina 21 hanggang 23. Kinukuha namin ang trapezoid mula sa pangalawang bahagi ng mga tagubilin sa Lego mula sa pahina 6 hanggang 11. Pinagsasama namin ang winch mula sa ikalawang bahagi ng pahina 14 - 22. At ang pangalawang bahagi ng bumper ay 34 -36 na mga pahina.
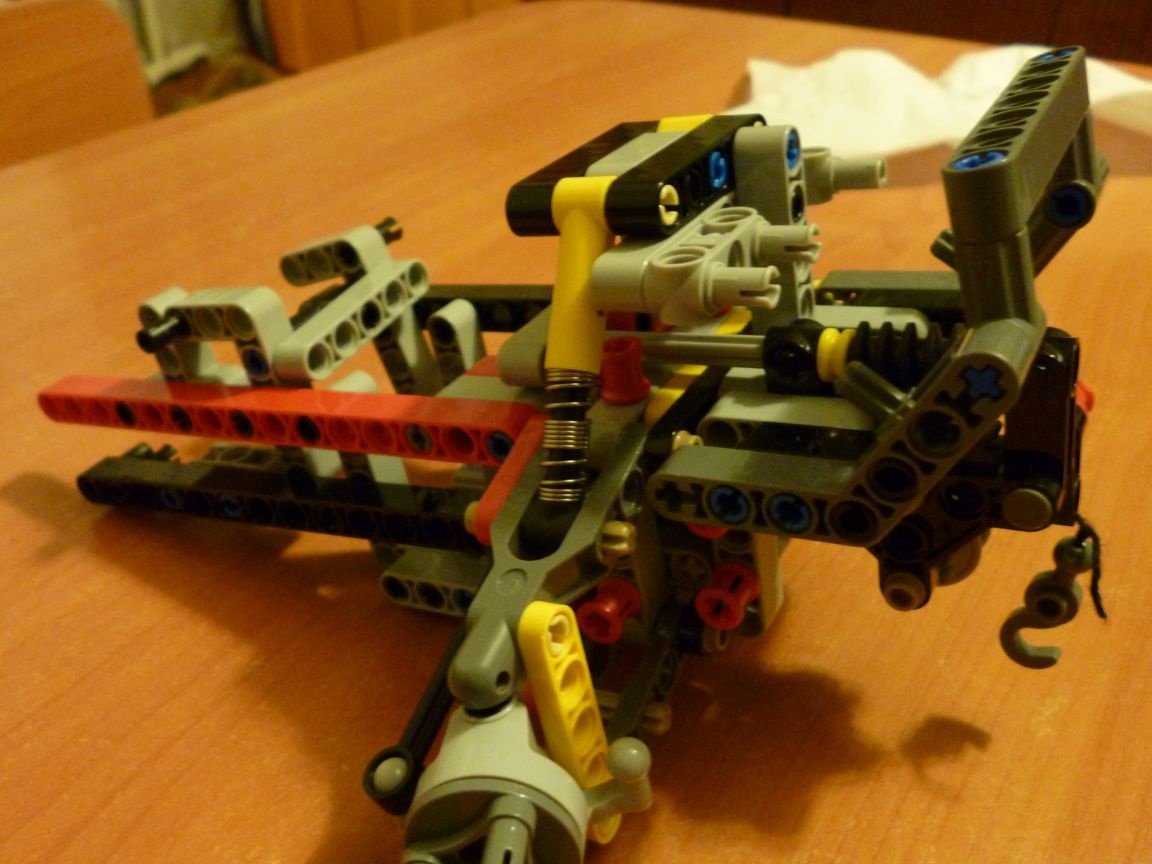
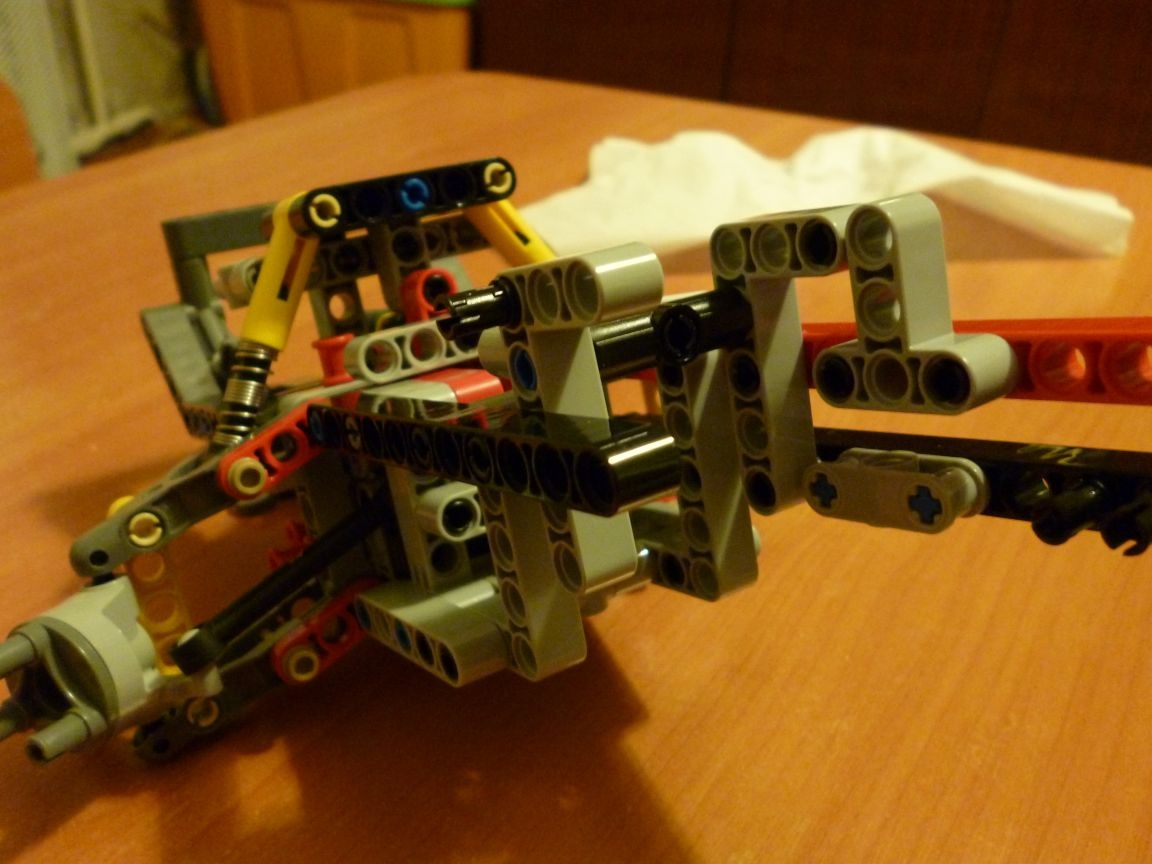
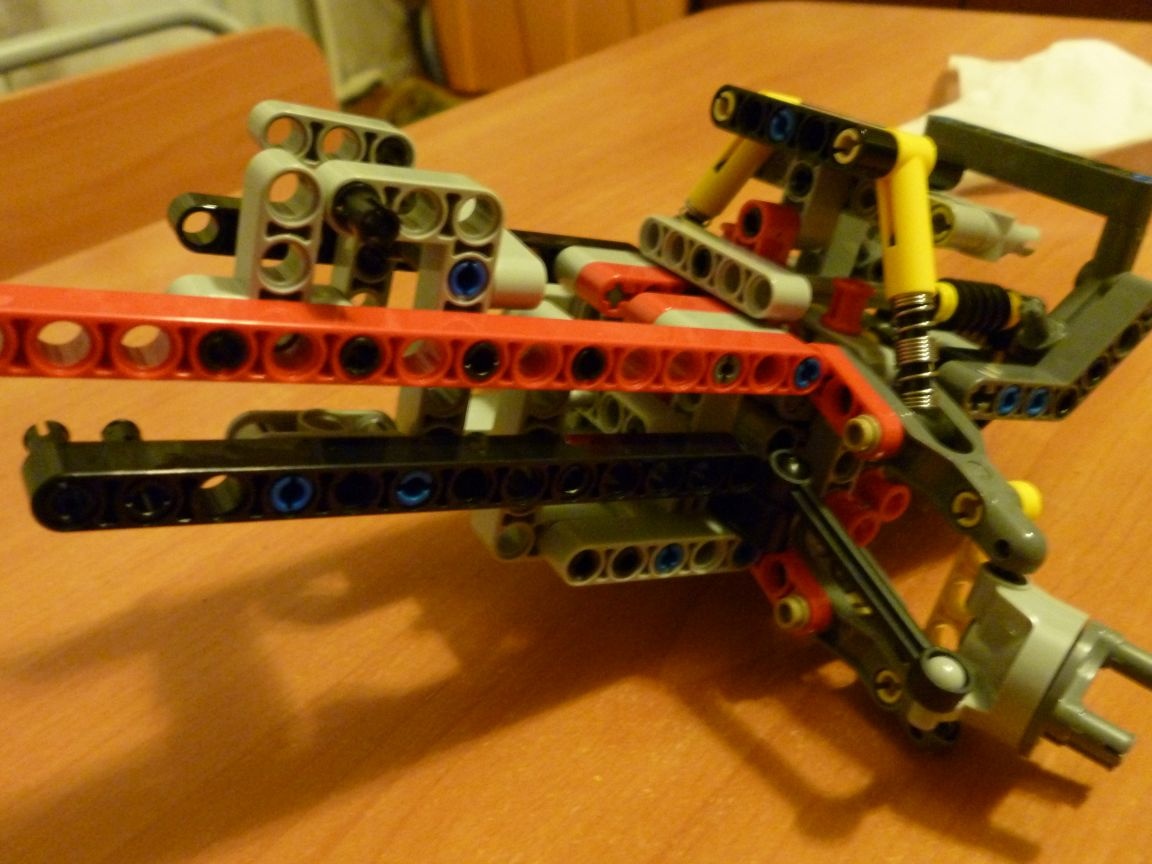

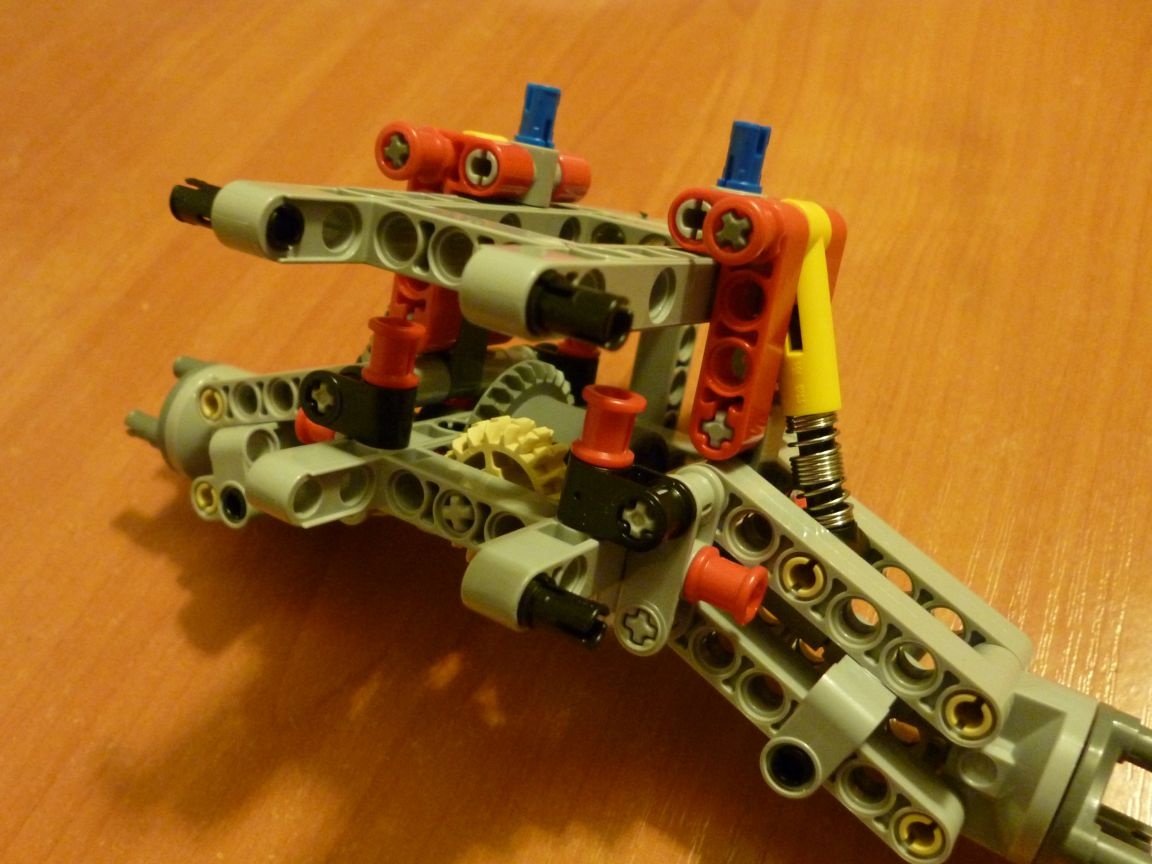
Hakbang 3 tipunin ang tsasis.
Ikinonekta namin ang parehong mga bahagi tulad ng ipinapakita sa larawan:

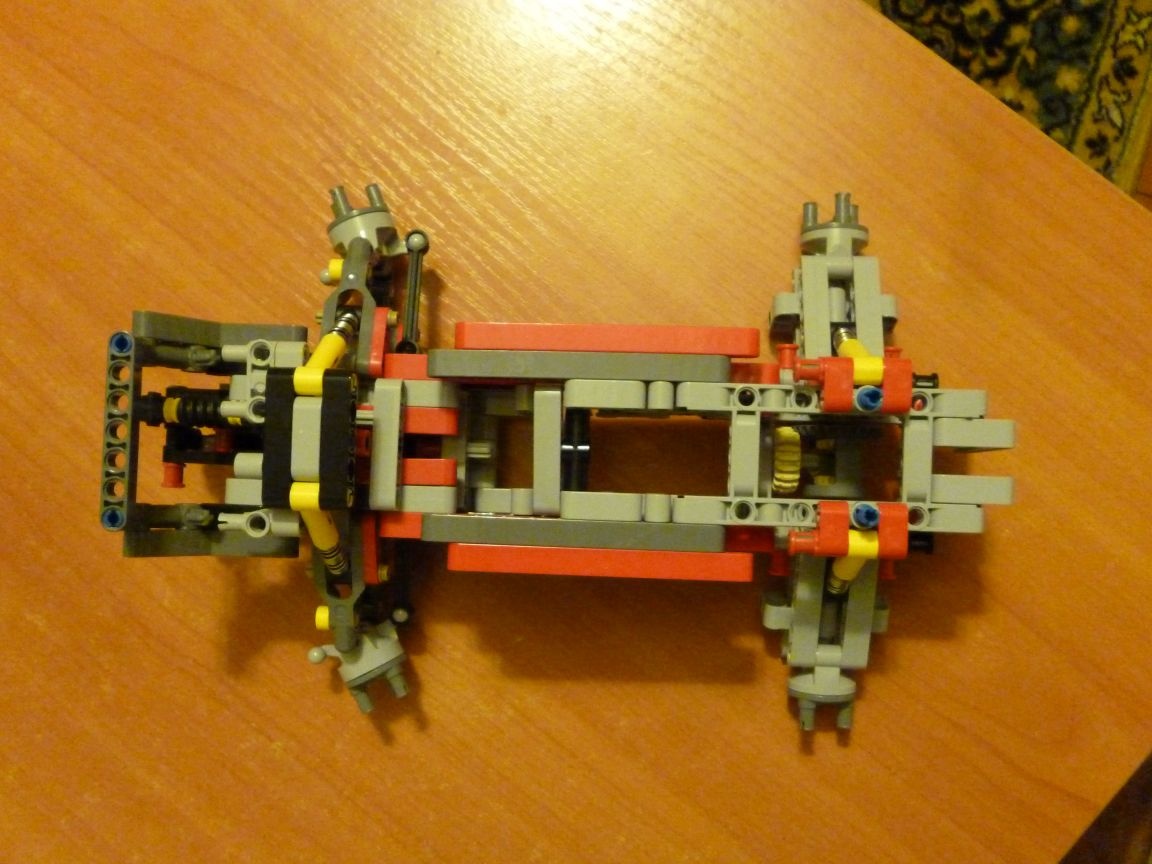
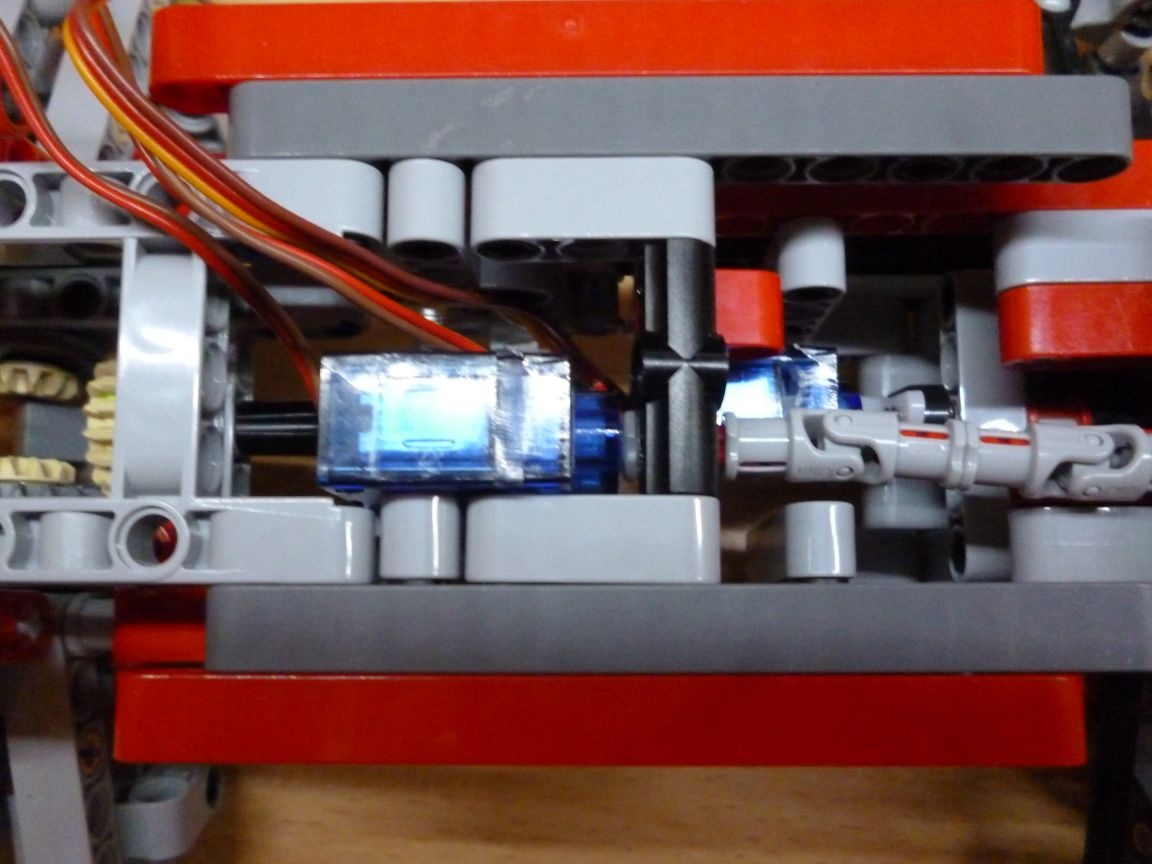
Nalutas ko ang problema ng pagkonekta sa gearmotor sa mga bahagi ng taga-disenyo tulad ng sumusunod: Inilagay ko ang pagkonekta ng manggas sa axis ng gearmotor at inilagay ang isang piraso ng tugma para sa pag-aayos. Para sa pag-mount ng motor motor na ginamit na metal plastic mula sa isang disenyo ng bakal at isang salansan.
Ito ay ang mga sumusunod:
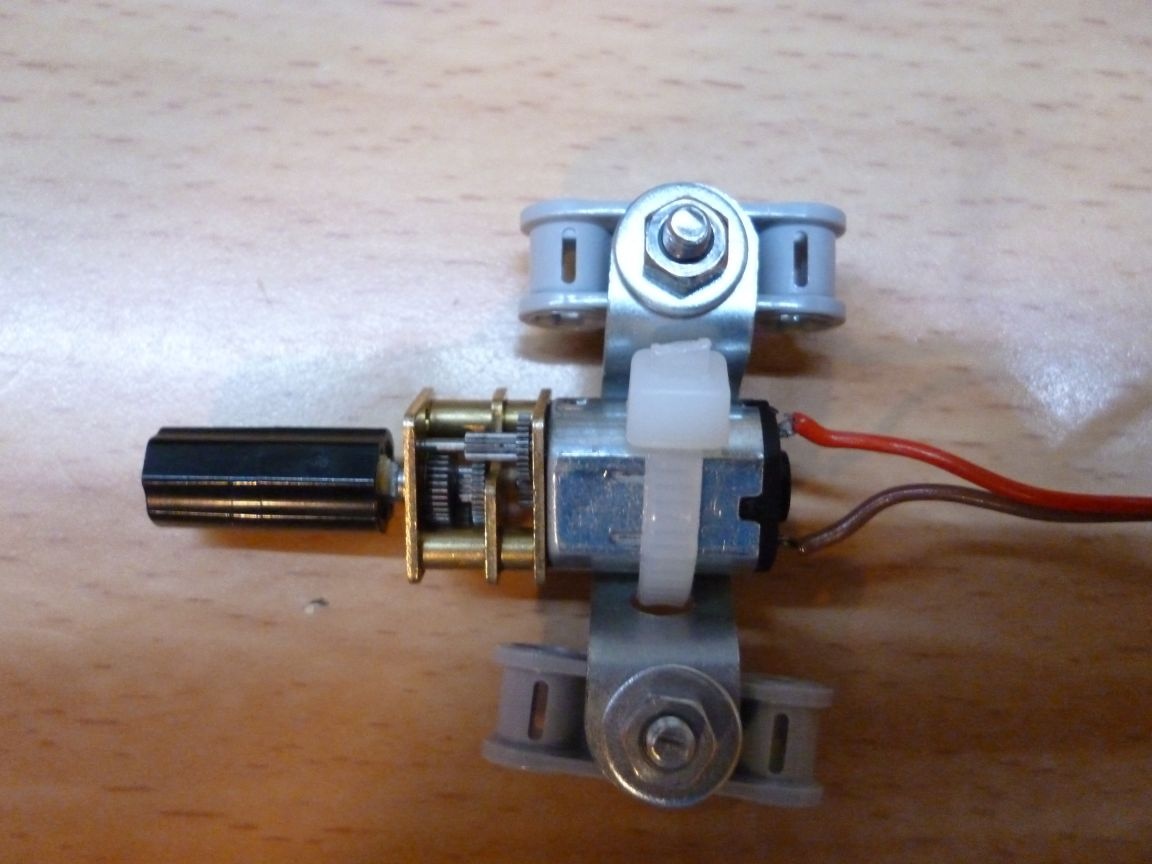
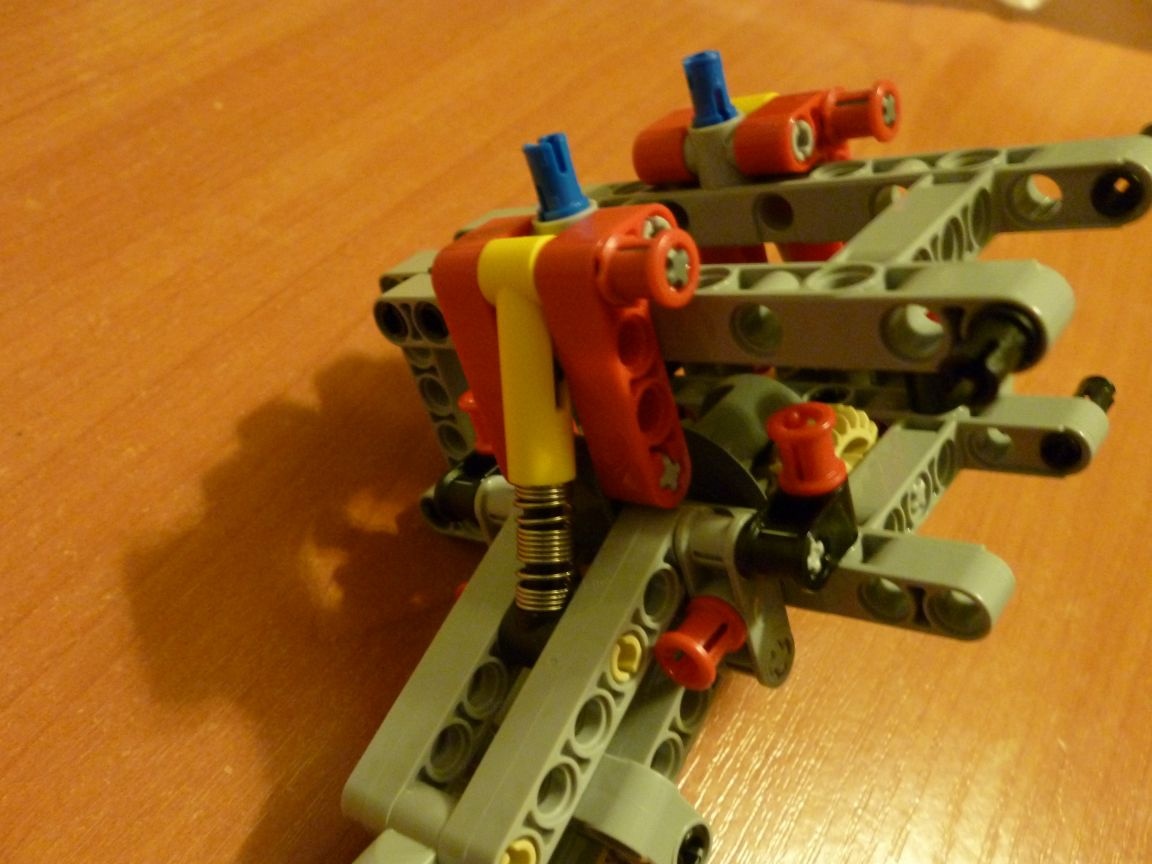
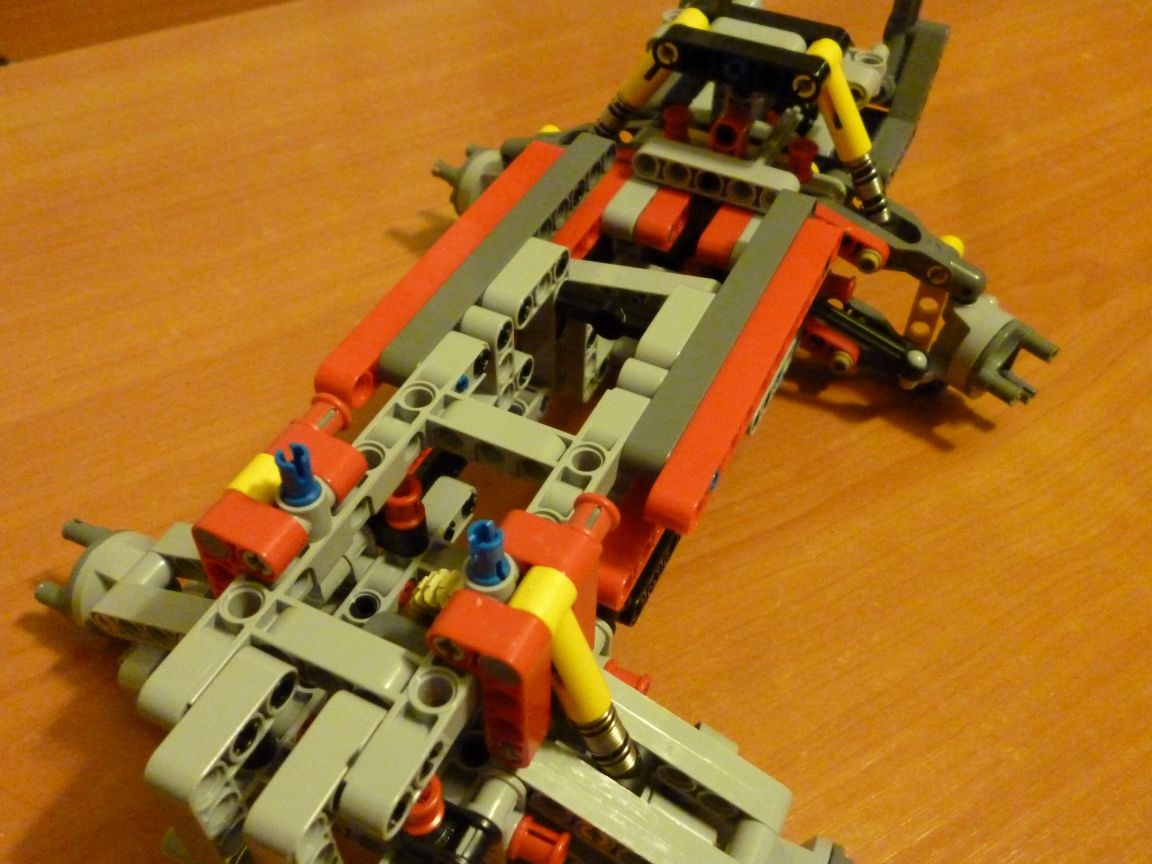
Mag-mount sa tsasis:
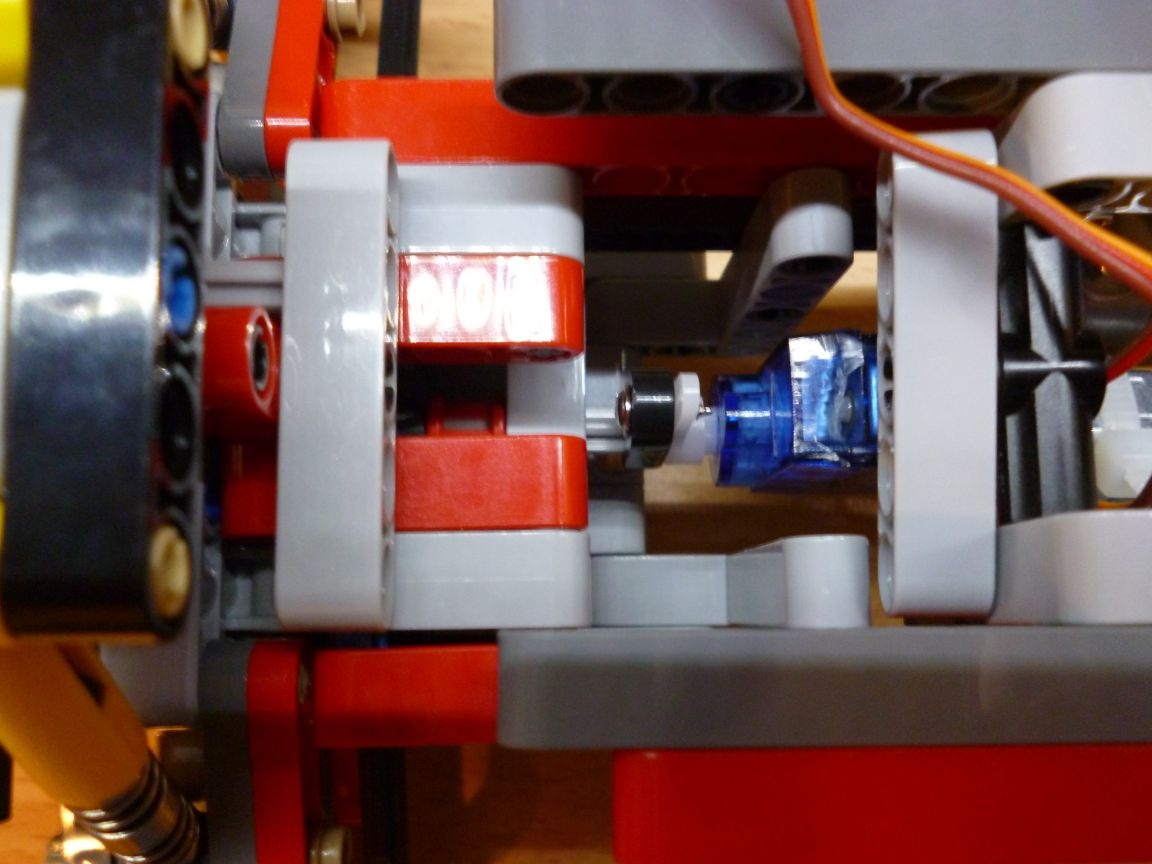
Upang maisagawa ang pag-ikot ay kinuha ang servo SG-90. Kinakailangan na maingat na mag-drill, upang hindi hawakan ang mga panloob na bahagi, isang butas na may diameter na 3.2 mm o pinutol lamang gamit ang isang headset na headset. At pinutol din ang mga nakausli na bahagi ("mga pakpak" para sa pag-fasten). Nagpasok kami ng isang bolt sa butas na ginawa at ayusin ito ng mga mani. Sa servo shaft ay inilalagay namin sa isang pingga na may naka-screw na bahagi mula sa lego:
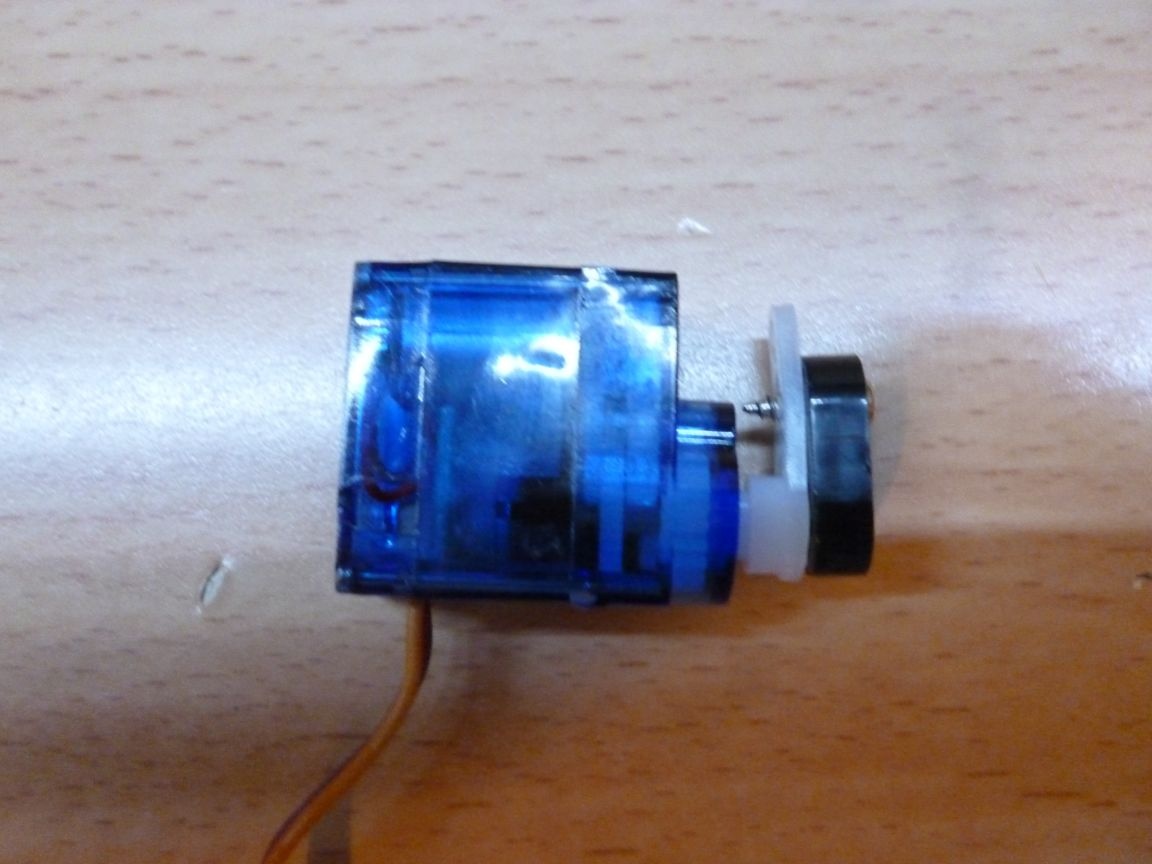
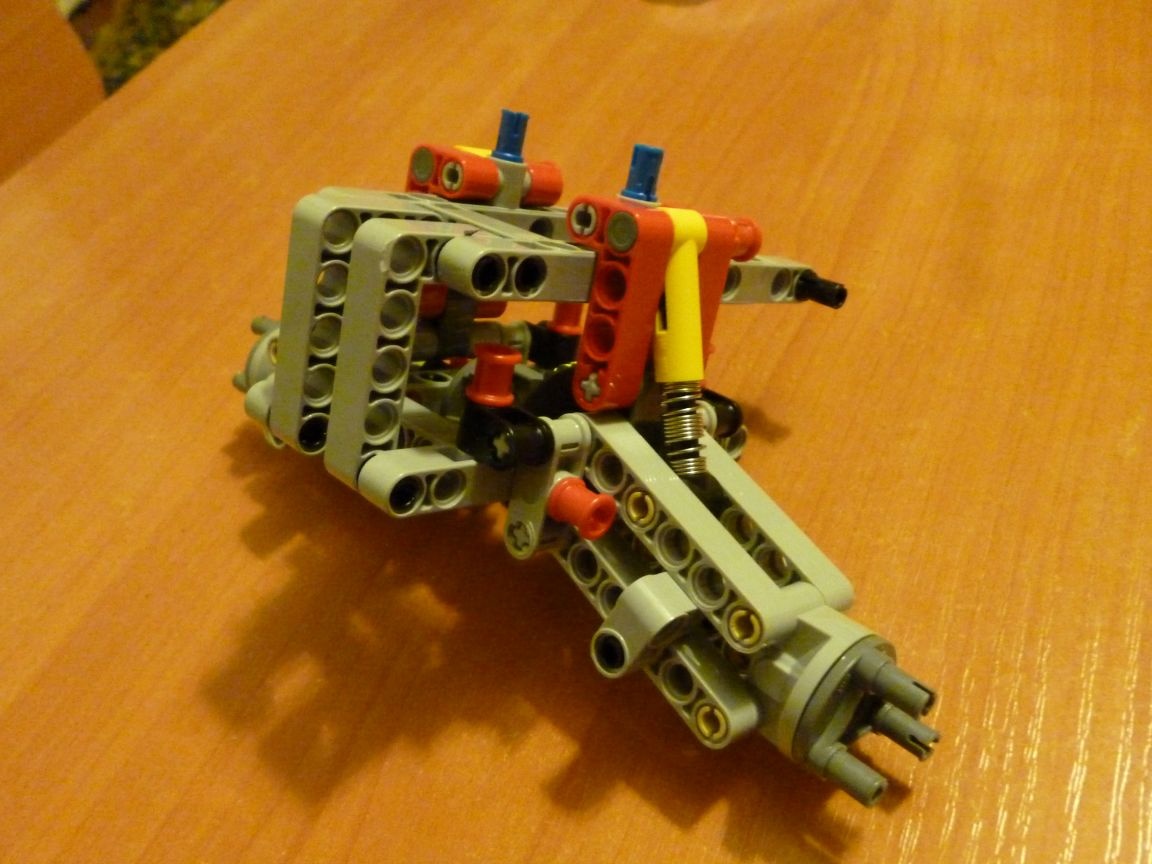
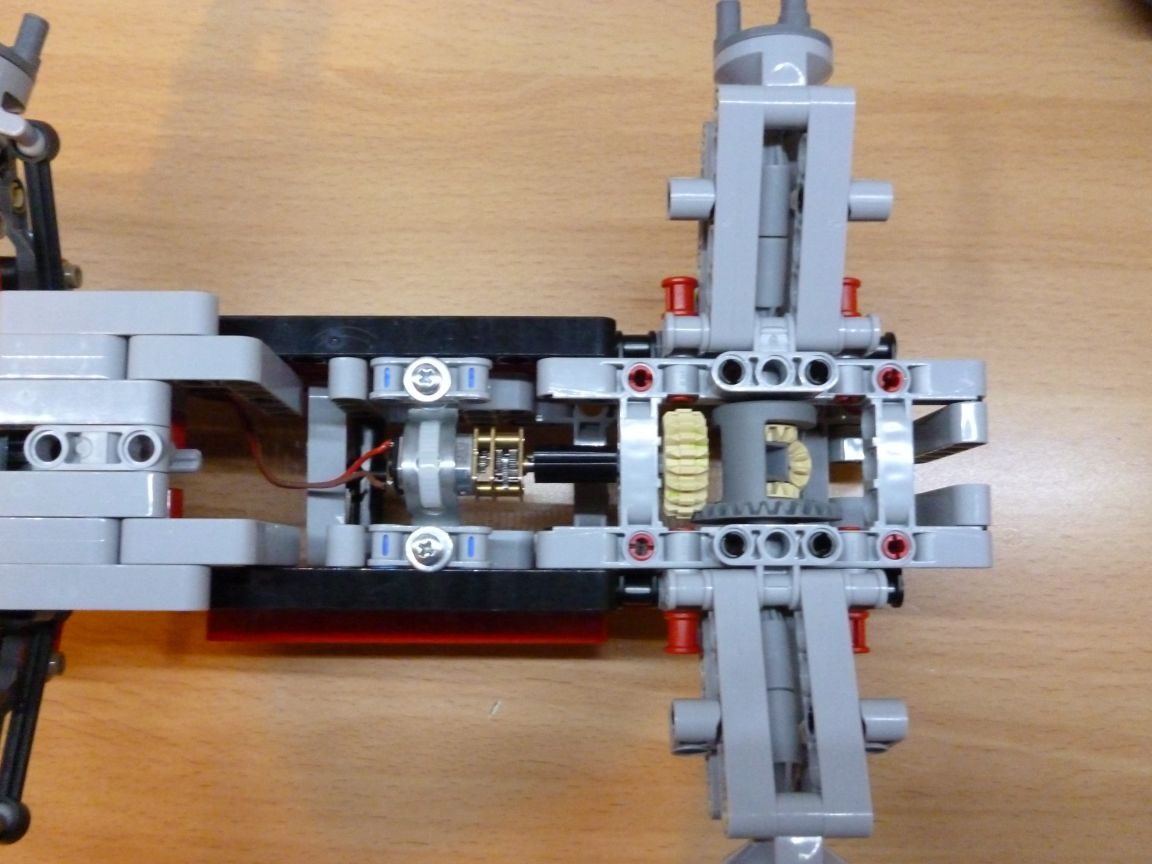
I-install:
Gagamitin namin ang pangalawang servo para sa winch. Ginagawa namin ang katulad ng una. At ngayon, kailangan itong ma-moderno upang malayang umiikot ito. Upang gawin ito, i-disassemble namin ang servo drive, alisin ang board at panghinang ang mga wire nang direkta sa motor. Kinukuha namin ang pangunahing gear at pinutol ang mga hinto ng paglalakbay.At sa wakas, gumawa kami ng isang puwang na may isang clerical kutsilyo sa pangunahing gear tulad ng sa larawan:
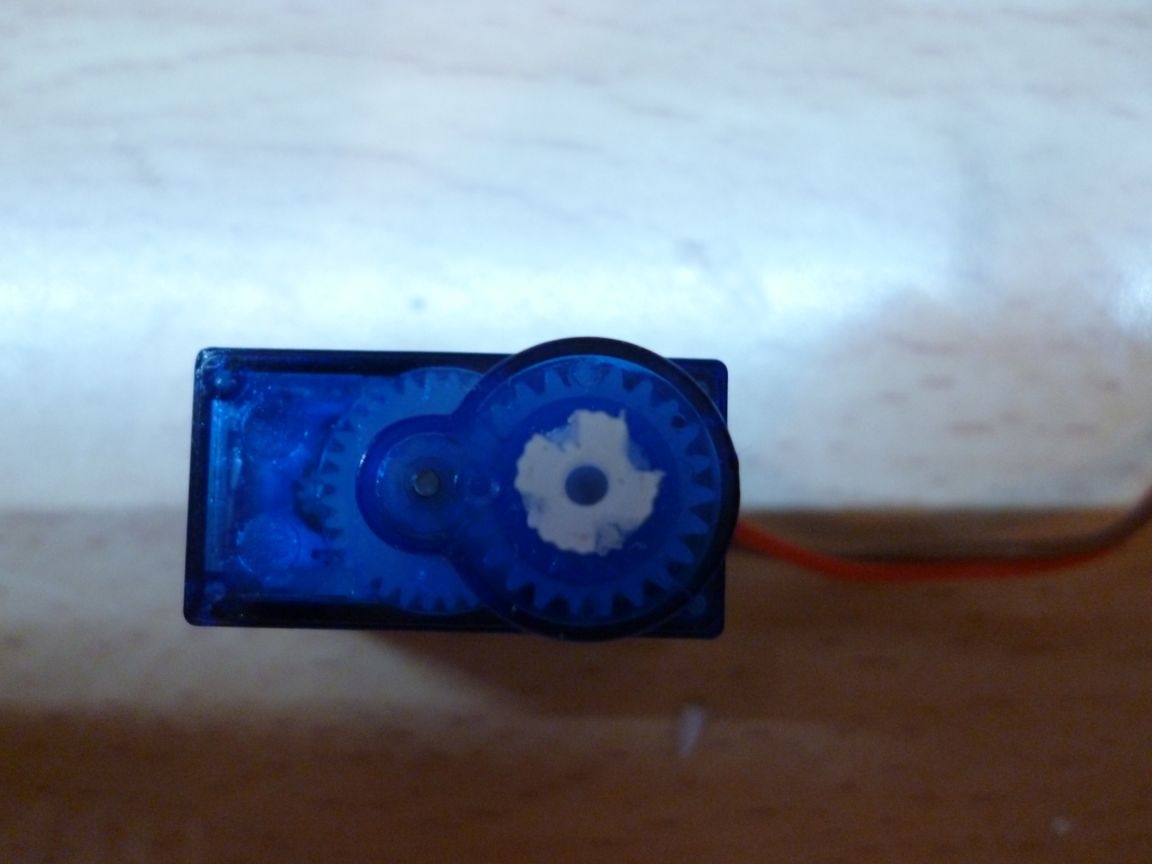
Kumonekta kami sa aming winch at inilalagay sa tsasis:

Hakbang 4 Pamamahala ng Controller
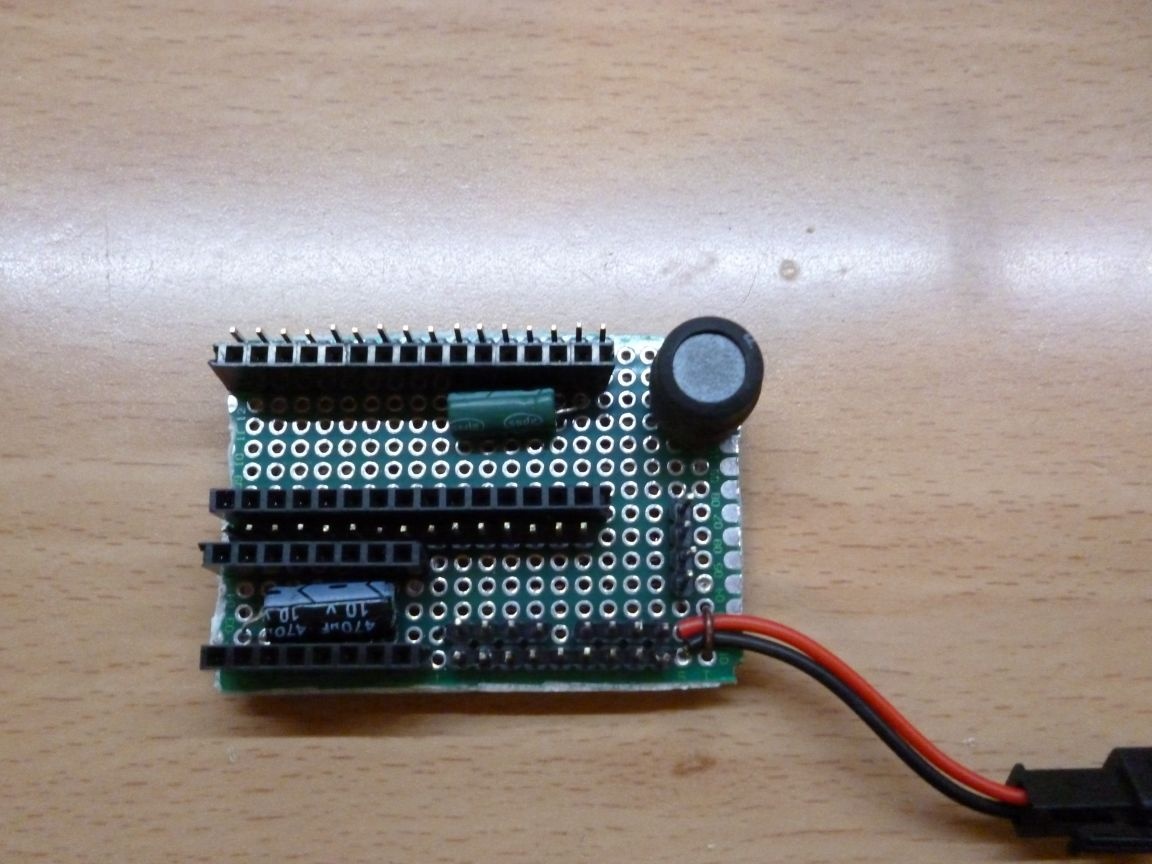
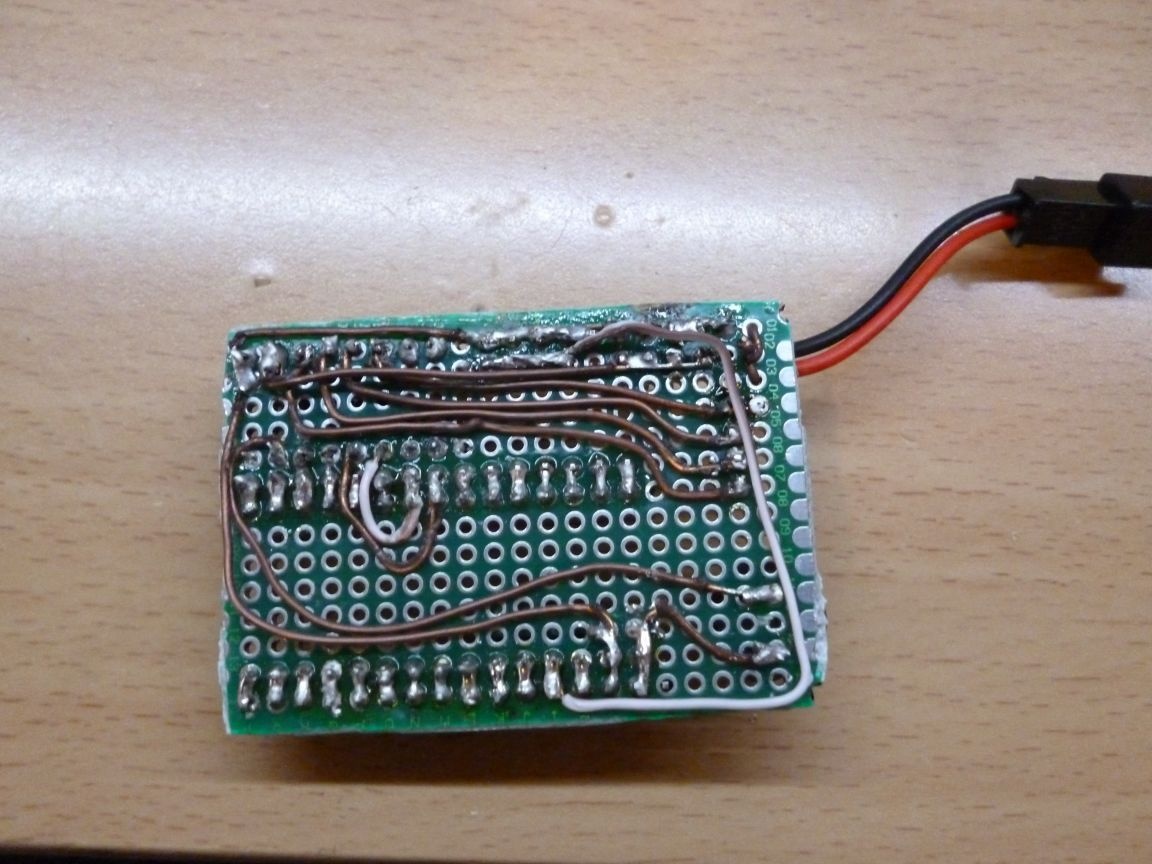
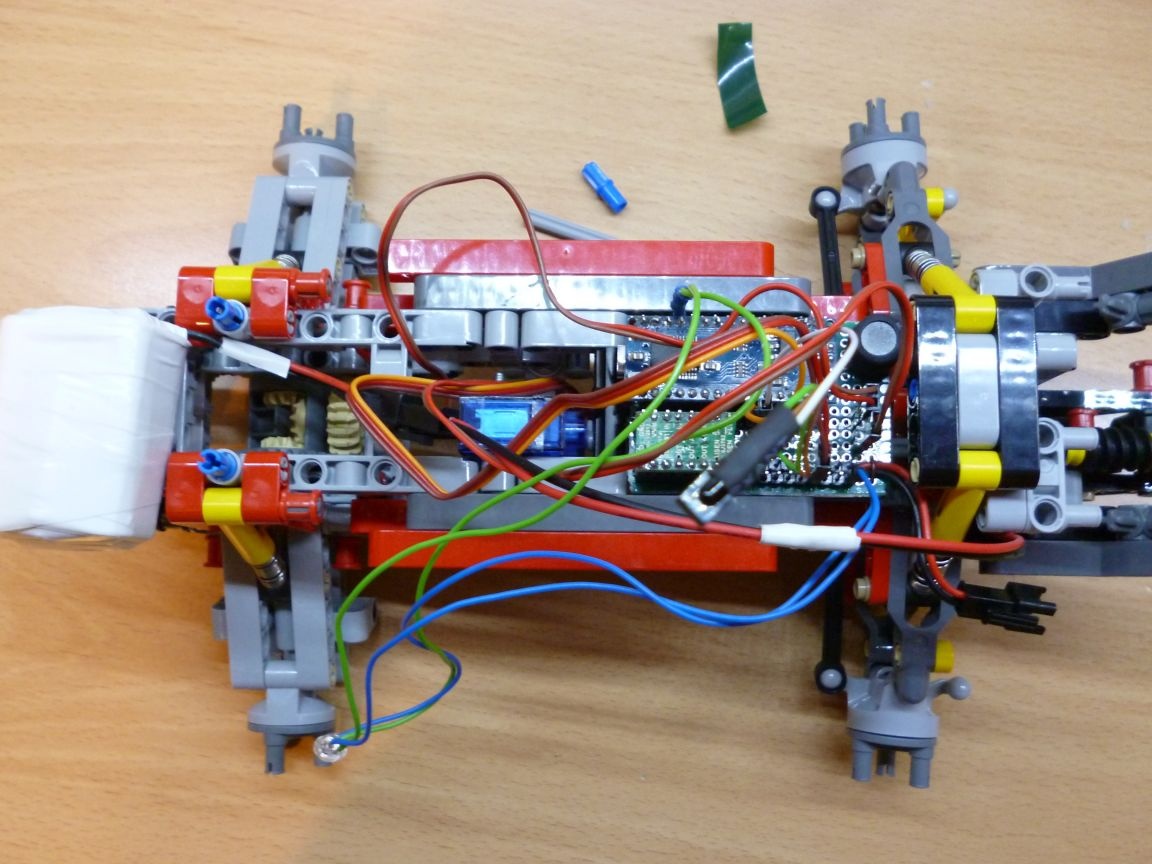
Para sa control gagamitin namin ang tatanggap ng Arduino at IR. Kumuha kami ng isang paghihinang iron at tipunin ang sumusunod sa circuit board:
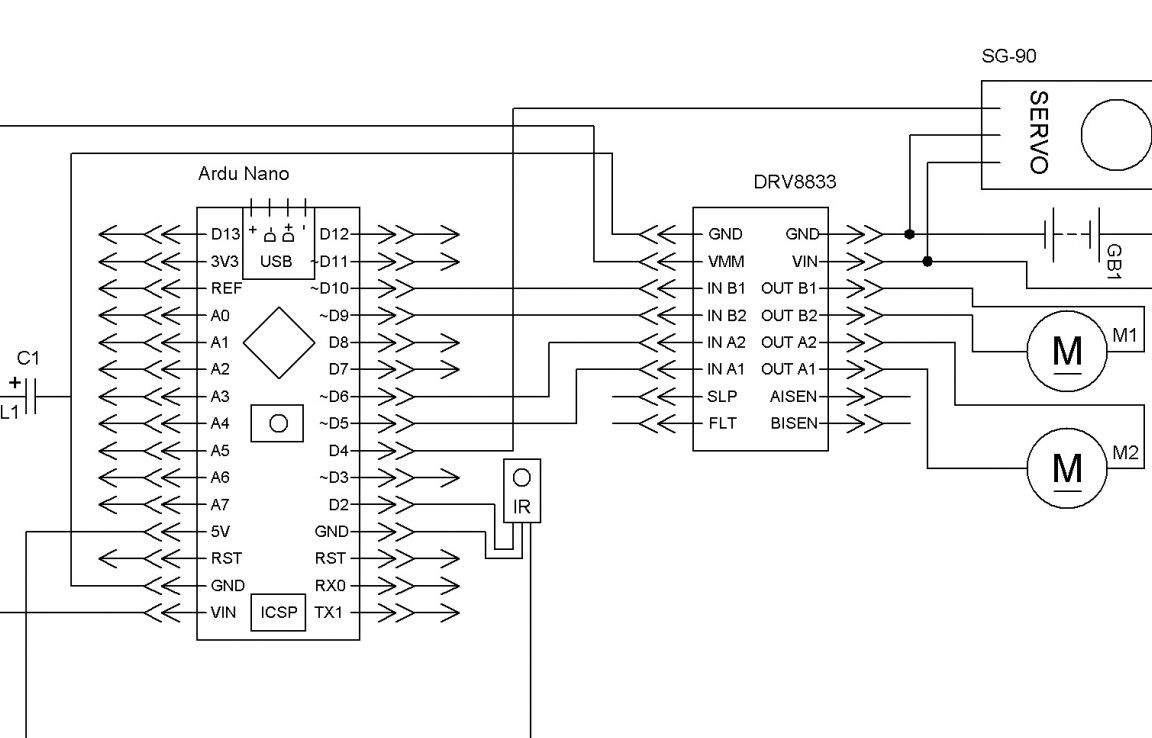
Ipaliwanag ko: anumang mababang kapasidad na kapasitor, ang inductance coil ay makikita mo rin, kailangan mong patatagin ang boltahe ng microcontroller. Ang mga resistor ay pinili para sa mga LED na ginamit. Ang IR receiver o TSOP ay maaaring makuha mula sa isang lumang laruan, o binili sa isang tindahan ng radyo. Kung mayroong malakas na pagkagambala, magdagdag ng isang kapasitor sa circuit circuit ng receiver ng IR.
Bilang isang resulta, nakukuha namin:
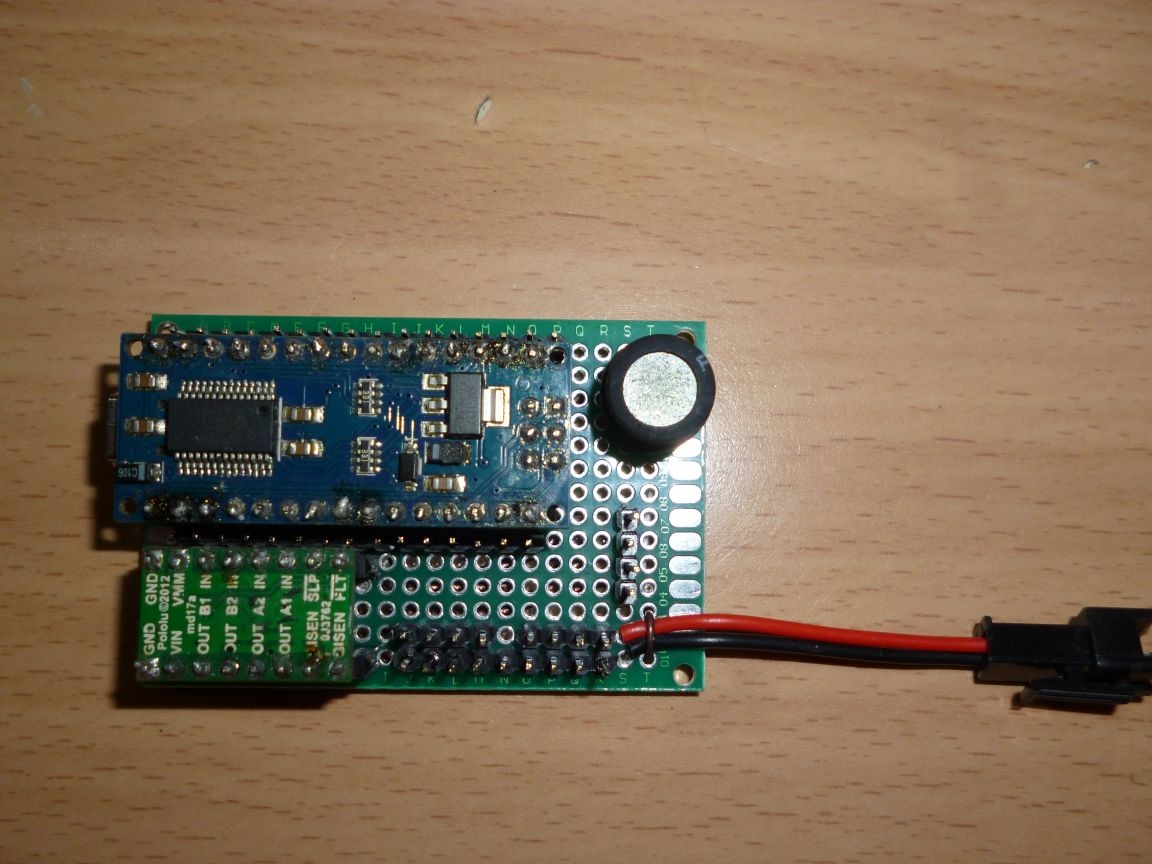
Nag-install kami ng Arduino Nano at DRV 8833 sa kanilang mga lugar:
At ilagay ang board sa tsasis:
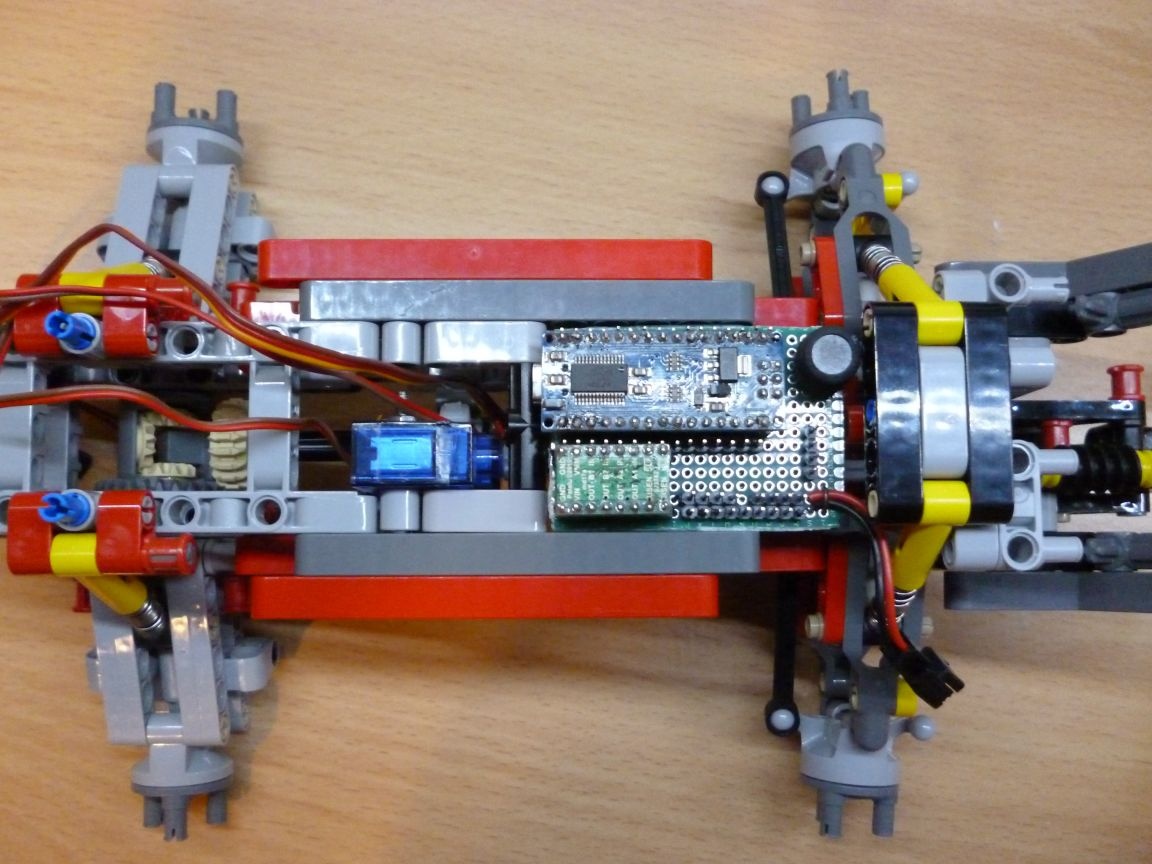
Ang suplay ng kuryente - 6 na baterya Ni-Mn 1.2v 1000mA. Kinakailangan na ibenta ang mga ito sa serye at i-wind ang mga ito gamit ang de-koryenteng tape. Mag-pandikit sa double-sided tape sa likod ng tsasis.
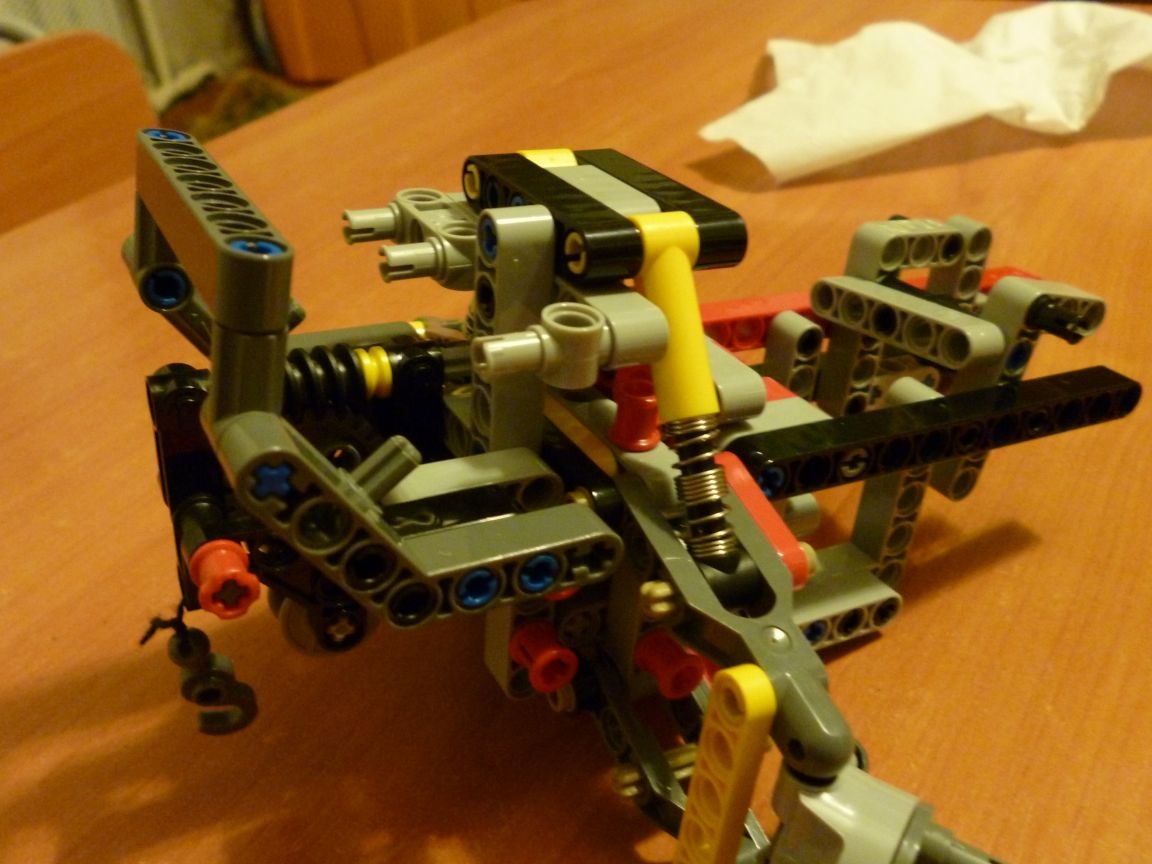
Ikinonekta namin ang aming buong istraktura:
Hakbang 5 Cabin
Ang cabin ay personal na aking improvisasyon, walang mga handa na tagubilin, kaya kailangan mong mangolekta mula sa mga litrato.



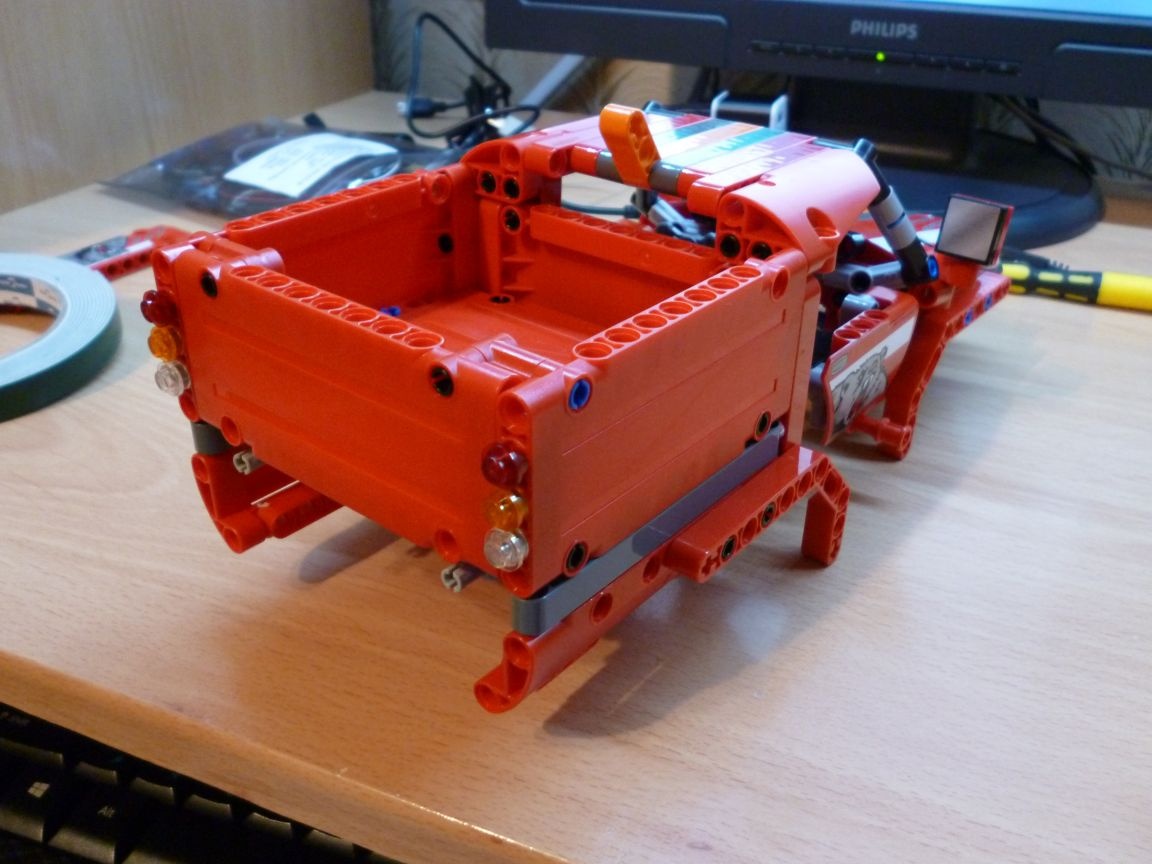
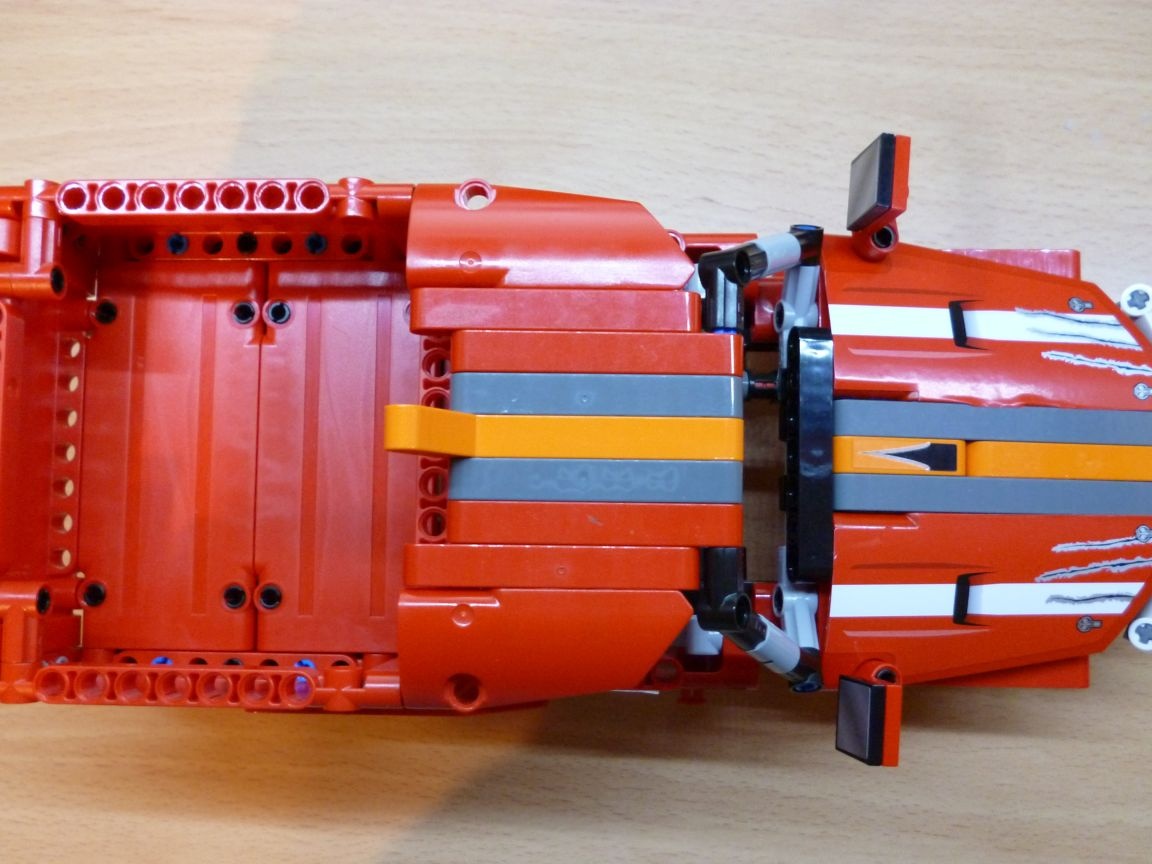
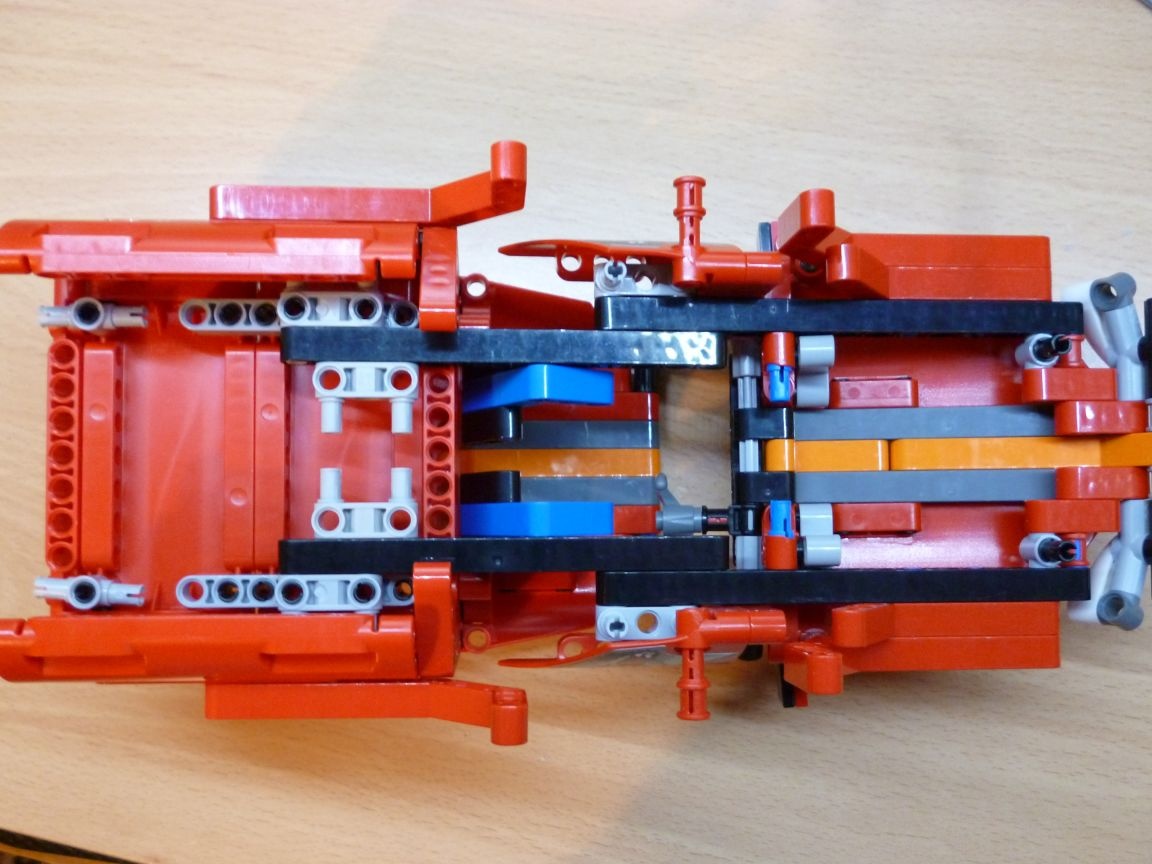
Maaari kang mag-ipon ng iyong sariling bersyon, kailangan mo lamang na magkasya ito sa ilalim ng tsasis. Ang pangunahing bagay dito ay upang tumugma sa pag-mount kasama ang tsasis. Mayroong apat sa mga ito at malinaw na nakikita sa larawan mula sa ilalim ng taksi.
Hakbang 6 firmware.
Ngayon, gayunpaman, tulad ng dati, nag-program ako sa Arduino IDE. Una kailangan mong punan ang aking firmware at sa pamamagitan ng terminal tingnan ang mga remote control code na iyong gagamitin. Maaari kang kumuha ng anumang IR remote, halimbawa mula sa isang TV, DVD player o tipunin ang iyong sarili (Mayroon akong isang homemade remote control mula sa Sega joystick). Sa pamamagitan ng pagpindot sa isang pindutan, sa terminal makikita natin ang code ng pinindot na pindutan, isulat ito sa isang piraso ng papel. Ginagawa namin ito sa lahat ng mga pindutan kung saan nais naming i-program ang mga pagkilos. Susunod, i-edit ang sketch. Isinulat namin ang aming mga code sa loob nito para sa mga kinakailangang aksyon at flash muli ito. Ang firmware na ito ay na-configure sa aking remote na Sega joystick. Sa proseso ng paglalaro kasama ang makina, napansin ko ang ilang mga nuances o abala. Mahirap makamit ang maaasahang pagtanggap ng mga utos ng IR sa panahon ng paggalaw. At ito ay nangyayari tulad nito: pindutin ang arrow pasulong, ang makina ay nakatanggap ng isang utos na pumunta, at nagmamadali pasulong, pinakawalan ang arrow, ngunit hindi ito nakatanggap ng isang hinto na utos, at patuloy na humimok hanggang sa mag-crash o makakatigil, napuno ito ng mga breakdown. Bahagyang, ang problemang ito ay maaaring malutas sa pamamagitan ng pagdaragdag ng bilang ng mga retry ng pagpapadala ng isang utos, gayunpaman, posible lamang ito kapag ginagamit ang remote control sa iyong sarili. Ngunit pipiliin ko ang isang mas maraming kardinal solution - Magpapalipat ako sa paggamit ng isang 433MHz transmitter - receiver. Isusulat ko ang tungkol dito sa susunod na artikulo.
Hakbang 7 ilagay sa mga gulong.
Kaya, kailangan lang nating ilagay ang taksi sa tsasis, ilagay ang mga gulong at suriin ang aming SUV.

