


Magandang hapon, ngayon nais kong ibahagi ang mga tagubilin sa paggawa ng isang tangke. Magkakaroon ng dalawang pagpipilian para sa panloob na controller: ESP -8266 at Arduino Pro Mini. Sa unang bersyon, ang kontrol ay isinasagawa sa pamamagitan ng mga komunikasyon sa Wi-Fi. Sa pangalawa - IR remote. Ginawa ito batay sa TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), hinihimok ito ng isang Tamiya 70097 Twin-Motor Gearbox Kit at ang mga motor na dumating kasama ang gearbox.
Kakailanganin namin:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- modelo ng pandikit (TAMIYA Semento halimbawa)
- Tamiya 70097 Twin-Motor Gearbox Kit
- ESP 8266 -12E o Arduino Pro Mini 8MHz 3.3V
- boltahe pampatatag AMS 1117 3.3v 8000mA (kung opsyon na may ESP 8266-12E)
- driver ng Qifei L9110
- kapasitor 10v 1000uF
- dalawang kulay (pula, berde) LED
- asul na LED
- 2 pulang LEDs
- Tanggap ng IR
- photoresistor
- 2 mga compartment para sa 2 na baterya ng AAA o 4 na baterya ng AAA 1.2V 1000mA-MN
- 2 resistors 2ohm
- 4 na resistors 75 ohms
- 6 na resistors 10 kOhm (kung opsyon na may ESP 8266-12E)
- pindutan
- photoresistor
- USB - TTL
- paghihinang bakal
- maraming kulay na mga wire
Hakbang 1 Pabahay at mekanika.
Una kailangan mong mangolekta ang modelo TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Namin nakadikit ang ibabang bahagi ayon sa mga tagubilin, maliban sa mga bahagi na sumasaklaw sa mga bukana ng outlet para sa mga shaft ng gearbox. Hindi rin dumikit ang mga nangungunang bituin. I-paste ang itaas na bahagi ayon sa mga tagubilin nang walang mga pagbabago. Ang pagkakaroon ng nakadikit sa lahat ng ito, mag-iwan para sa pagpapatayo at magpatuloy sa koleksyon ng gearbox. Tulad ng makikita mula sa mga tagubilin Tamiya 70097 ay maaaring tipunin sa dalawang magkakaibang mga bersyon.
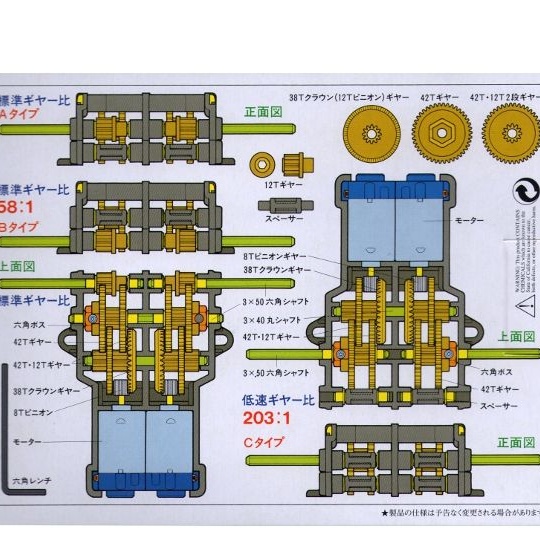
Ang unang pagpipilian na may isang ratio ng gear ng 58: 1, ang pangalawa - 203: 1. Kailangan namin ang unang pagpipilian. At narito rin, ay hindi gaanong simple. Sa kasong ito, ang output ng axis ay maaaring malapit sa ilalim ng gearbox o sa gitna. Ang pagbuga ng mga palakol ay dapat gawin sa gitnang butas! Ang pagkakaroon ng tipunin ang gearbox, nagpapatuloy kami upang mai-install ito sa modelo. Sa teorya, ang lahat ay dapat maging simple, dahil pareho ang modelo at gearbox ng isang firm. Sa pagsasagawa - ang gearbox ay kailangang itulak doon. Sa pahalang na posisyon ng gearbox, ang mga shaft ng mga gulong sa drive ay umbok paitaas, kaya kinailangan kong i-cut ang isang metal plate, na naging posible upang ayusin ang gearbox sa nais na posisyon.

Ang mga axle ng gearbox ay kailangang gupitin ng 3 mm. Pagkatapos kola ang mga gulong sa drive.

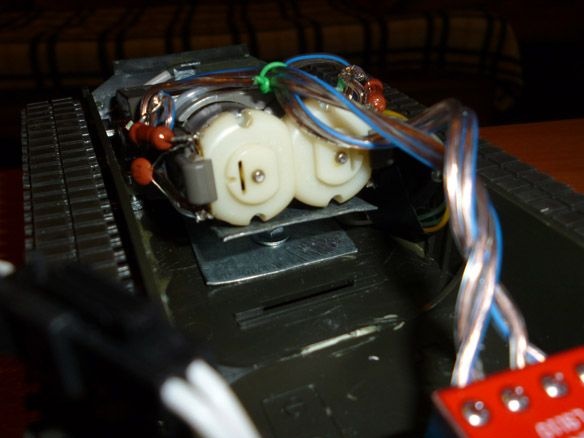
Sa itaas na bahagi na mas malapit sa likod, gumawa kami ng mga butas para sa isang dalawang kulay na LED at isang tatanggap ng IR.

Ang mas malapit sa harap ay isang butas para sa isang asul na LED na magsisilbing flashlight.

At sa loob ng hatch - para sa isang photoresistor.

Sa baligtad, idikit ang pulang LED para sa pag-iilaw.

Sa lahat ng nasa itaas, kailangan mong ibenta ang mga wire. Ito ay mas maginhawa upang gawin ito bago mai-install.
Hakbang 2 Elektronikong
Dito ay magbibigay ako ng isang pagpipilian ng mga pagpipilian para sa karagdagang pagpupulong.
Kung pinili mo ang ESP 8266. Ang built-in na module ng Wi-Fi ay lubos na nagpapadali sa proseso ng kontrol at koneksyon.Madali itong ma-program sa Arduino IDE. Pinakamabuting pumili ng isang module na may 4 Mb ng memorya. Sa kasong ito, kinakailangan upang mangolekta ng pinakamababang gamit upang magamit at i-flash ang ESP-8266. Tanging ang VCC pin ay konektado nang direkta sa suplay ng kuryente, ang natitirang mga pin: CH_PD, RESET, GPIO0, GPIO2, ay dapat mahila sa power supply (VCC) sa pamamagitan ng isang risistor. Ang mga resistor ng 10kOm ay maaaring mapalitan sa iba, mula sa 4.7kOm hanggang 50kOm, maliban sa GPIO15 - ang halaga nito ay dapat hanggang sa 10k. Direkta, sa minus (GND) ng suplay ng kuryente, ikinonekta namin lamang ang GND, at hinila din namin ang GPIOO sa pamamagitan ng risistor sa 10kOm, upang ilagay ang modyul sa mode ng pag-download ng firmware, sa GND. Ang pindutan ay kinakailangan para sa pag-reboot at pag-flash ng module. USB-TTL konektor - para sa firmware.
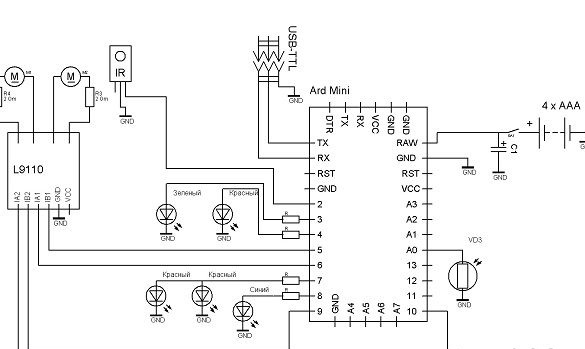
Narito ang isang diagram
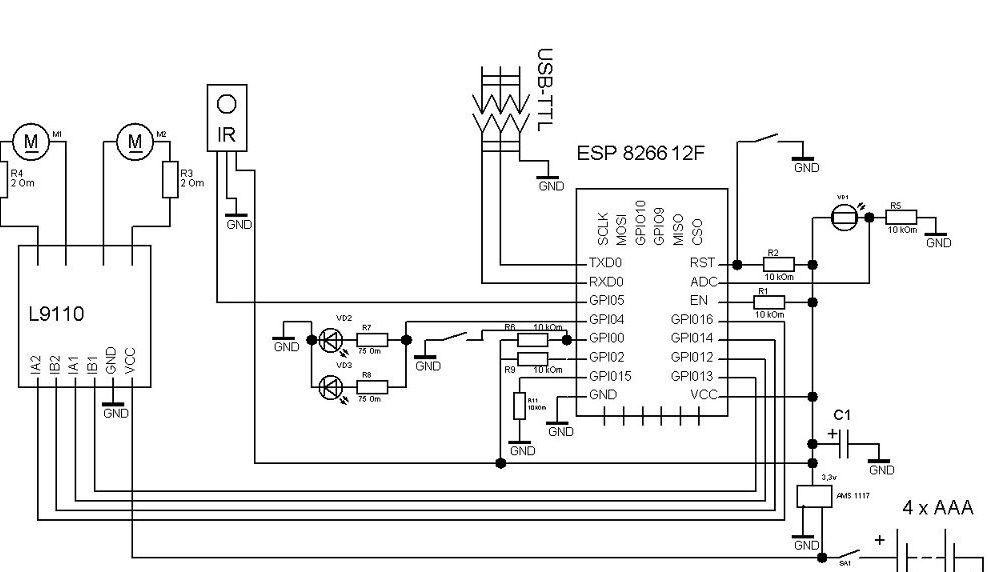
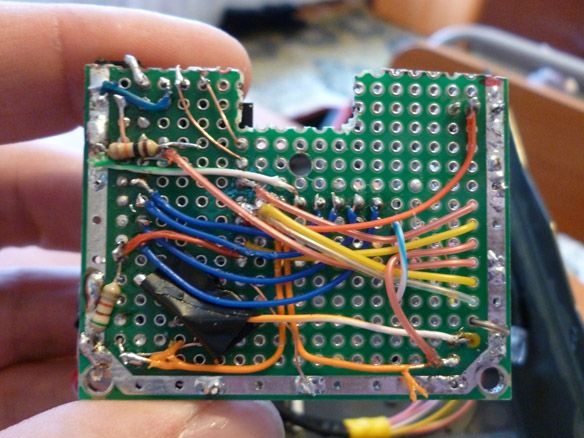
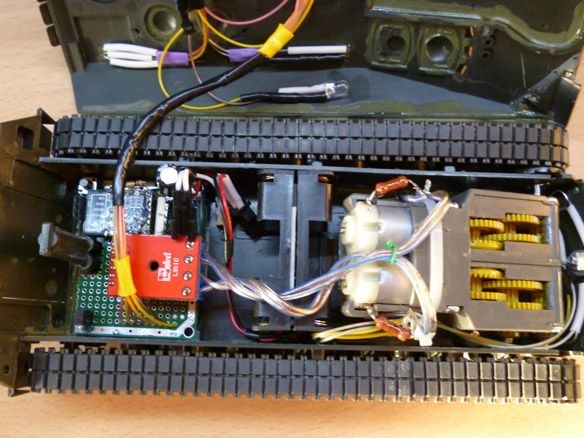
Ipapaliwanag ko ng kaunti, ang asul at dalawang pulang LED ay kinakailangan para sa backlighting (nakikita at maganda sa dilim), ang photoresistor ay konektado sa ADC ng magsusupil at kinakailangan upang matukoy ang pag-iilaw (kapag nagiging madilim ang backlight). 10 kOhm pull-up resistors, 75 Ohm para sa mga LED, 2 Ohm kasalukuyang-nililimitahan para sa mga motor (nang wala sila, kapag sinusubukan mong ilipat, ang controller ay na-overload). Ibinebenta namin ang lahat ayon sa circuit sa circuit board. Para sa suplay ng kuryente, maaari mong gamitin ang 4 na "maliit" na baterya o apat na laki ng baterya ng AAA, na ibinebenta sa serye. Naglalagay kami ng dalawang compartment ng dalawang baterya na may double-sided tape at kumonekta sa serye. Ang parehong mga baterya ng baterya at mga nagtitipon ay inilalagay sa pagitan ng gearbox at circuit board.

Kung nahulog ang iyong napili sa Arduino. Tanging ang Arduino Pro MINI ang umaangkop sa loob. Ito ay nagkakahalaga ng pagpili ng isang 3.3 volt board, dahil ang mga motor ay idinisenyo para sa 3 volts, at hindi mo nais na ihiwalay ang mga motor at Arduino. Ang Arduino ay mas madali. Ang buong controller harness at boltahe regulator ay nasa board mismo. Ito ay nananatiling i-unsolder ang Arduino socket at motor driver sa circuit board.

Hakbang 3 Paghahanda ng kapaligiran sa programming.
Upang mai-edit ang firmware at punan ang sketch sa ESP, kailangan mong i-install ang Arduino IDE mula sa opisyal na site ng Arduino.cc, pati na rin i-install ang add-on para sa ESP, sa pamamagitan ng Boards Manager. Upang gawin ito, simulan ang Arduino IDE, pagkatapos ng File - Mga Setting - sa mga karagdagang Boards Manager URL na patlang, ipasok ang link
http://arduino.esp8266.com/package_esp8266com_index.jsoni-click ang OK (maaari kang magpasok ng maraming mga link na pinaghiwalay ng isang kuwit sa larangang ito). Susunod na Mga Tool - Board - Boards Manager, ipasok ang esp8266 sa patlang ng filter at mag-click sa ESP8266 ni ESP8266 Community Forum I-click ang I-install at maghintay para matapos ang pag-download. Ngayon ay nananatili itong piliin ang Lupon - Generic ESP8266 sa menu ng Mga tool at itakda ang dalas ng iyong module sa 80 o 160Mhz, laki ng memorya ng flash at piliin ang serial port kung saan nakakonekta ang USB-TTL adapter.
Para sa Arduino, i-install lamang ang Arduino IDE mula sa opisyal na website ng Arduino.cc.
Hakbang 4 firmware
Ito ay nananatiling i-edit ang sketch at punan ito ng ESP.
Sa patlang "String _ssid =" ";" sa pagitan ng mga quote ay nagpapahiwatig kung aling access point na nais mong kumonekta.
"String _password =" ";" ay ang password para sa network na ito.
"String _ssidAP =" Mardella ";" ang pangalan ng network na itataas ng ESP kung hindi ito kumonekta sa umiiral na.
"String _passwordAP =" 12345678 ";" - ang password ng network na itataas ng ESP kung hindi ito kumonekta sa umiiral na.
"String SSDP_Name =" Mardella ";" Pangalan ng SSDP
Matapos magsimula, sinubukan ng ESP na kumonekta sa access point na tinukoy sa sketch, kung matagumpay, kailangan mong matukoy ang IP address ng aming robot at kumonekta sa address na ito sa pamamagitan ng isang browser. Maaari ka ring dumaan sa isang computer sa imprastraktura ng network, hanapin ang aming tangke doon at i-double click upang kumonekta dito. Kung nabigo ang koneksyon, ang ESP ay nagiging access point. Pagkatapos ay maaaring makuha ang pag-access sa pamamagitan ng pagkonekta sa isang bagong access point at pagpasok sa 192.168.1.1 sa browser.
Ang web interface ay binubuo ng dalawang pahina. Ang unang upang makontrol. Ang pangalawa ay para sa pagpapasadya. Sa pangalawang pahina, maaari mong tukuyin ang access point kung saan nais mong kumonekta, pati na rin ang pangalan ng tank at ang pangalan at password ng access point na itinaas ng ESP. Ang lahat ng mga pagbabago ay magkakabisa pagkatapos ng pag-reboot. Maaari mo ring i-restart ang module sa pamamagitan ng web interface.
Para sa Arduino, kailangan mong i-edit ang lahat ng mga "results.value" na patlang. Ang pagkakaroon ng nakasulat sa mga IR code ng remote control na gagamitin mo doon.

Video tanchika: