
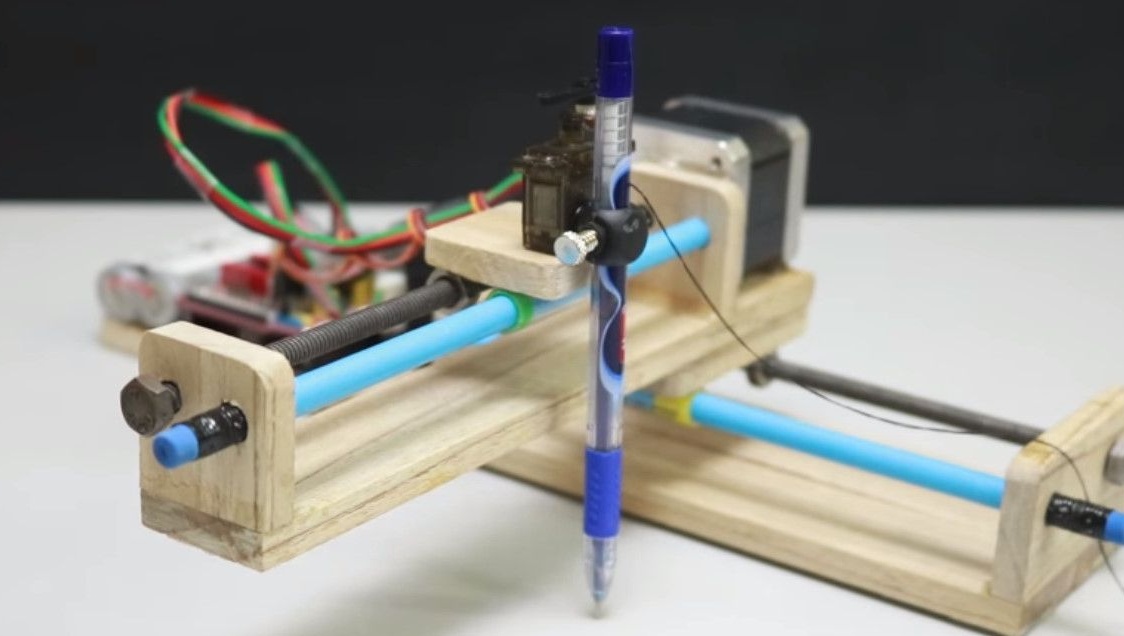
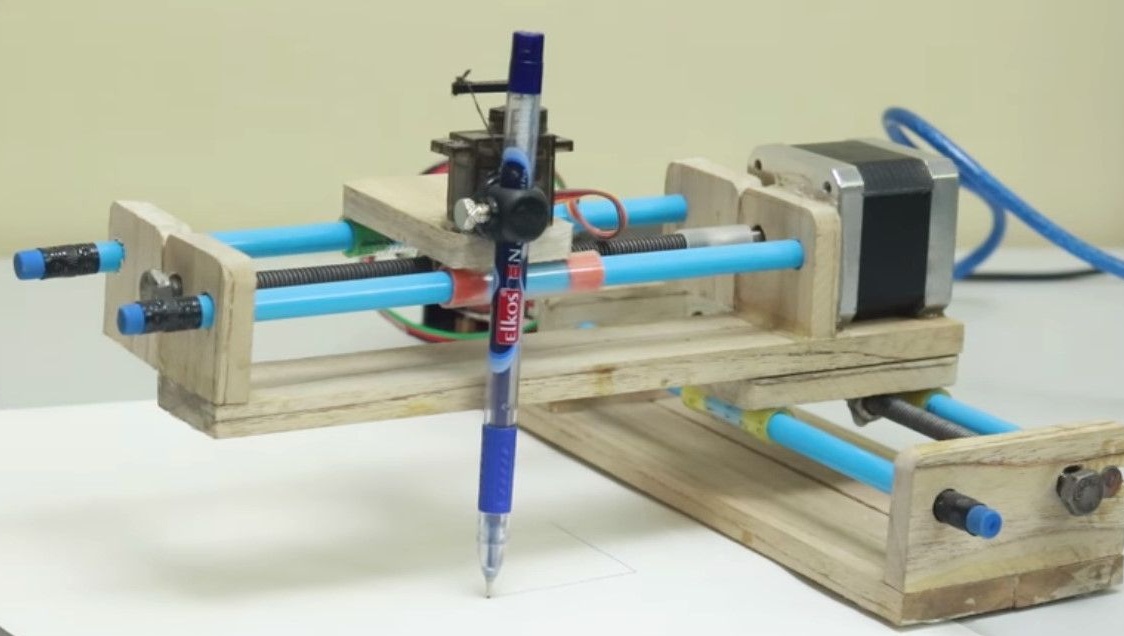
Sa artikulong ito, ang tagalikha ng "pagkamalikhain Buzz" ay nagpapakita kung paano lumikha ng isang 2D printer na maaaring magsulat sa isang panulat ng bukal.
Ang ideya ay kawili-wili sa ang prinsipyo ng pagpapatakbo ng makina na ito ay katulad ng isang taga-plot. Tanging isang sheet ng papel ay ganap na hindi gumagalaw, at ang ulo ay gumagalaw kasama ito kasama ang dalawang axes.
Mga tool at materyales napaka-simple, na ginagawang posible sa paggawa ng aparatong ito sa bahay.
1. Pag-drill, drill
2. baril na pandikit
3. kutsilyo ng kagamitan
4. Nakita
5. playwud
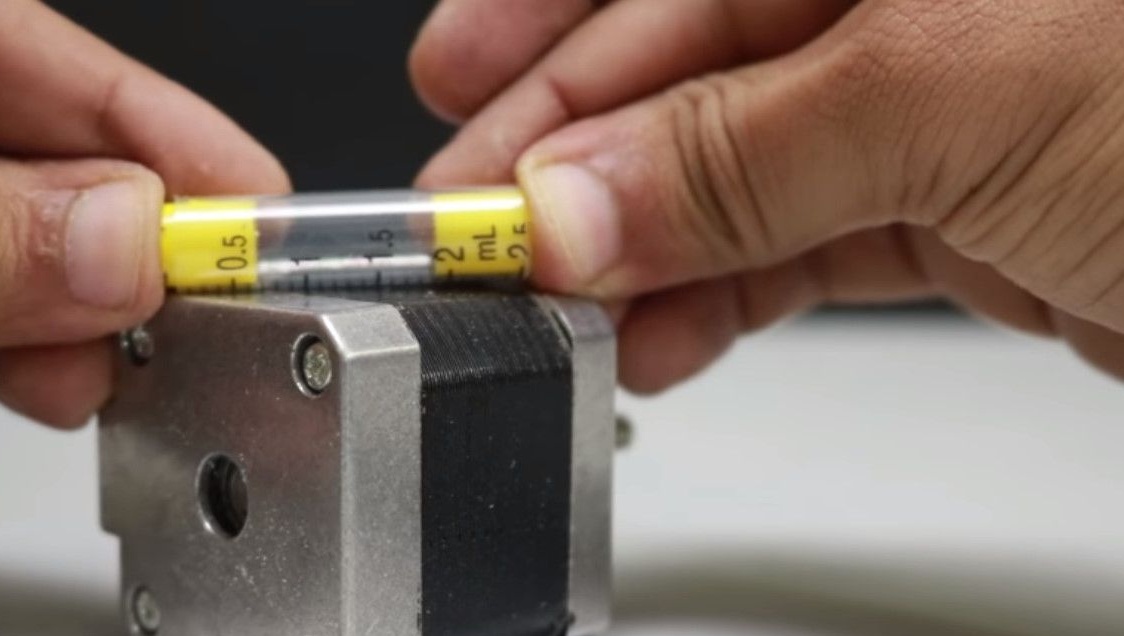
6. Natatanggal na syringe 2.5 cubes
7. Pangola
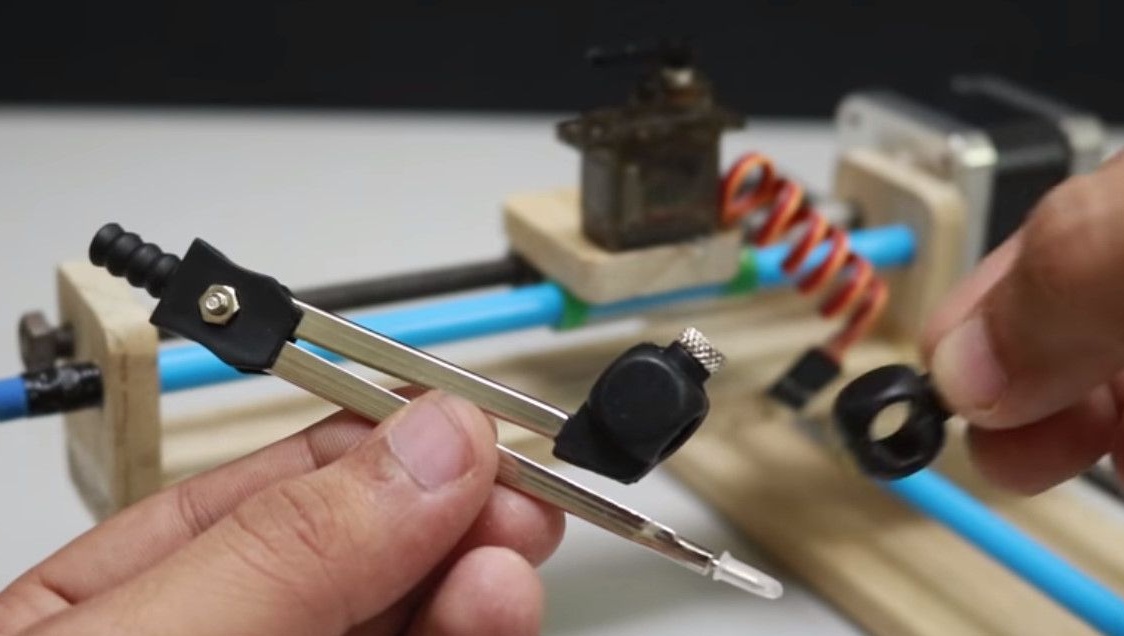
8. Ang may-hawak para sa lapis mula sa kumpas
9. Isang hairpin na may ilang mga mani at tagapaghugas ng pinggan.
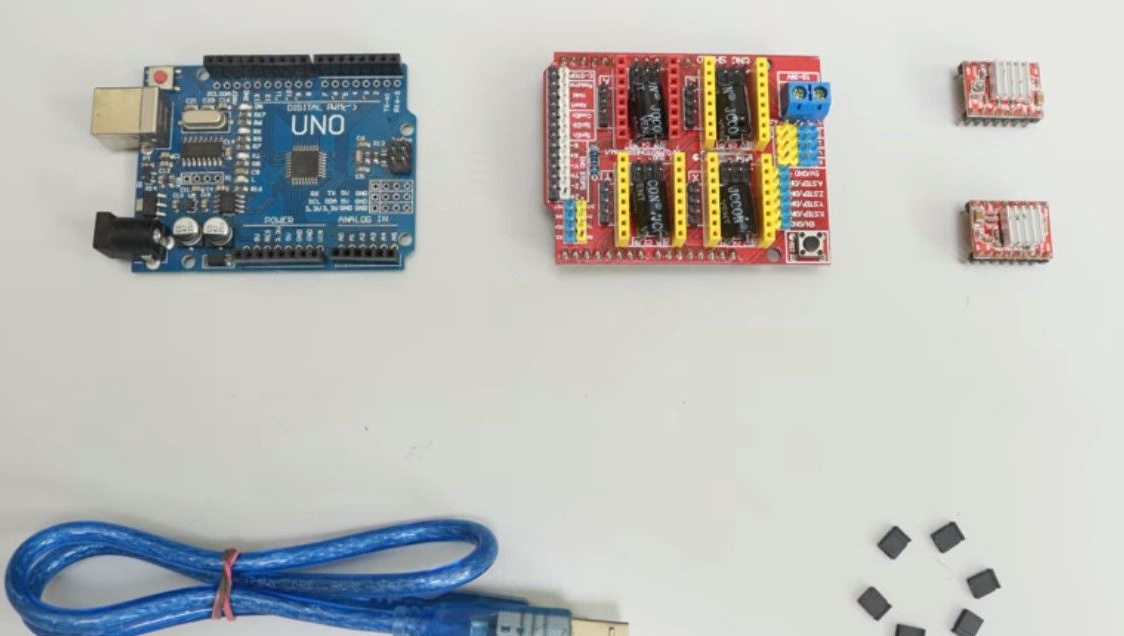
Electronic mga sangkap.
1. motor na stepper, 2 mga PC.
2.
3. Lupon ng Pagpapalawak
4. driver ng motor na stepper, 2 mga PC.
5. Servo
6. Pinagmulan ng baterya o kapangyarihan.
Pagsusulat ng software Ben box.
Kaya, ang may-akda ay nagpapatuloy sa pagpupulong.
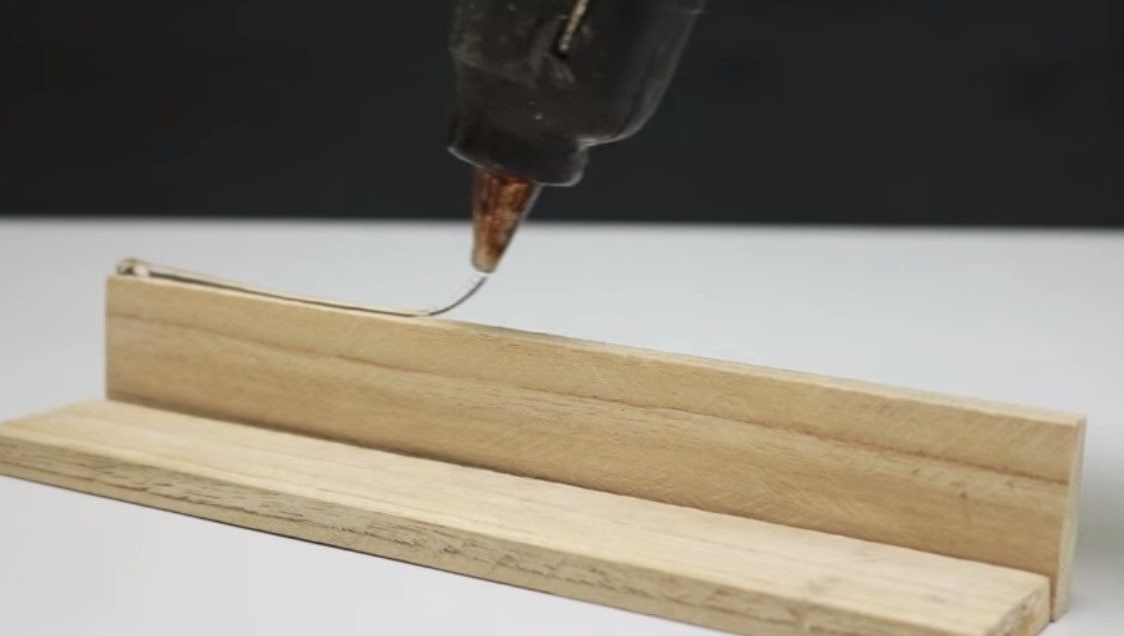
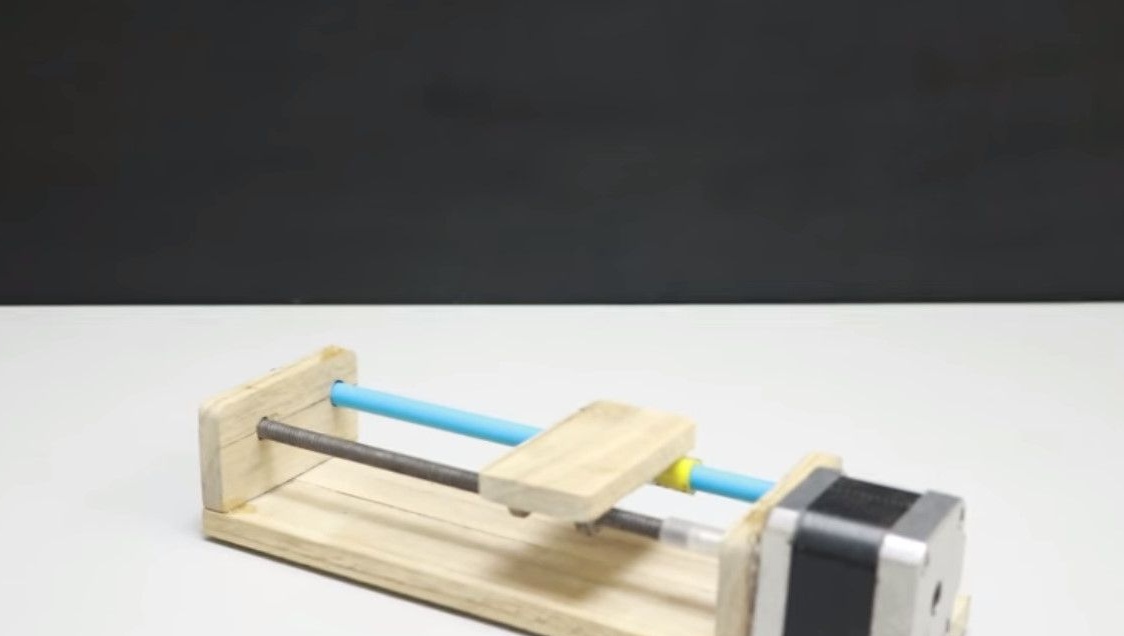
Una sa lahat, nagsisimula siyang mangolekta ng base para sa vertical coordinate axis Y.
Inihanda na niya ang dalawang tabla.


Ngunit ang kanilang lapad para sa base ay hindi sapat, kaya pinapikit niya ang mga ito gamit ang isang glue gun.

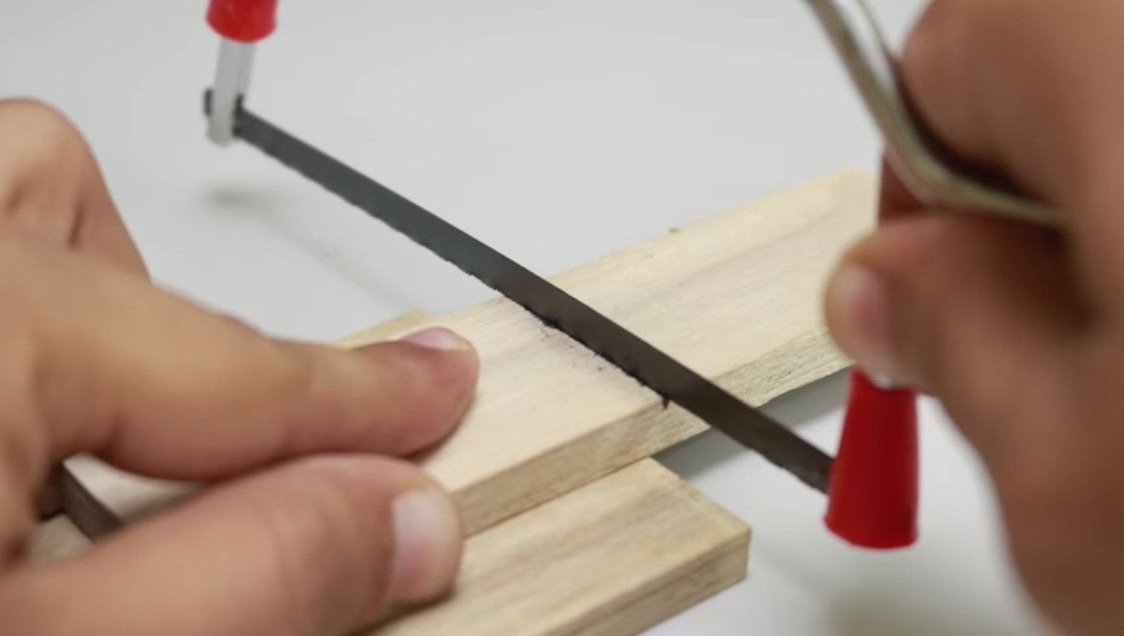
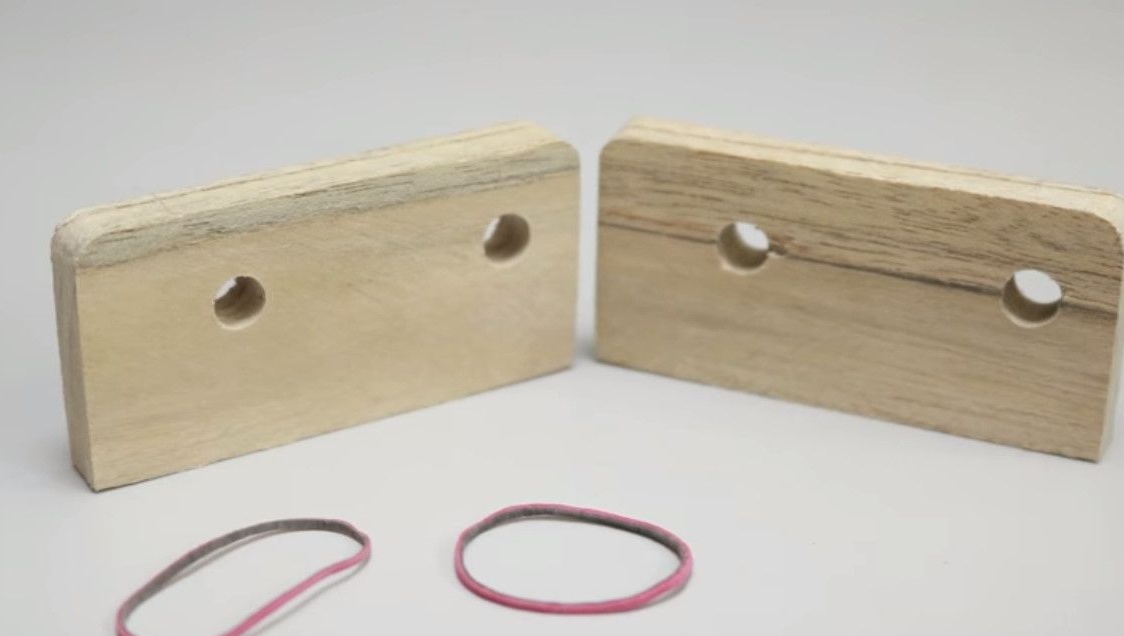
Susunod, kailangan mong gumawa ng dalawang racks kung saan mai-mount ang bisagra at baras. Upang gawin ito, minarkahan ang dalawang bloke sa lapad ng platform.

At pinutol ang mga ito sa isang jigsaw.

Markahan ang linya kung saan mag-drill hole.

Upang ang mga butas ay magkakasabay, tinangay niya ang parehong mga workpieces na may mga goma na goma. At nag-drill siya gamit ang isang ordinaryong drill.
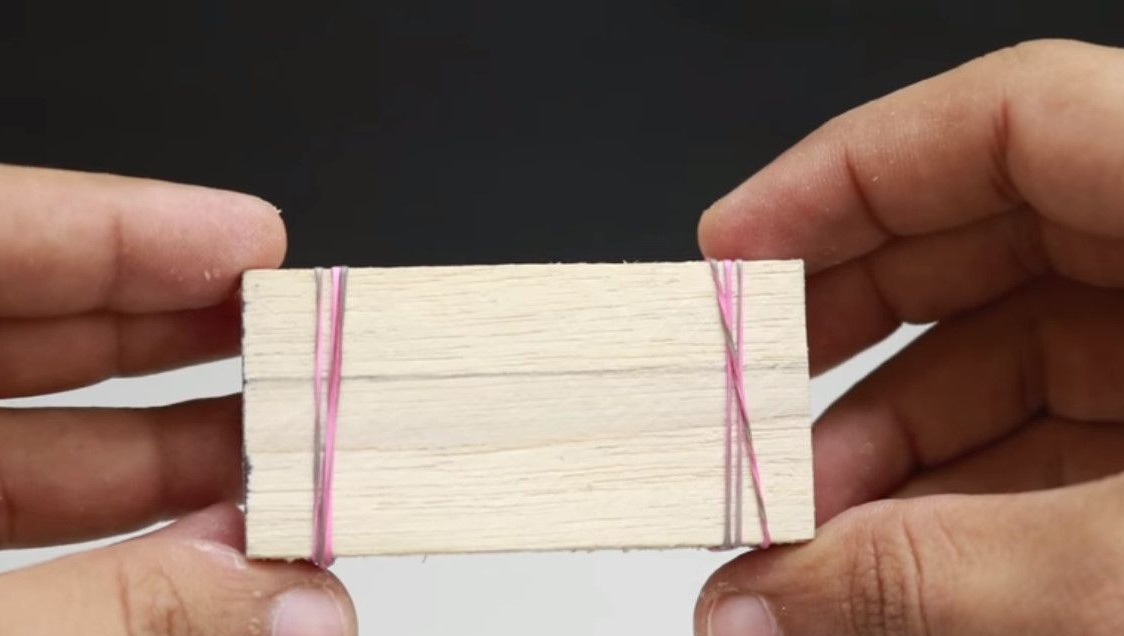


Ito ang mga rack na nakuha.
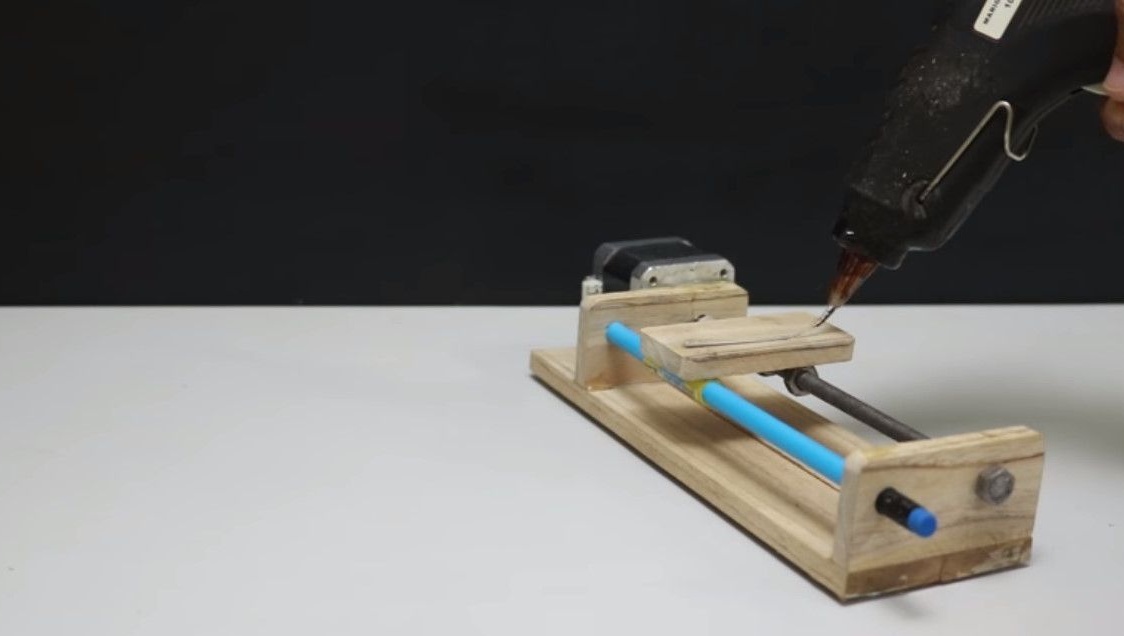
Nalalapat ngayon ang mainit na natutunaw na malagkit sa base at mai-install ang mga rack.



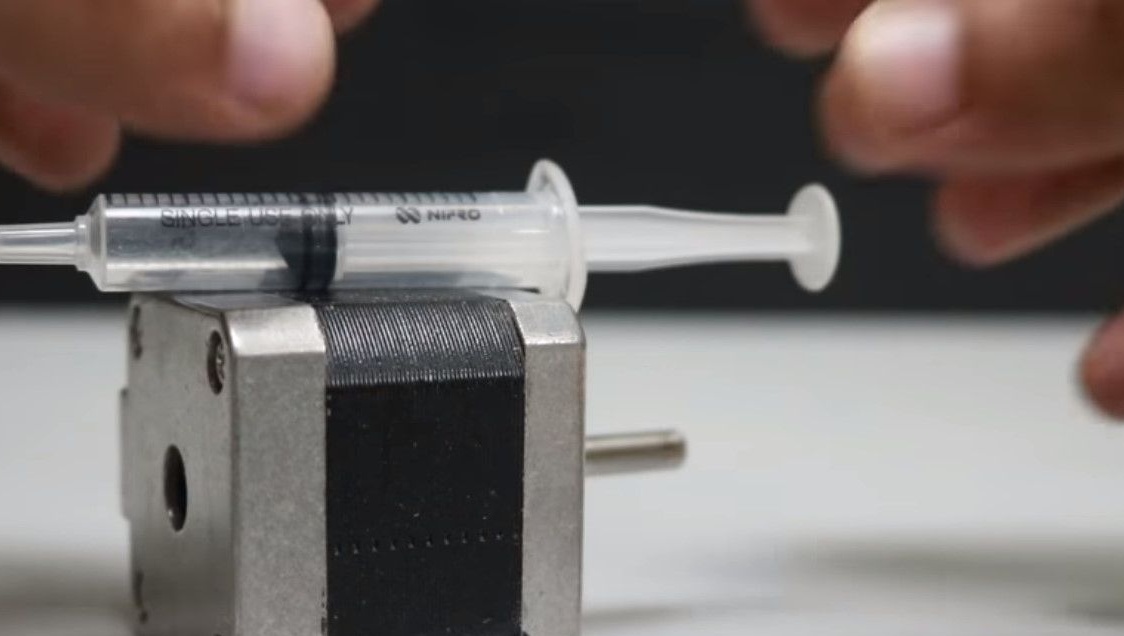
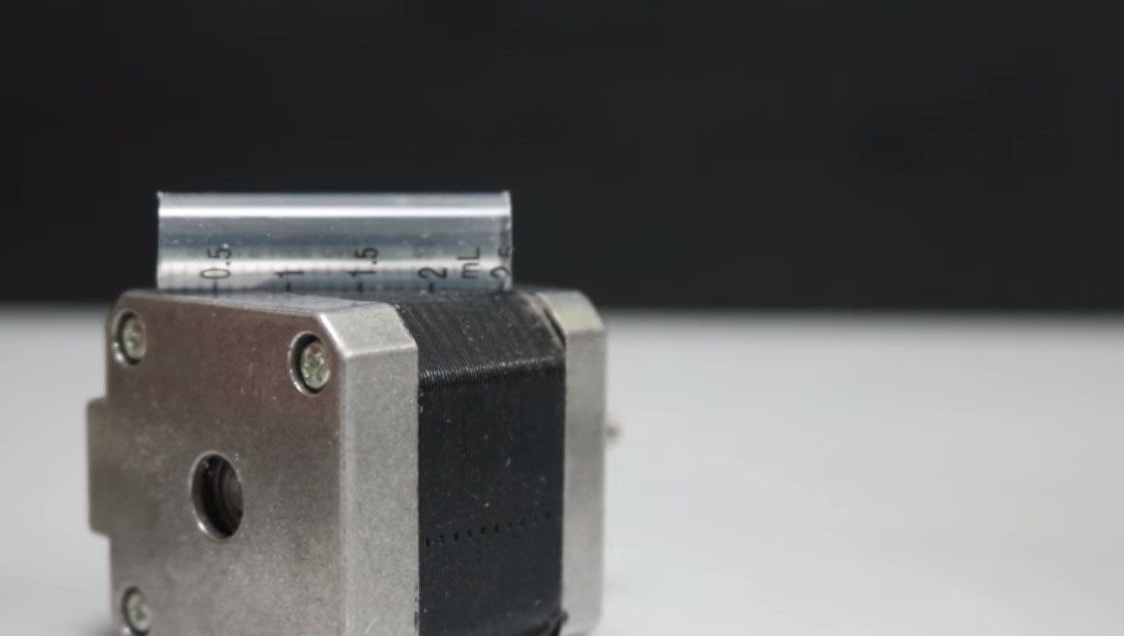
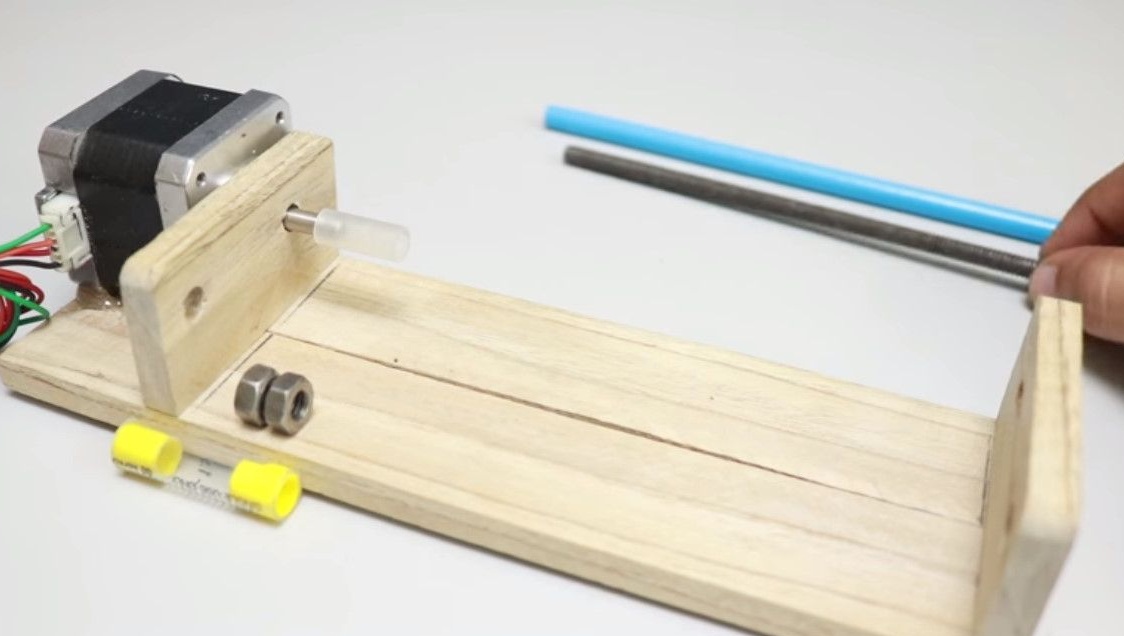
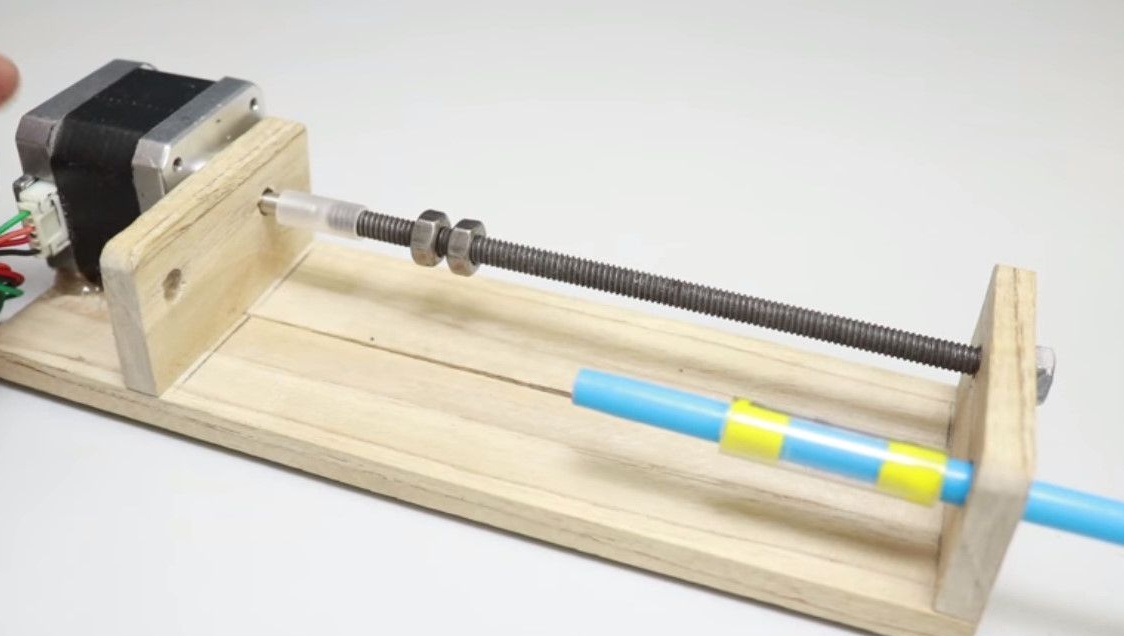
Dumating ang pagliko ng pag-install ng isang stepper motor. Natunaw muli ang mainit.



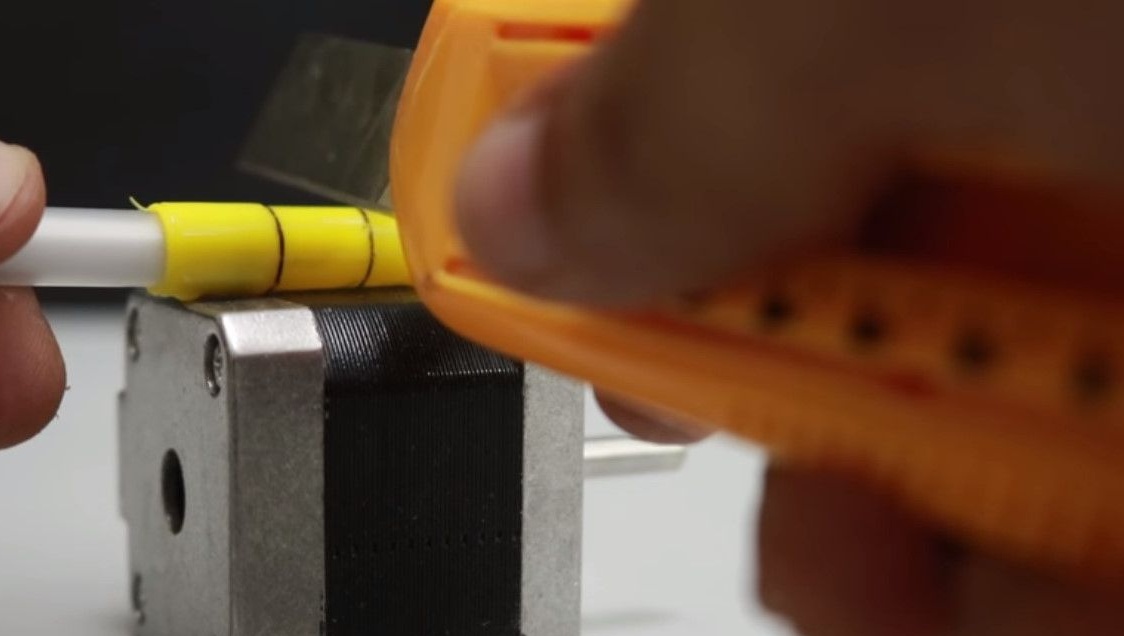
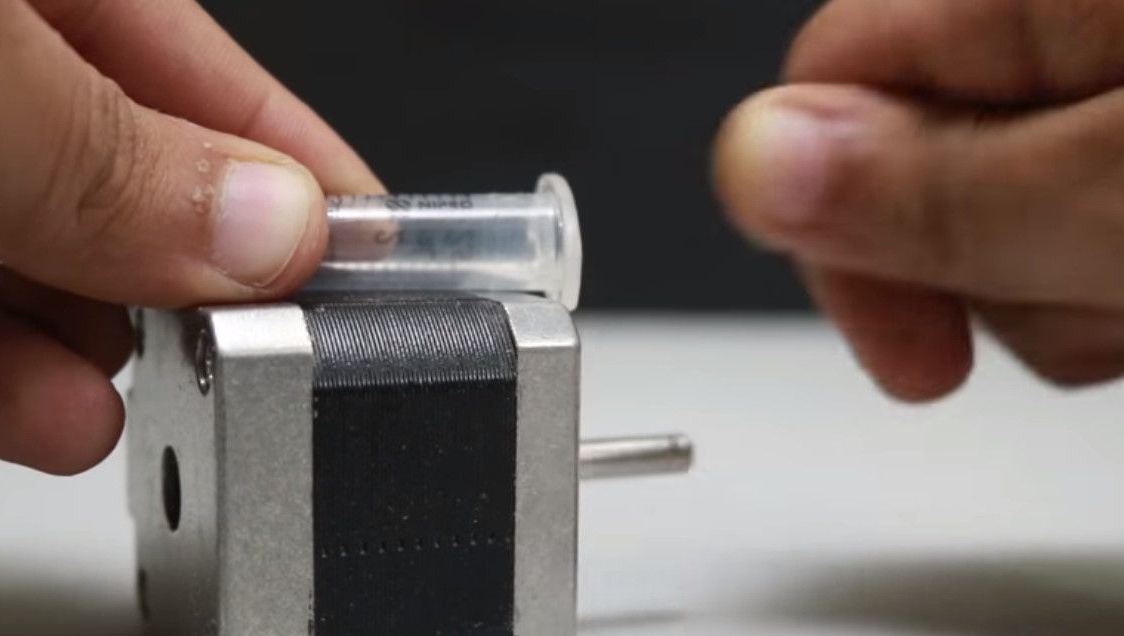
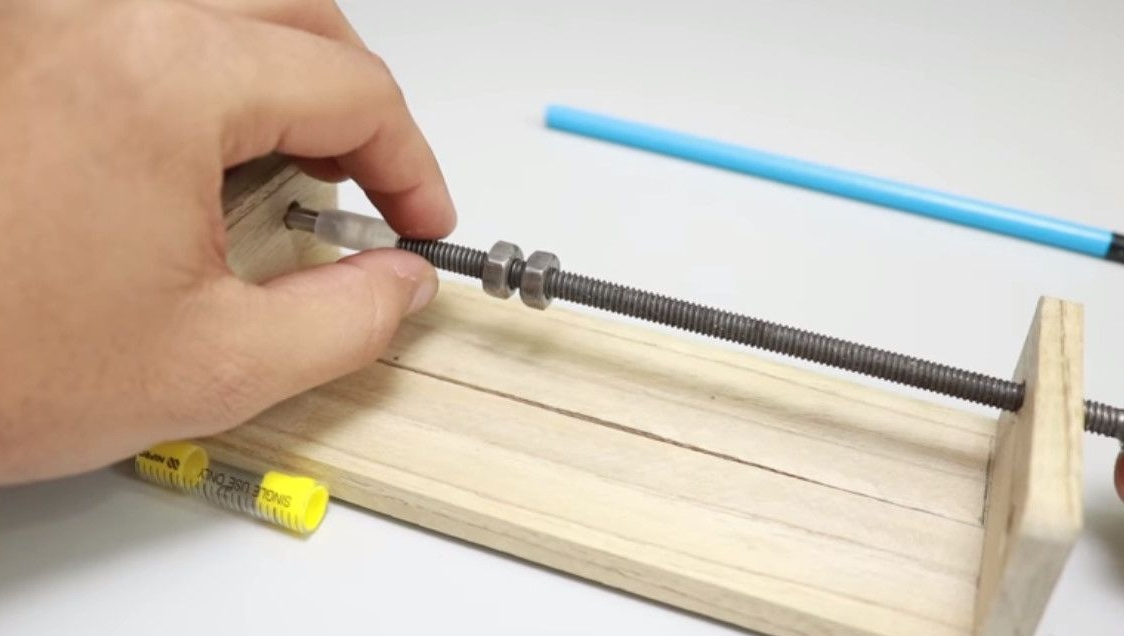
Upang maikakabit ang stud sa motor shaft, ginagamit niya ang takip mula sa karayom ng isang maginoo syringe.
Hiniwa ang nais na piraso.


At inilalagay ito sa motor shaft.

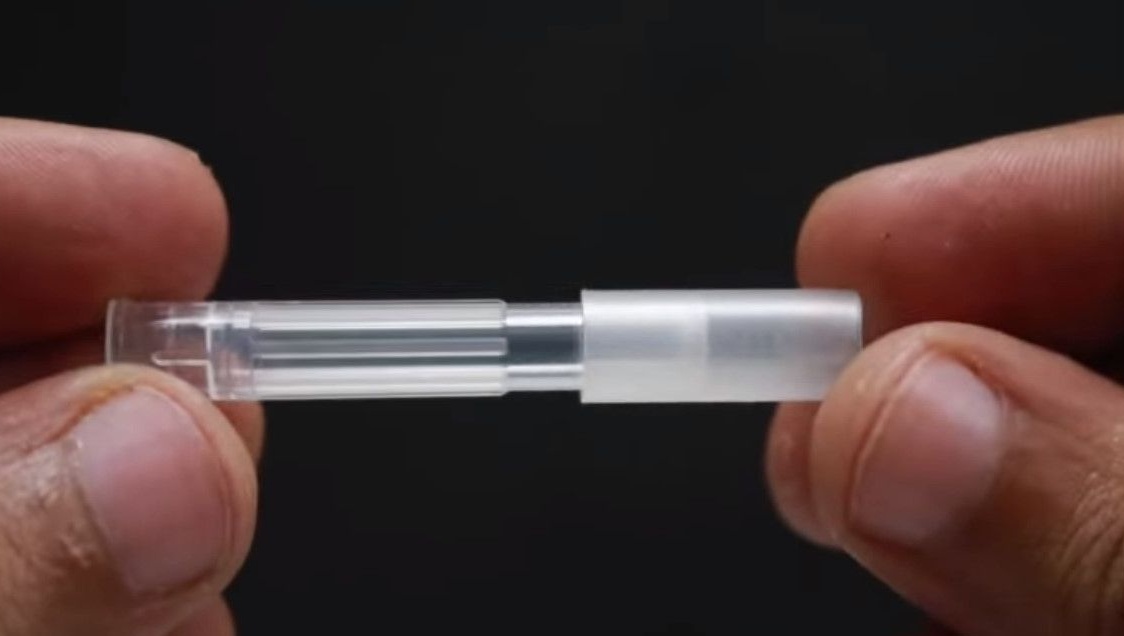
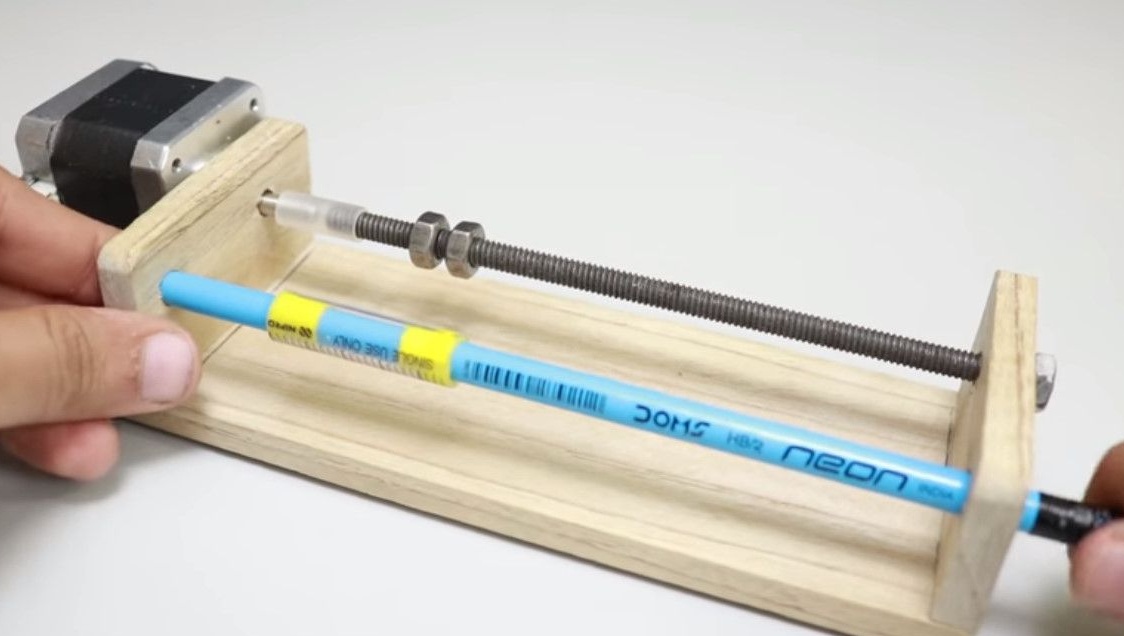
Para sa slider na hahawak ng karwahe sa bisagra, gumagamit ito ng isang takip ng ballpoint pen.


Pinuputol nito ang dalawang silindro.
Ang isa pang slider ay nangangailangan ng isang hiringgilya, tinatanggal nito ang piston.
At pinuputol ang isang silindro sa labas nito.

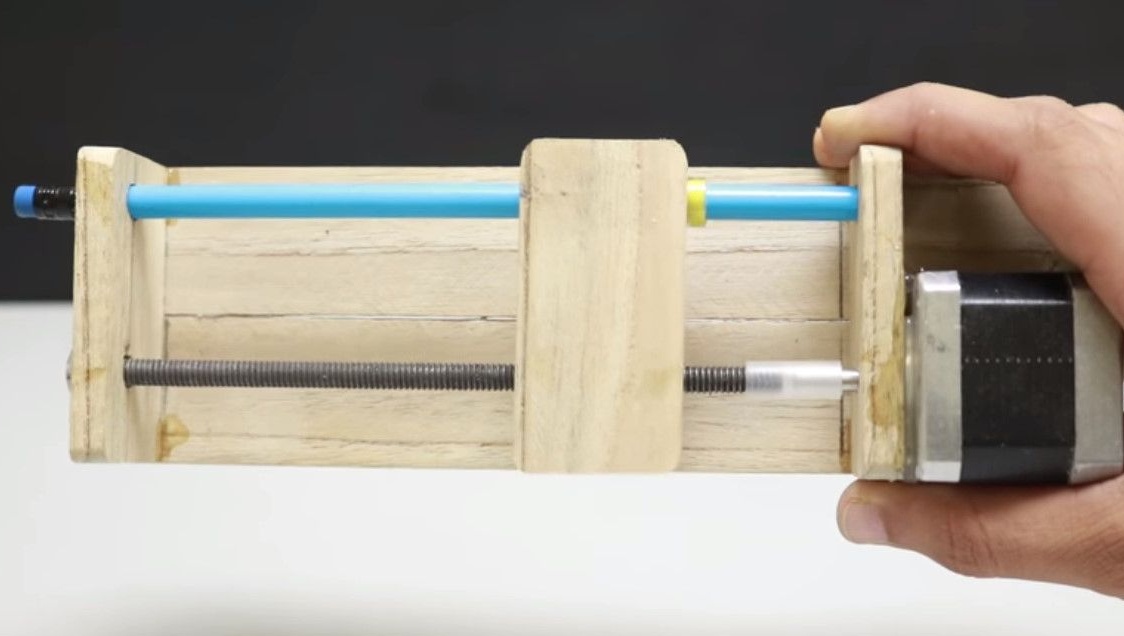
Ngayon ang runner ay nangongolekta ng kanyang sarili. Kakailanganin nila ng dalawa, dalawang palakol.
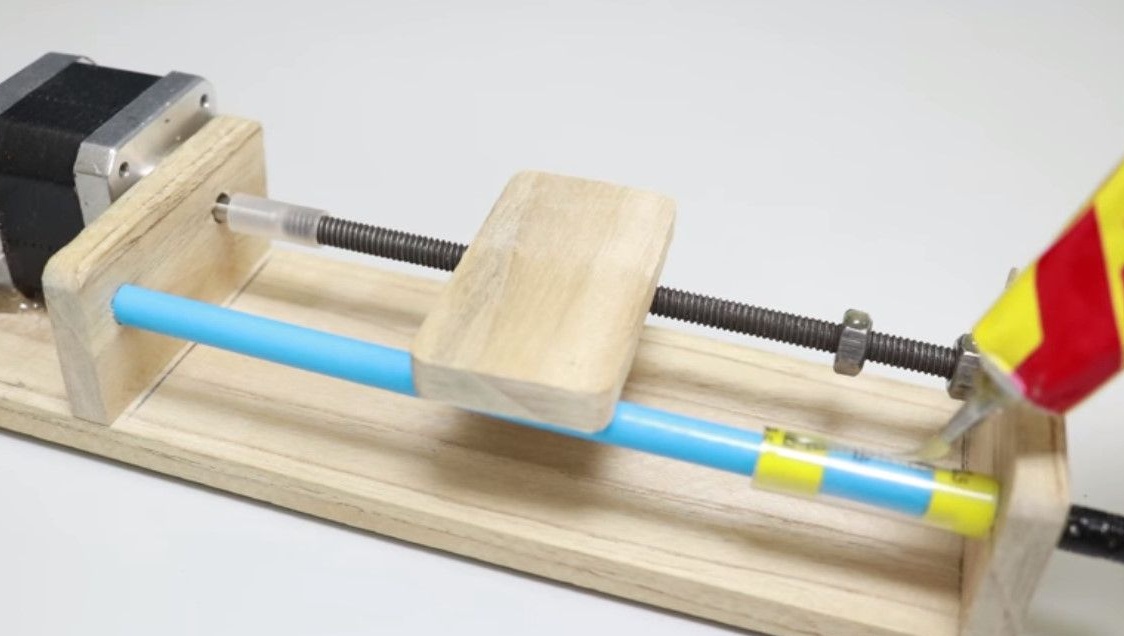
Ngayon ay kinokonekta nito ang stud sa motor shaft, pagkakaroon ng pre-screwed dalawang nuts, kumokonekta sila sa karwahe at ilipat ito kapag ang stud ay umiikot.

Nag-install ng bisagra sa pamamagitan ng paglalagay sa slider.
Nag-install ng mga mani sa buong lapad ng karwahe at kola na may pandikit ang isa sa mga mukha sa bawat isa, mahalaga na hindi makuha sa thread!
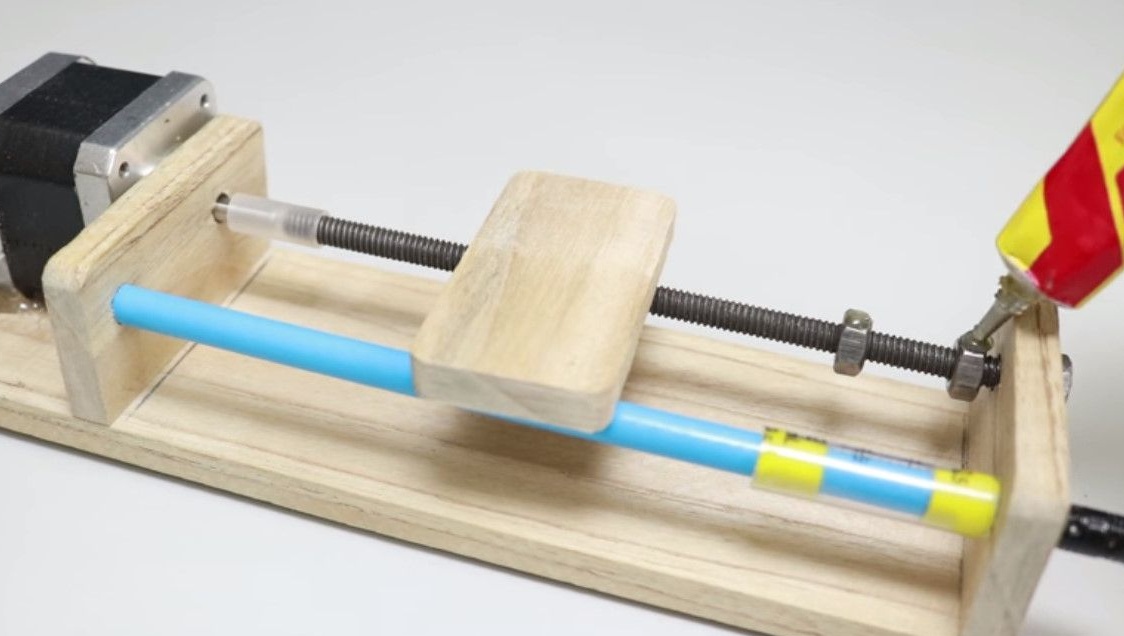
Nag-aaplay ng pandikit sa isang bahagi ng runner.
Dumikit ang karwahe sa kanila.
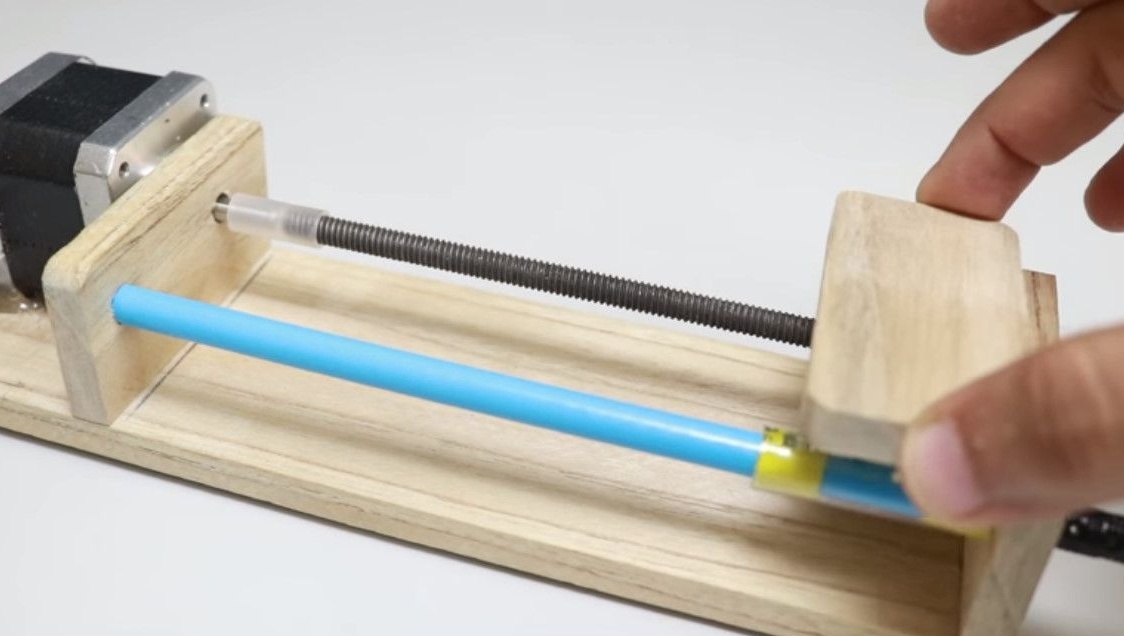
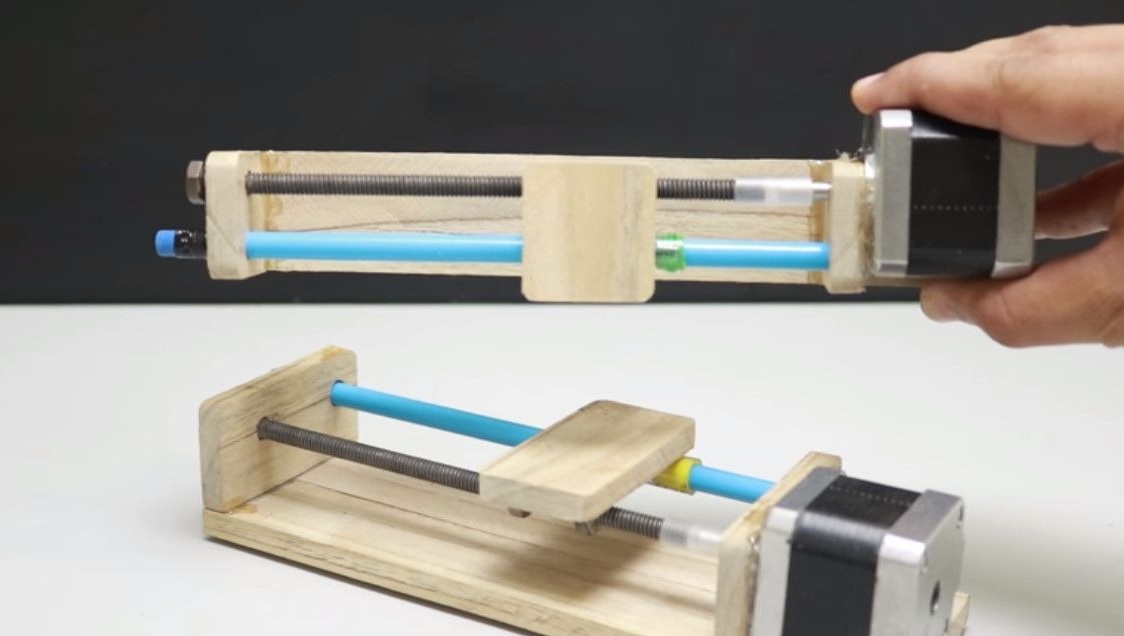
Ang isang drive ay handa na. Ang pangalawa ay ginagawa nang eksakto pareho, mas maliit lamang sa lapad.
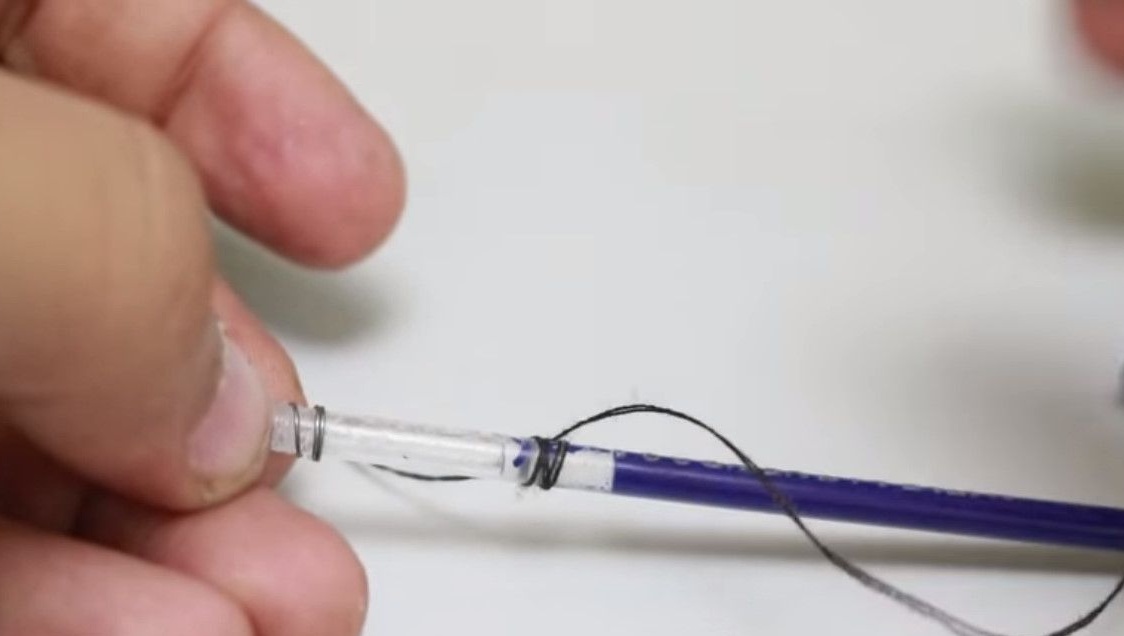
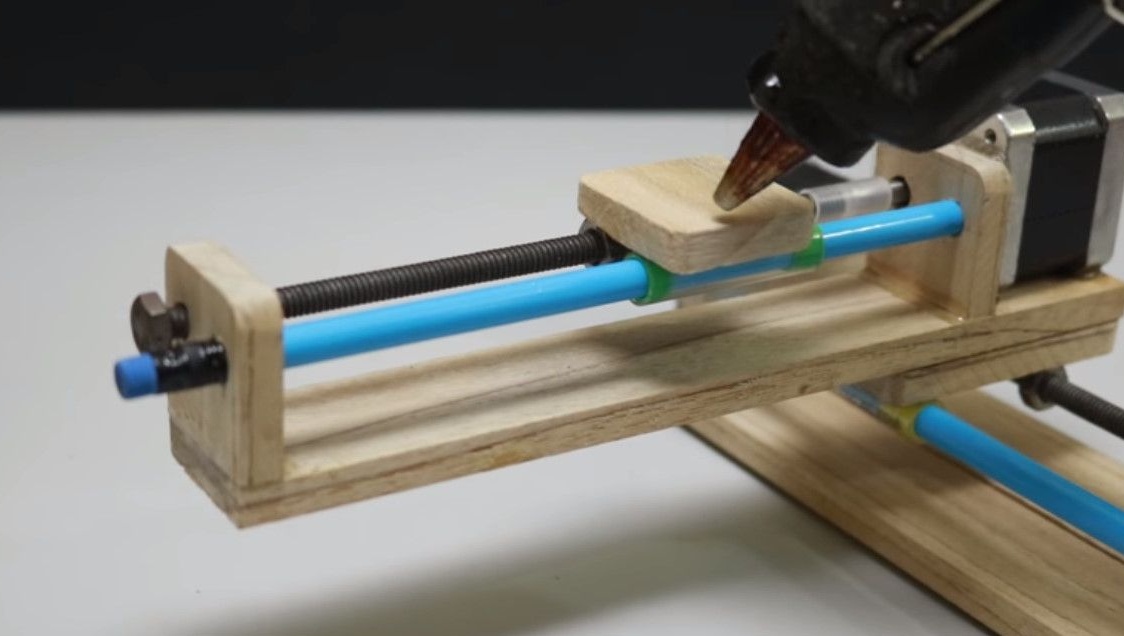
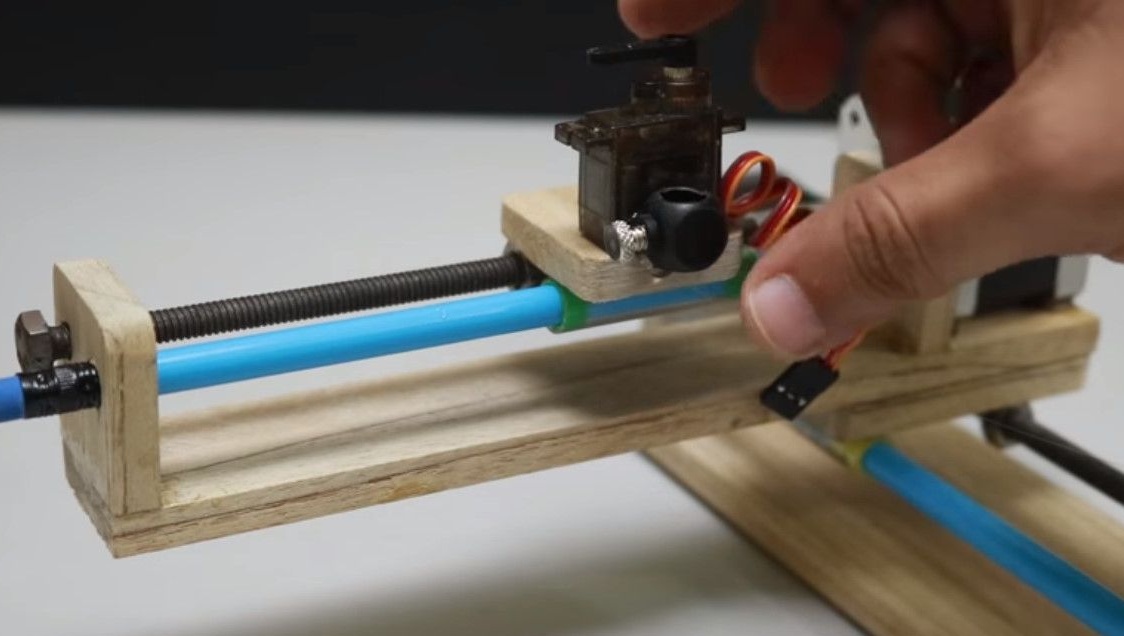
Sa yugtong ito, kailangan mong gawin ang aktwal na aparato sa pagsulat mula sa panulat.

Parses ito, inaalis ang pamalo, pinaikling ito ng kaunti.


Inilalagay ang tagsibol mula sa bukal ng bukal sa likod ng baras.


Ang pagkakaroon ng drill ng isang hole hole sa itaas na bahagi ng katawan, sinulid ito ng isang thread.


Itali ang thread sa tuktok ng baras, sa ilalim lamang ng butas mismo, dahil ang thread ay itaas ang pamalo, at ibabalik ito ng tagsibol.
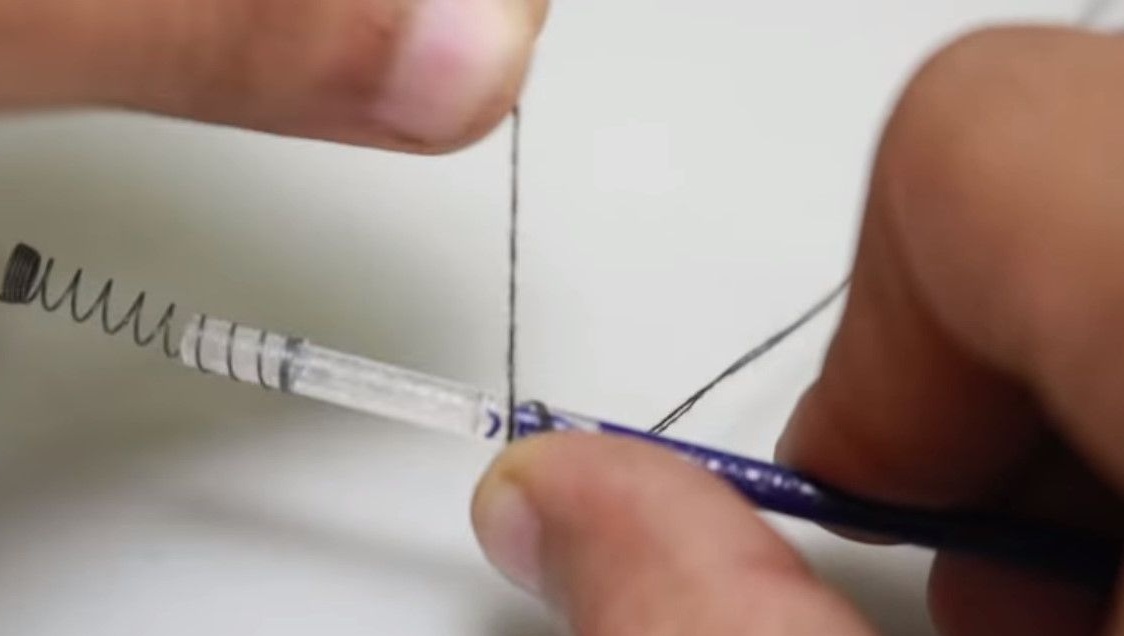
Nagtitipon ng isang hawakan, kumukuha ng isang thread.
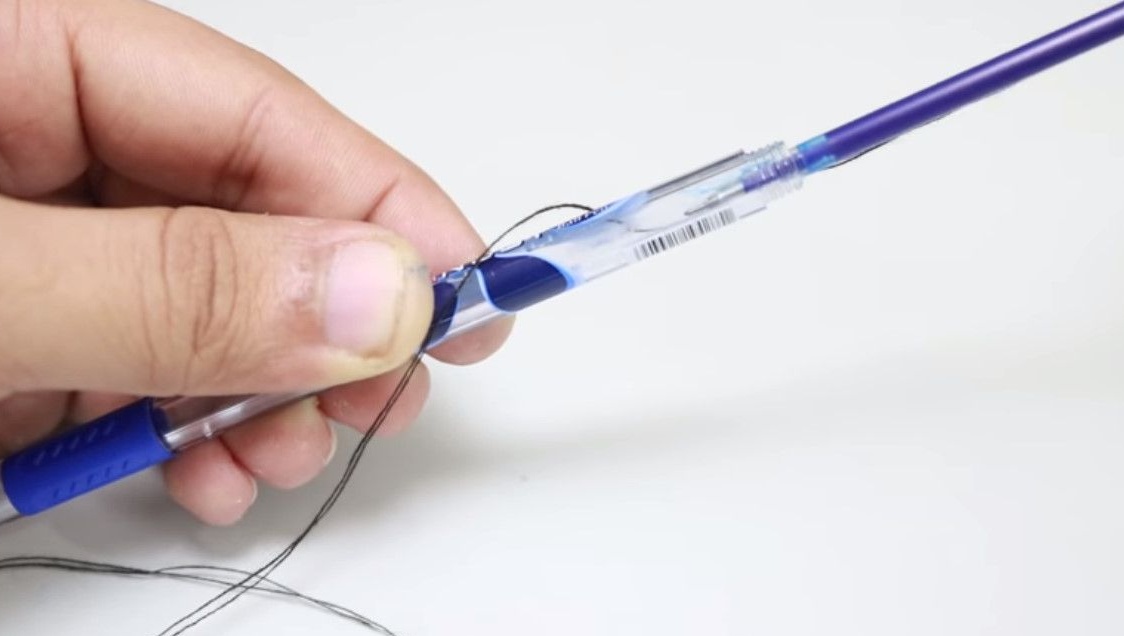
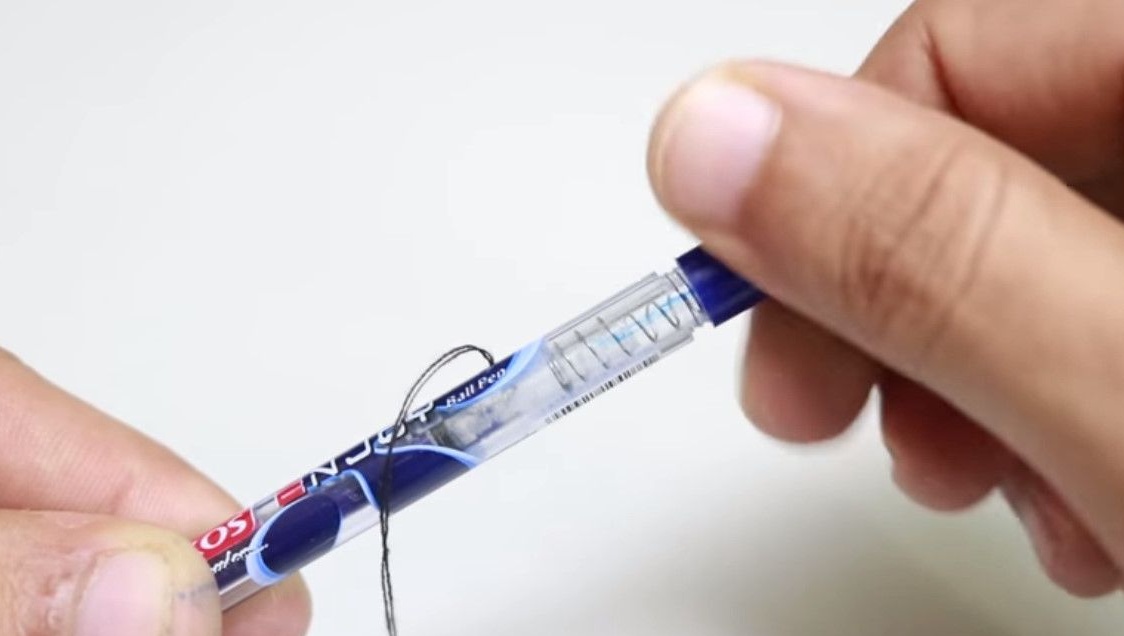
Sinusuri na kapag hinila ang thread, ang dulo ng baras ay ganap na nakatago.


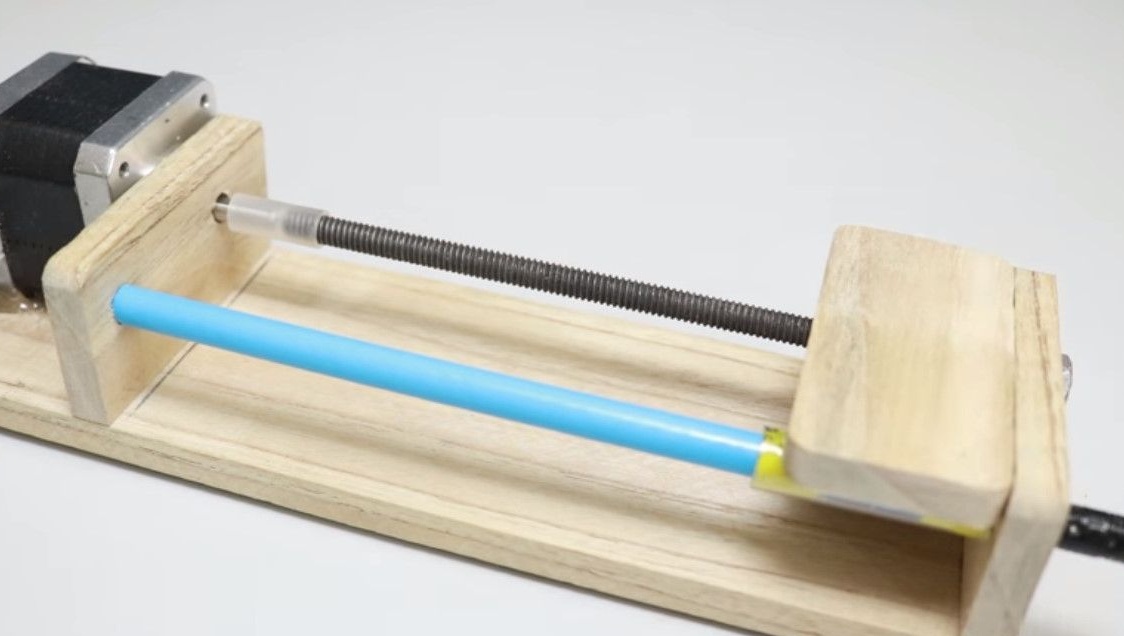
Kaya, ang parehong mga coordinate drive ay handa na.
Glues ang pahalang na axis drive sa karwahe ng vertical axis drive.
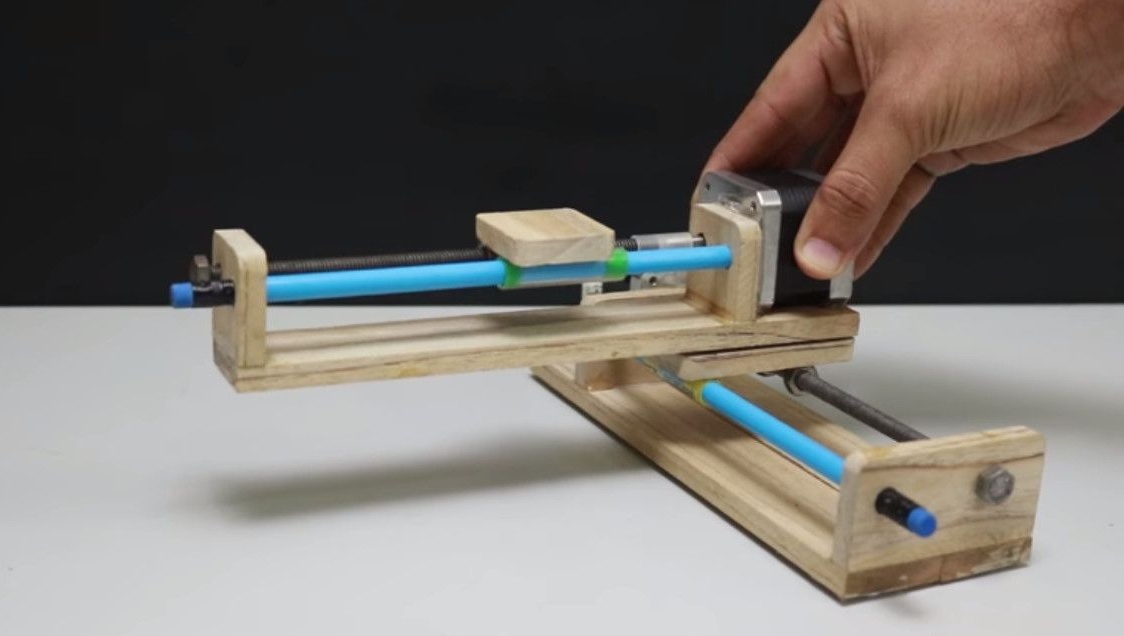
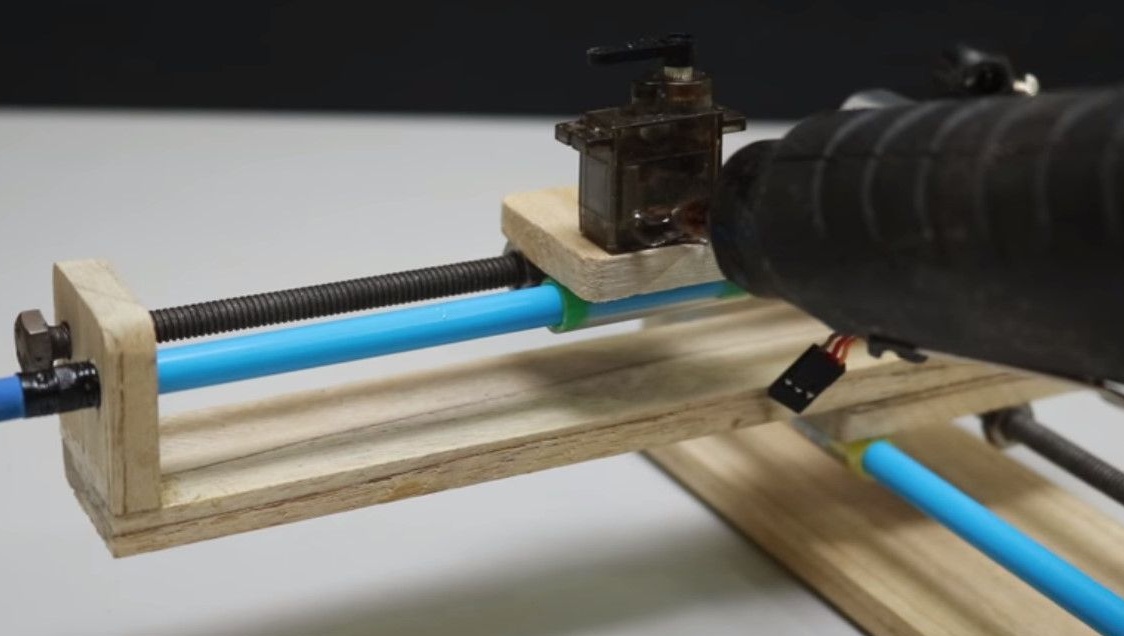
Ngayon ang servo ay nakadikit sa karwahe ng X-axis.
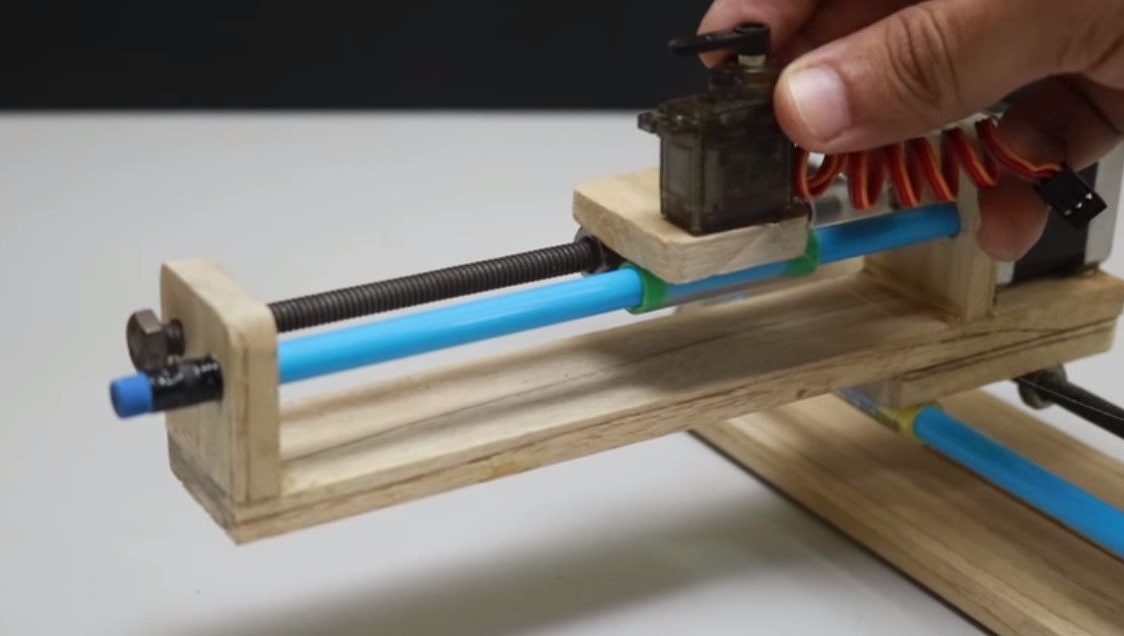
Kinuha ang may hawak ng lapis mula sa kumpas, ipikit ito sa servo.
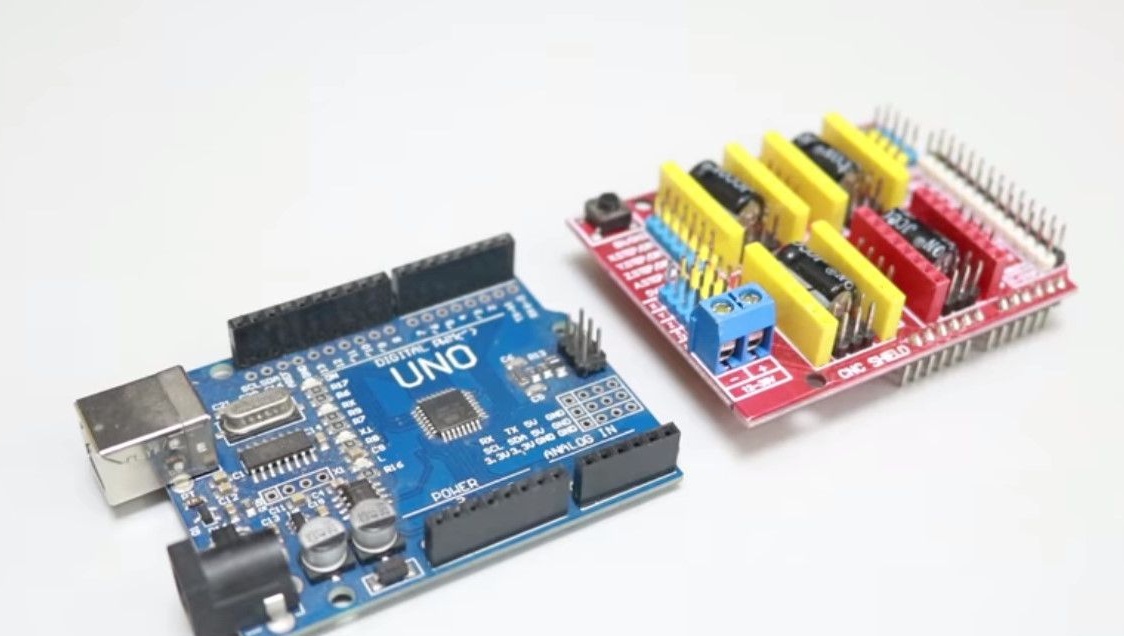
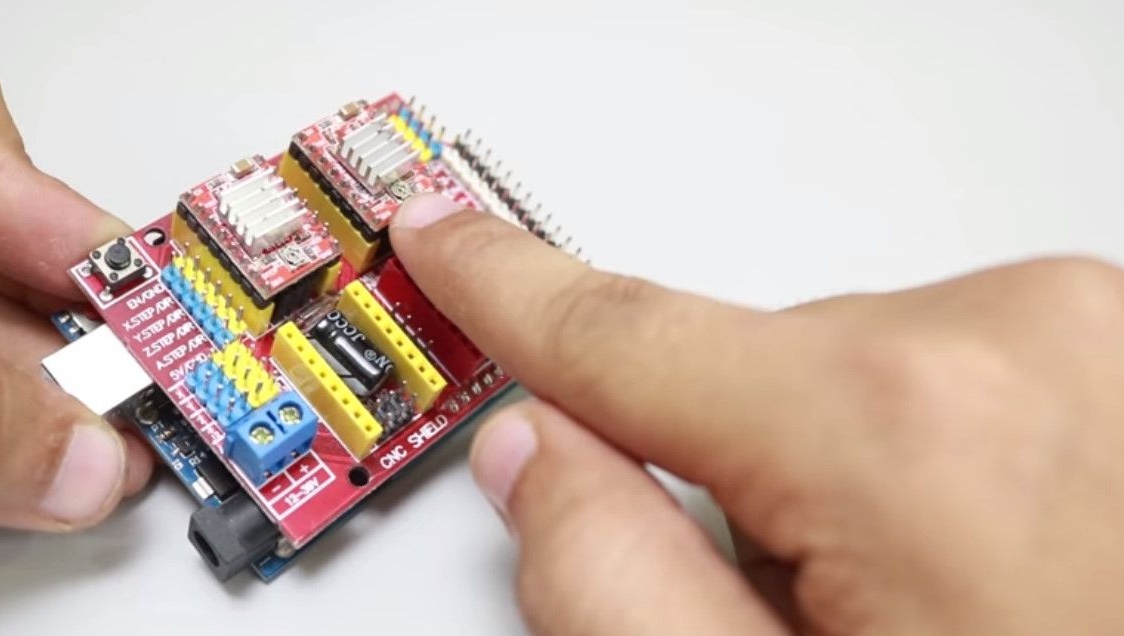
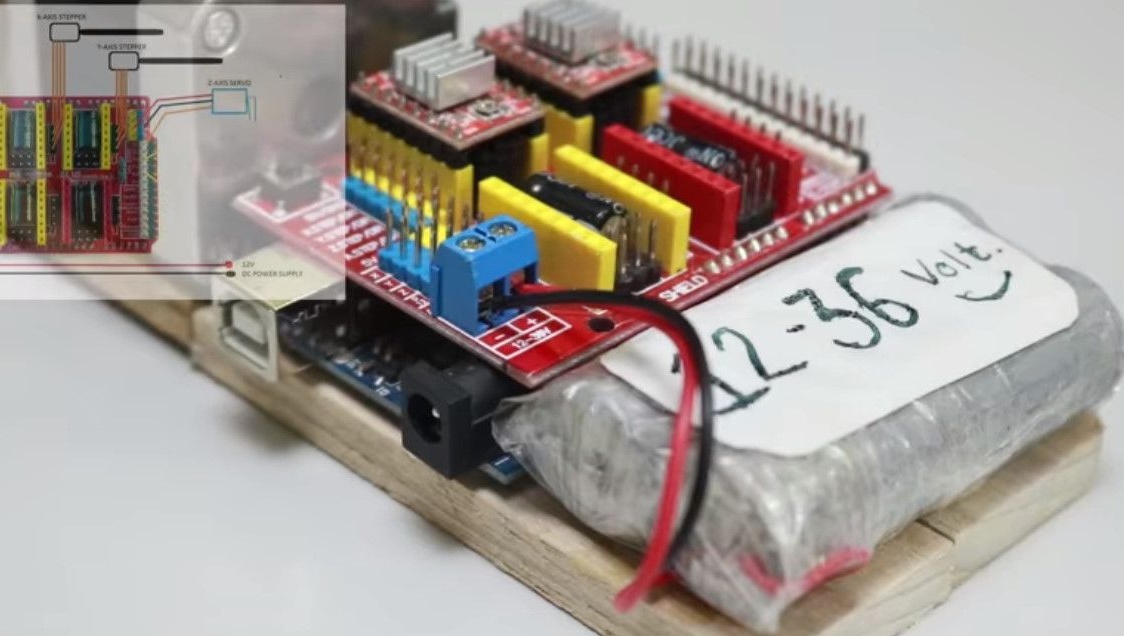
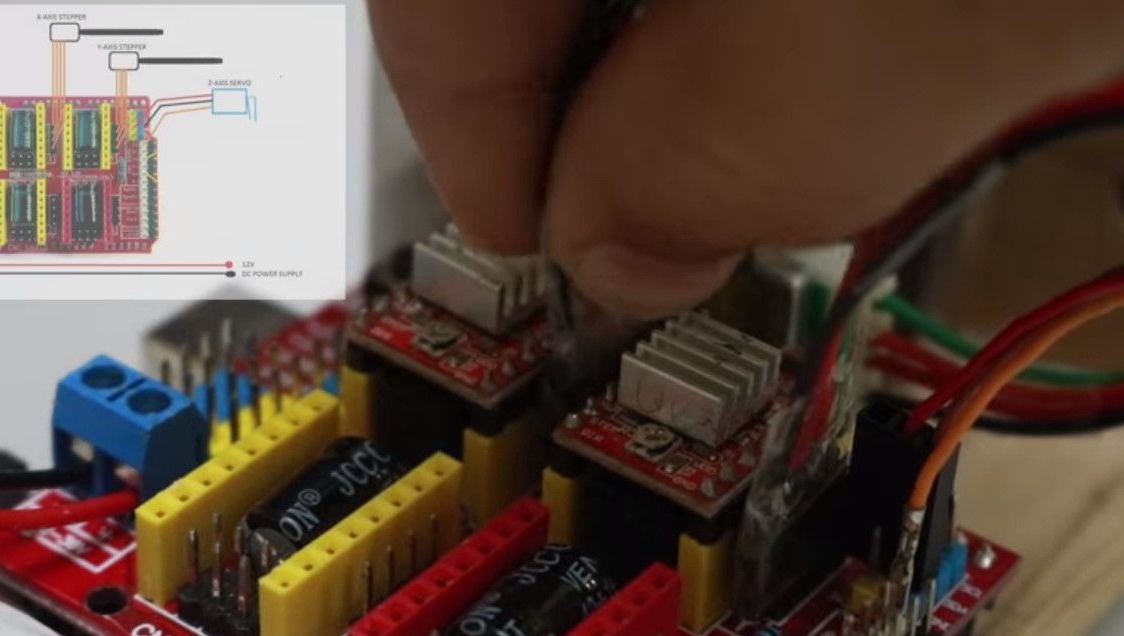
Kaya, handa na ang mga mekanika, nagpapatuloy ang may-akda sa elektronikong bahagi. Narito ang parehong mga board, dalawang motor driver, at mga jumper na may USB cable.
Kumokonekta sa arduino board sa expansion board.
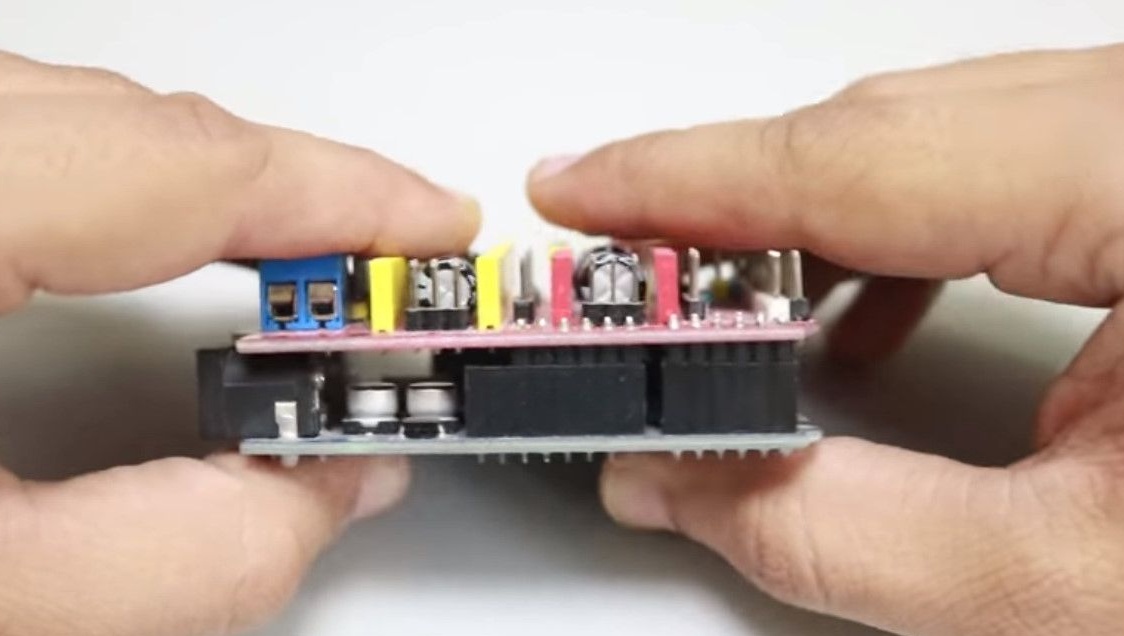
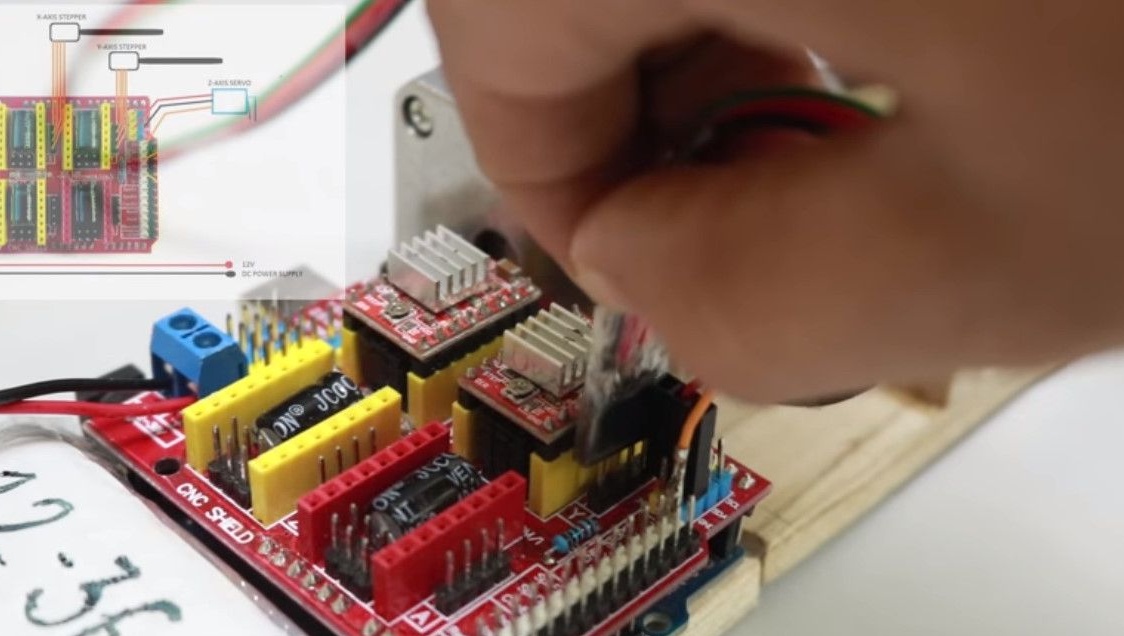
Nagtatakda ng mga jumpers.
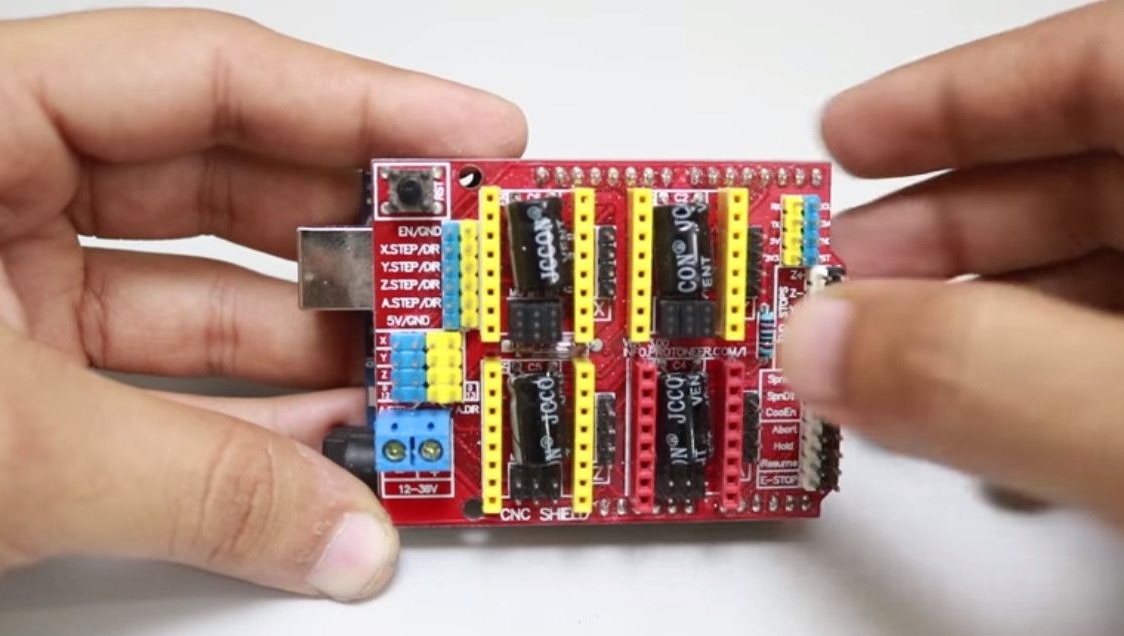
At mga driver ng engine.
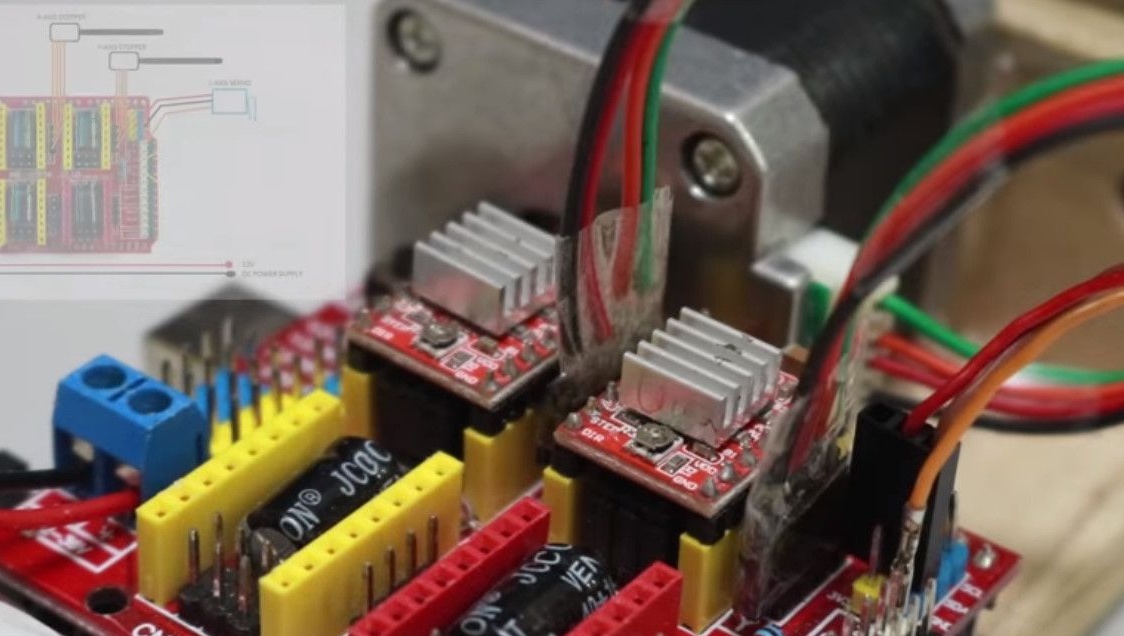
Ang pagpupulong ay nakadikit sa mainit na matunaw malapit sa pag-install.
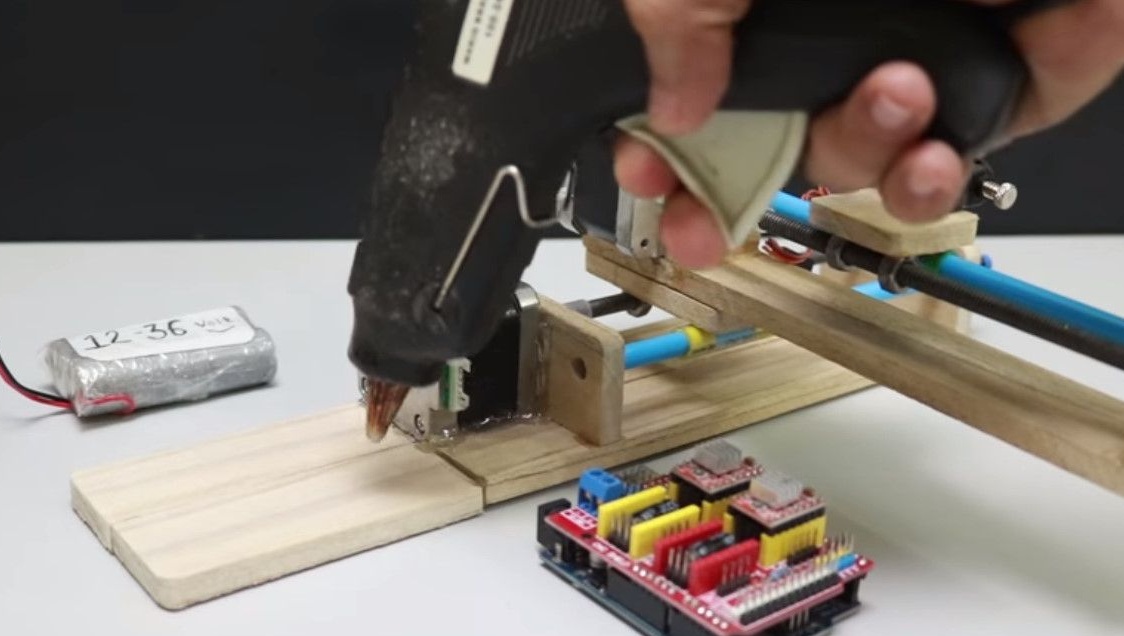
Kumokonekta sa kapangyarihan.
Servo Connector
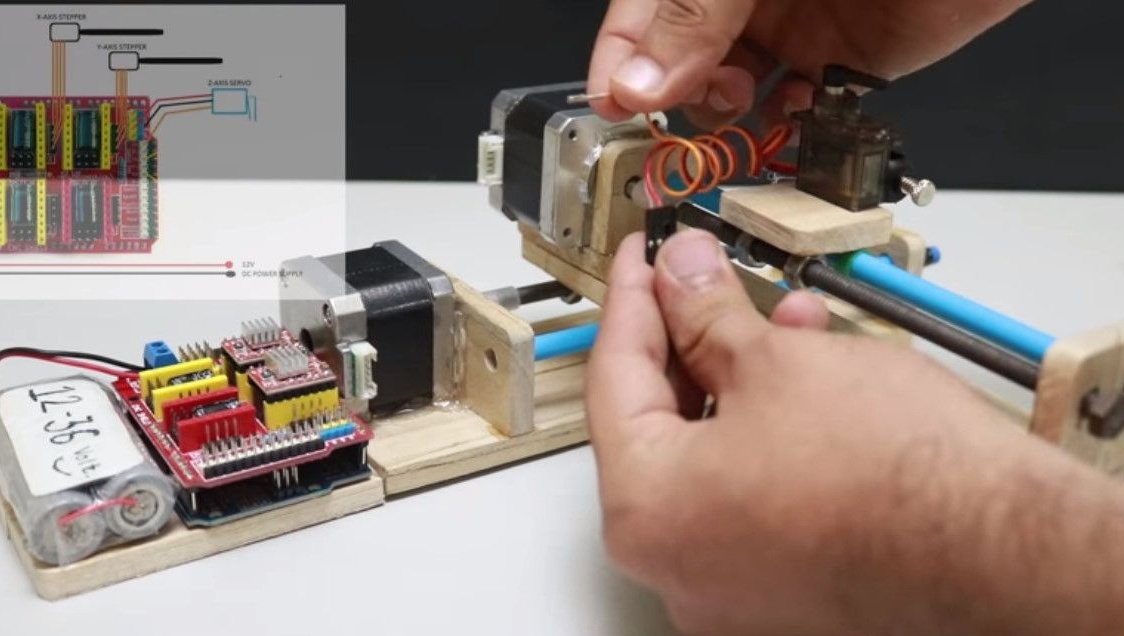
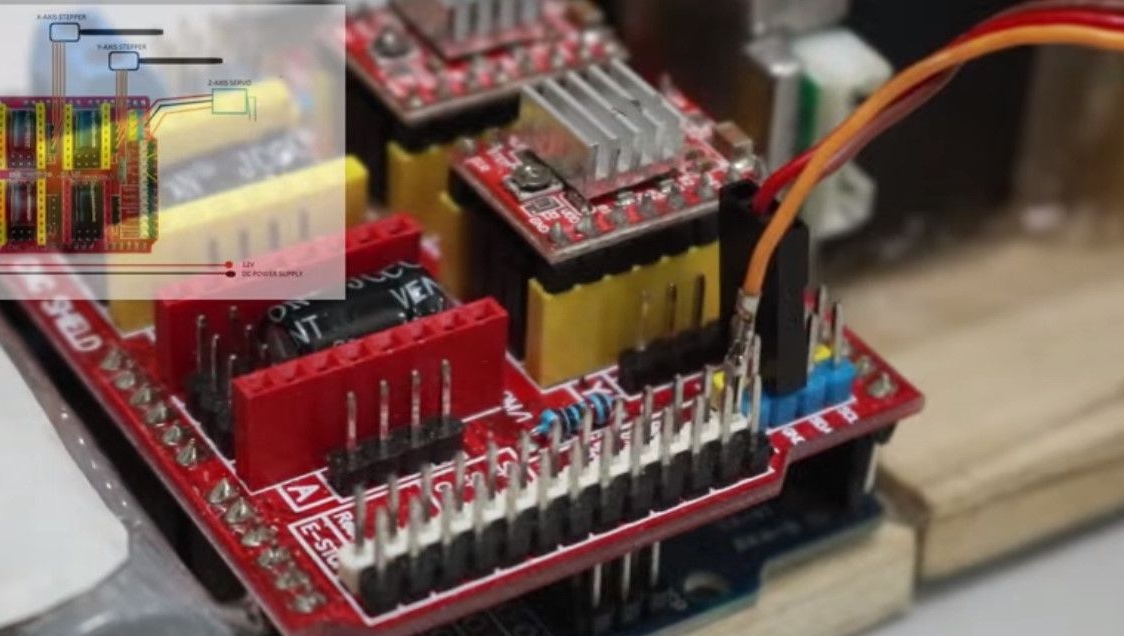
At parehong mga motor ng stepper.
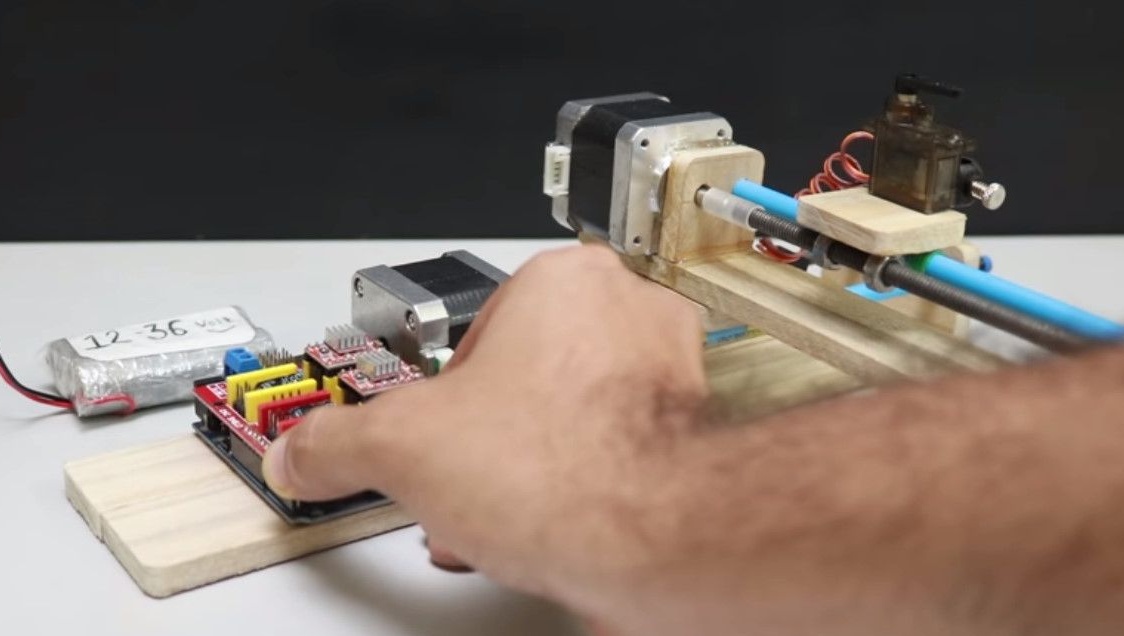
Nagpasok ng isang "aparato sa pagsulat" sa may-hawak.
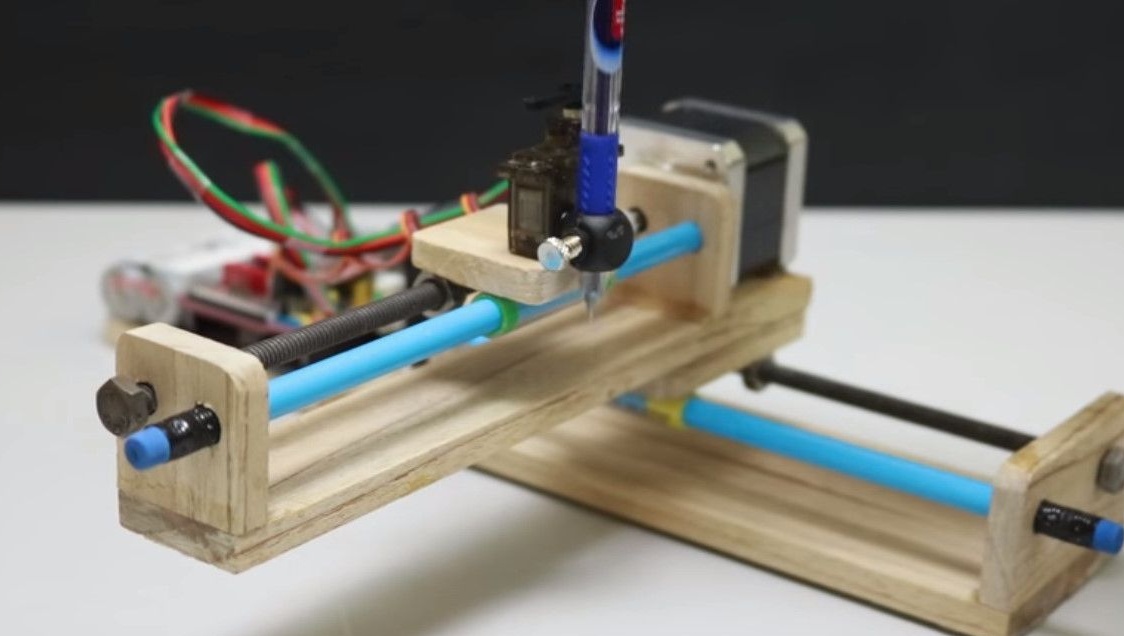
Itinatala ang thread sa servo lever.

Lahat, ang aparato ay handa nang magtrabaho, maaari kang kumonekta sa isang laptop.
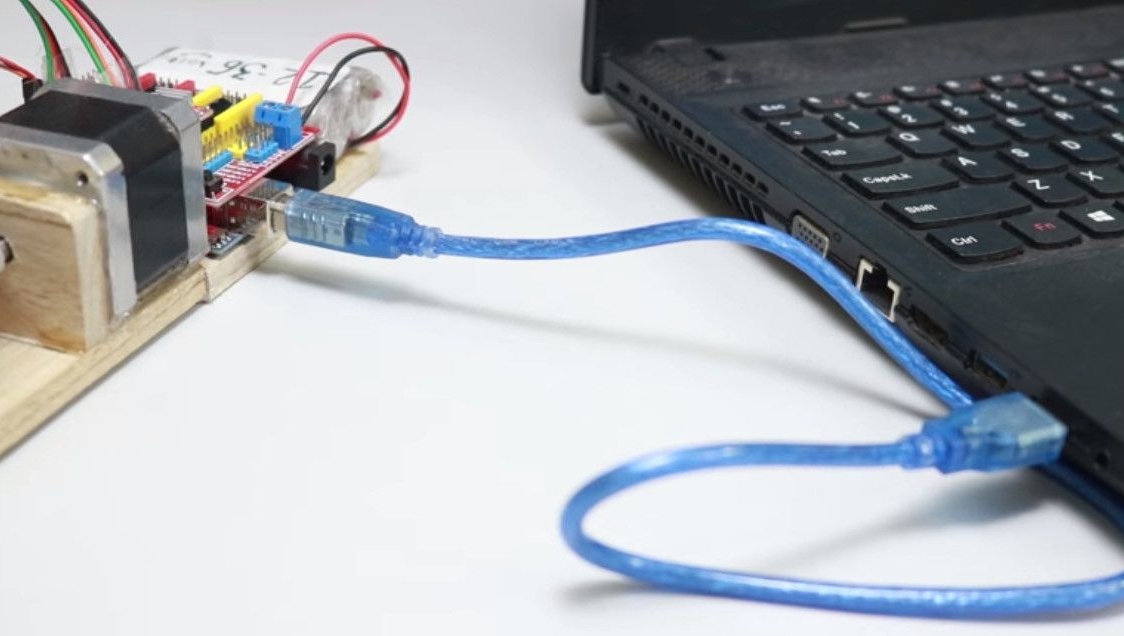
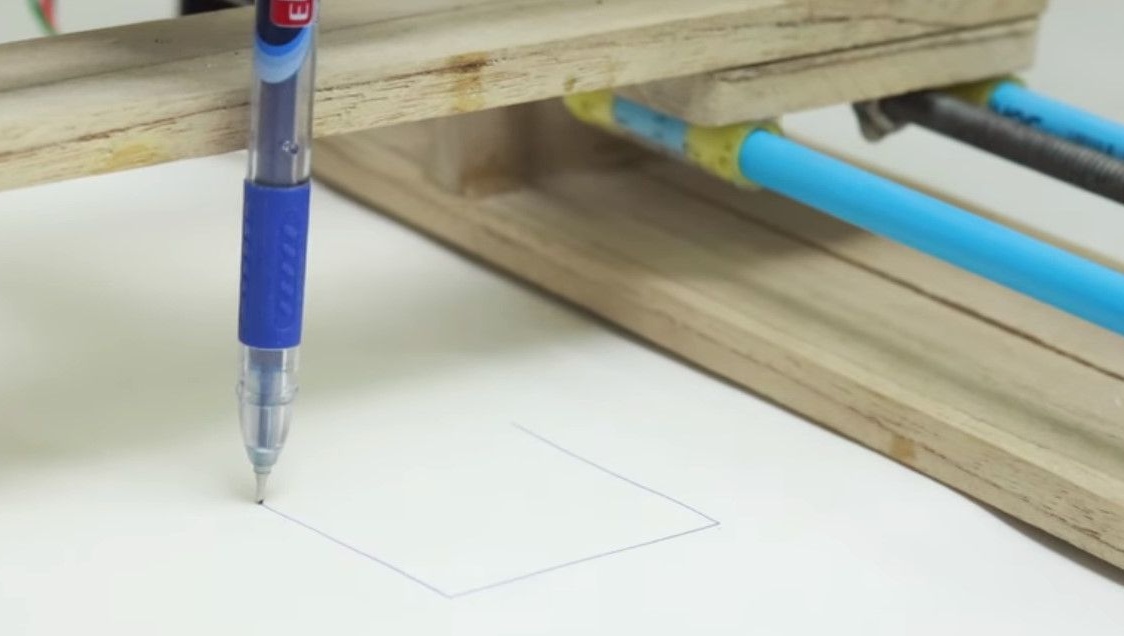
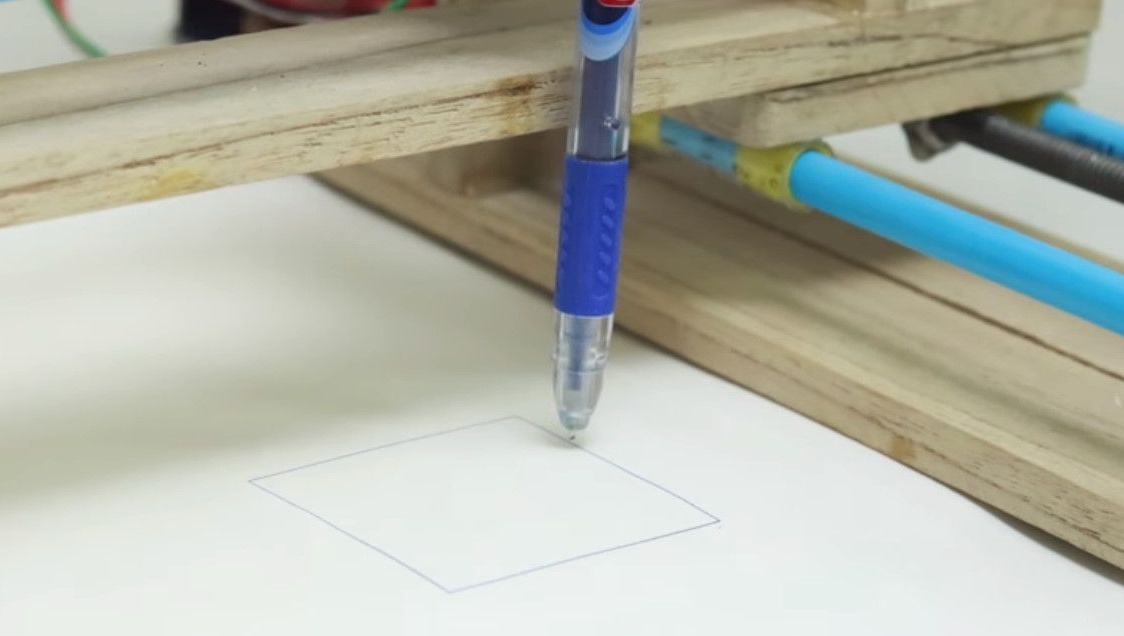
Ito ang mga pagsubok.

Kung mayroon kang anumang mga katanungan tungkol sa programming o pagsulat - ikaw dito
Salamat sa may-akda para sa simpleng disenyo at magandang ideya!
Lahat ng kawili-wili at kapaki-pakinabang gawang bahay!