


Sa artikulong ito, isasaalang-alang namin ang paggawa ng mga tagagawa ng mga Indian ng isang all-terrain na sasakyan na lumilipat kapwa sa lupa at sa tubig. Lahat ng sasakyan sa kalupaan ay binubuo ng isang lumulutang na platform na may mga gulong at isang propeller. Ang mga mekanismo ay kinokontrol ng remote control sa pamamagitan ng Arduino UNO.
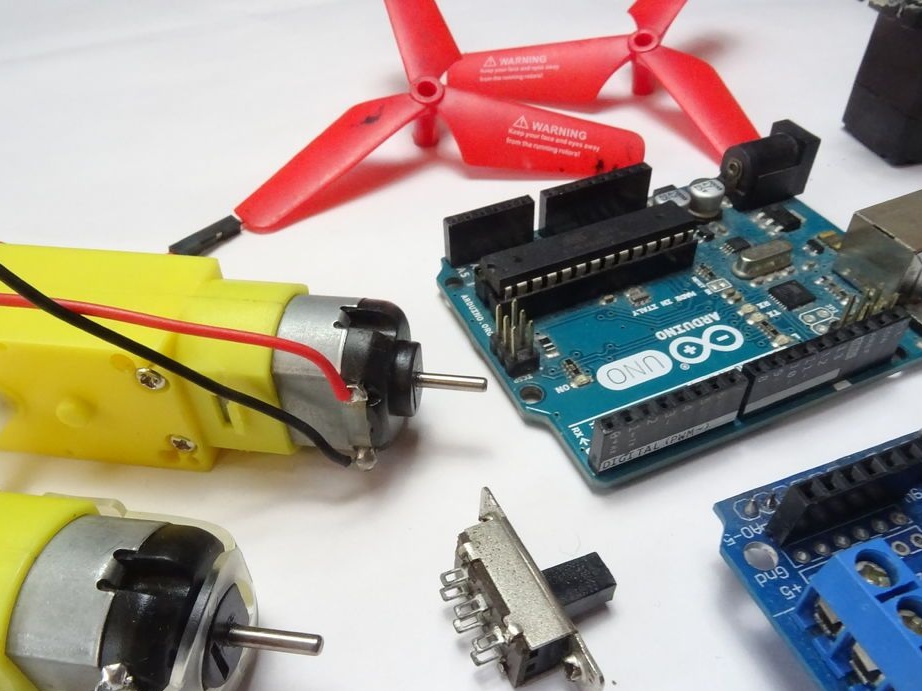
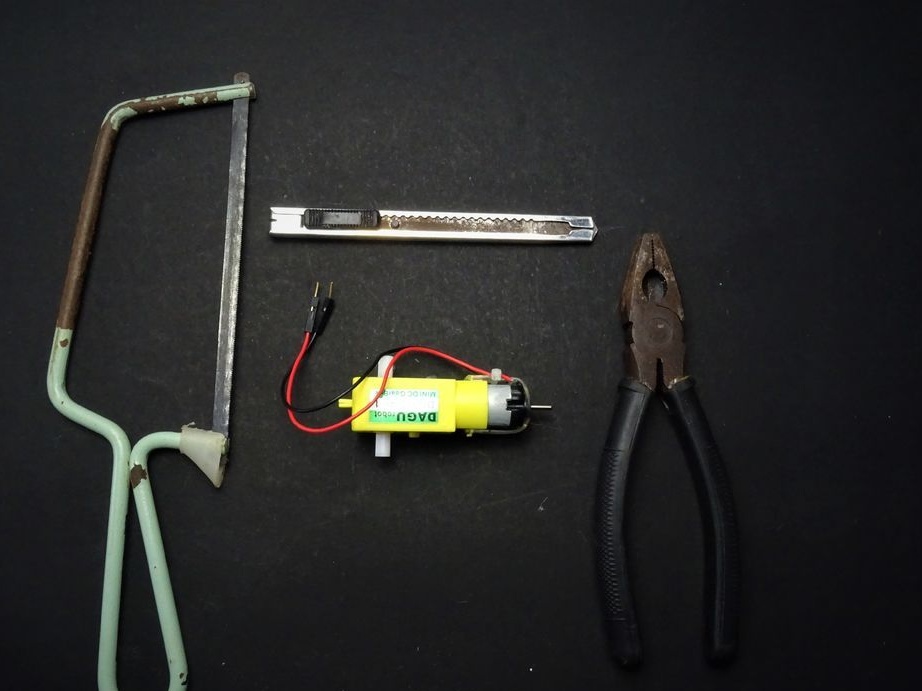
Mga tool at materyales:
-
-AKB 9V;
-Switch;
-Acryl;
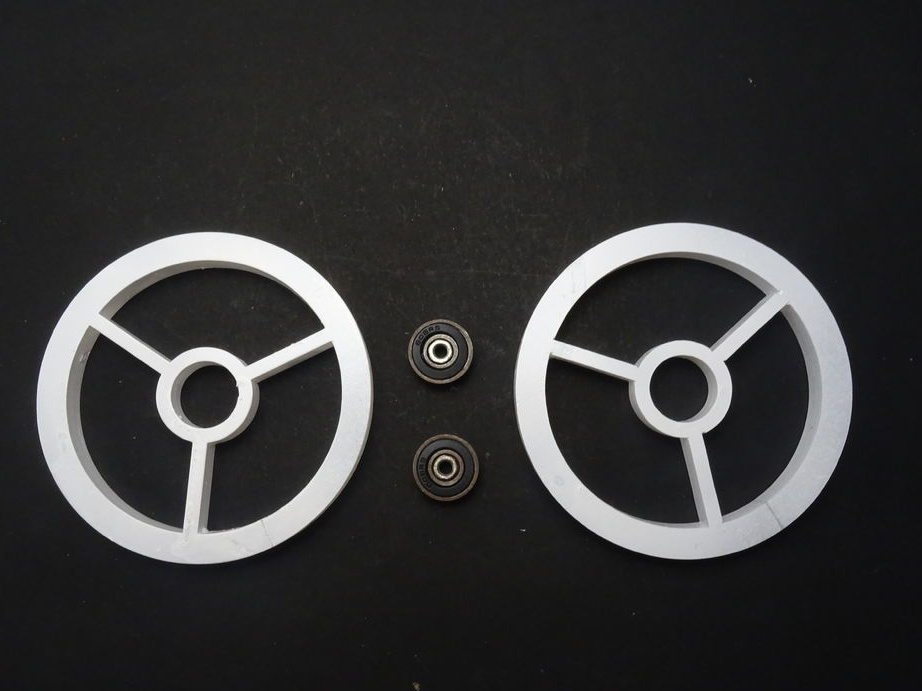
-Pamilyar;
(sa pamamagitan ng sanggunian, ang tindig ay 8 x 16 x 5 mm, ang may-akda ay nagpapahiwatig ng 8 * 22 mm)
-Dalawang tagabenta;
-Fastener;
-Floats;
-Glue gun;
-Super pandikit;
Epoxy dagta;
-Soldering iron;
-Drill;
-Laser pamutol;
-Saw;
- distornilyador;
-Drill;
-Soldering iron;
-Board;
-Computer na may software;


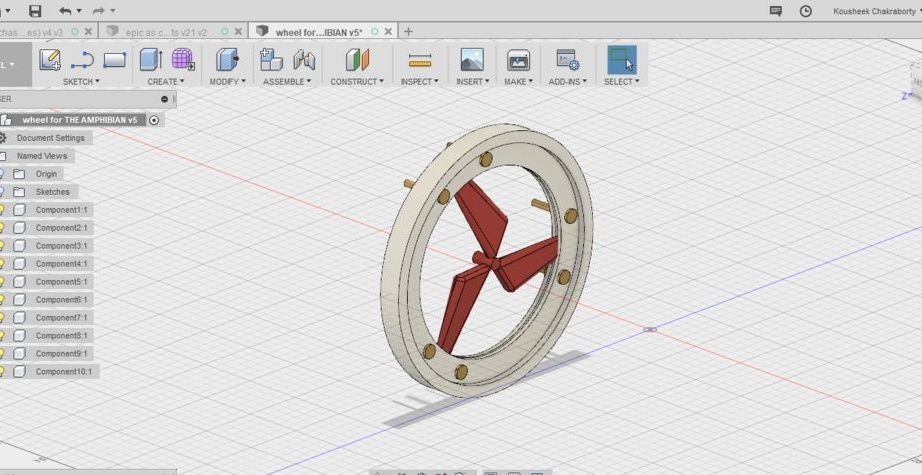
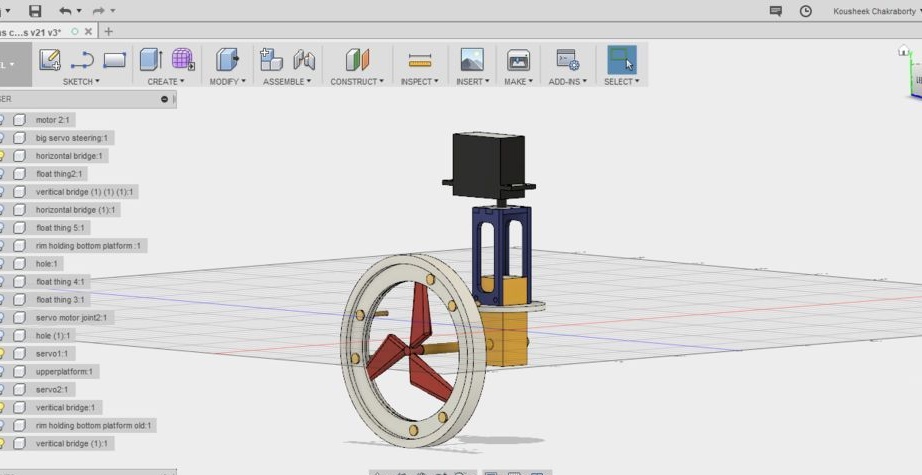
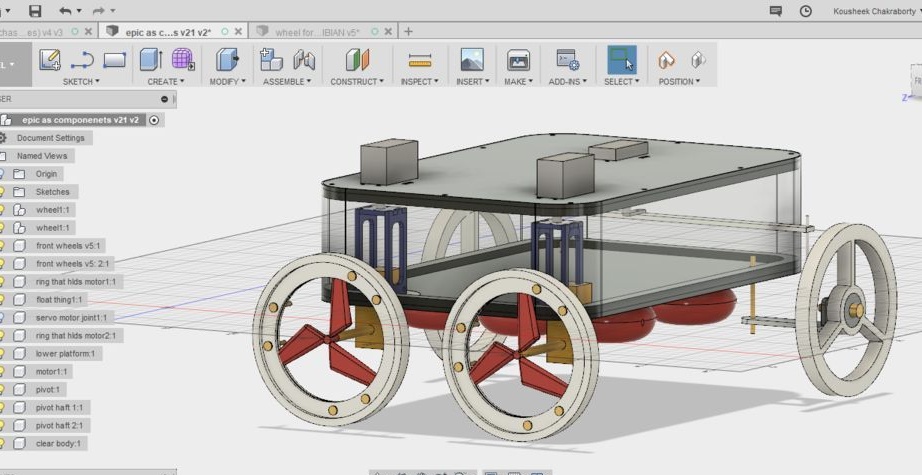
Hakbang Una: Disenyo
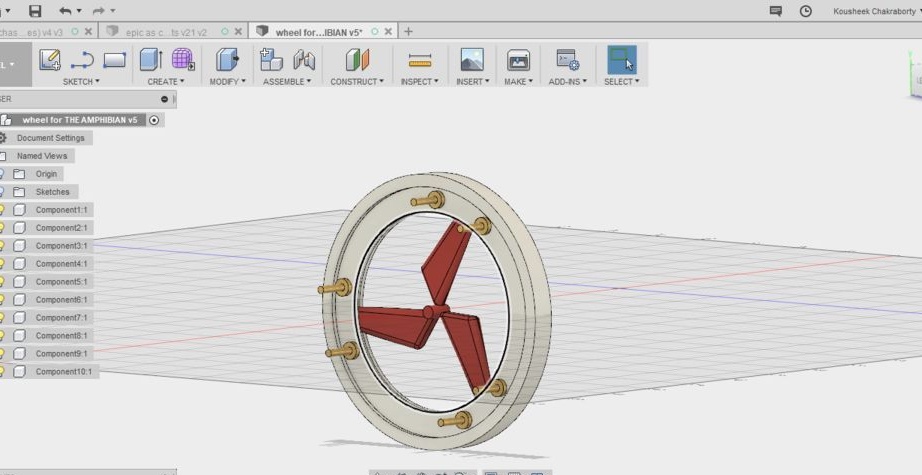
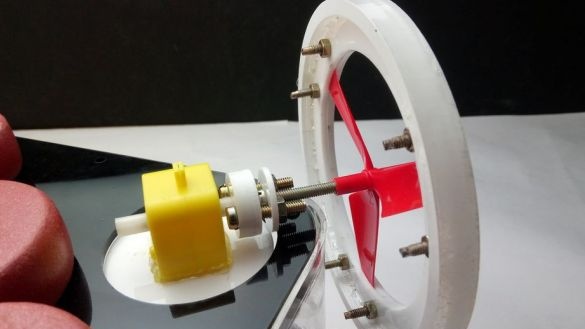
Upang lumikha ng proyekto, ginamit ng mga masters ang programang Fusion 360. Ang buong kahirapan ay pagsamahin ang paggalaw sa lupa at sa tubig. Kapag nagdidisenyo ng mga gulong, ang mga masters ay bumuo ng isang sistema kung saan magbubukas ang mga tornilyo sa tubig, ngunit sa pagtingin sa pagiging kumplikado ng disenyo, isinama lamang nila ang mga propellers mula sa laruan ng mga bata sa loob ng gulong. Pinapayagan nitong ilipat ang mga gulong sa all-terrain na sasakyan sa lupa, at kapag pinasok nila ang tubig, ang mga turnilyo ay naka-on.
Upang maipatupad ang ideyang ito, kailangan mong mag-ikot sa likuran ng gulong na patayo sa all-terrain na sasakyan kapag nagmamaneho sa tubig. Ito ay naging posible kapag ang mga gears ng makina ay kinuha sa labas ng frame. Ang mga plastik na gearbox at pagpasok ng tubig sa kanila ay hindi makakasama.
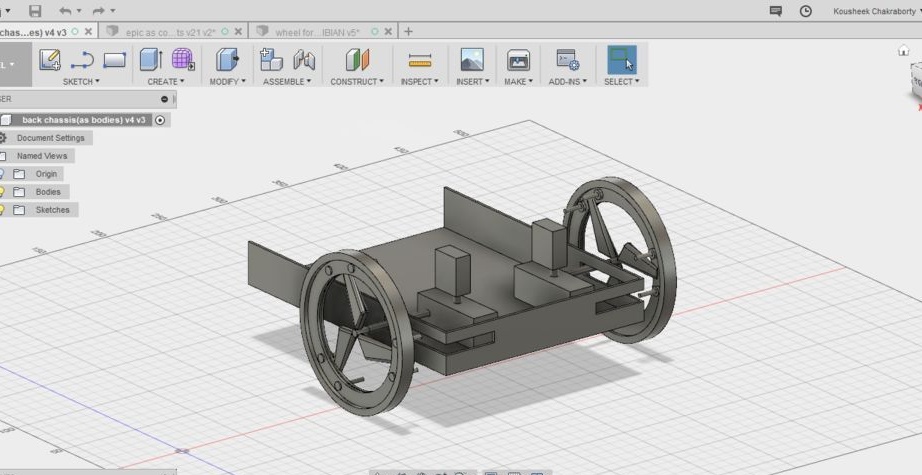
Ang pag-ikot ng mga wheel-screws ay isinasagawa gamit ang isang servo drive.
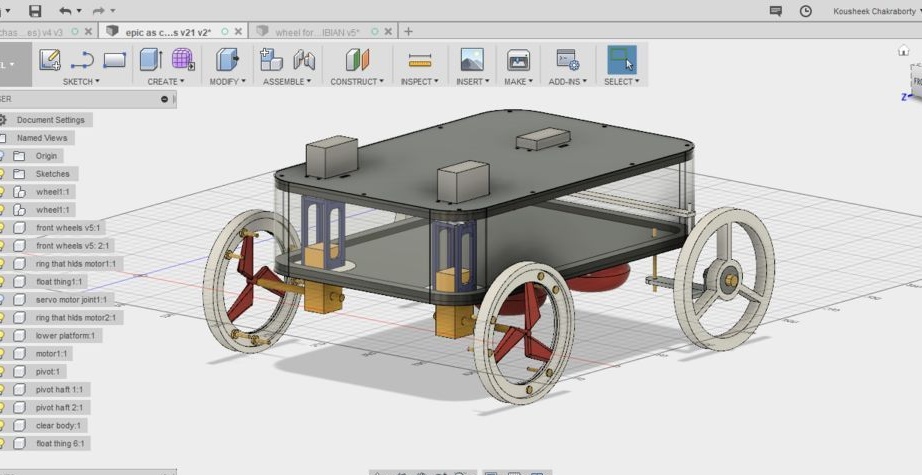
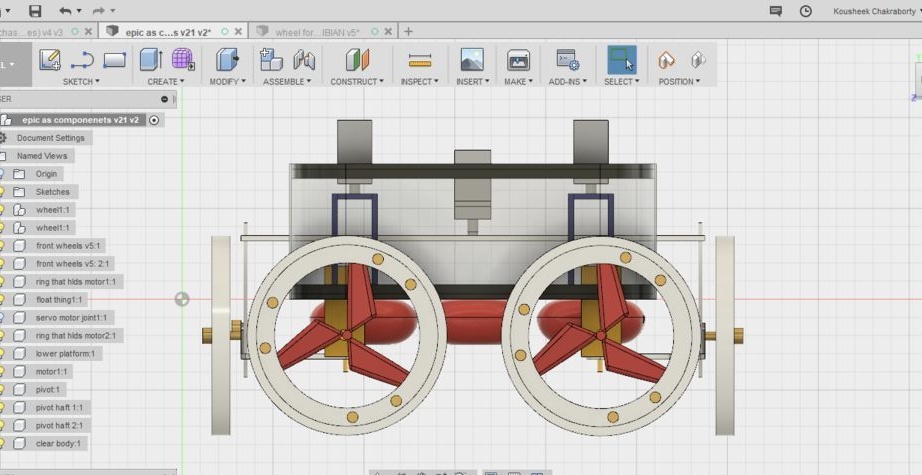
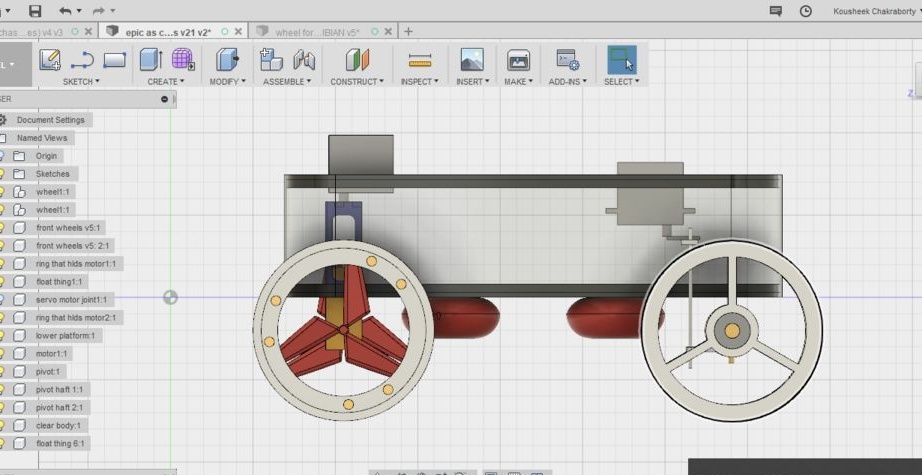
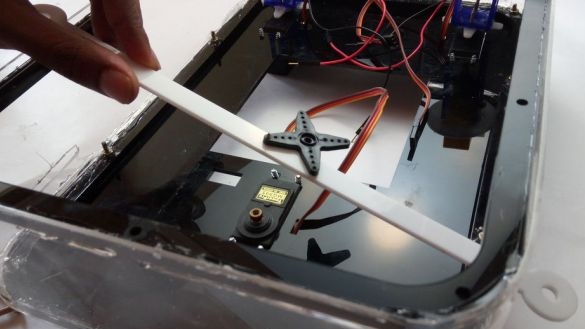
Ang sasakyan ng all-terrain ay may dalawang mekanismo ng pag-on. Ang isa upang makontrol ang mga gulong sa likuran ng mga propellers sa tubig, at ang pangalawa, upang magmaneho sa lupa, ay kinokontrol ang mga gulong sa harap. Ang anggulo ng pag-ikot ng mga gulong sa harap ay 35 degree, na nagbibigay-daan sa iyo upang makagawa ng matalim na mga liko.
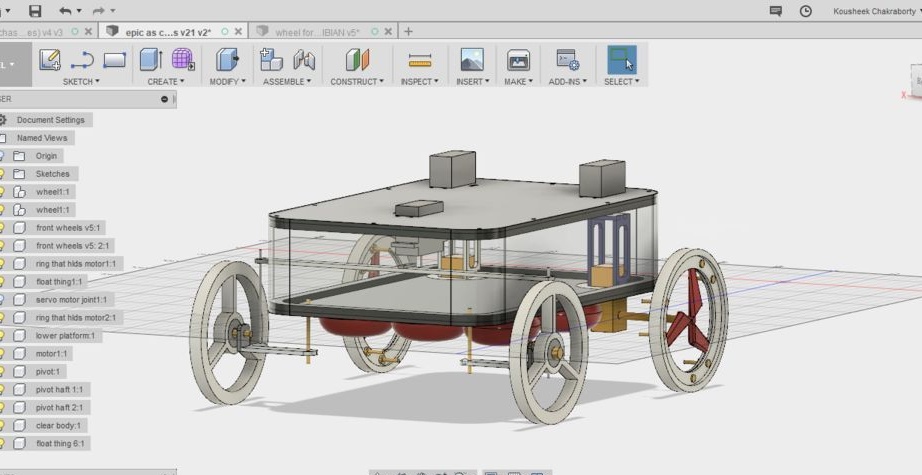
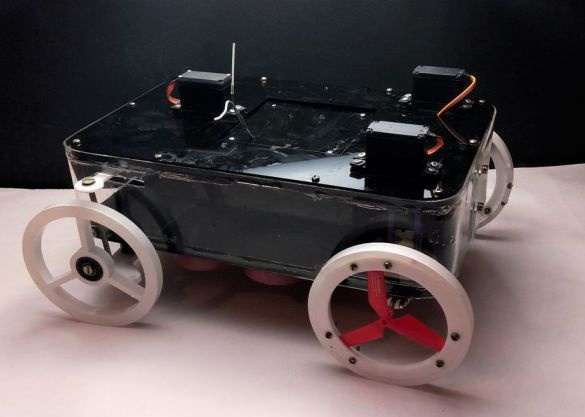
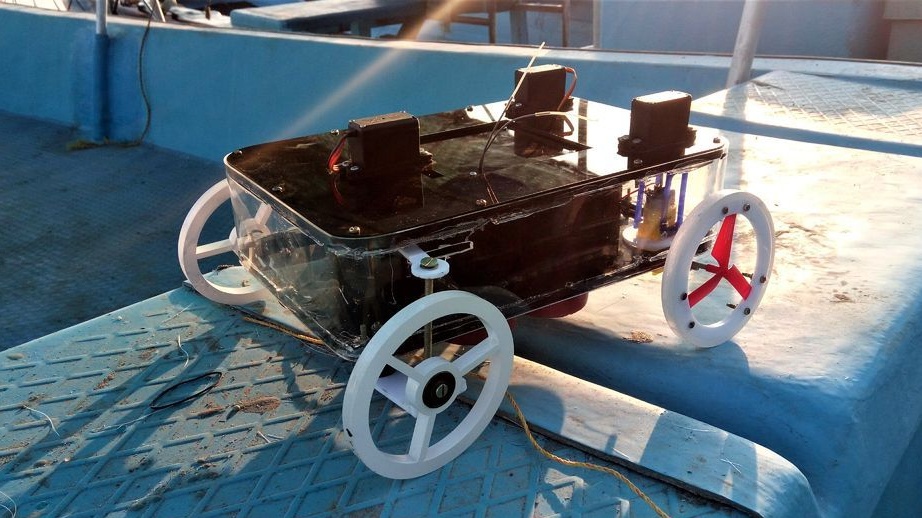
Sa mga larawan sa ibaba makikita mo ang pagbabagong-anyo ng all-terrain na sasakyan kapag lumilipat sa lupa at tubig.
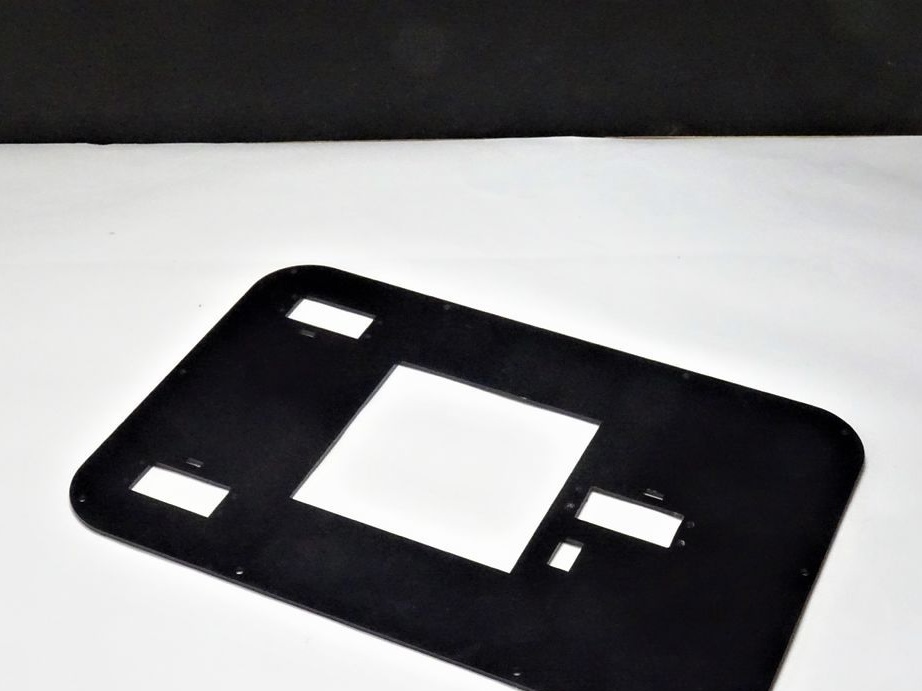
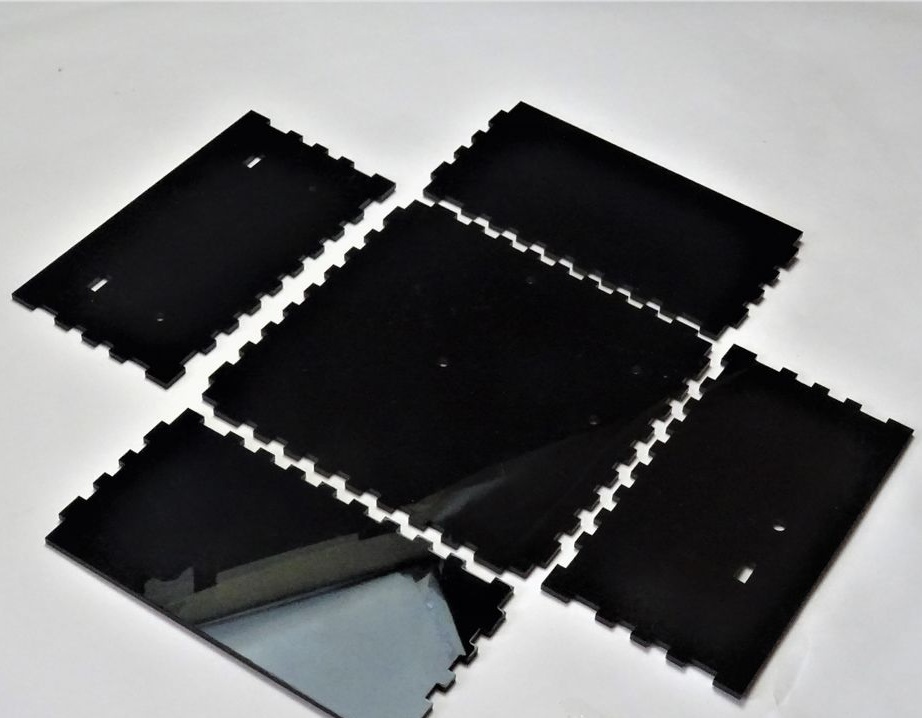
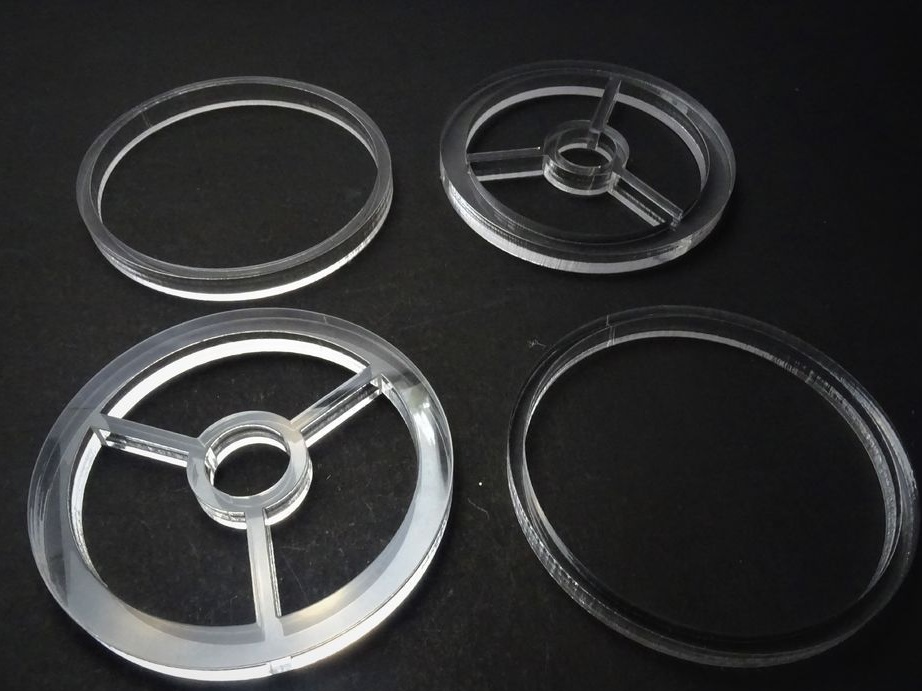
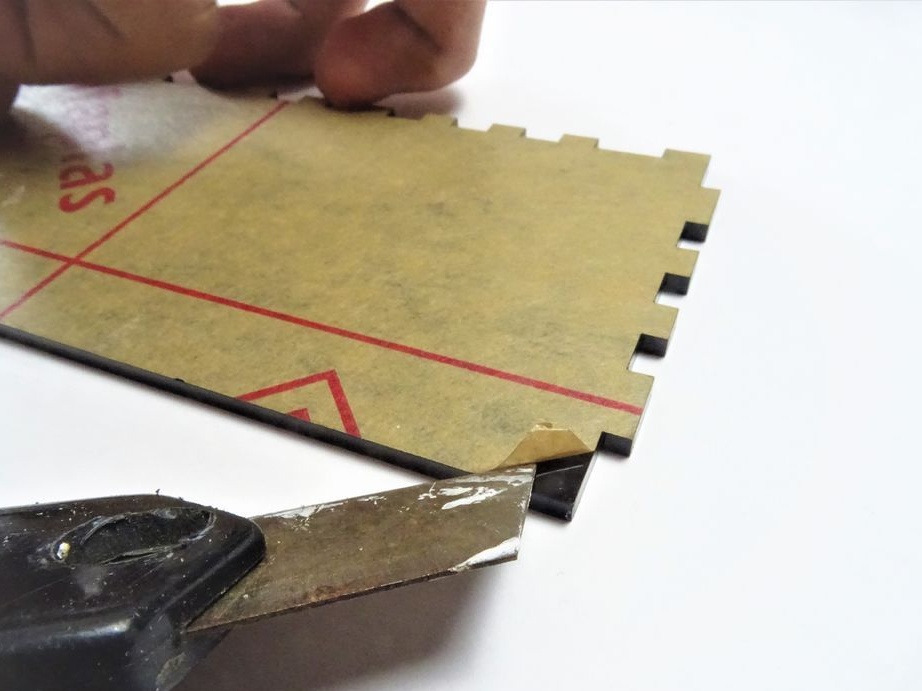
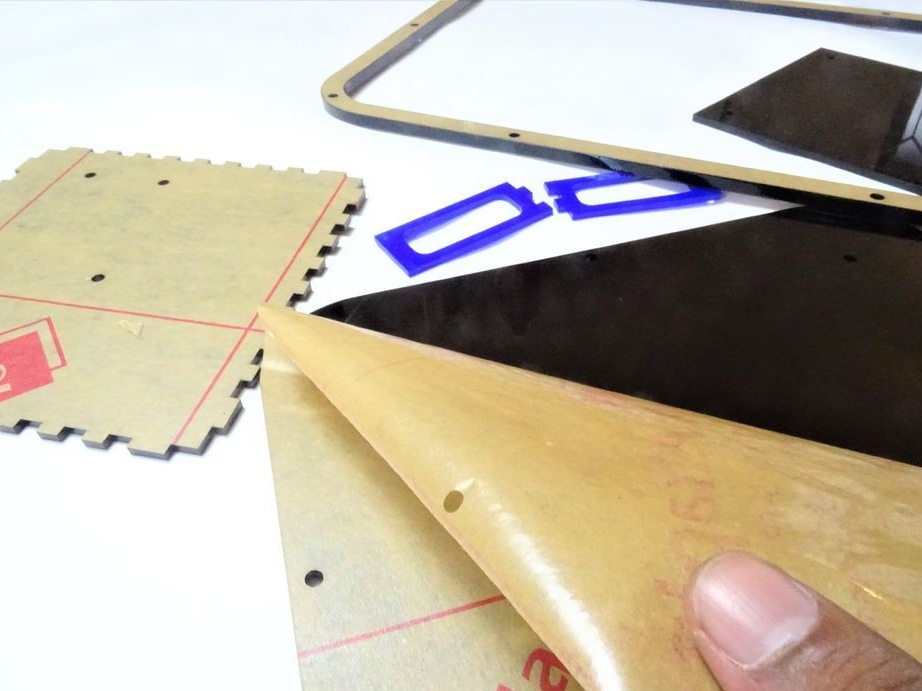
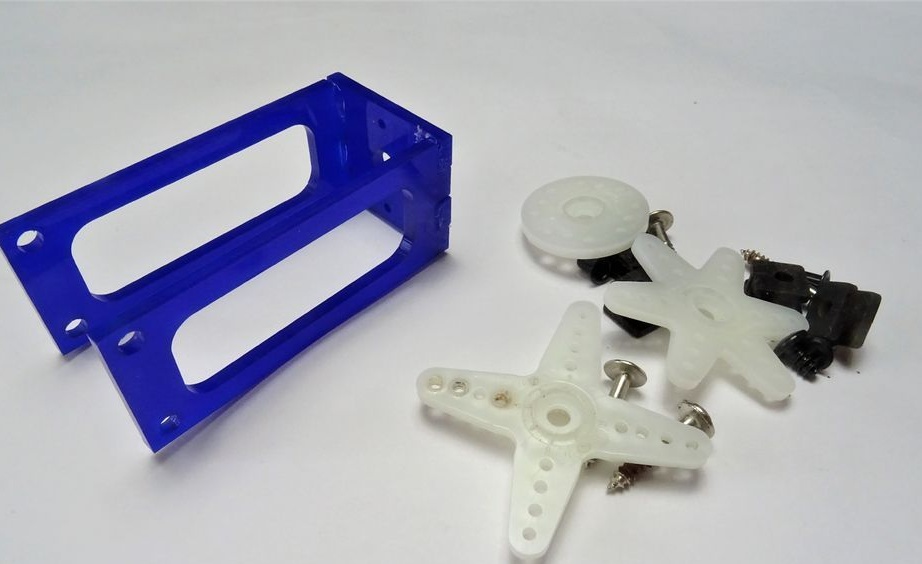
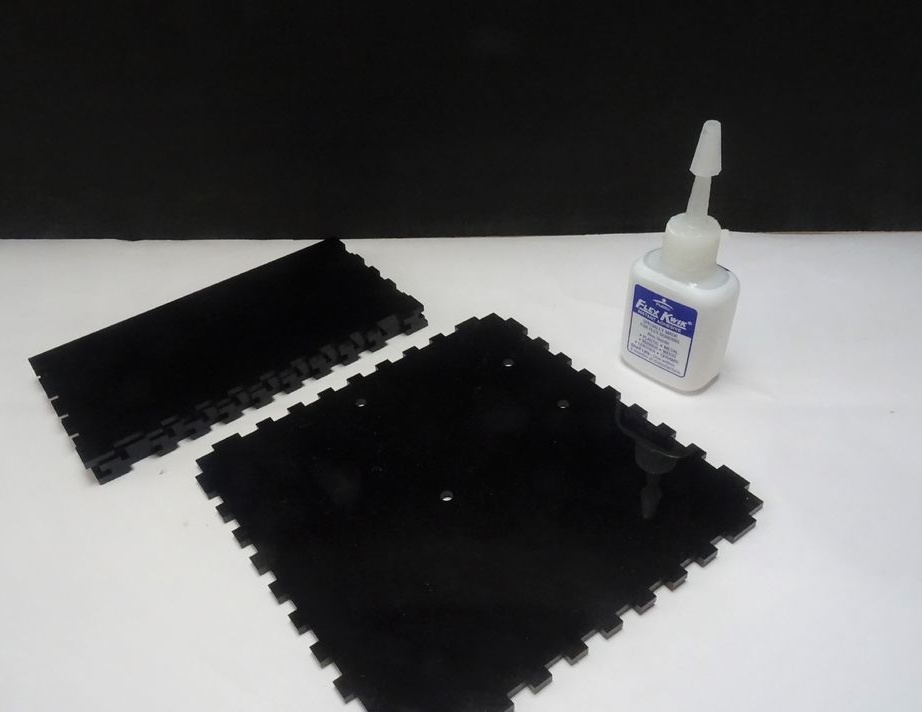
Hakbang Dalawang: Laser Cutting
Para sa all-terrain na sasakyan, ginamit ng master ang acrylic ng iba't ibang kapal at kulay.
Itim na top coat 3 mm x 1
Bottom Layer Black 3 mm x 1
Itim na gilid na frame 5 mm x 2
Side wall transparent 2 mm x 1
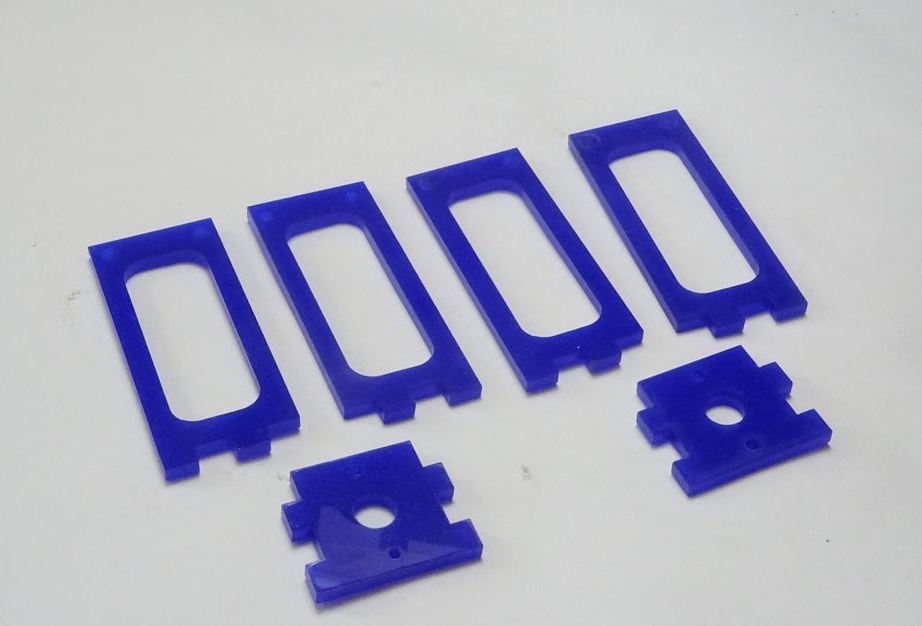
Asul na pang-asul na 3 mm x 4
Bridge Top Piece Blue 3 mm x 2
Engine DisK White 3 mm x 2
Puting gulong puting 10 mm x 2
Inner Rim (Rear Wheel) Puti 3 mm x 4
Outer rim (likuran ng gulong) Puti 10 mm x 2
Ang pagpipiloto White 3 mm x 1
Gabinete ng drawer Black 3 mm x 1
Sakop ng itim na kompartimento 3 mm x 1
Rear motor shaft White 3 mm x 2
Puting panel puti 5 mm x 2



Maaari mong i-download ang file para sa CNC mula sa link.
Laser Cutting Rover Parts.zip
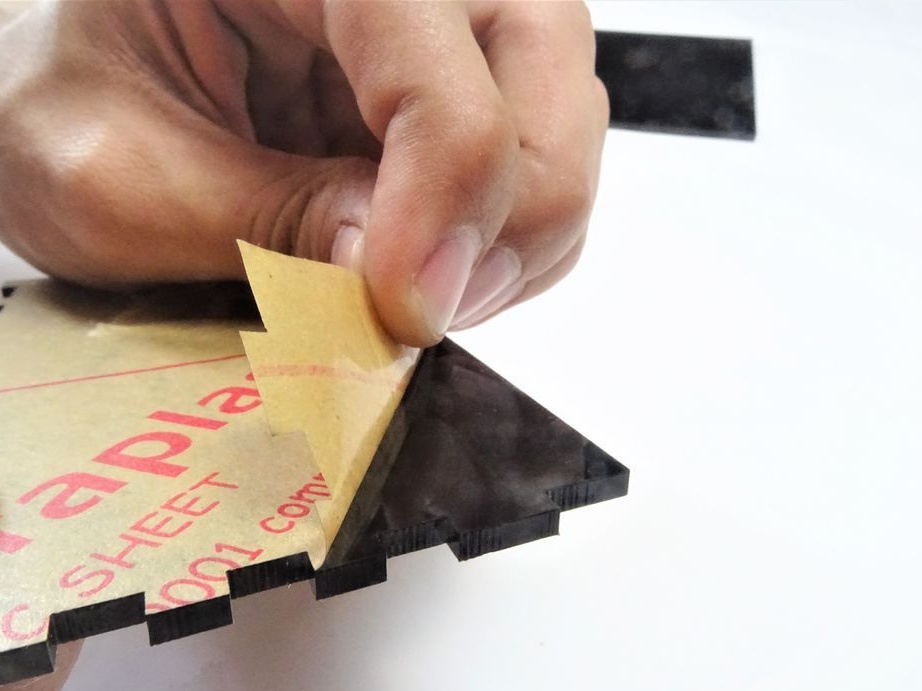
Matapos ang pagmamanupaktura ng mga bahagi, tinanggal ang proteksiyon na layer sa kanila.
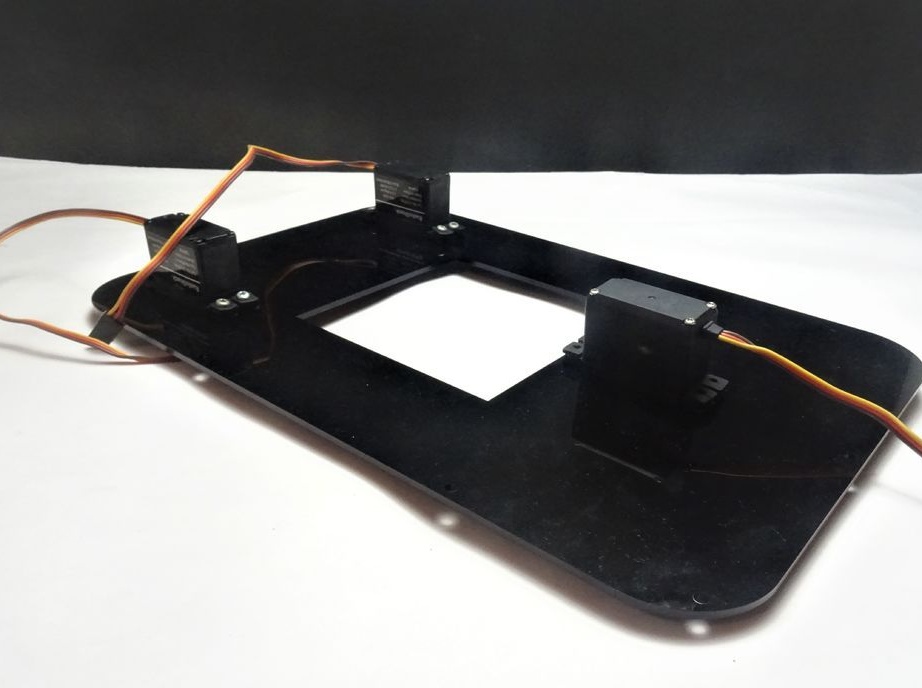
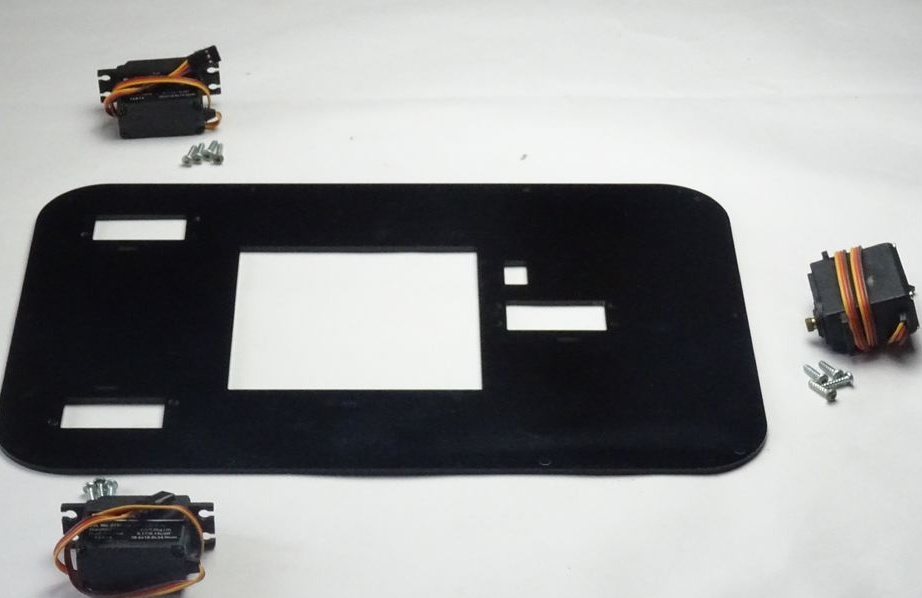
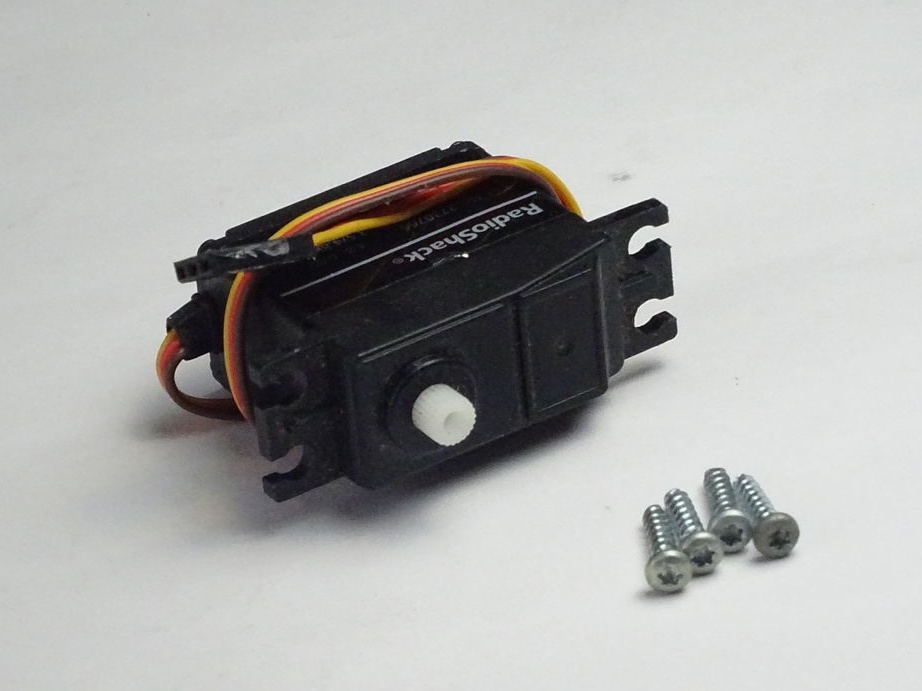
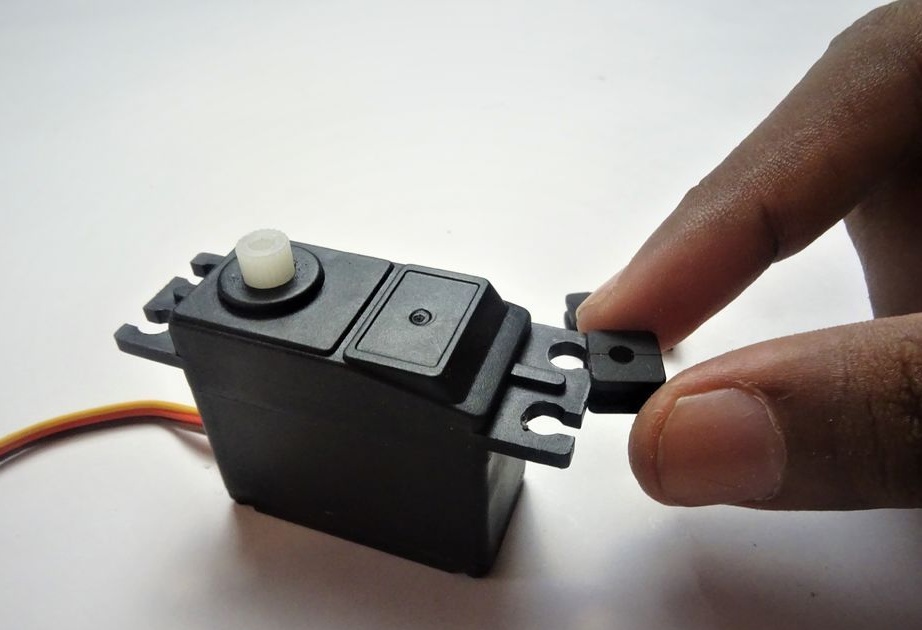
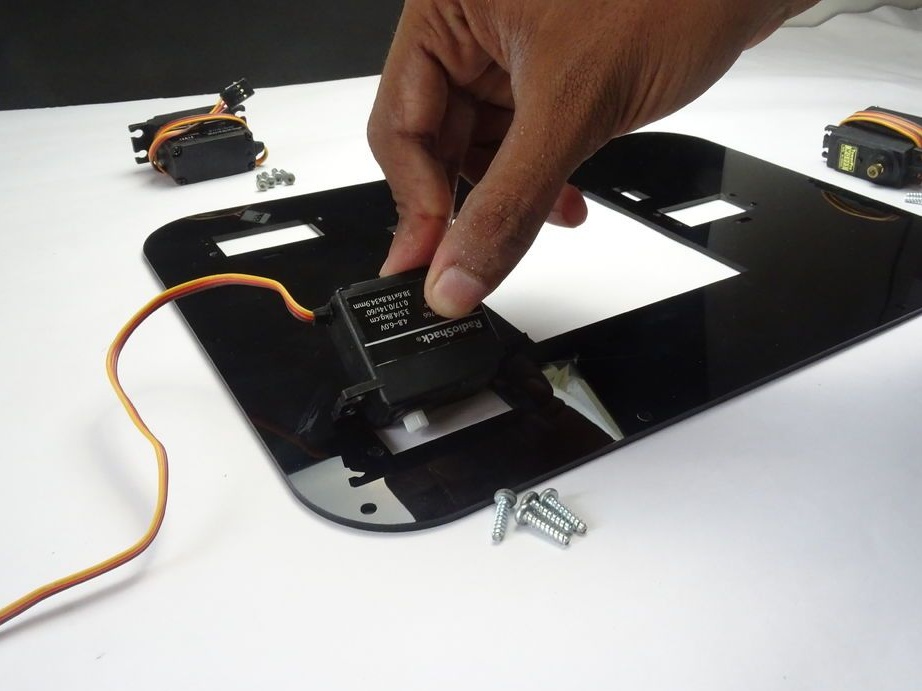
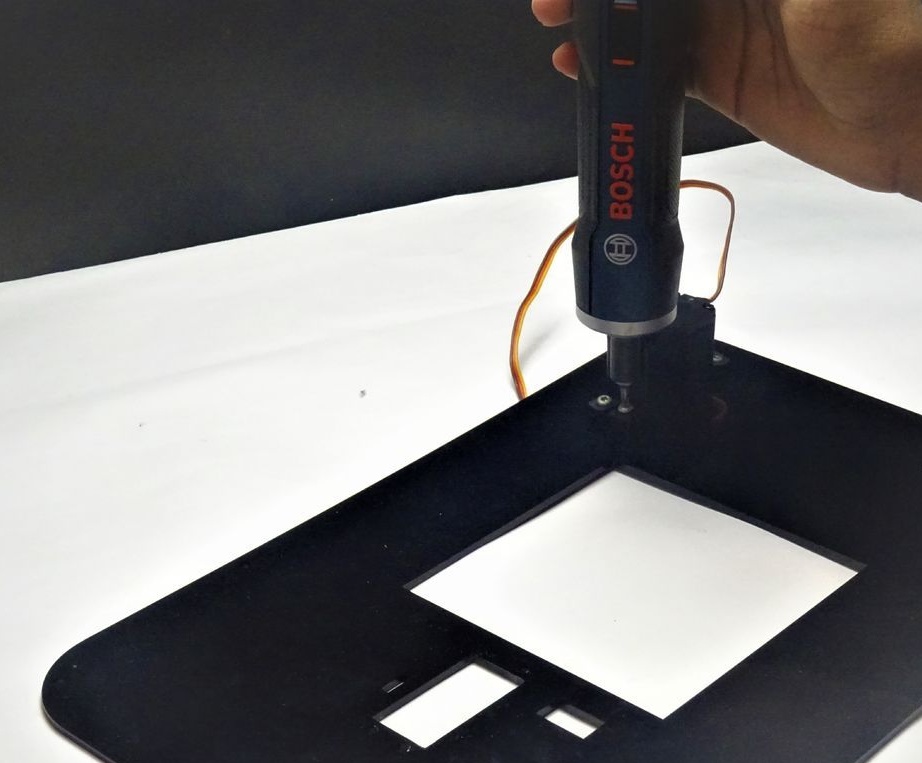
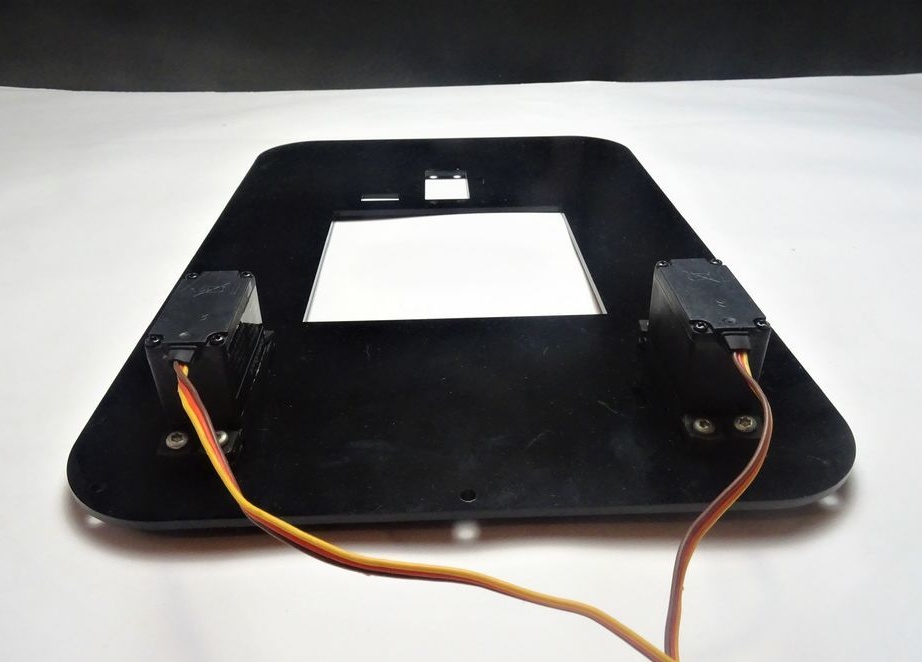
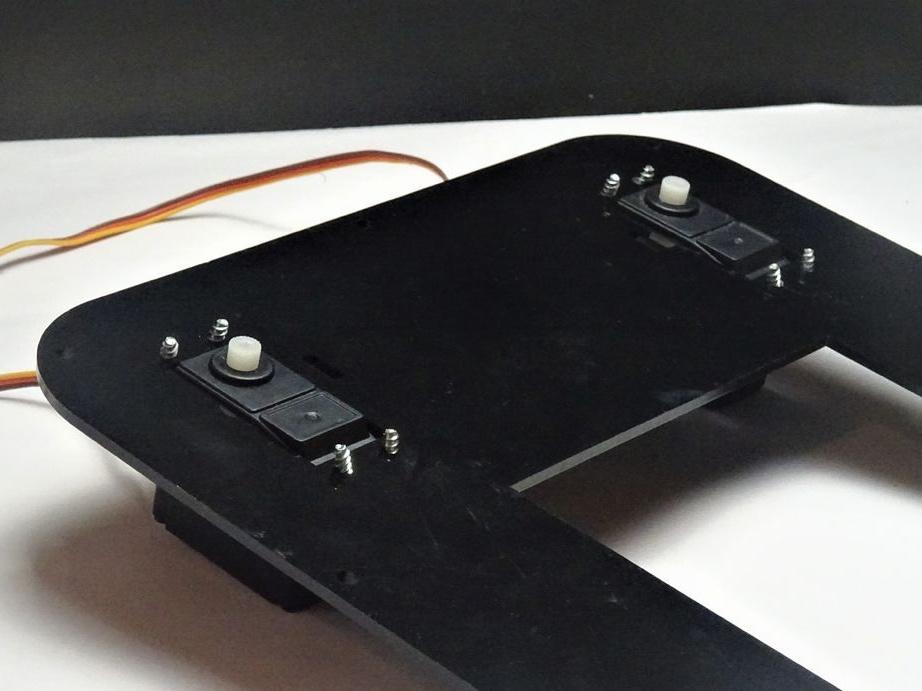
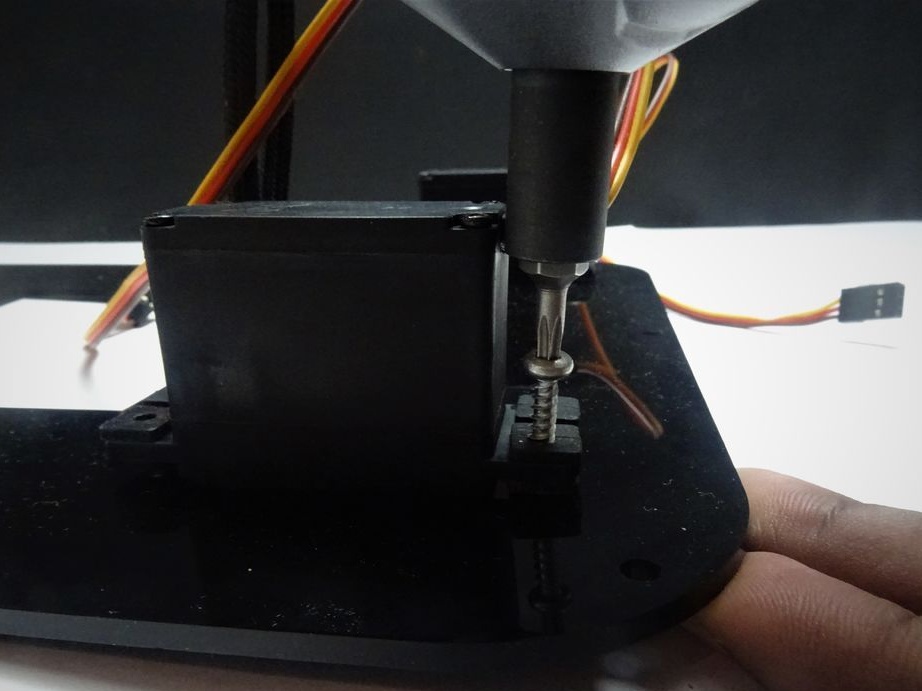
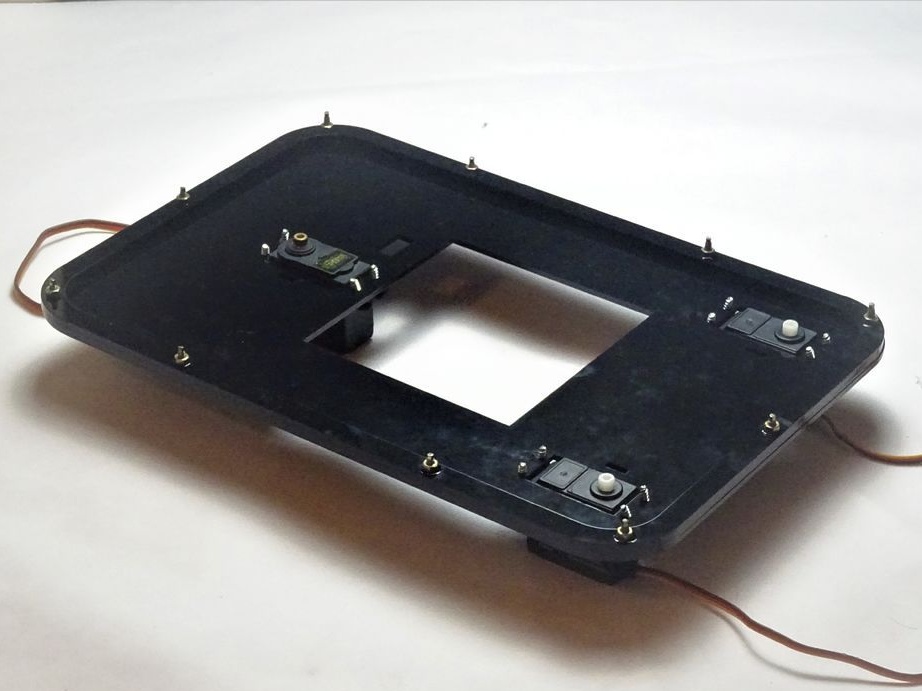
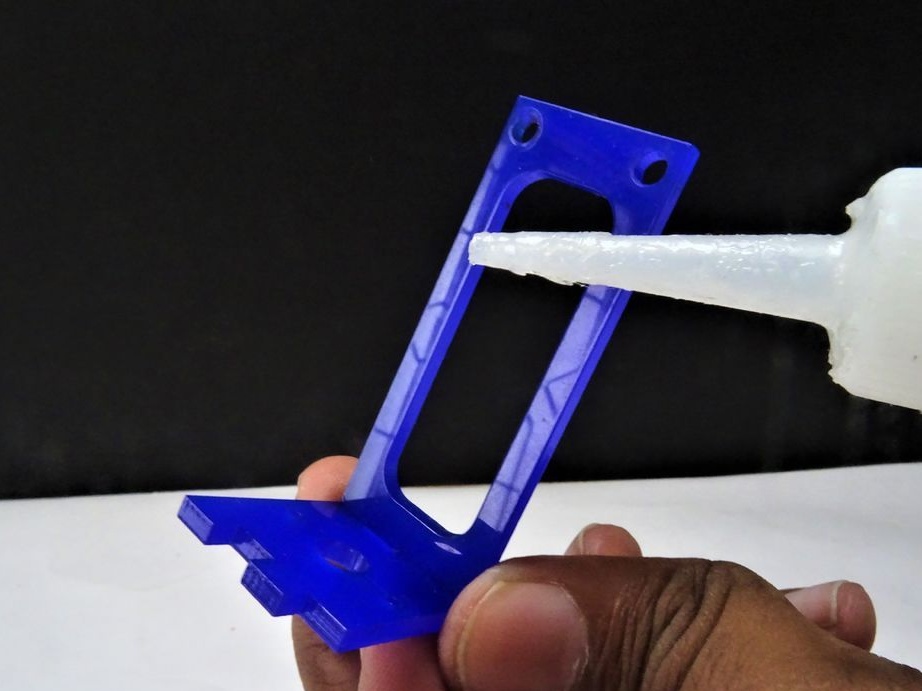
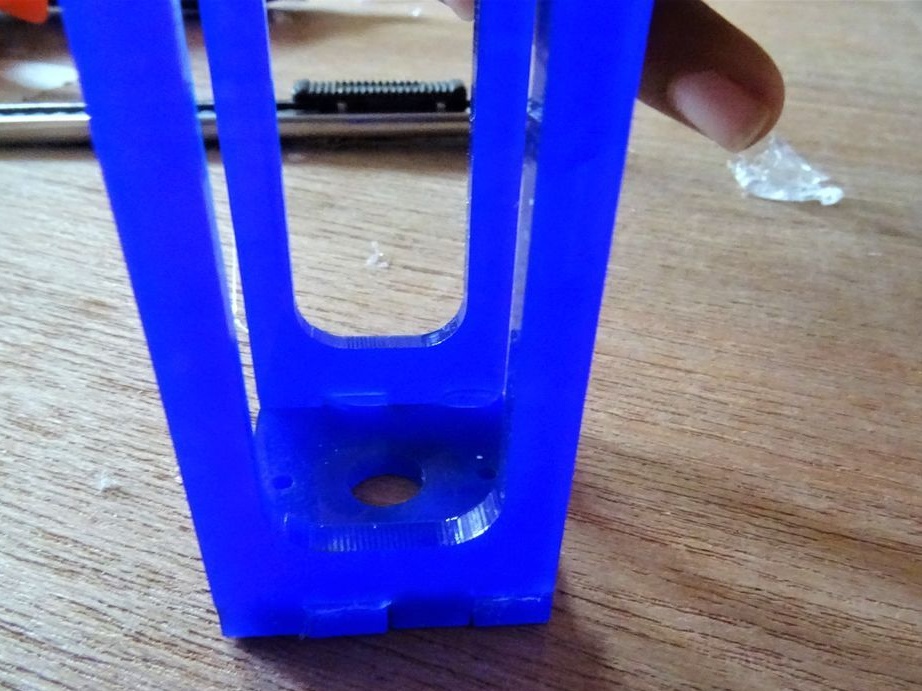
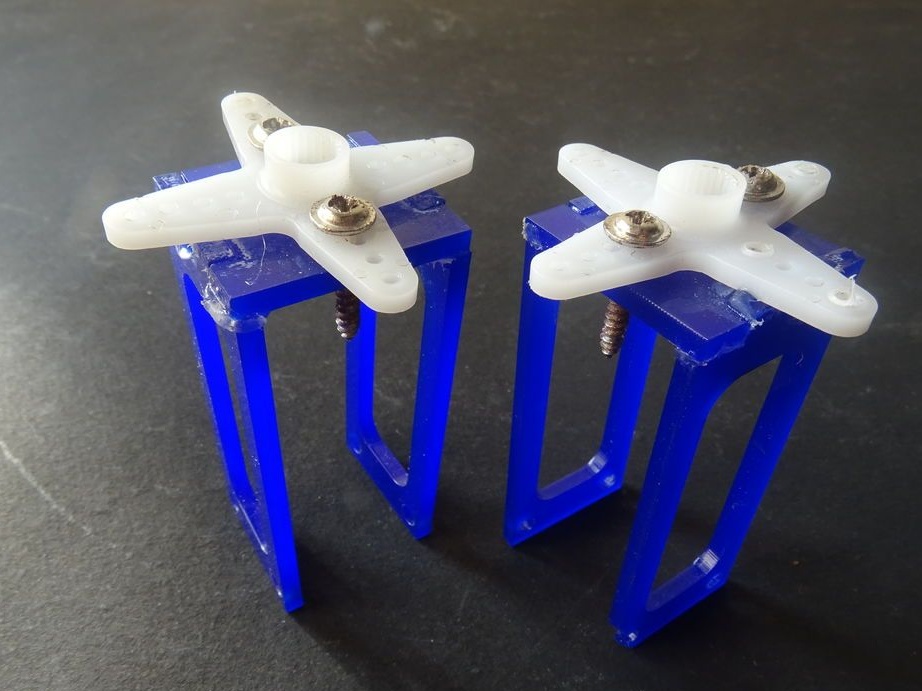
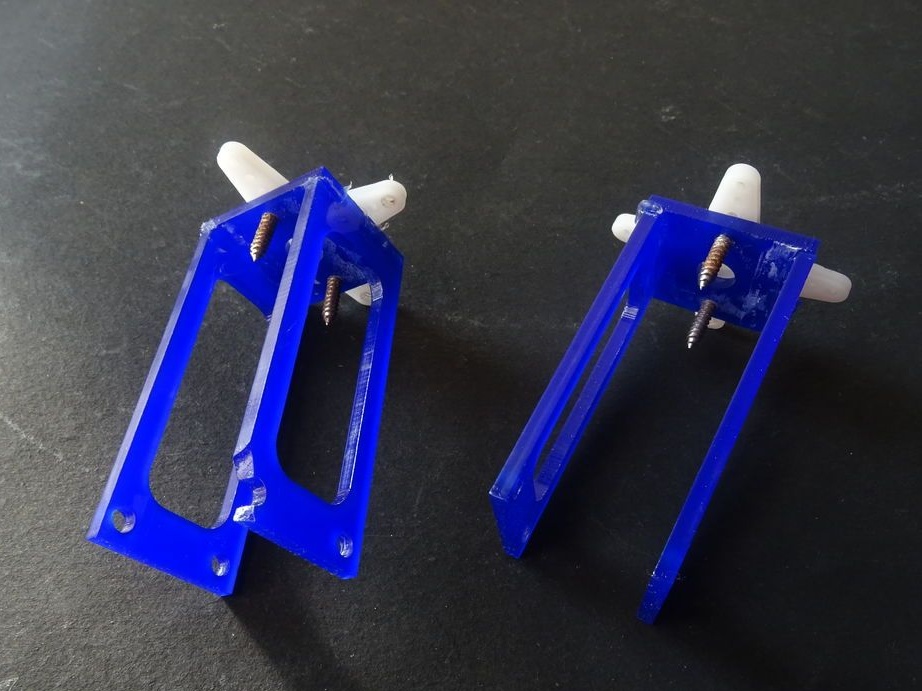
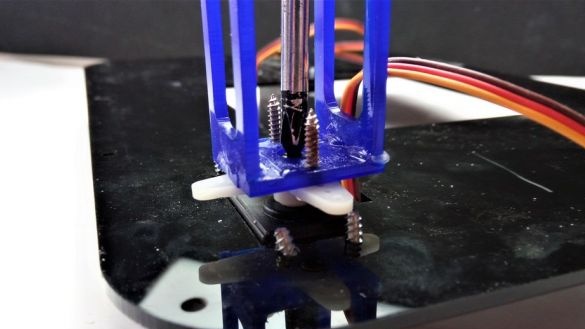
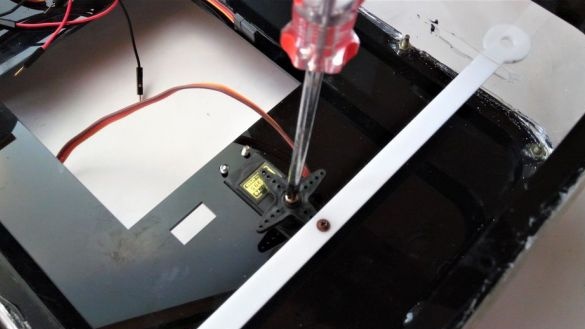
Hakbang Tatlong: I-install ang Servo Motors
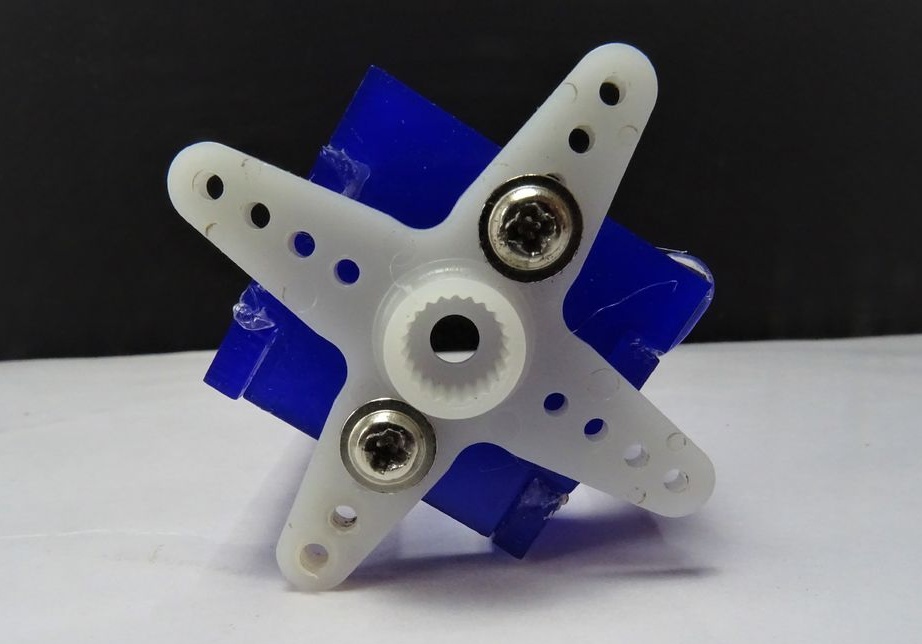
Ang lahat ng tatlong servomotor ay screwed sa platform. Dalawa sa likod at ang isa sa harap.

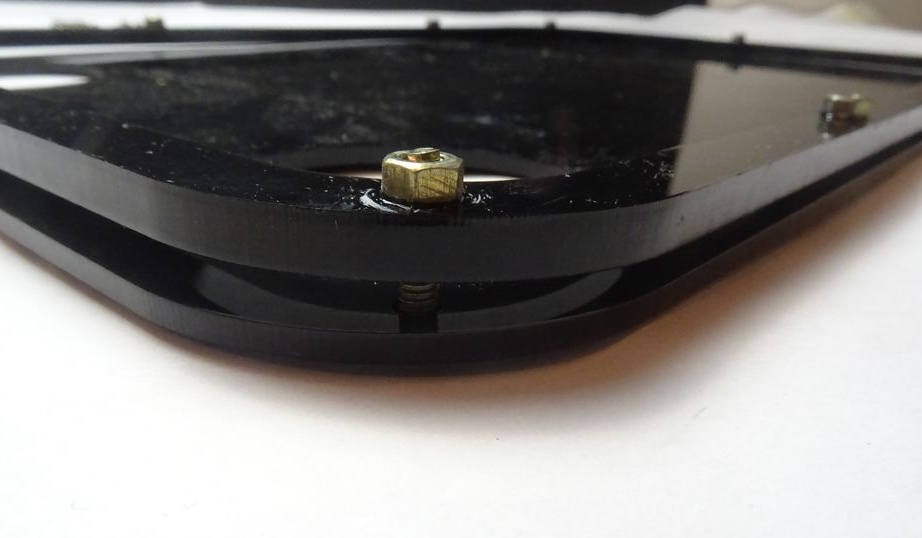
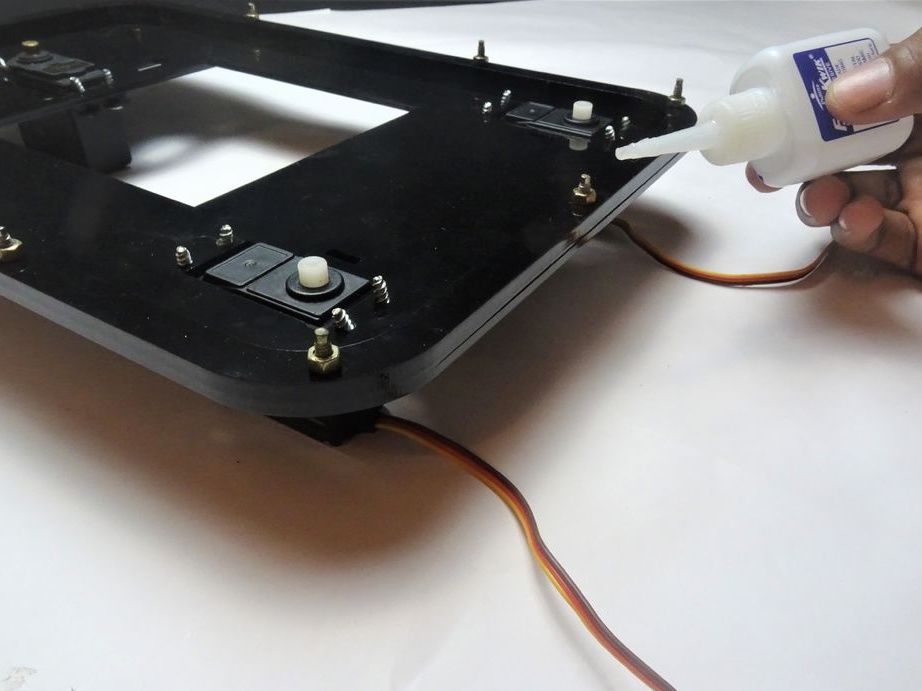
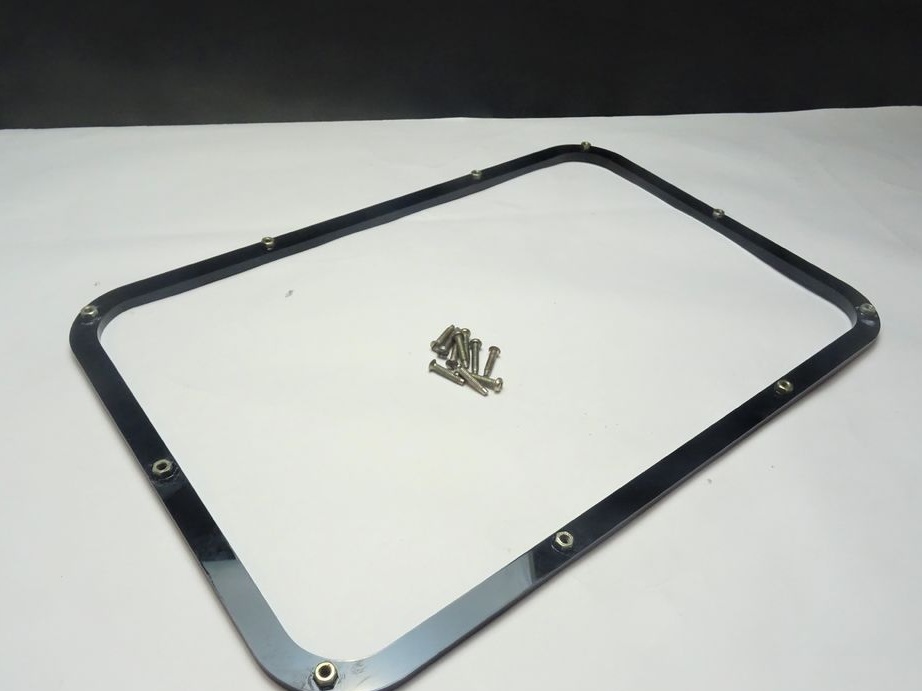
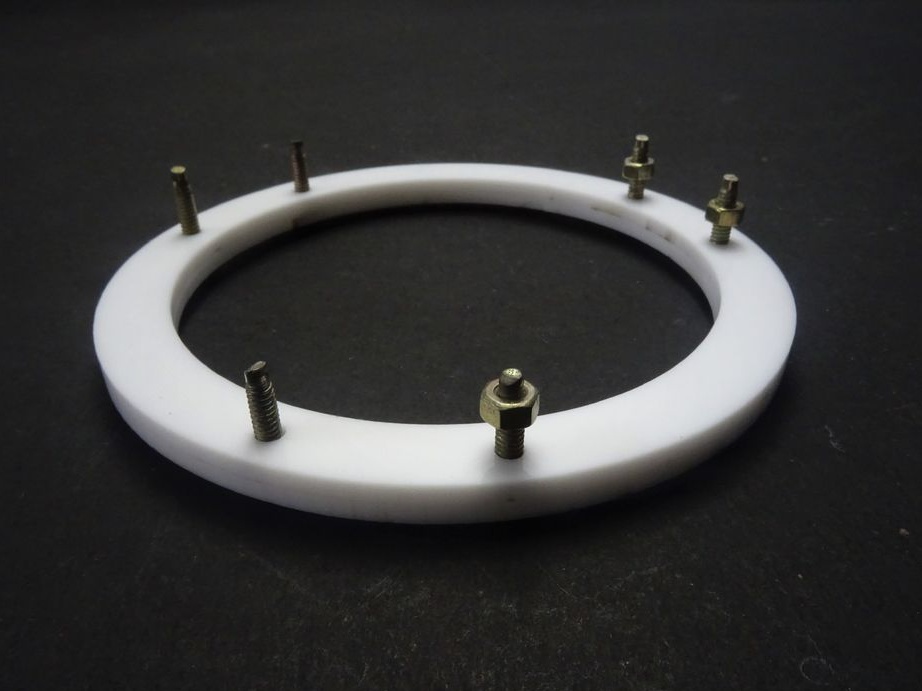
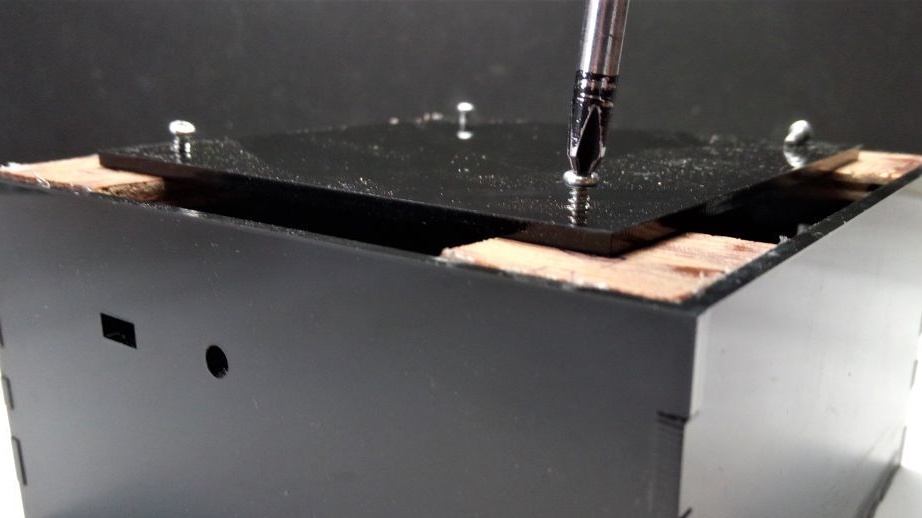
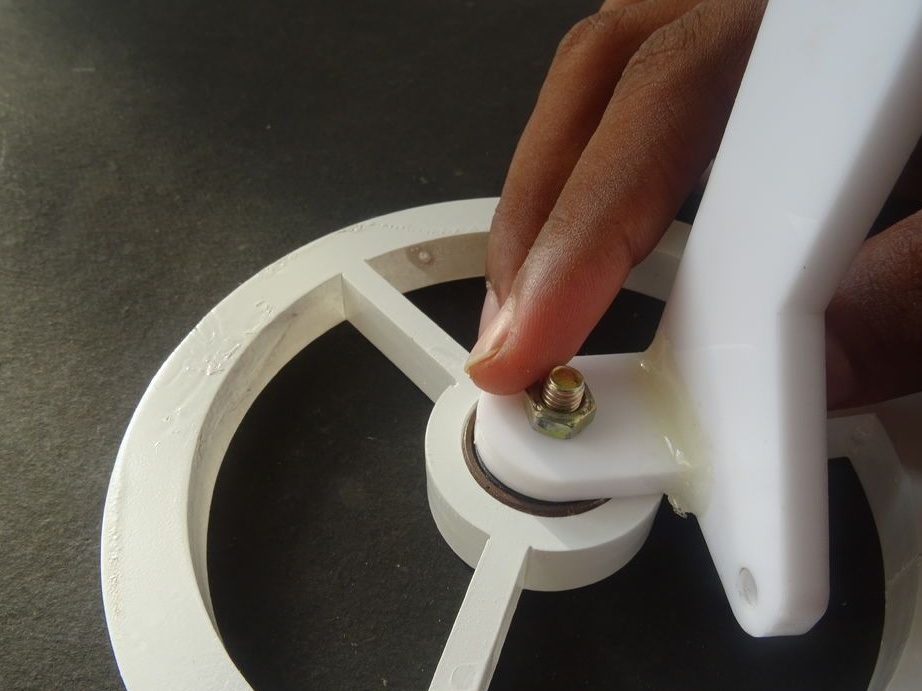
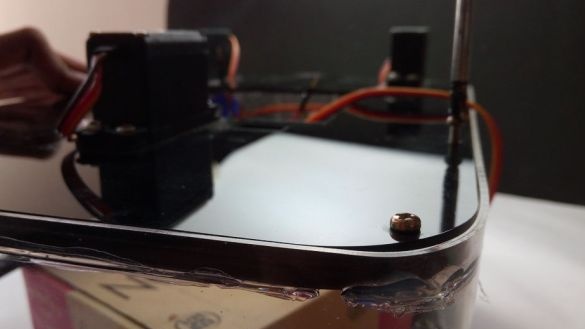
Hakbang Apat: Mga Nuts
Para sa pag-access sa mga mekanismo, ang itaas at mas mababang mga bahagi ay bolted nang magkasama. Glues ang mga mani sa superglue sa frame, at pagkatapos ay pinalakas ito ng epoxy.


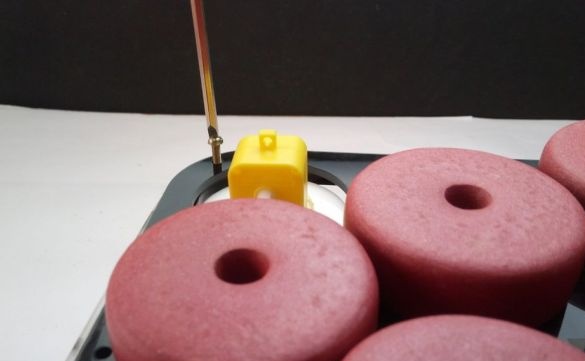
Hakbang Limang: Lumulutang
Nakalutang ang mga pandikit.



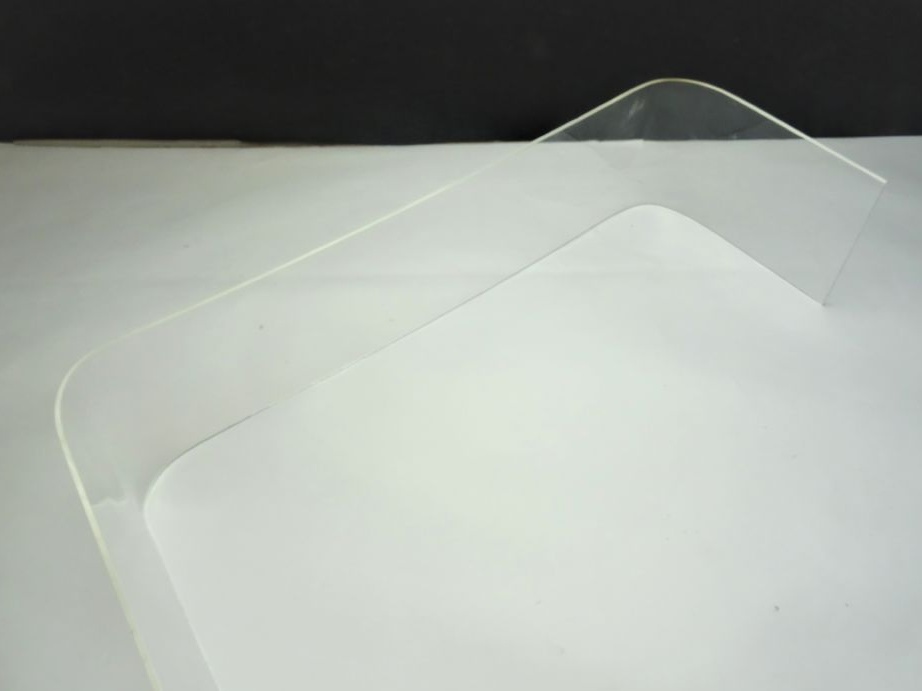
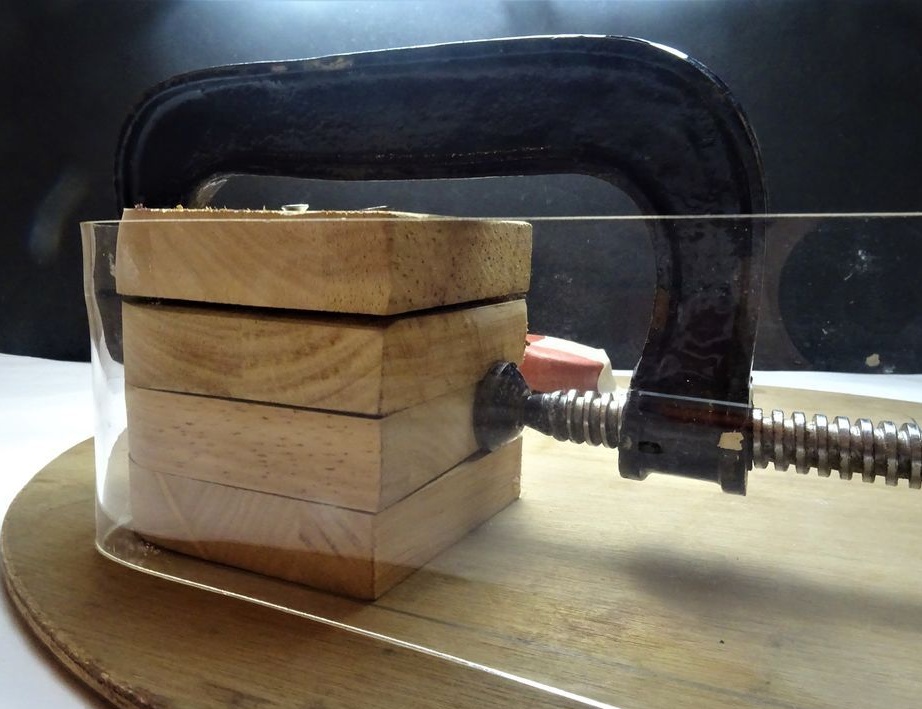
Hakbang Ika-6: Paghuhugas ng Acrylic
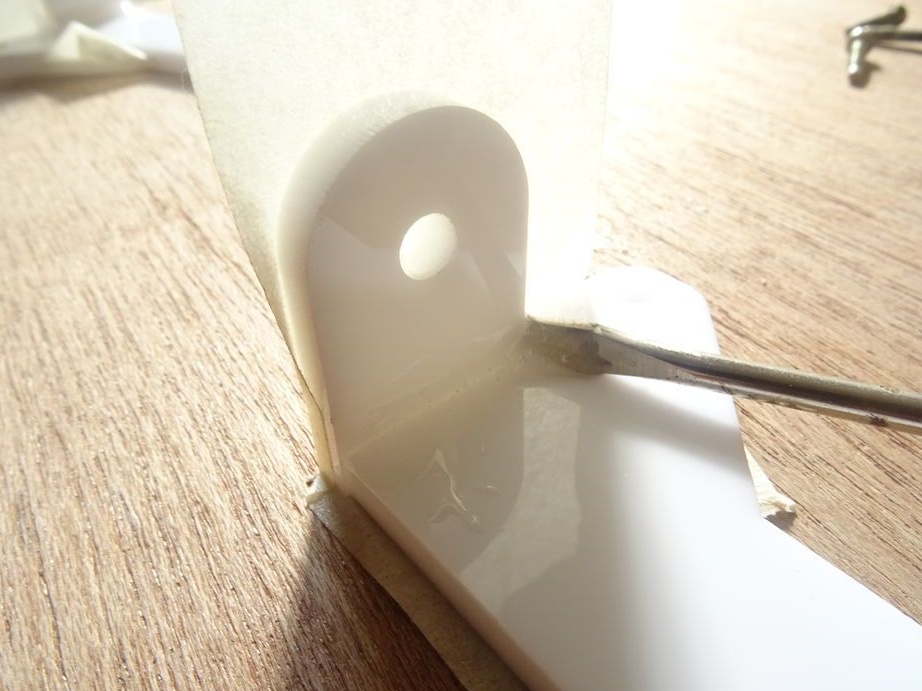
Upang yumuko ang acrylic, ang isang manggagawa ay gumawa ng isang template mula sa kahoy.



Ni-clamp niya ang bahagi na may isang salansan at, pinainit ito ng isang hairdryer, binibigyan ang bahagi ng nais na hugis.





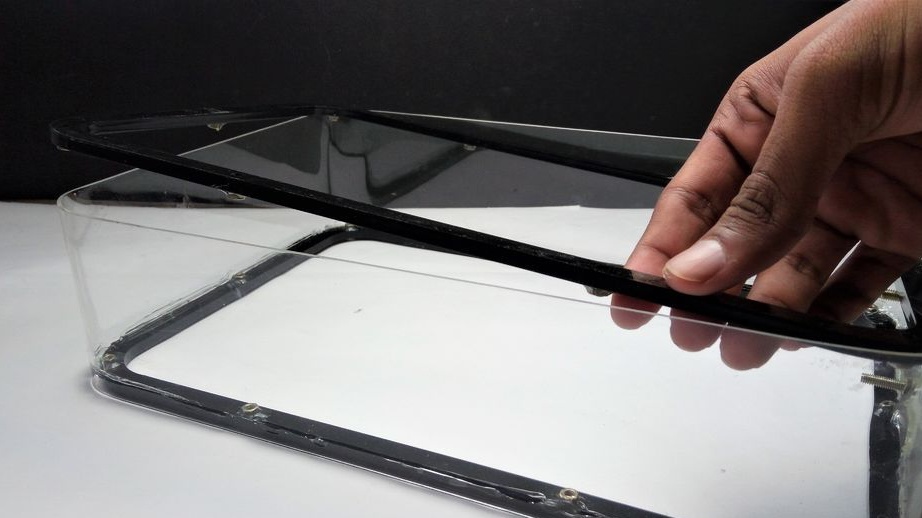
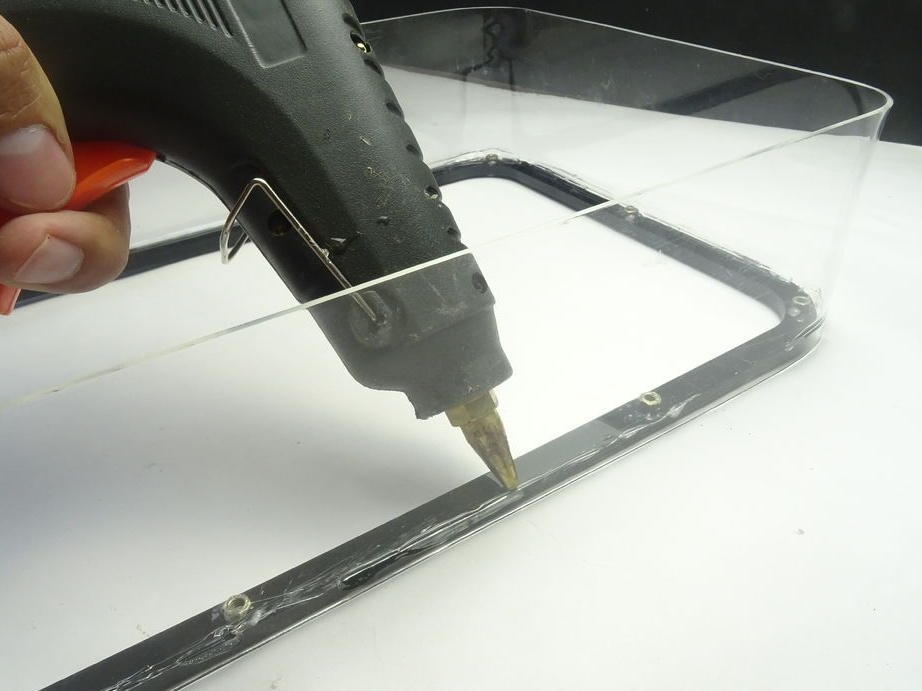
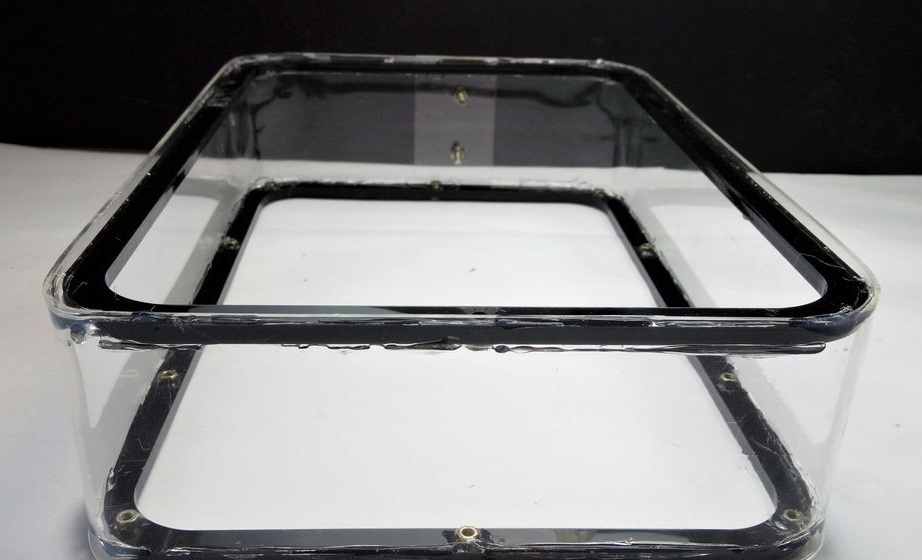
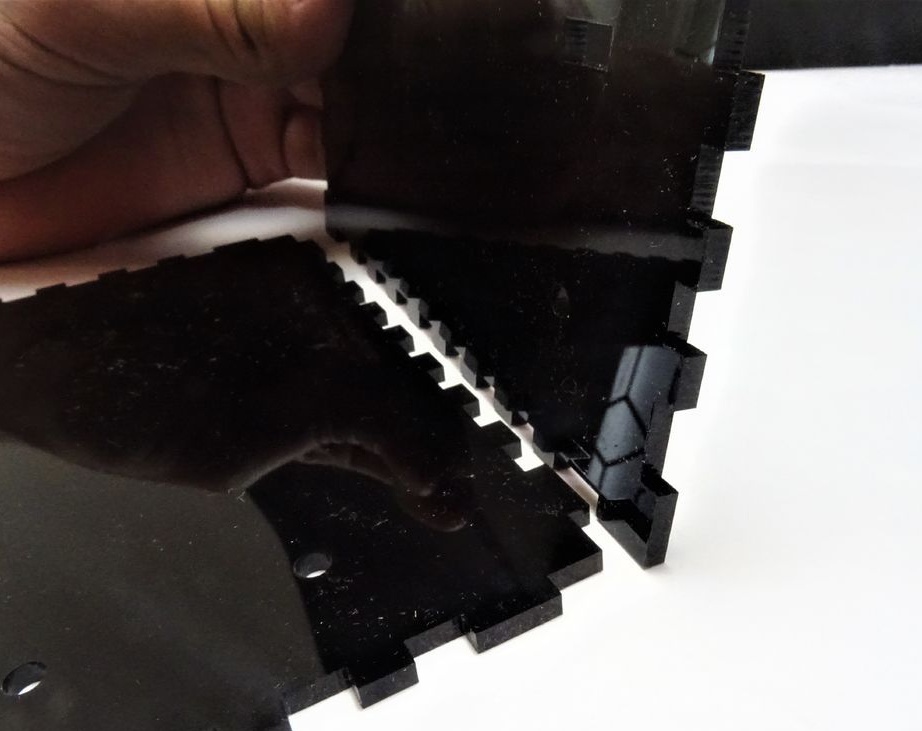
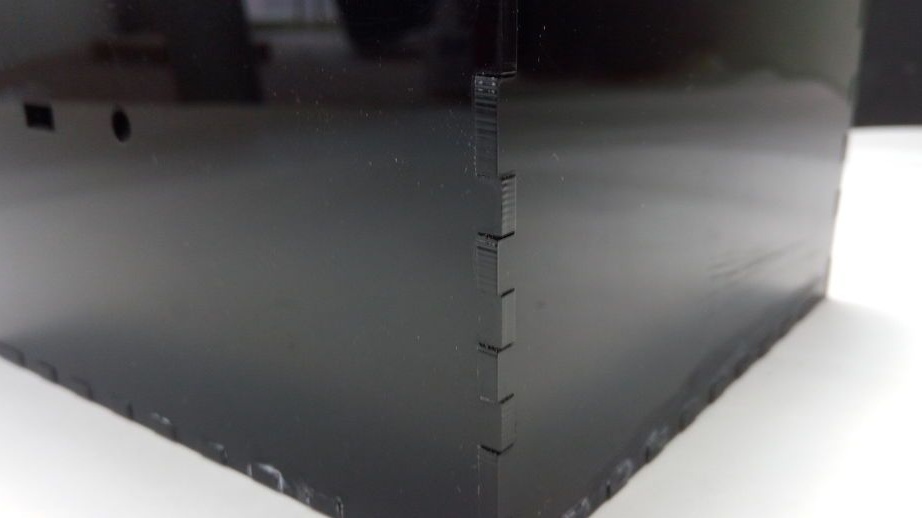
Ikapitong hakbang: balangkas
Glues ang itaas at mas mababang mga frame sa transparent na katawan. Ang mga seams ay maingat na tinatakan ng mainit na pandikit.







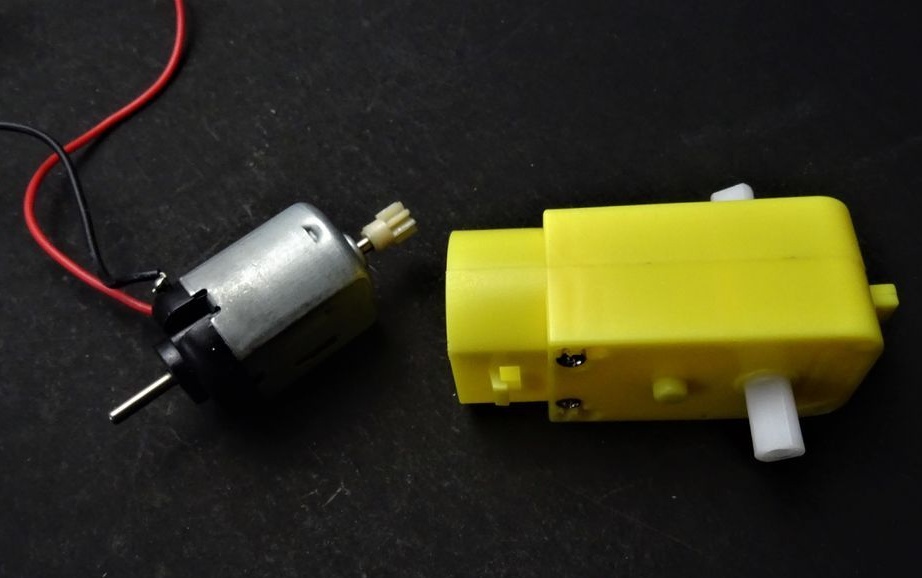
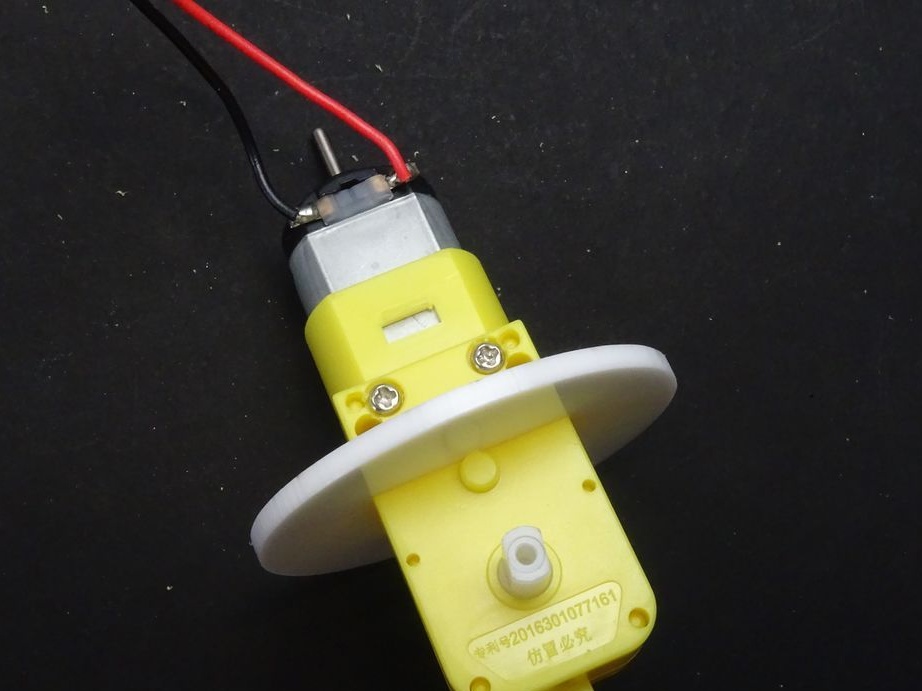
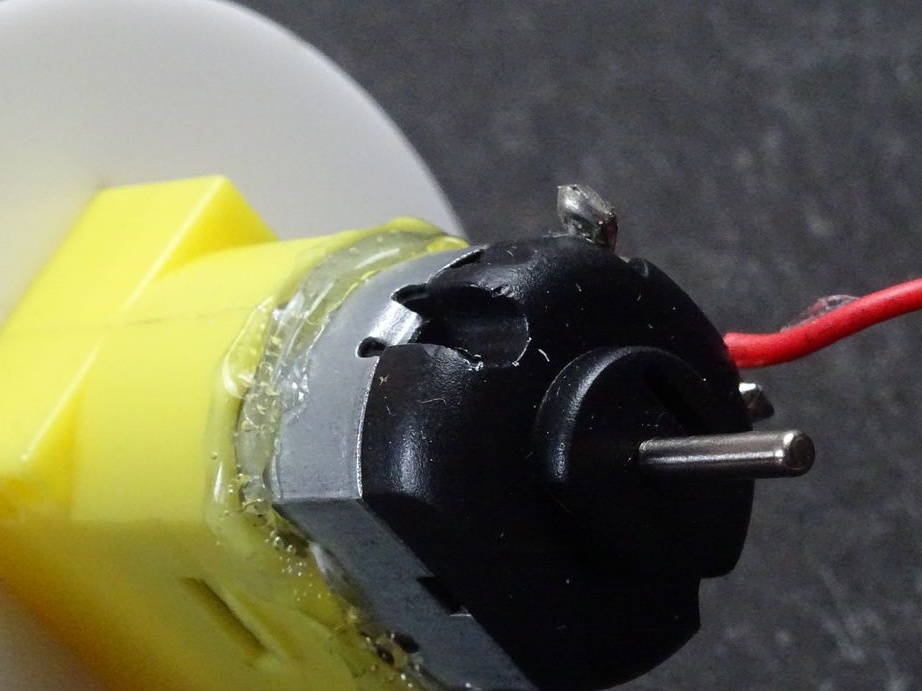
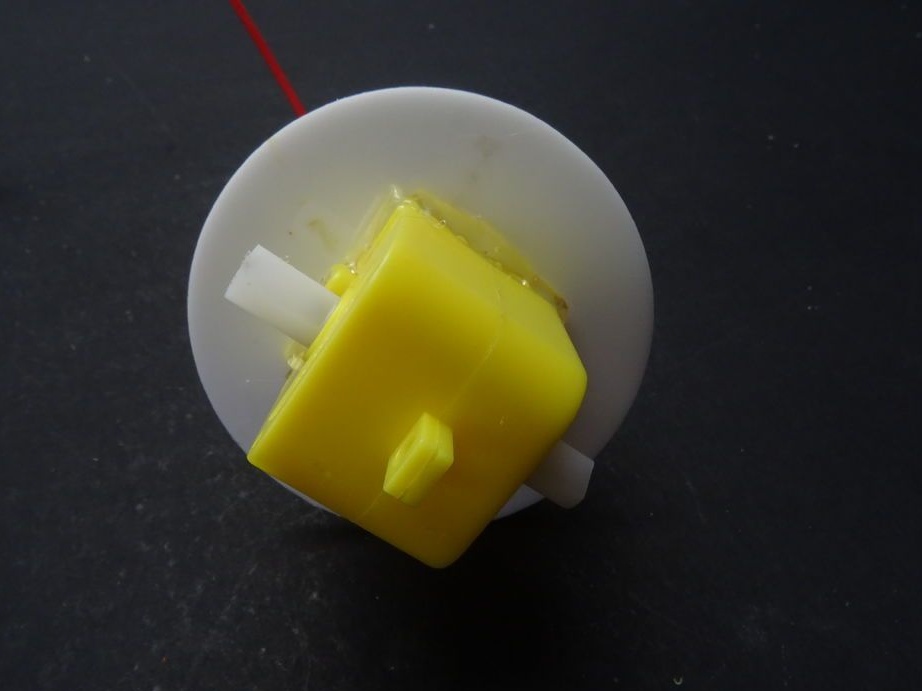
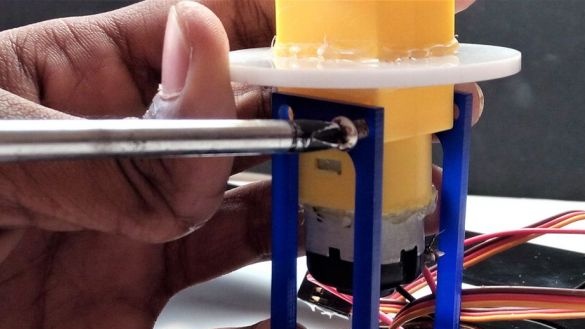
Hakbang Eight: Pag-tune ng Engine
Ngayon ay kailangan mong iproseso ang pambalot ng engine upang mai-install ang mga bahagi dito.
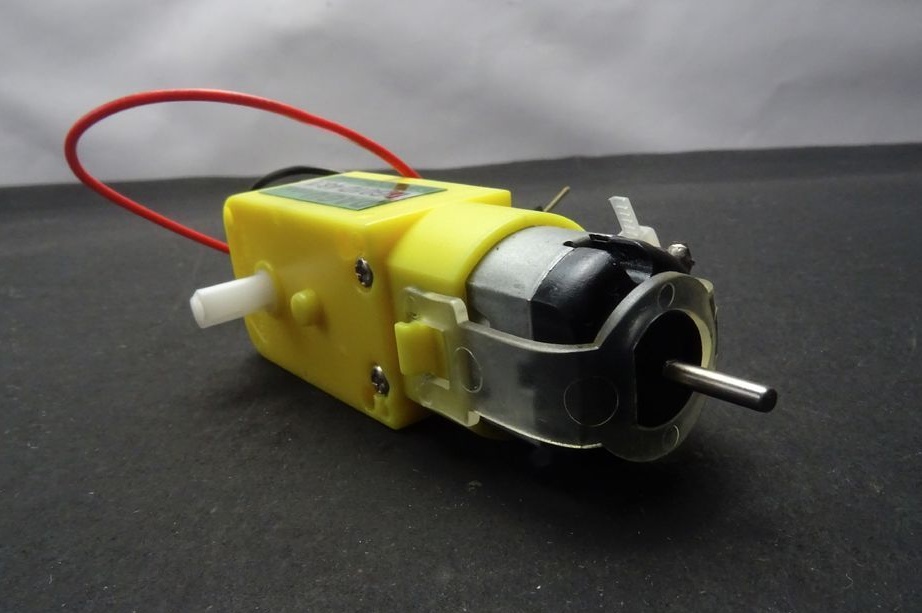
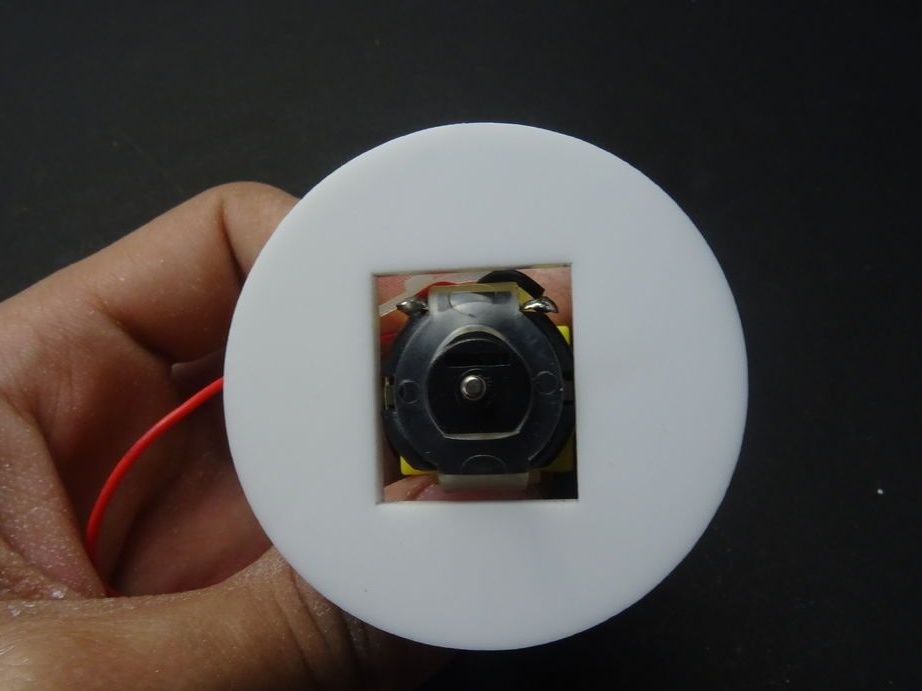
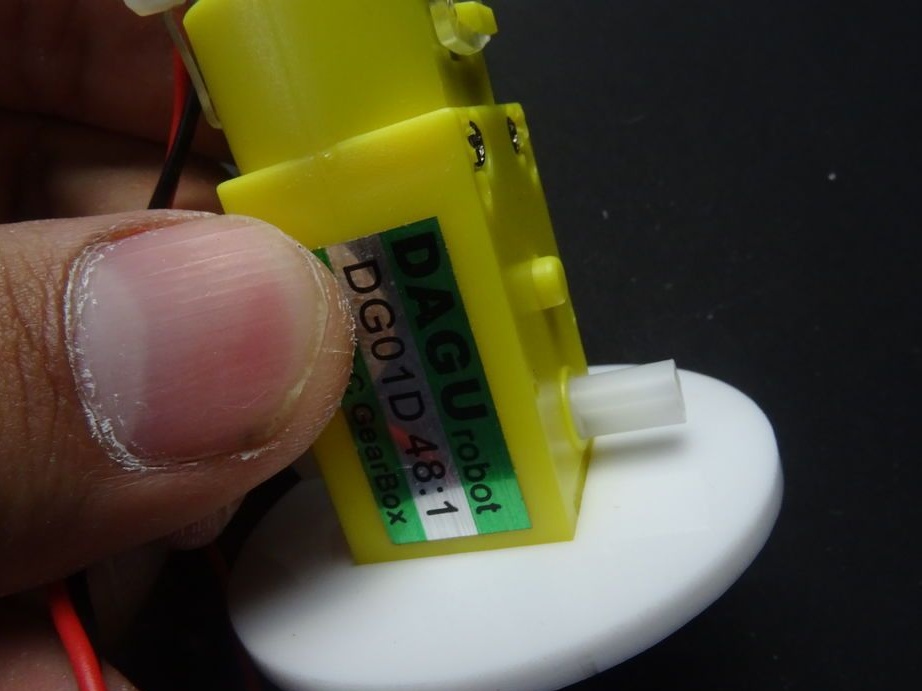

Cuts off ang lahat ng nakausli na bahagi mula sa katawan, hanggang sa sticker.
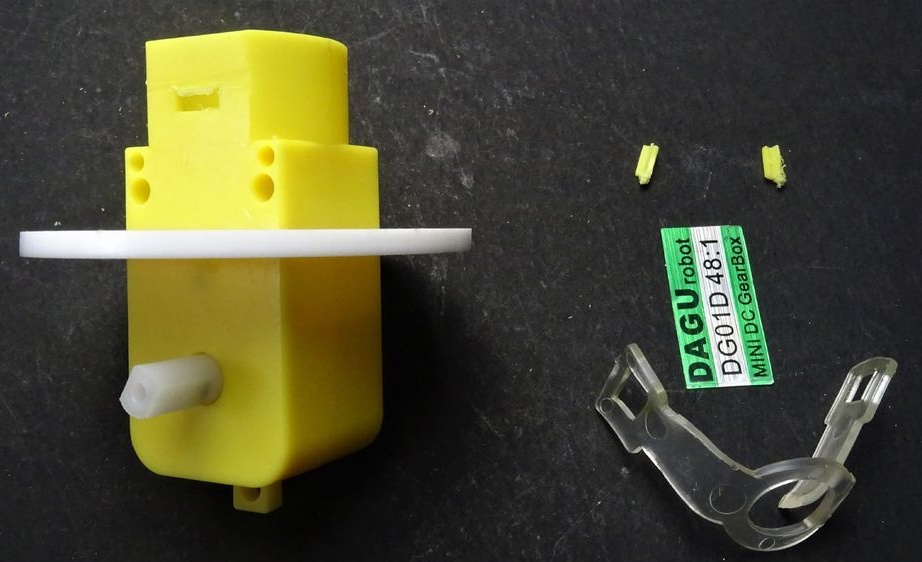

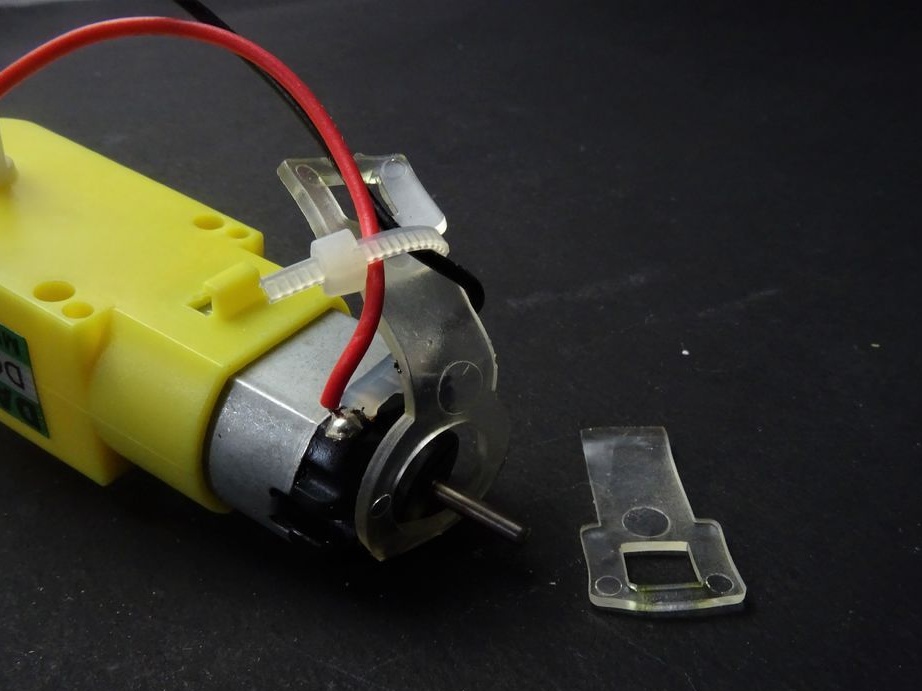
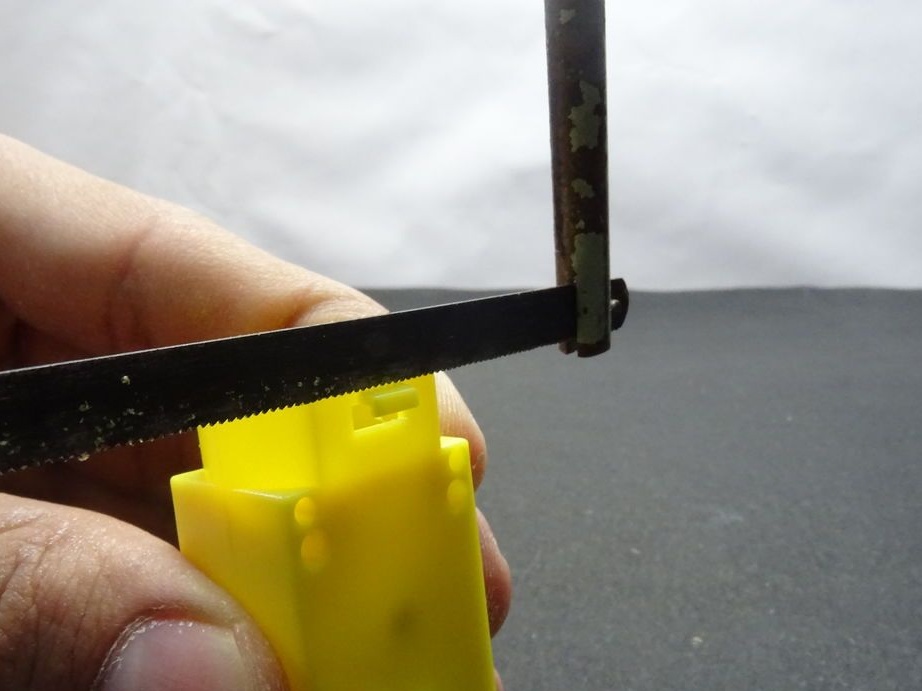


I-install ang bahagi sa katawan at glues ito. Dahil kinakailangan upang putulin ang engine mount (mga latch), ang engine ay nag-aayos din gamit ang pandikit

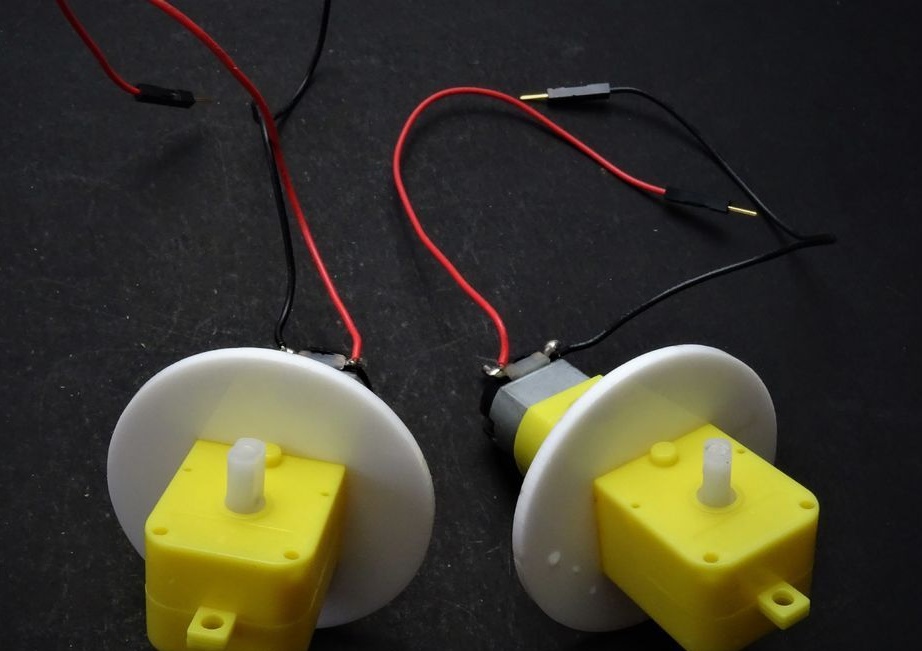

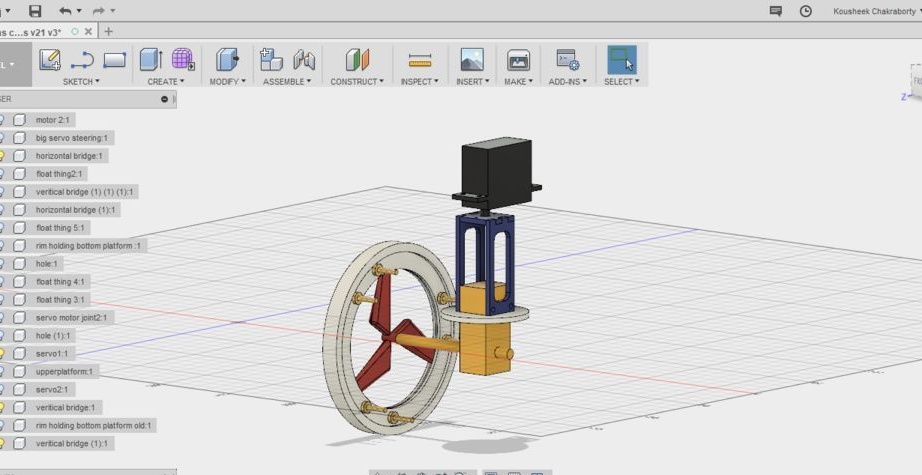
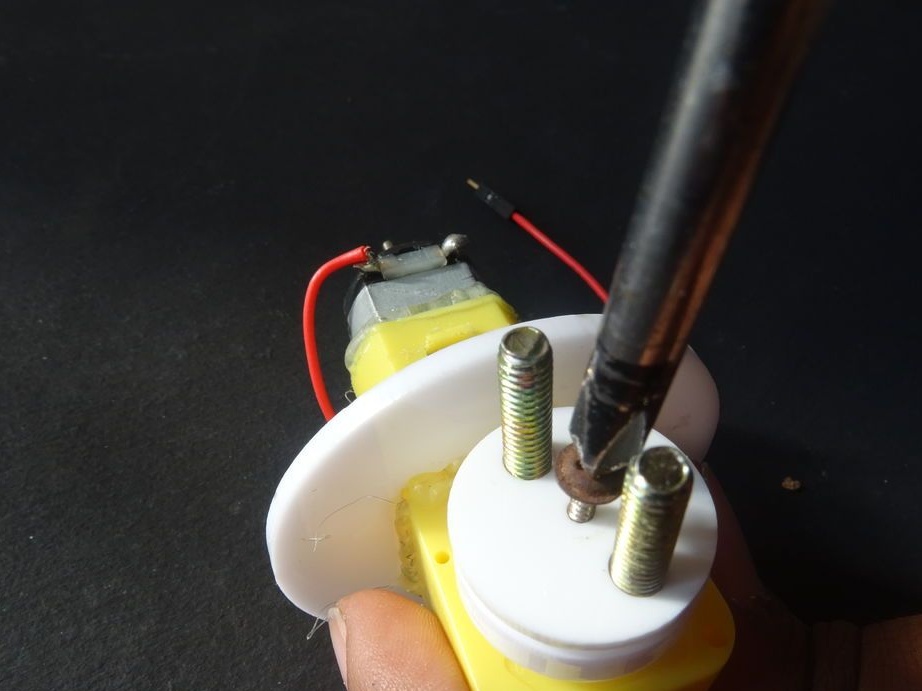
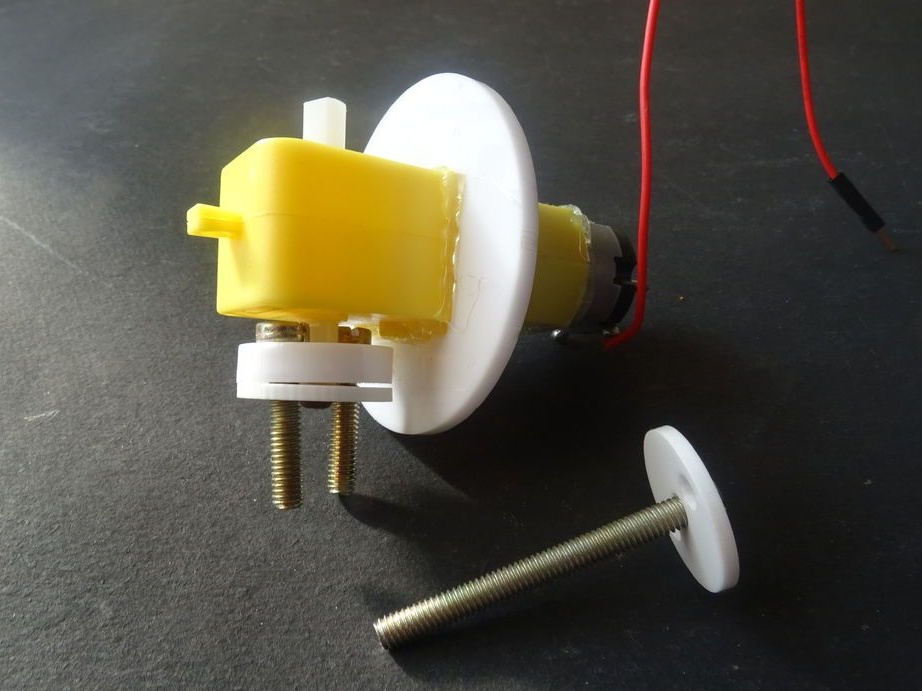
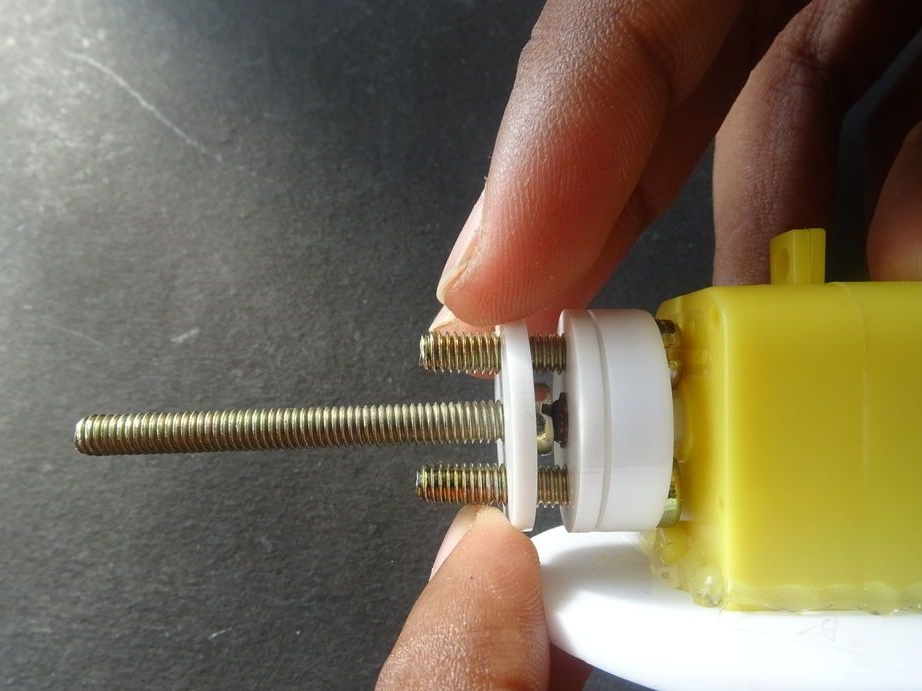
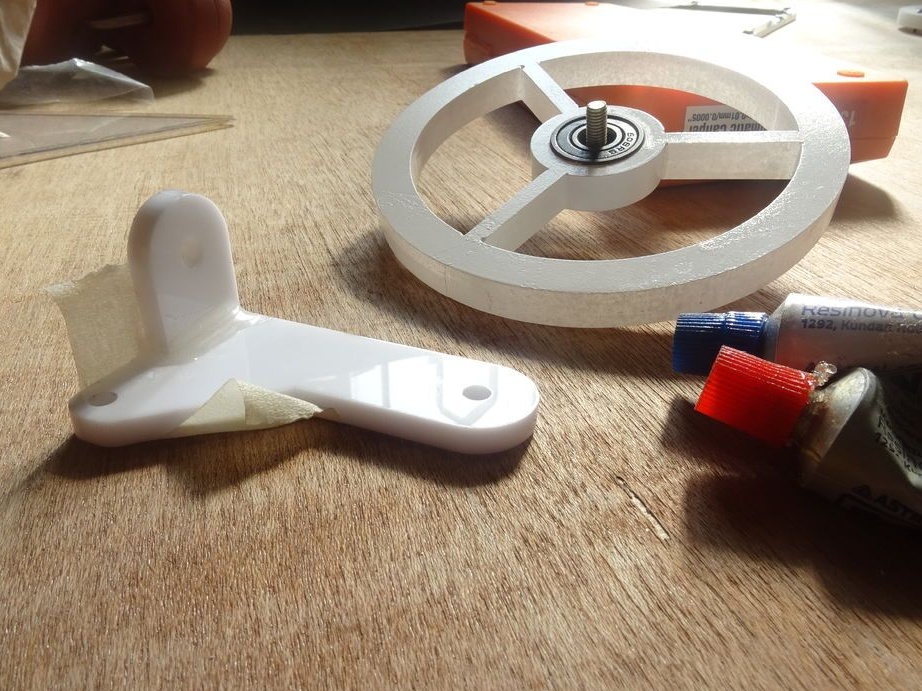
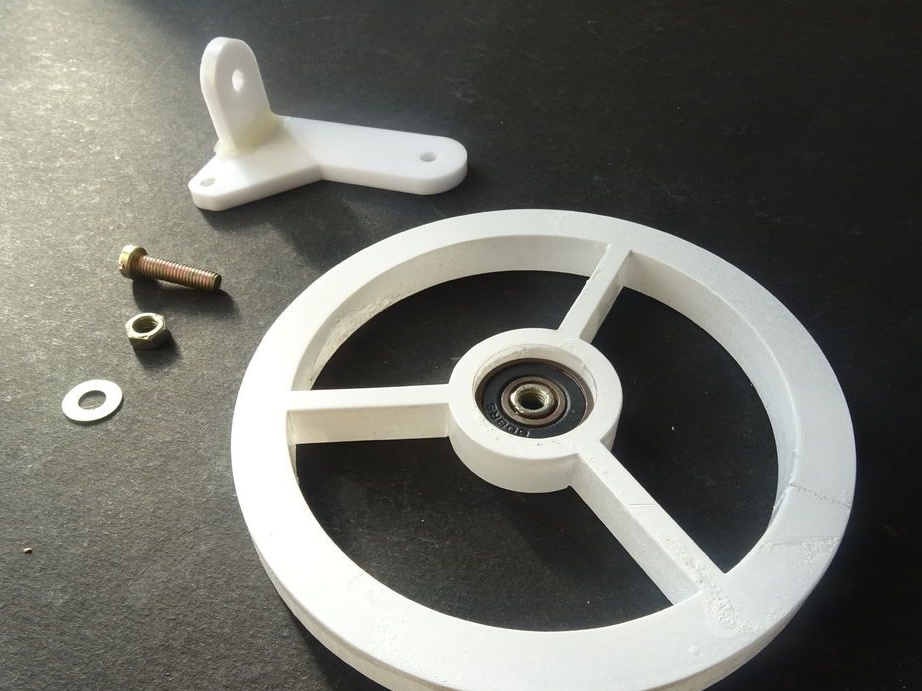
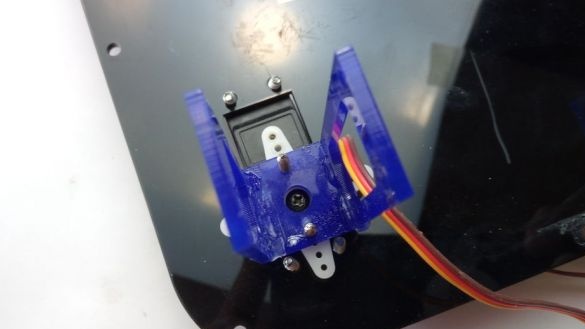
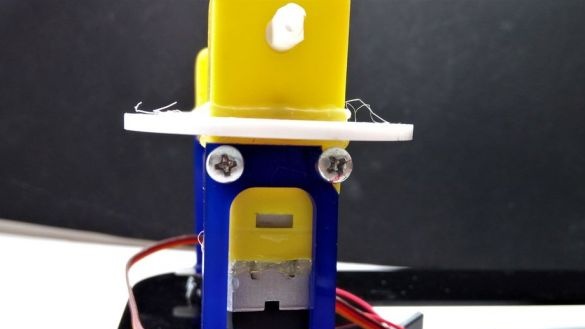
Hakbang Siyam: Mekanismo ng Swivel
Nagtitipon ng isang umiinog na pabahay. Ang isang engine ay mai-install sa ito, at kumonekta ito sa servo drive.
Glues ang kaso.

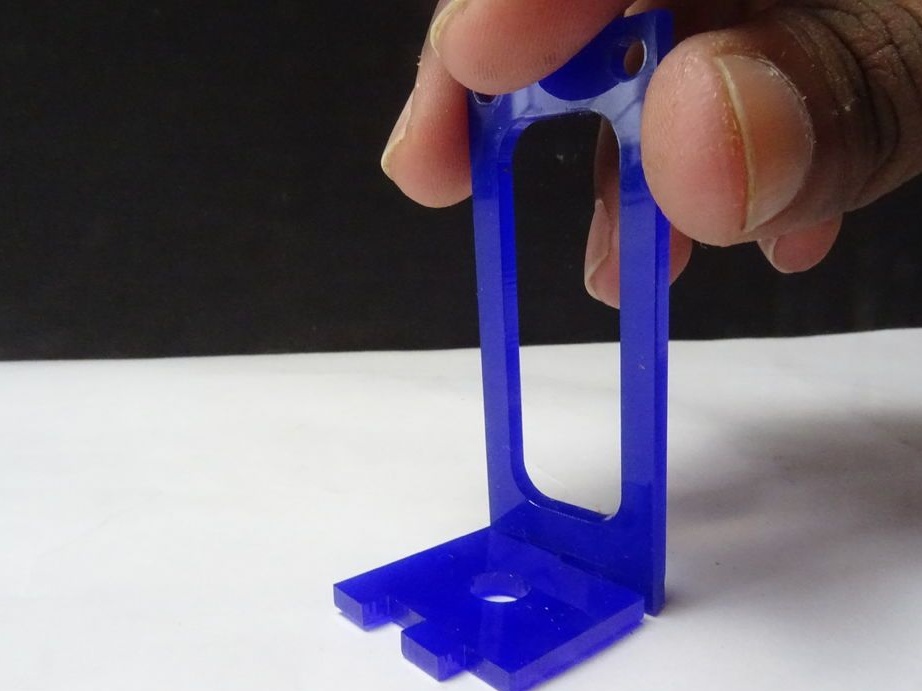

Mga screw sa coupler.


Hakbang Sampung: Pagpinta
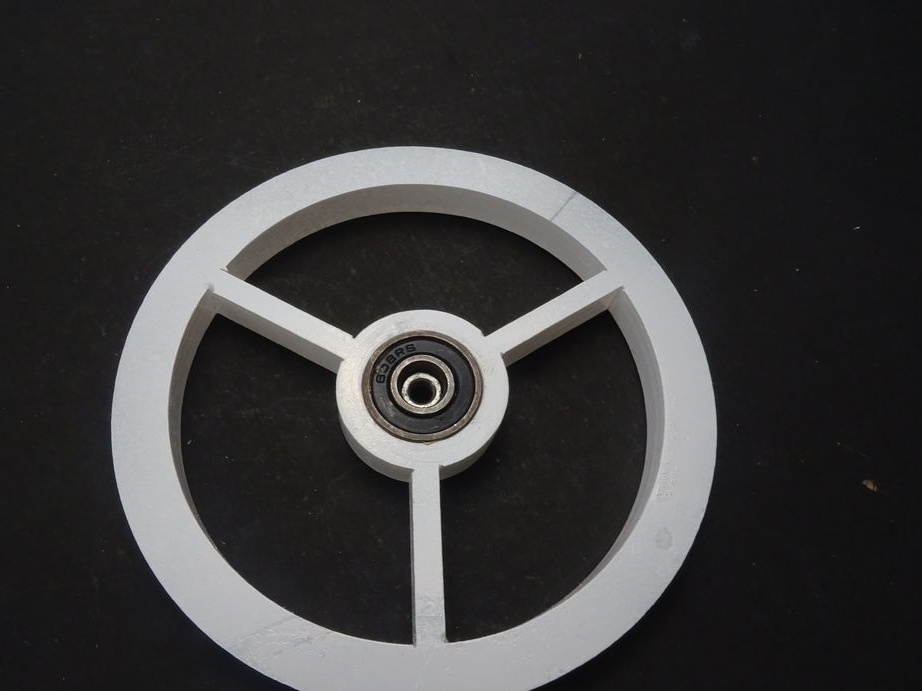
Dahil ang master ay walang puting acrylic ng kinakailangang kapal, ang mga gulong at rim ay pinutol ng transparent acrylic at pagkatapos ay pininturahan ng puti.




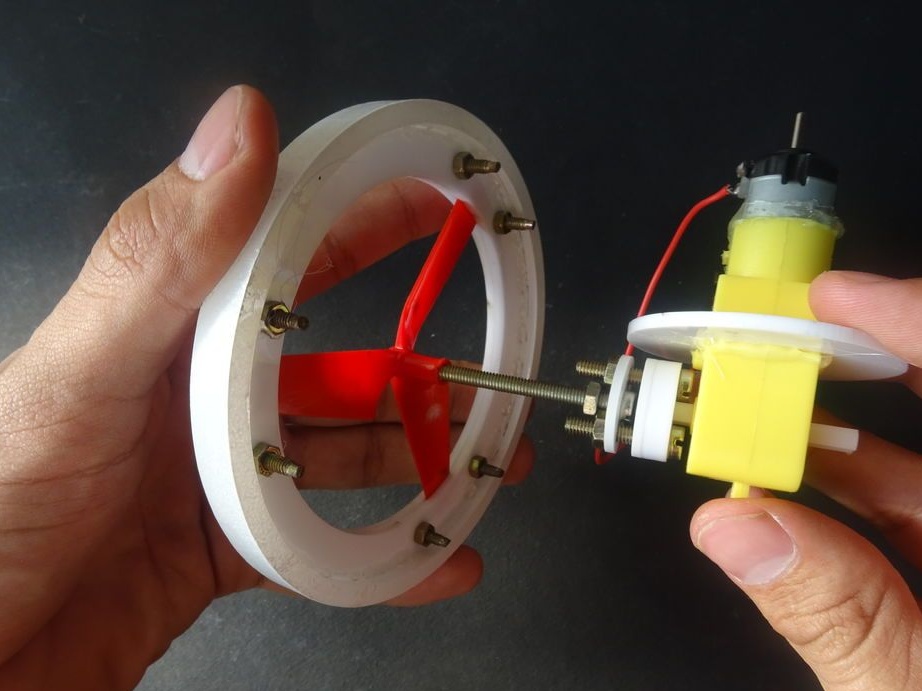
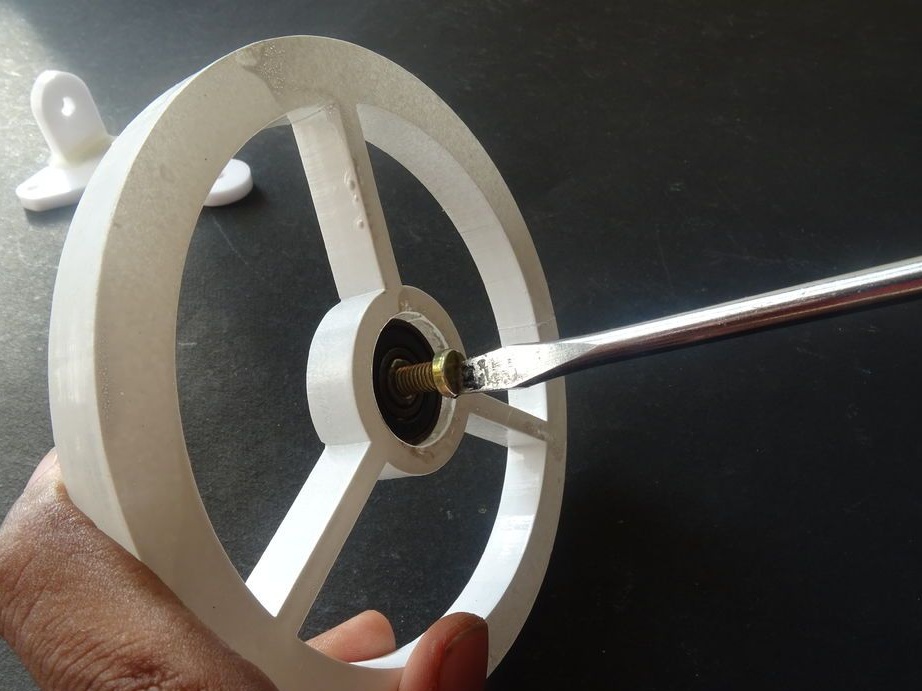
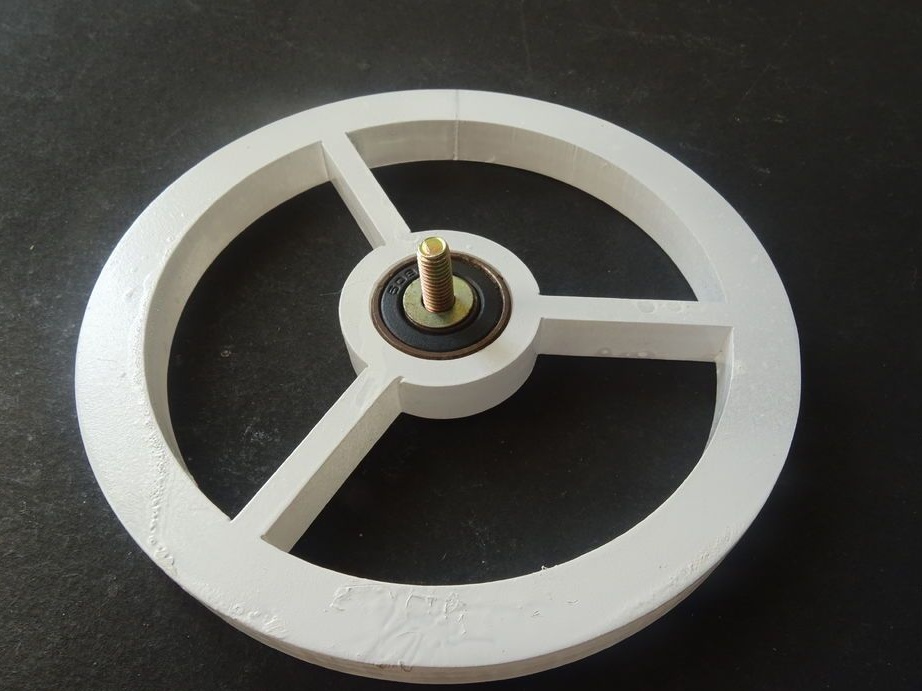
Hakbang Eleven: Wheel Assembly
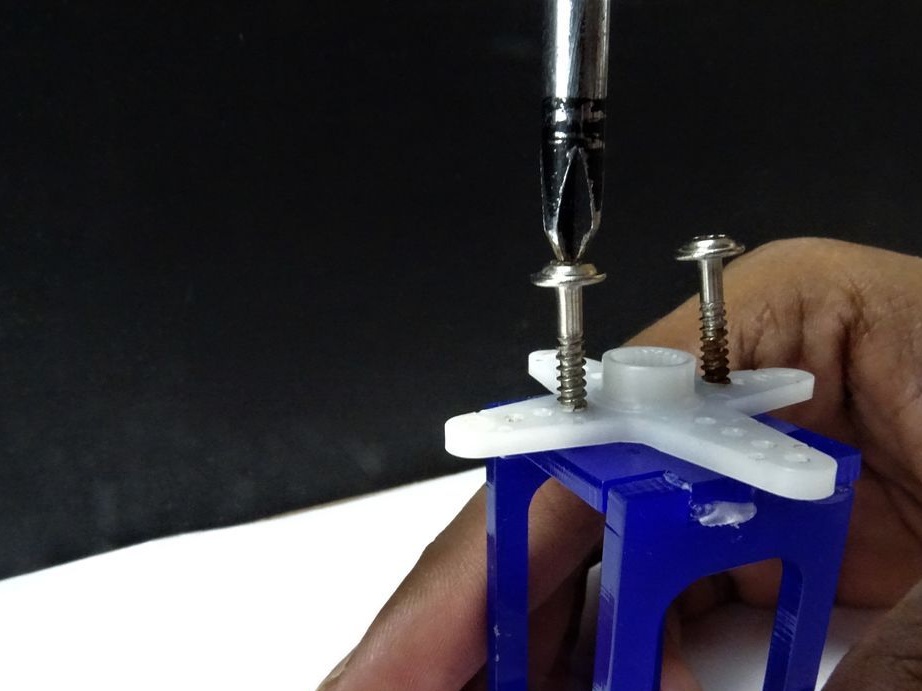
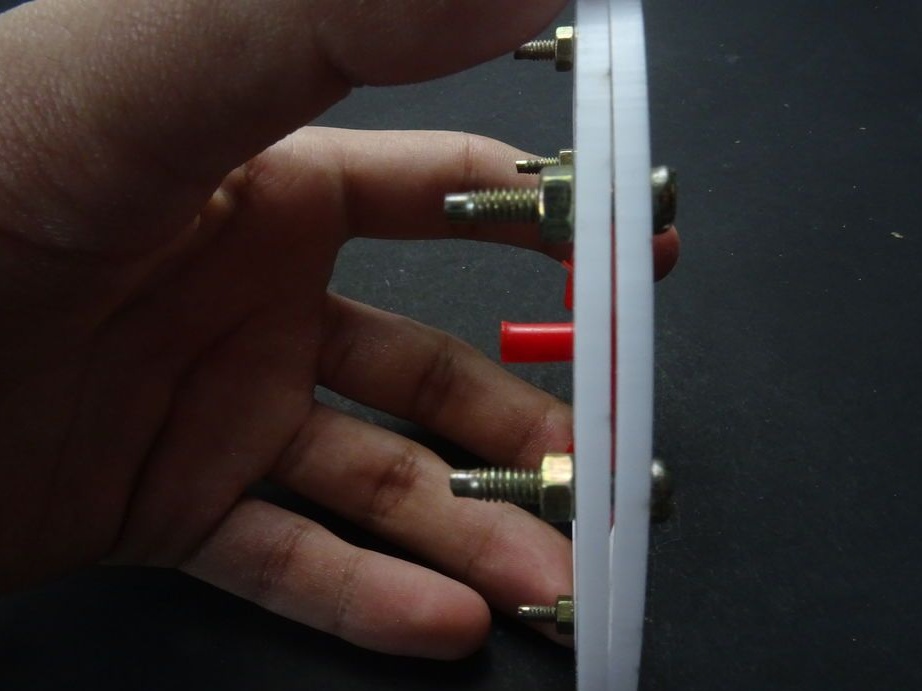
Sa mga bolts ay nangongolekta ng dalawang gulong rims. Ang mga tornilyo ay hindi ganap na mahigpit.




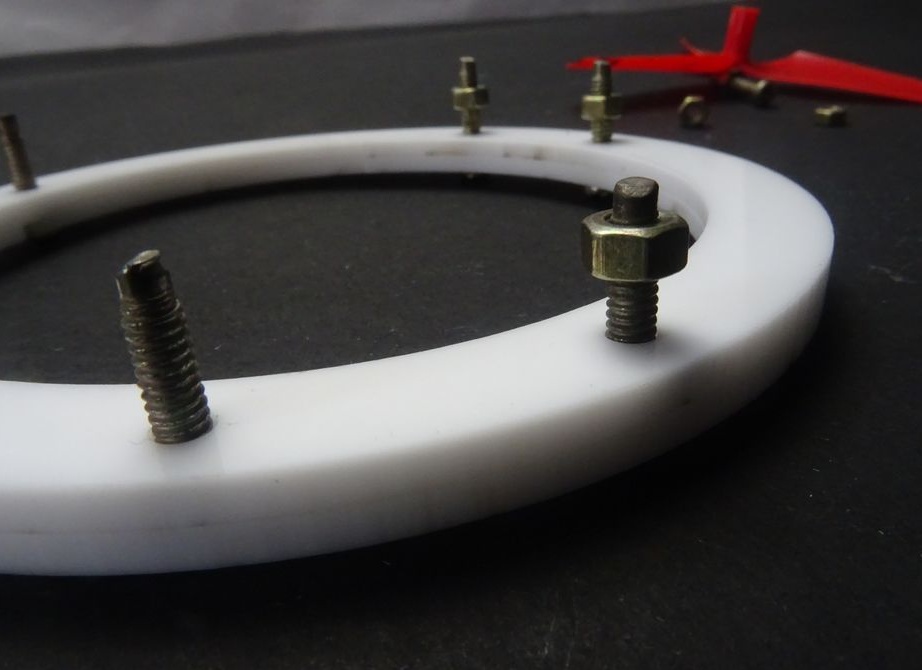
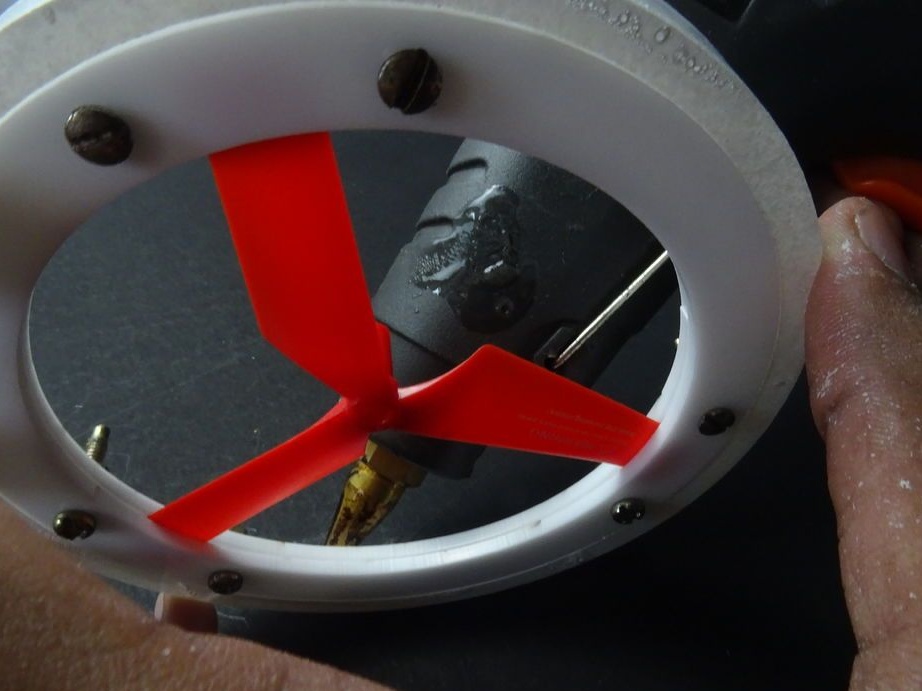
Sa pagitan ng mga disk ay nag-install ng mga turnilyo at mahigpit ang mga turnilyo. Kapag nag-install ng tornilyo, dapat mong gamitin ang template upang isentro ito.
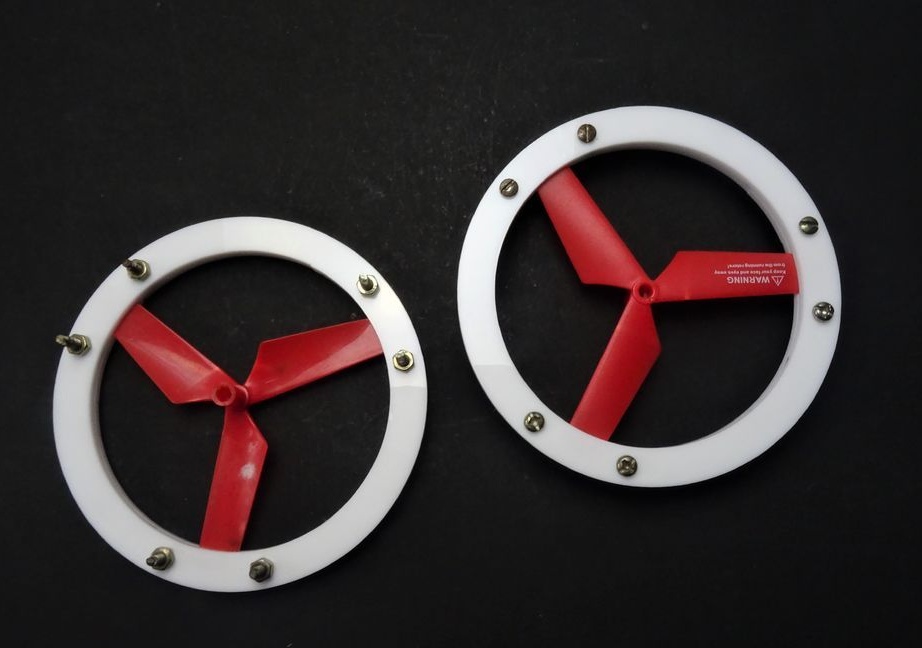
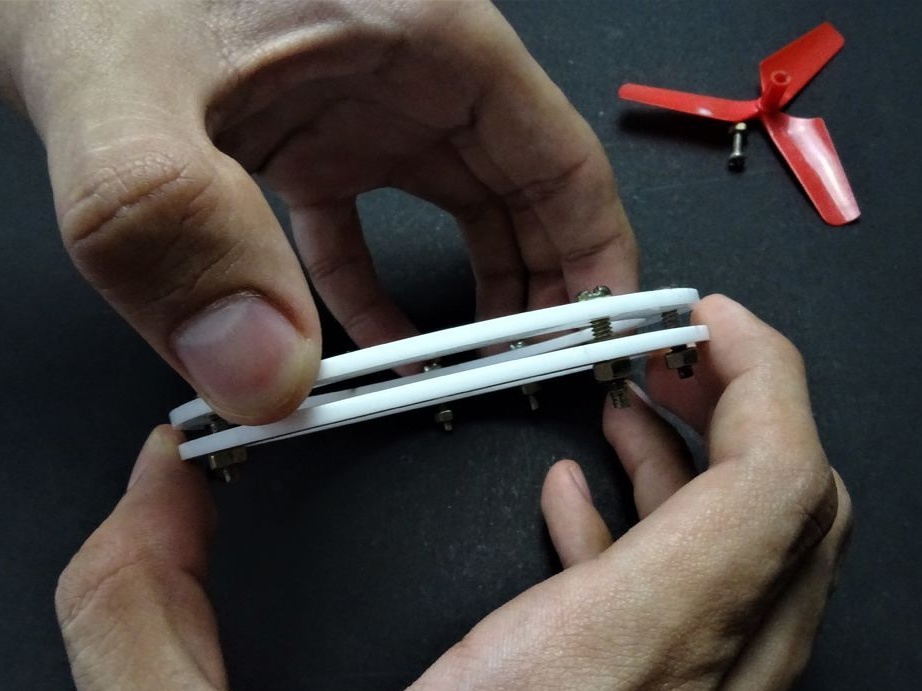
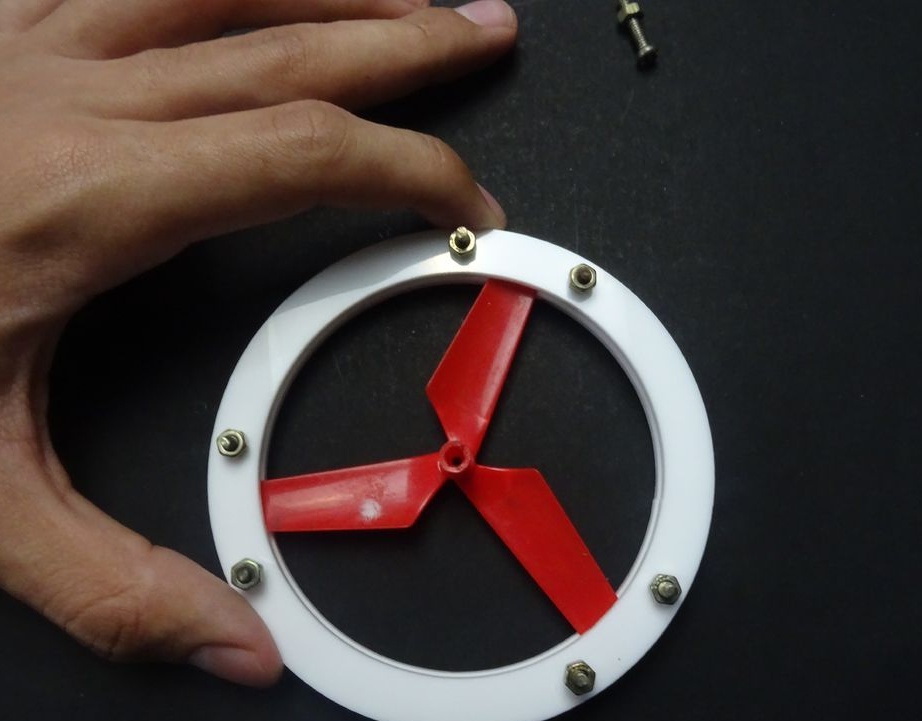

Itinatakda ang panlabas na rim ng gulong. Ang rim ay dapat na flush na may panloob na disk.
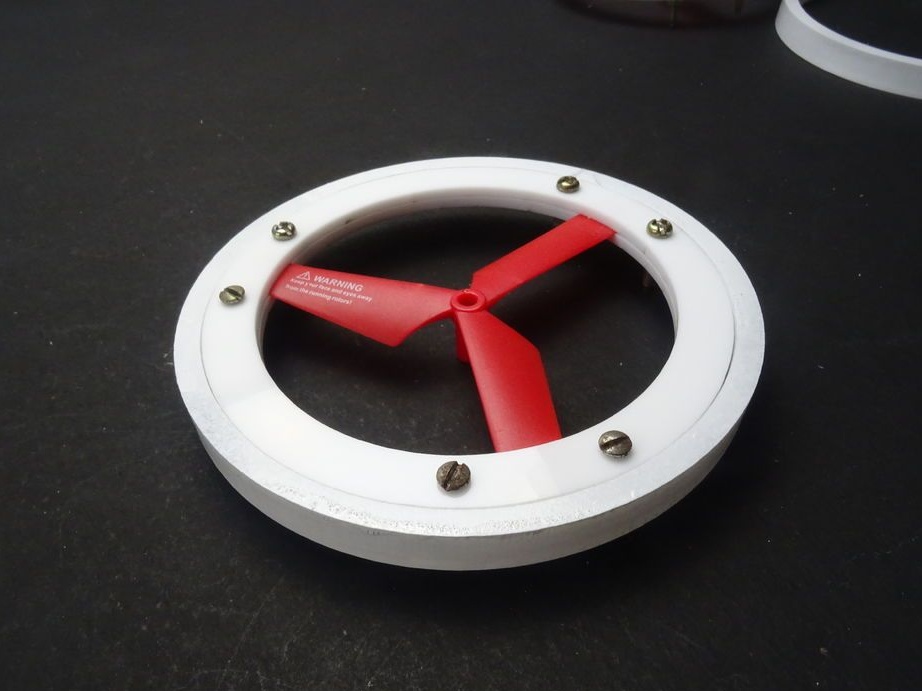

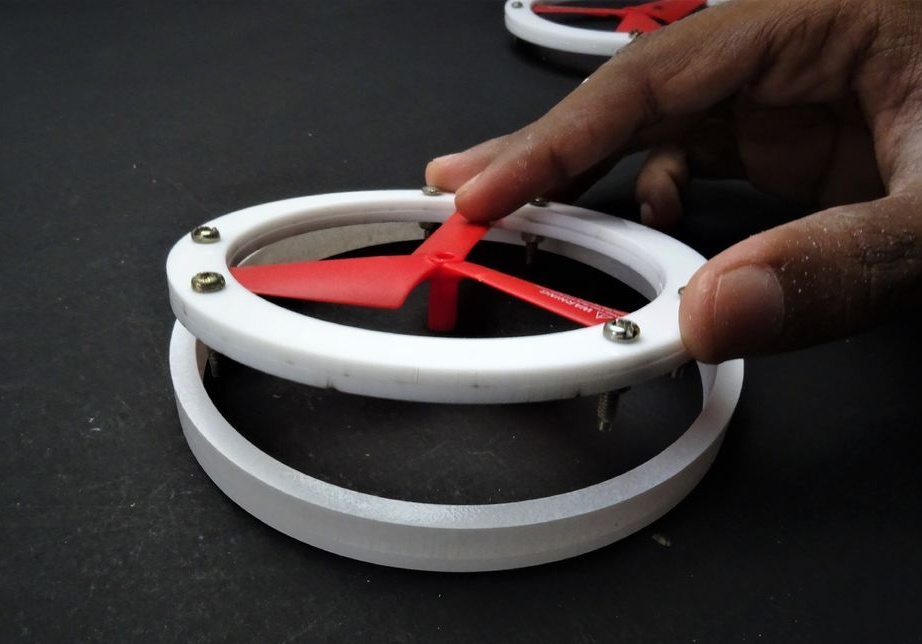
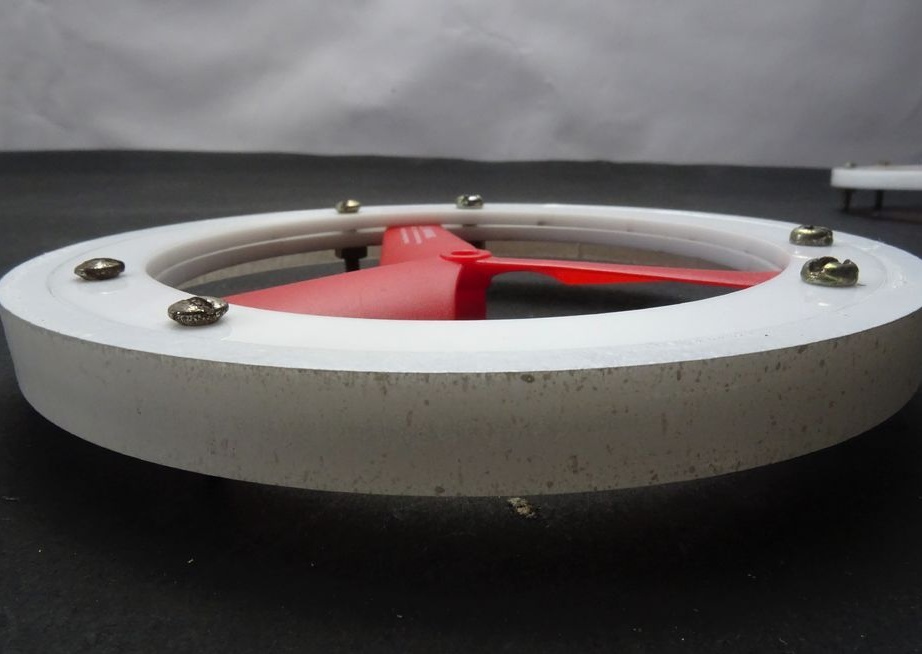

Mag-apply ng mainit na pandikit sa kasukasuan.


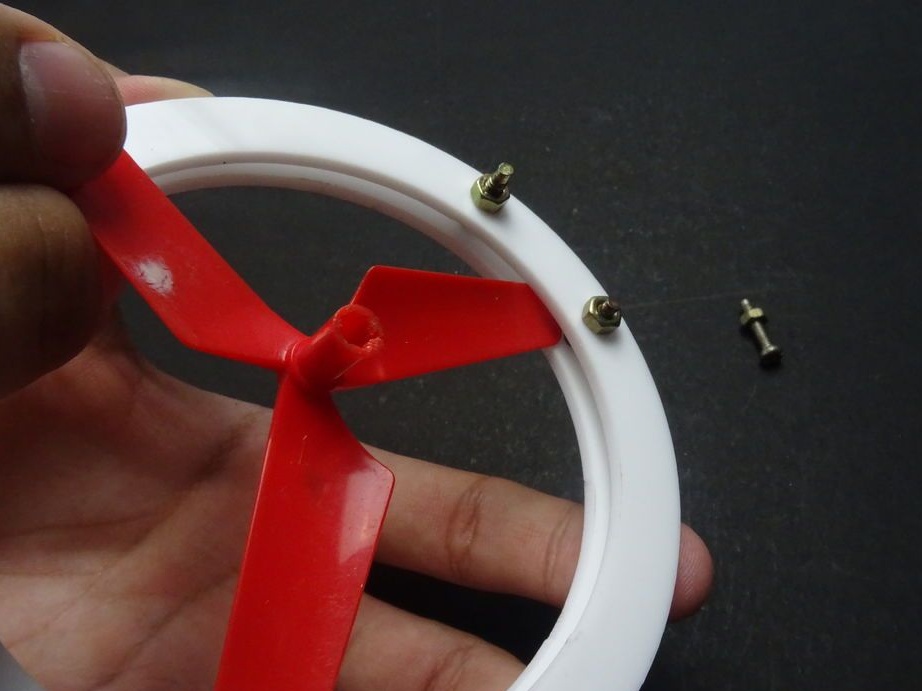
Nangongolekta ngayon ang mga gulong sa harap.
Ang isang nut ng isang angkop na sukat na clog sa panloob na lahi ng tindig. Mga pagpindot sa mga gulong sa harap na gulong.



Handa na ang mga gulong.

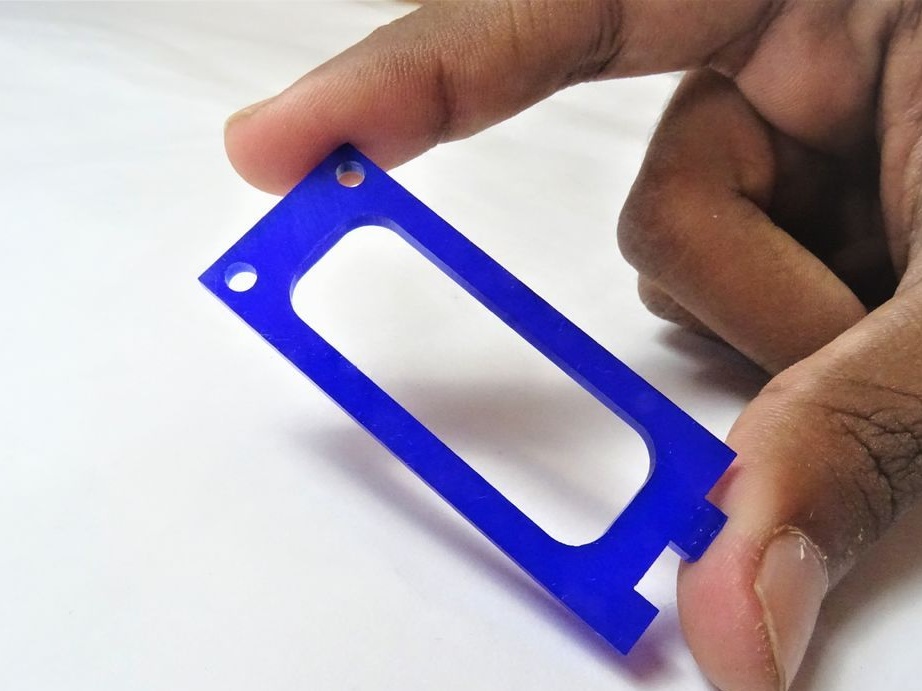
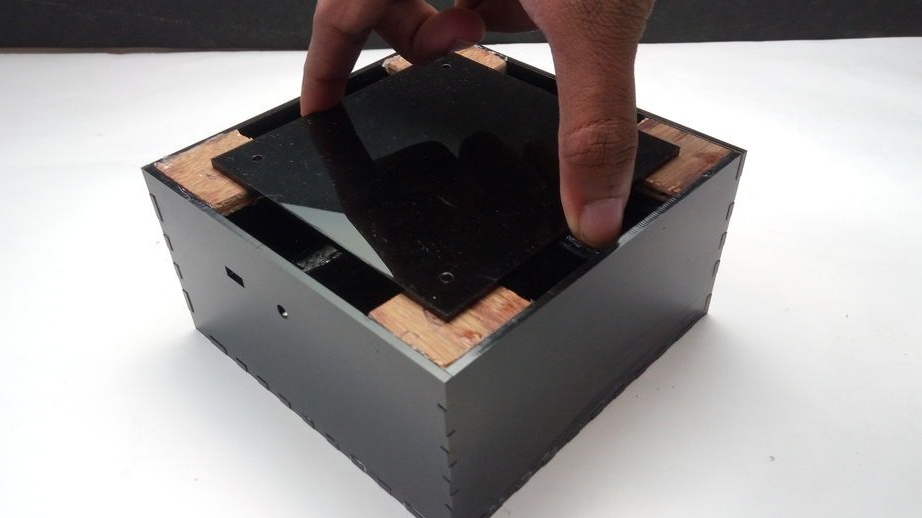
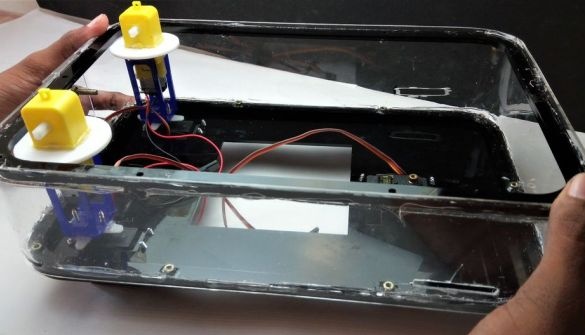
Hakbang Labindalya: Pagpapalitan ng Elektroniko
Glues ang pabahay para sa electronics.

Ang kahon na ito ay naglalaman ng lahat electronic mga sangkap, na nangangahulugang kailangang ma-waterproofed nang lubusan hangga't maaari.


Apat na mga parisukat ay pinutol at nakadikit mula sa board sa mga sulok ng kahon. Ang takip ng kahon ay idikit sa kanila.



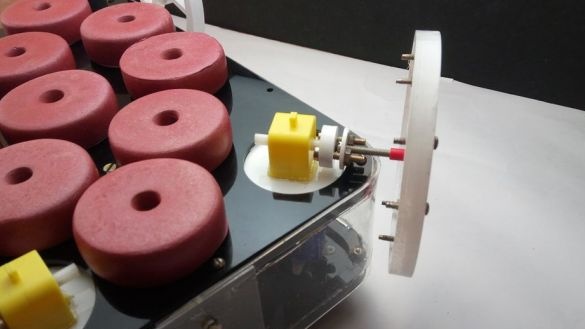
Hakbang Labintatlo: Wheel Mount
Ngayon ay kailangan mong ikonekta ang mga gulong at gear na may isang klats.





Mga gulong sa harap na mga gulong sa traksyon.


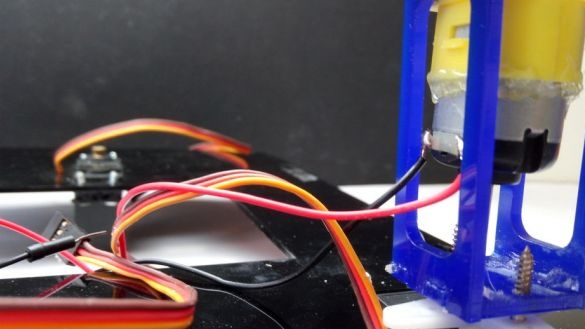
Hakbang labing-apat: Ikonekta ang Elektronika
Ayon sa scheme, nag-install ito ng mga de-koryenteng bahagi.
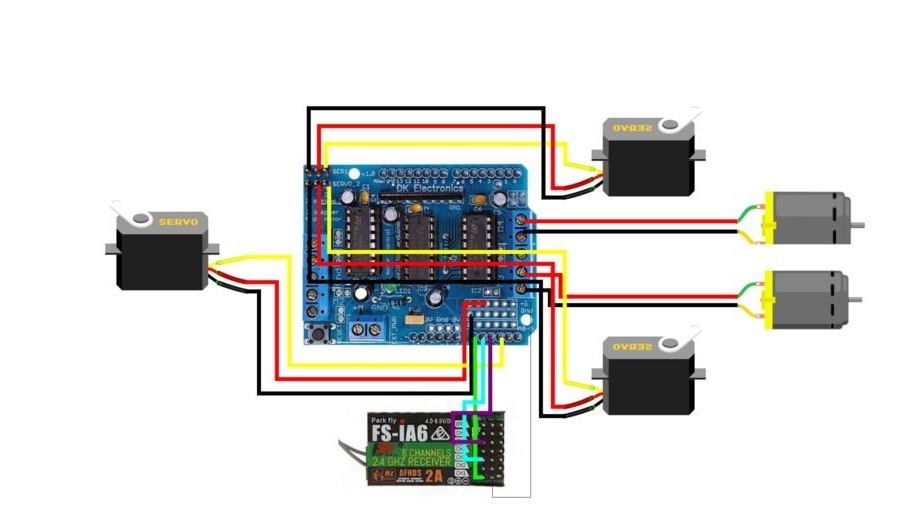

Ang mga wire ng kaliwang engine sa M1, ang kanan sa M2. Kumokonekta sa isang driver ng engine. Kumokonekta sa mga servo. Nag-install ng tatanggap: gnd ng tatanggap upang gnd Arduino; +5 V na tatanggap sa +5 V Arduino; pin 3 hanggang A0; pin 1 hanggang A1; pin 5 hanggang A2. Kumokonekta sa baterya.
Limang Hakbang: I-download ang Code
Una kailangan mong mag-download ang library.
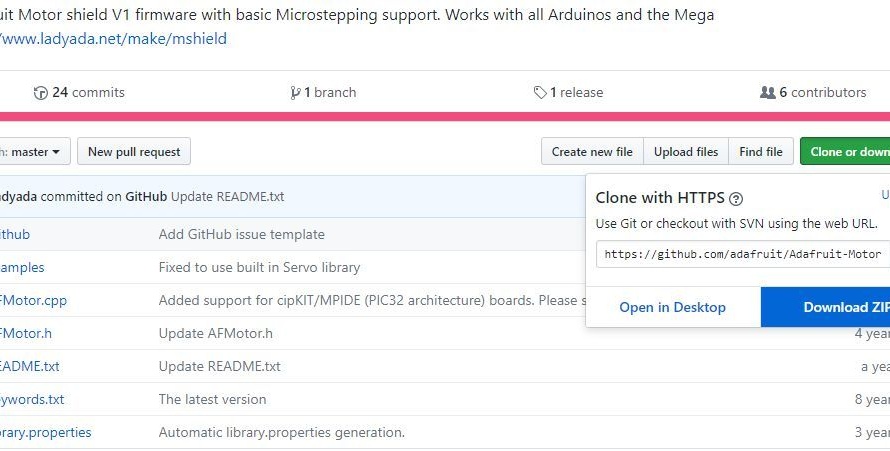
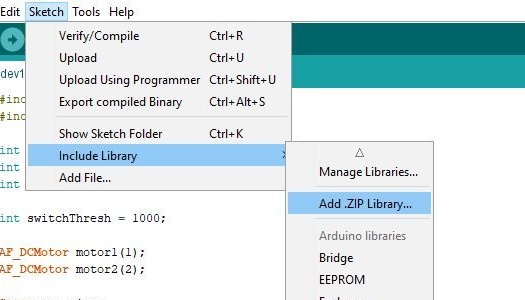
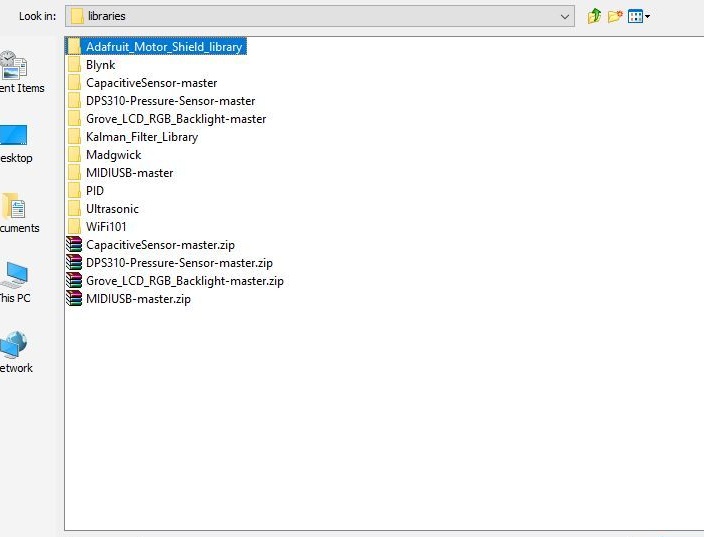
Susunod, i-download ang code. Kapag naglo-load, dapat na idiskonekta ang baterya.
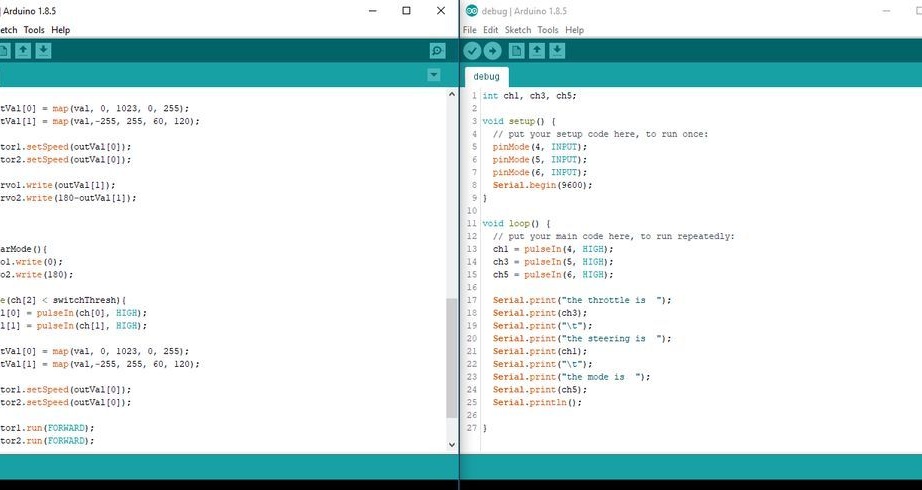
I-download ang code sa ibaba.
amphibious_rover_code.ino
Matapos i-download ang code, sinusuri nito ang pagpapatakbo ng mga motor at drive.
Hakbang labing-anim: pagpupulong
Ngayon ay oras na upang mag-ipon ang all-terrain na sasakyan.
[gitna[/ gitna]
Mga pag-install ng mga servo. Mag-install ng mga motor na de motor.

Pabilis ang mga gulong. I-twist ang parehong halves ng katawan.






Ang lahat ay handa na at ngayon maaari kang subukan.