


Kaya, ang pagkuha ng teknolohiyang lego mula sa aking anak, at sa bahay Arduino Sinimulan ni Nano na pagsamahin ang mga designer na ito.
Kakailanganin namin:
- Lego Technic (kit 42029 at 42033)
- Arduino Nano (link sa board)
- DRV 8833
- 2 servo ang nagtutulak sa SG-90
- Tanggap ng IR
- motor motor
- 2 LEDs
- 2 resistors 150 ohms
- Capacitor 10v 1000uF
- 2 solong hilera ang sumali sa PLS-40
- 2 mga konektor ng PBS-20
- Inductor 68mkGn
- 4 na baterya NI-Mn 1.2v 1000mA
- Konektor ng tatay-nanay ng dalawang pin sa kawad
- Homutik
- Mga wire ng iba't ibang kulay
- nagbebenta
- Rosin
- paghihinang bakal
- Bolts 3x40 at nuts at tagapaghugas para sa kanila
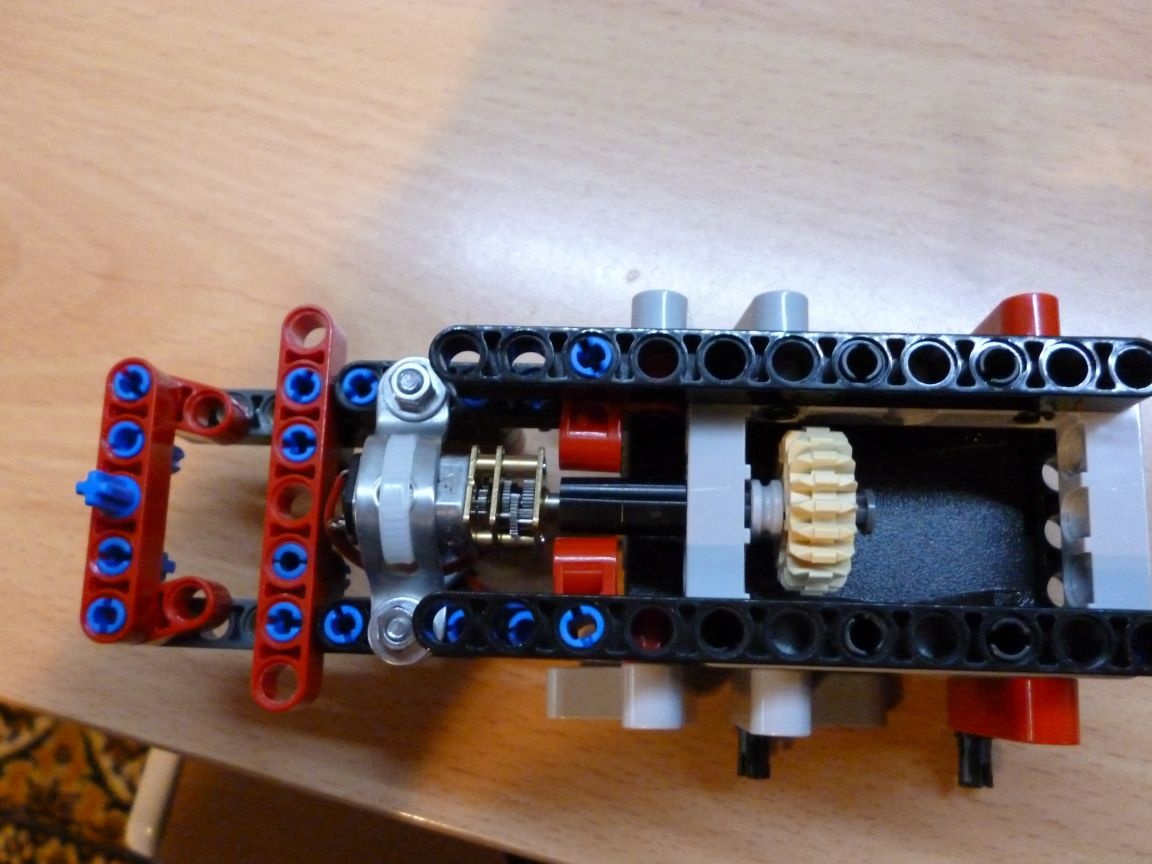
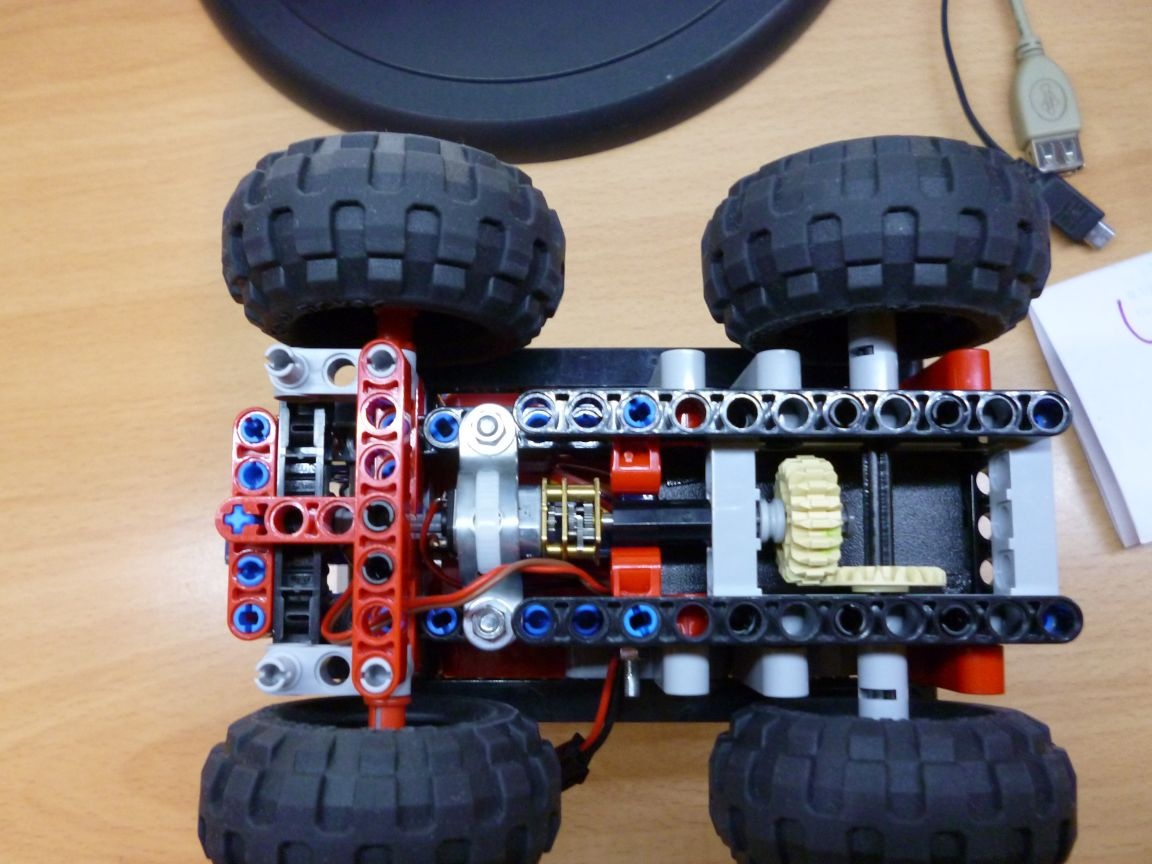
Hakbang 1 tipunin ang tsasis at magmaneho ng ehe.
Maaari kang mag-ipon ng anumang mga tsasis mula sa Technic, pa rin, ito ay naging tulad nito.
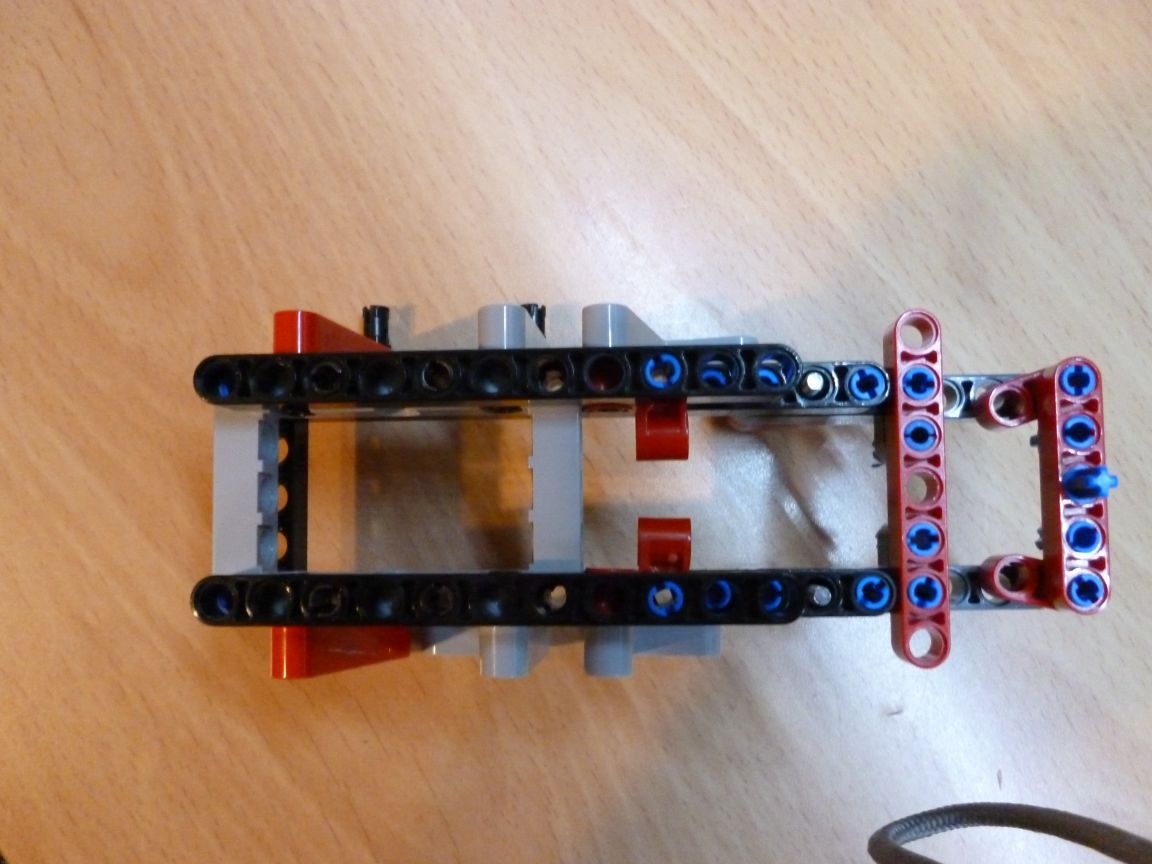
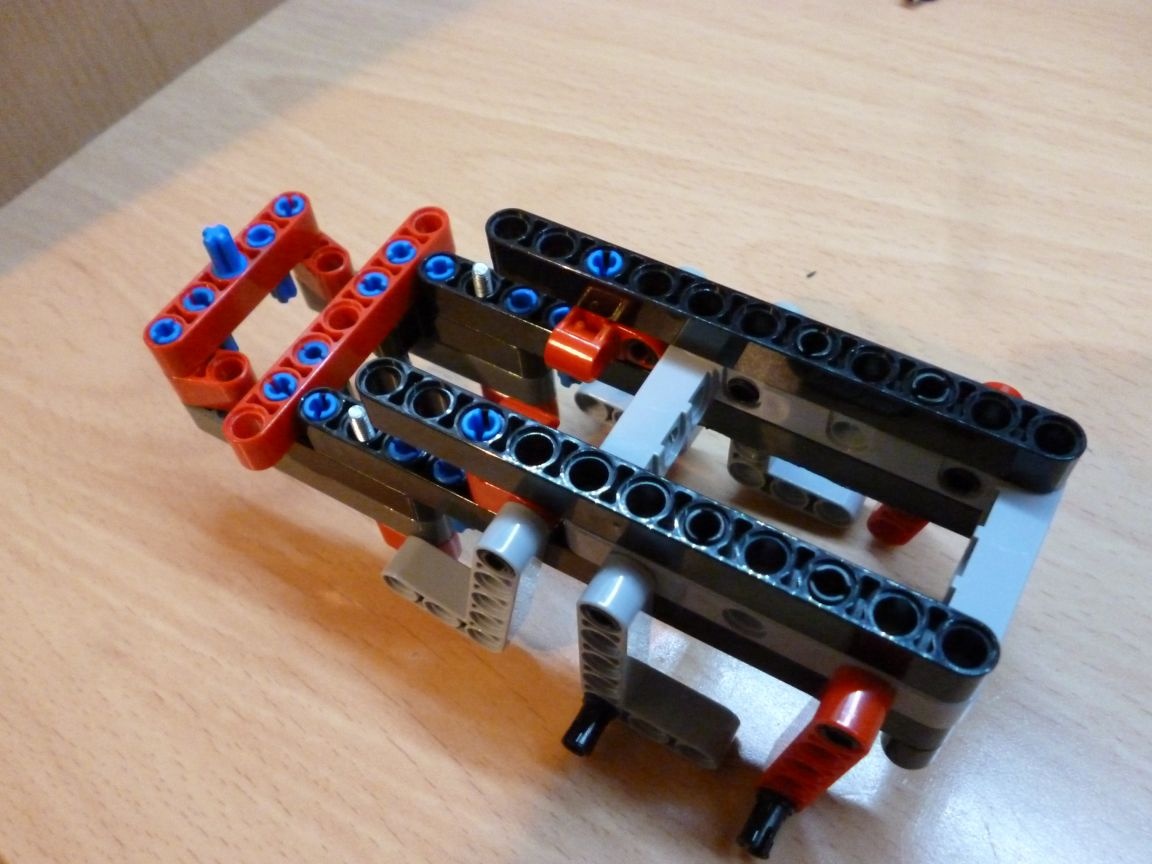
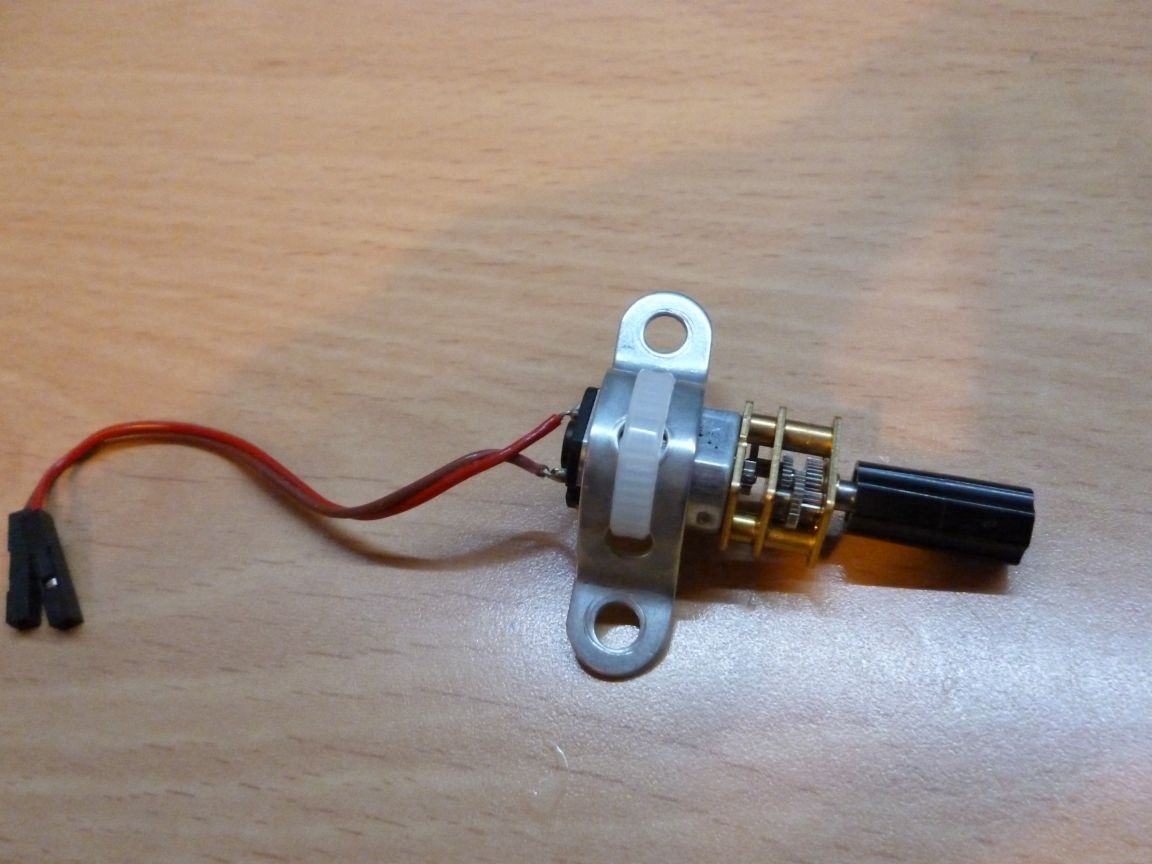
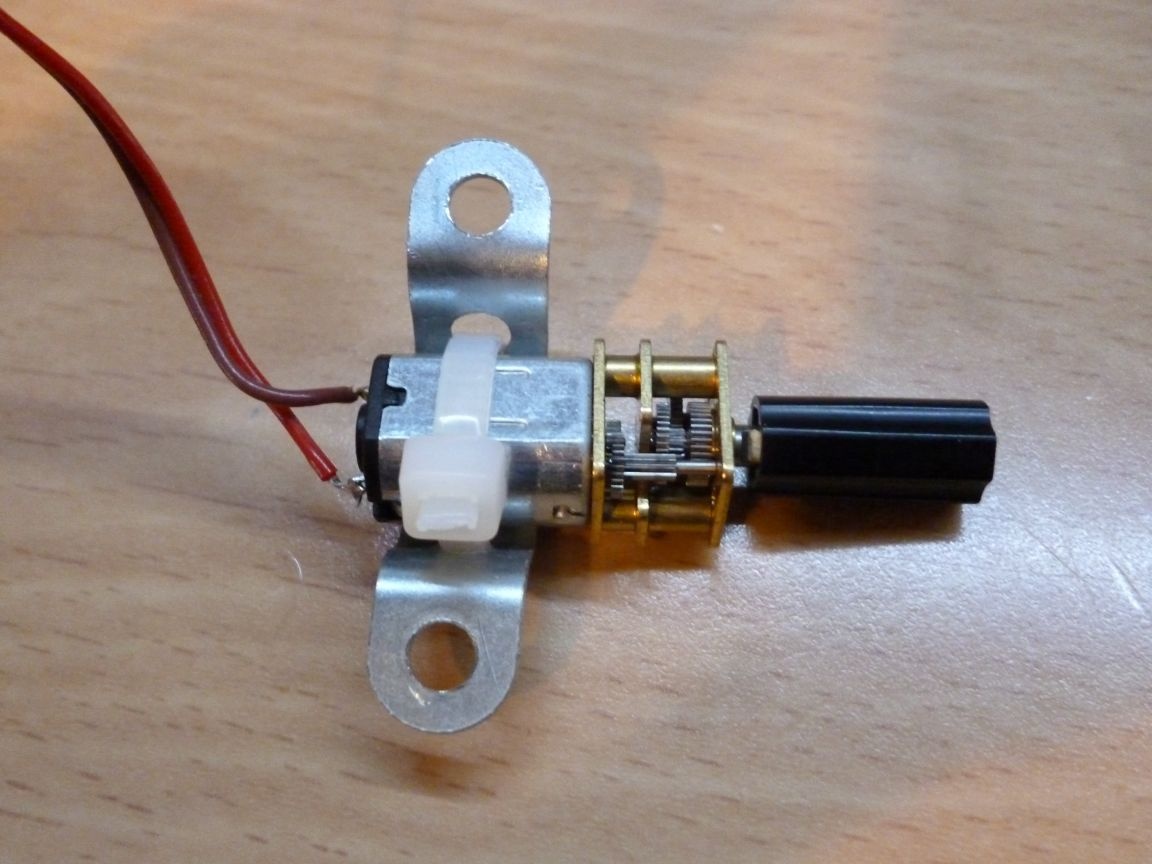
Mayroon lamang problema sa pagkonekta sa motor motor sa mga bahagi ng taga-disenyo. Napagpasyahan ko ito tulad ng sumusunod: ilagay sa axis ng gearmotor ang isang pagkonekta ng manggas at ipinasok ang isang scrap ng isang tugma para sa pag-aayos. Para sa pag-mount ng motor motor na ginamit na metal plastic mula sa isang disenyo ng bakal at isang salansan. Ito ay ang mga sumusunod:
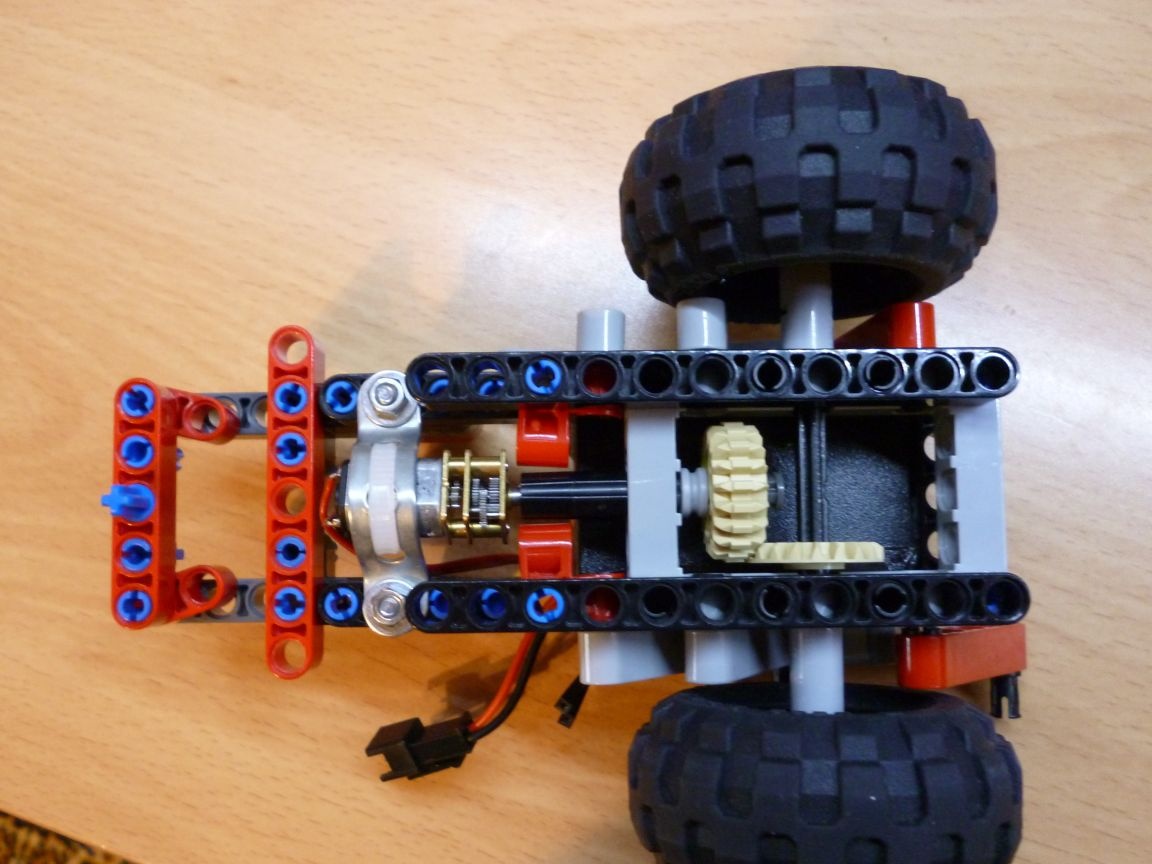
Susunod, mai-install namin ang nagresultang disenyo sa tsasis gamit ang 3x40 bolts:
At ilagay sa mga gulong:
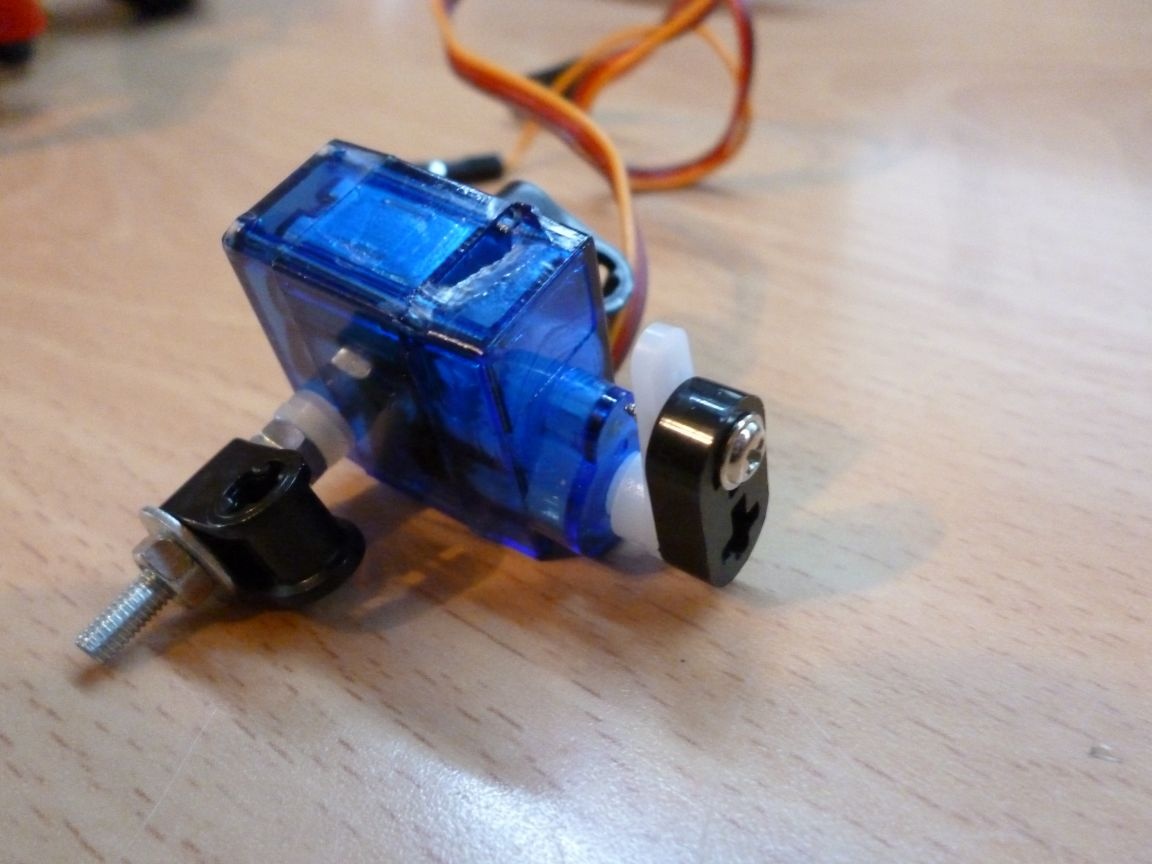
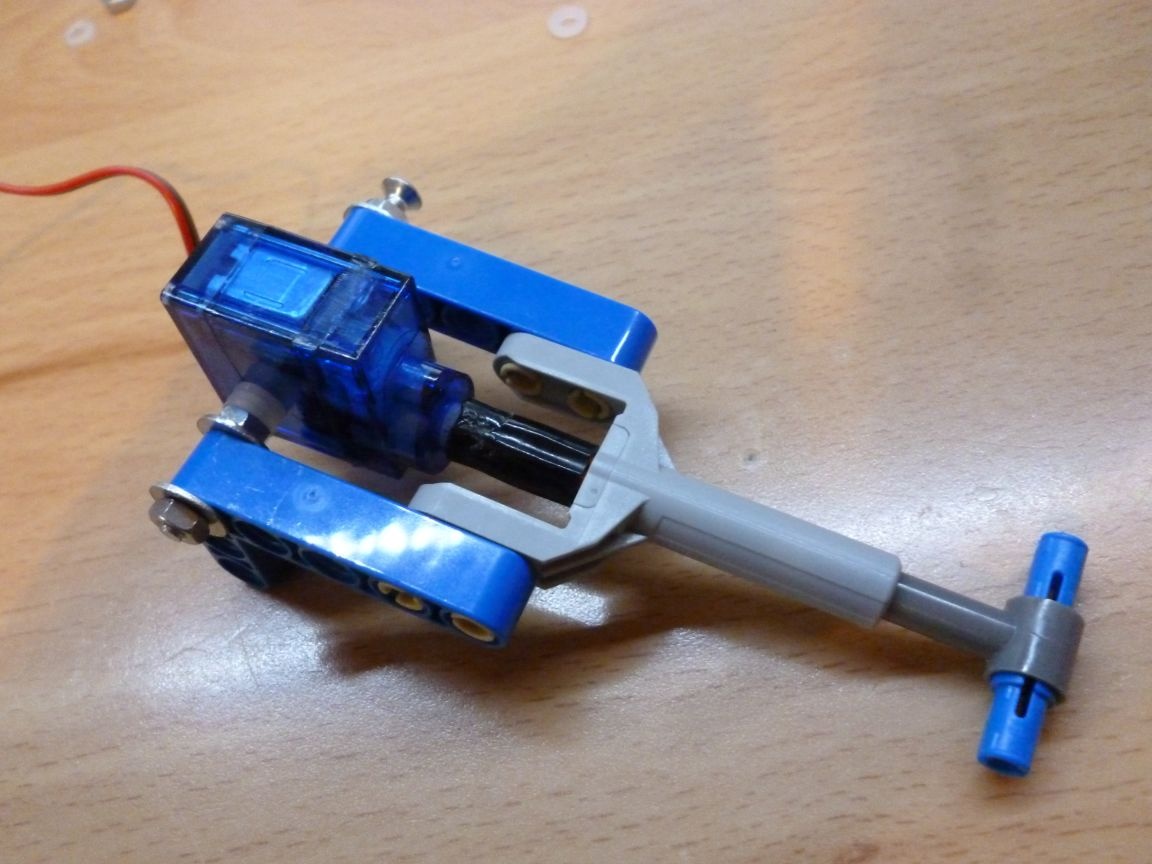
Hakbang 2 swivel gulong
Upang maisagawa ang pag-ikot ay kinuha ang servo SG-90. Kinakailangan na maingat na mag-drill, upang hindi hawakan ang mga panloob na bahagi, isang butas na may diameter na 3.2 mm o pinutol lamang gamit ang isang headset na headset.

Naglagay kami ng isang bolt sa butas na ginawa, at mga sulok sa kahabaan ng mga gilid at ayusin kasama ang mga mani:

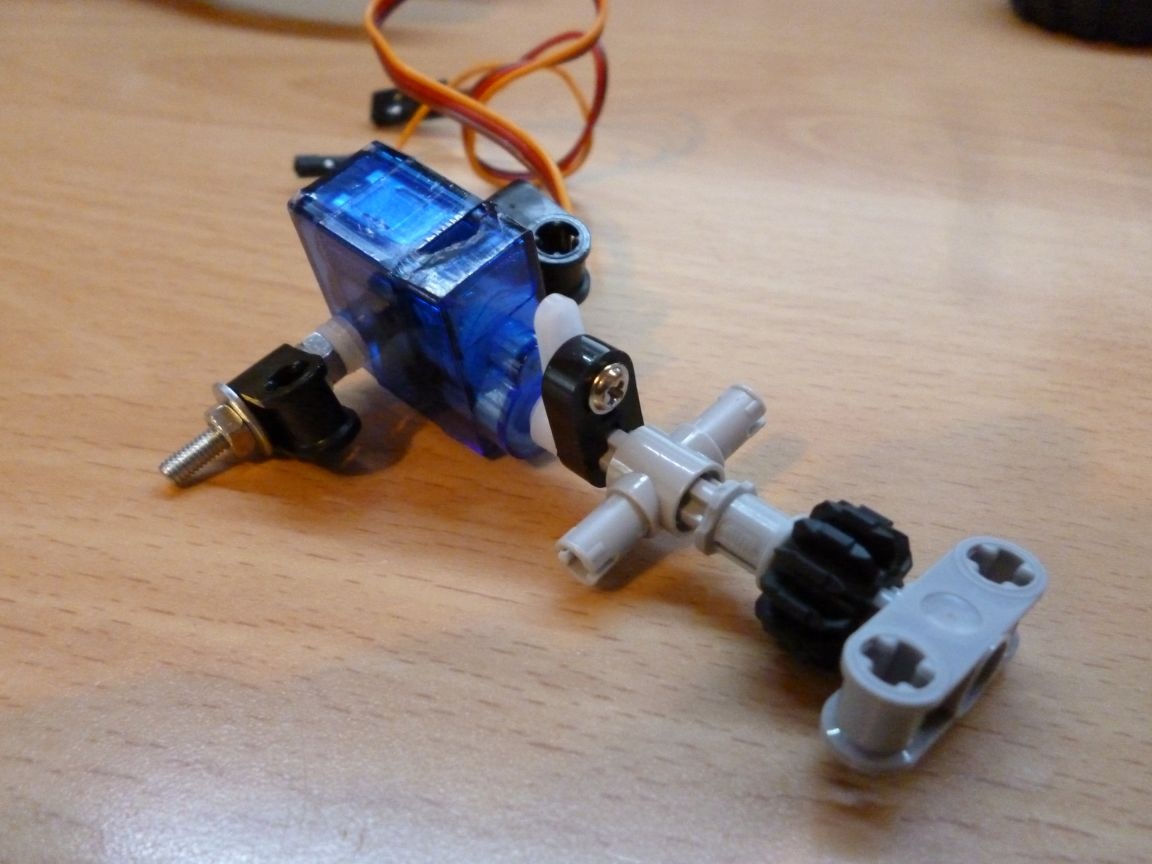
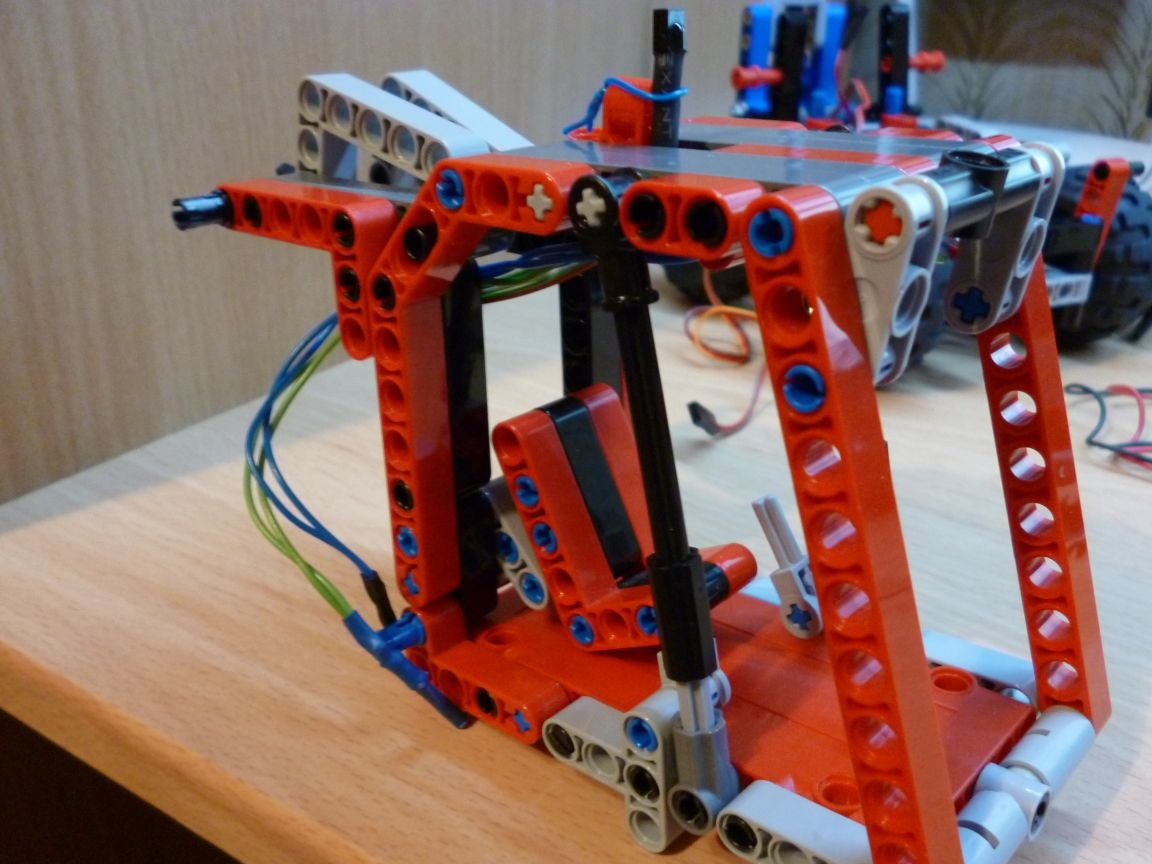
Sa servo shaft ay inilalagay namin sa isang pingga na may naka-screw na bahagi mula sa lego:
At sa wakas ang swivel assembly:
Nakasuot kami ng tsasis:

Ilagay ang mga gulong:
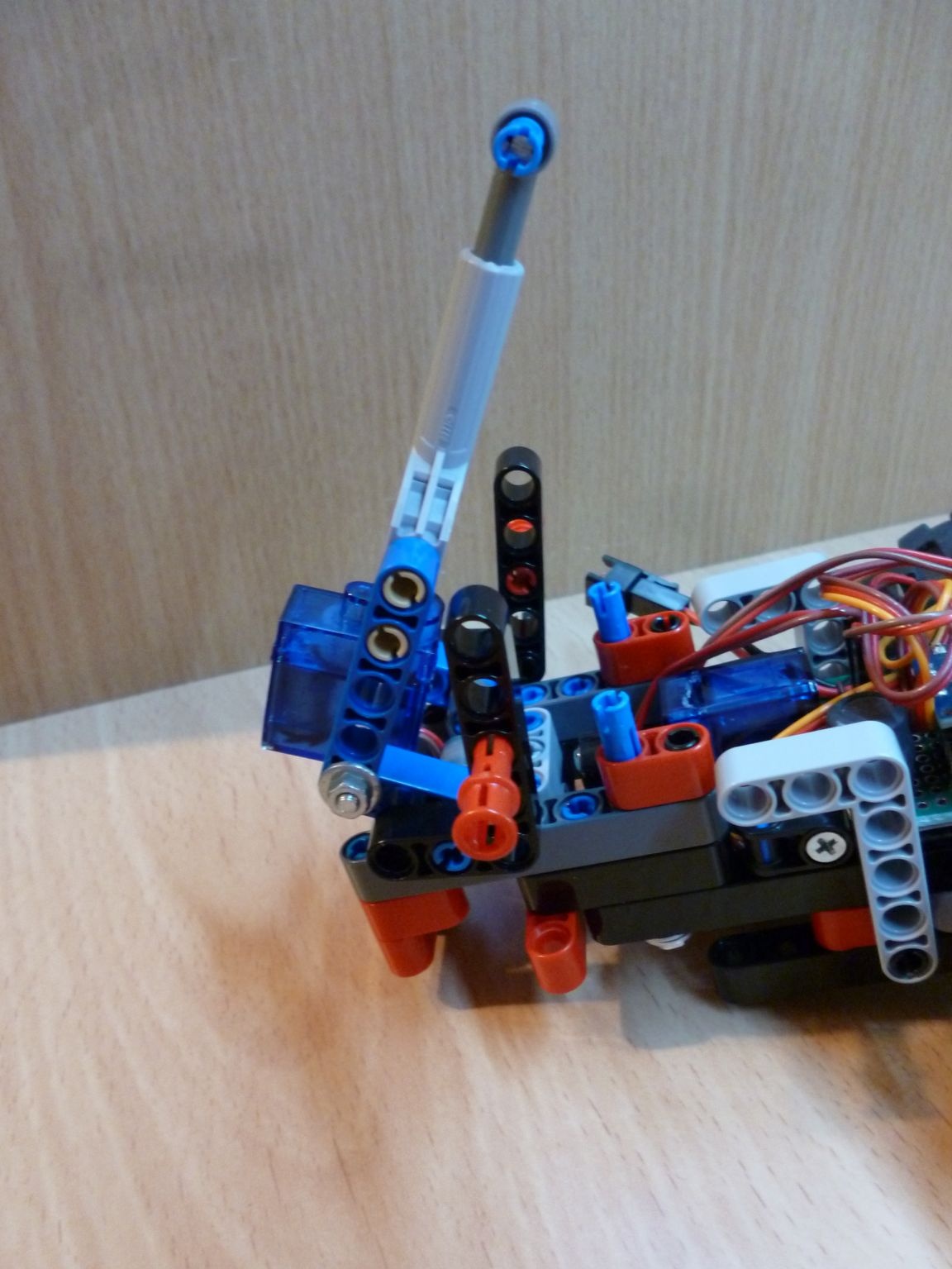
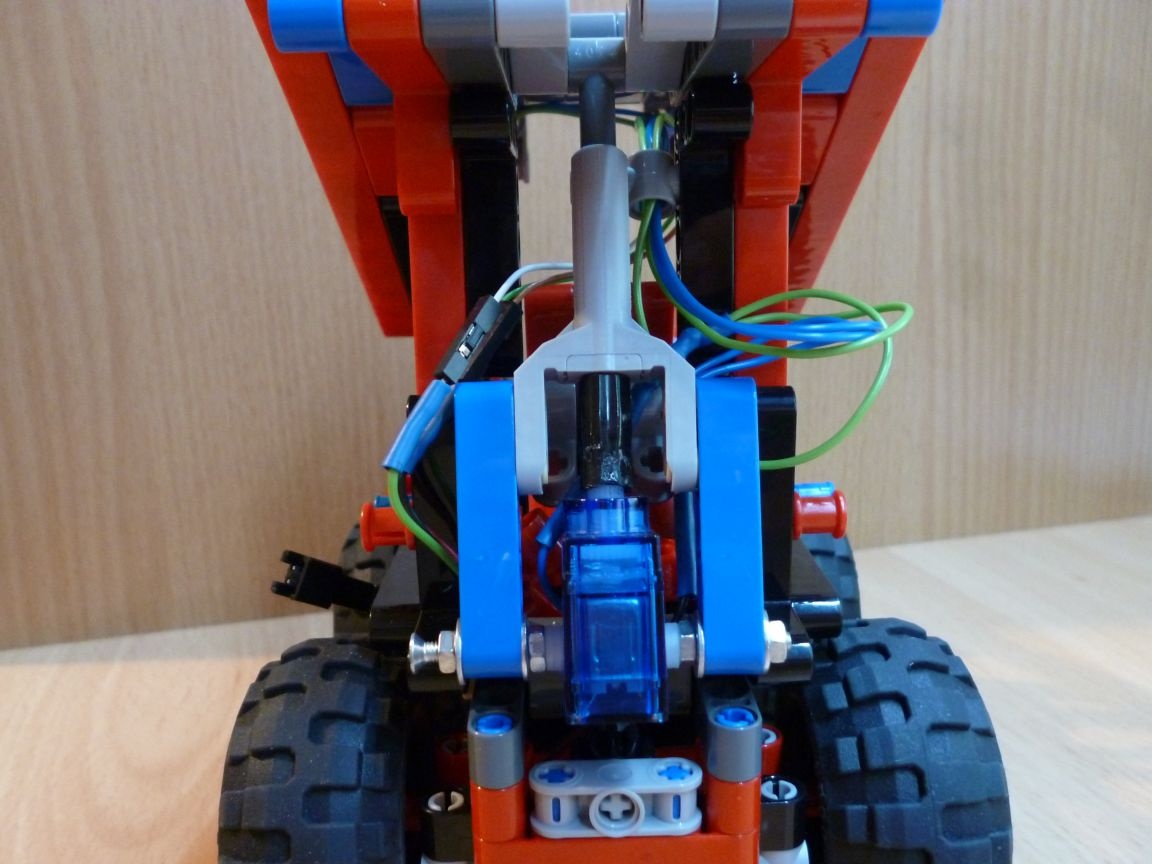
Hakbang 3 pag-aangat ng gear.
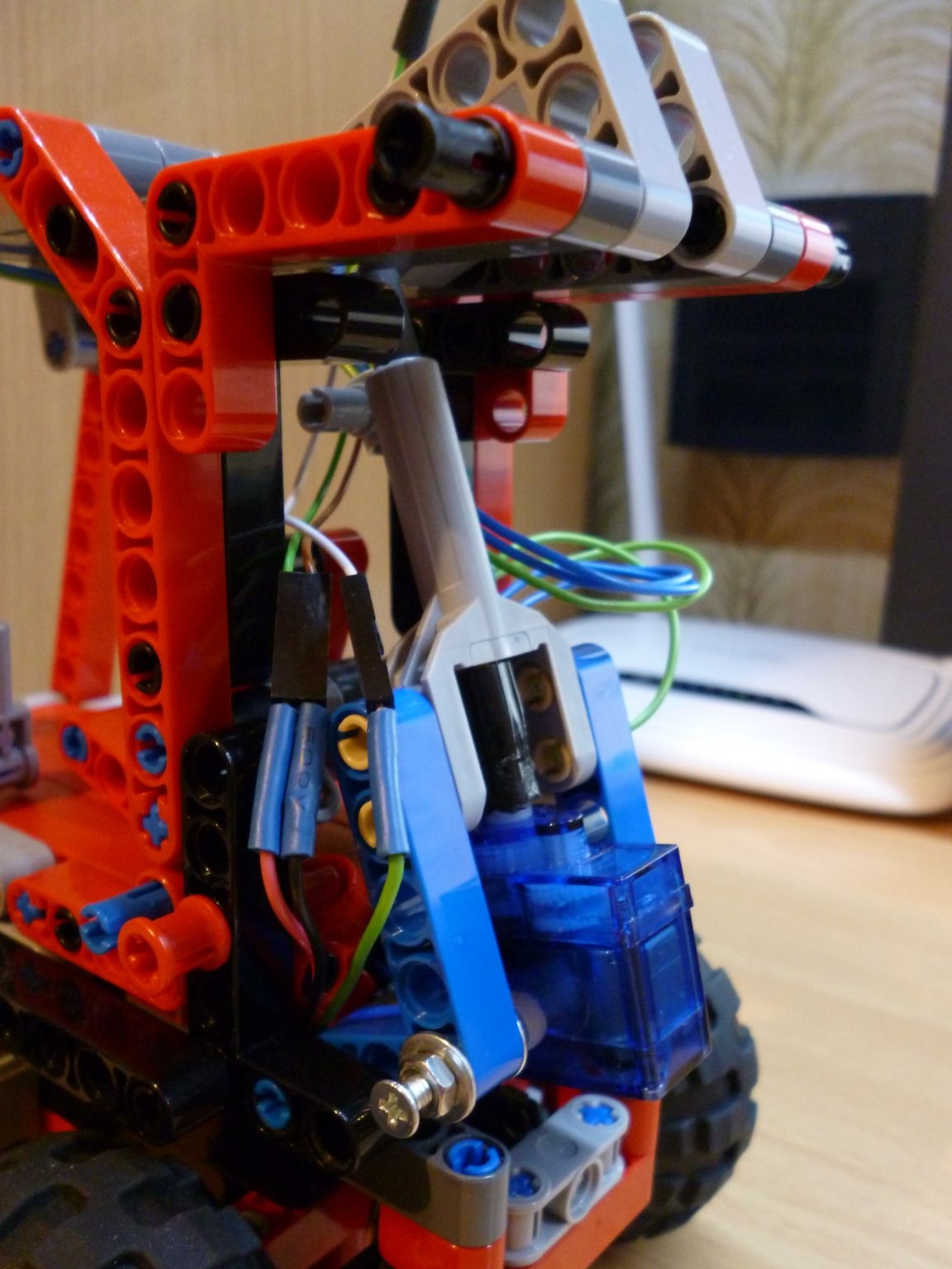
Upang maiangat ang balde ay kumuha ng isang binagong servo SG-90. Ang buong punto ng pagbabago nito ay upang alisin ang panloob na controller at panghinang ng mga wire nang direkta sa motor upang makagawa ng isang motor motor sa labas ng servo drive, iyon ay, upang maaari itong ganap na iikot. Pati na rin sa unang servo, kailangan mong gumawa ng isang butas para sa pag-mount:
Mag-install sa tsasis:
Hakbang 4 taksi.
Kinakailangan upang mag-ipon ng taksi mula sa tekniko ng lego mula sa mga litrato:

Ang Hakbang 5 ay isang elektrisyan.
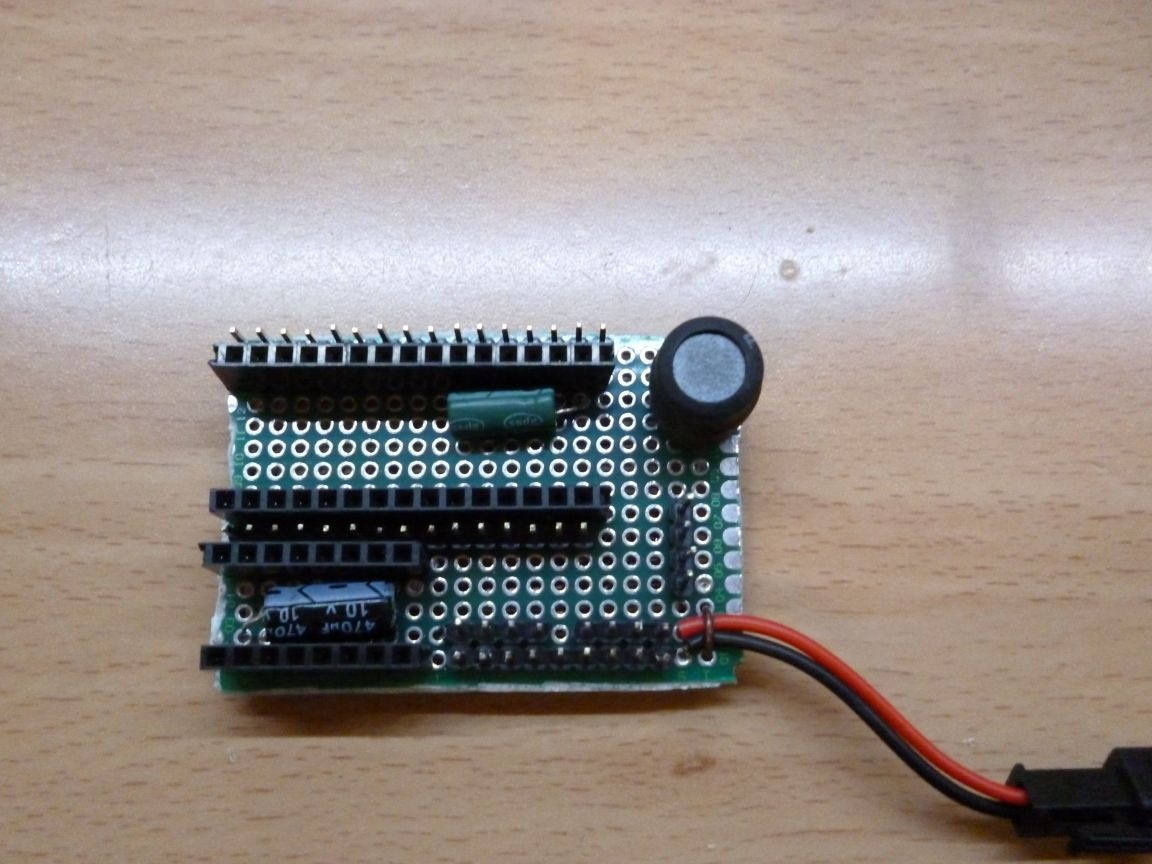
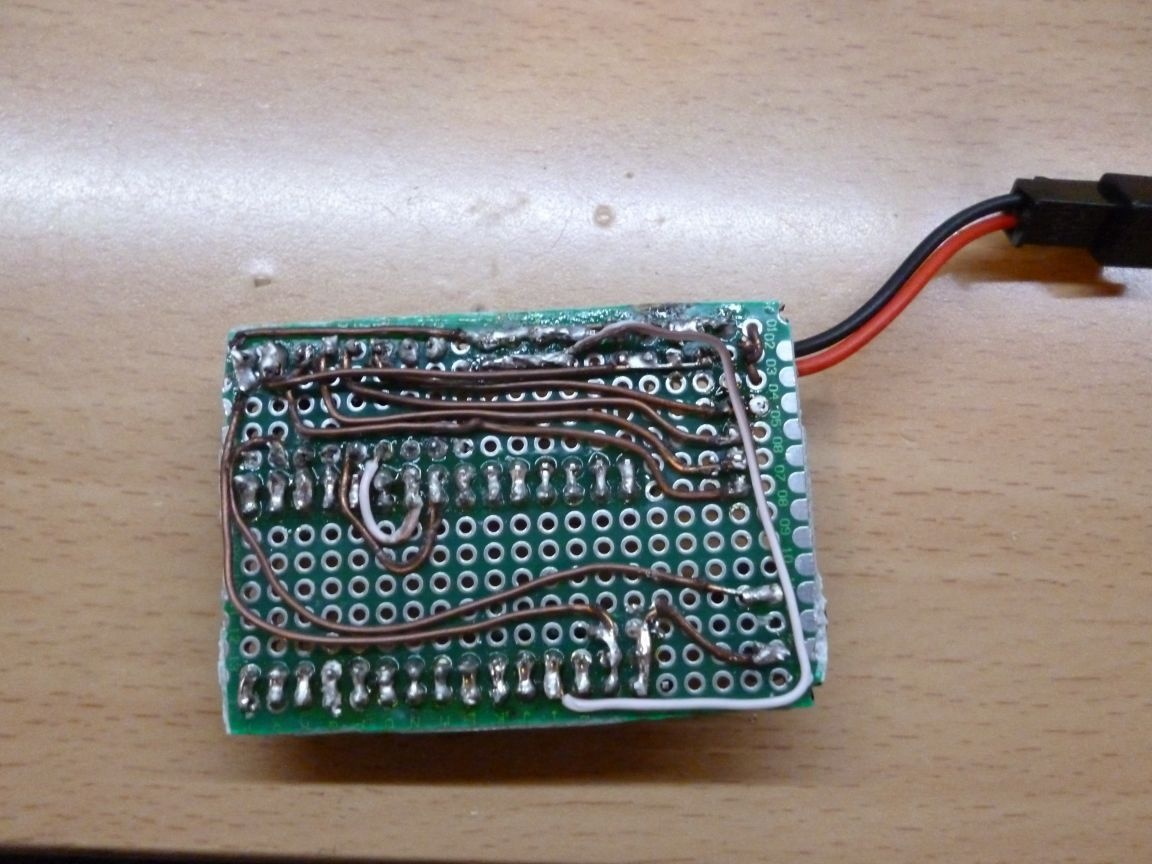
Narito kailangan mong kumuha ng isang paghihinang bakal. Para sa kaginhawaan, kailangan mong ibenta ang lahat sa circuit board ayon sa sumusunod na diagram:
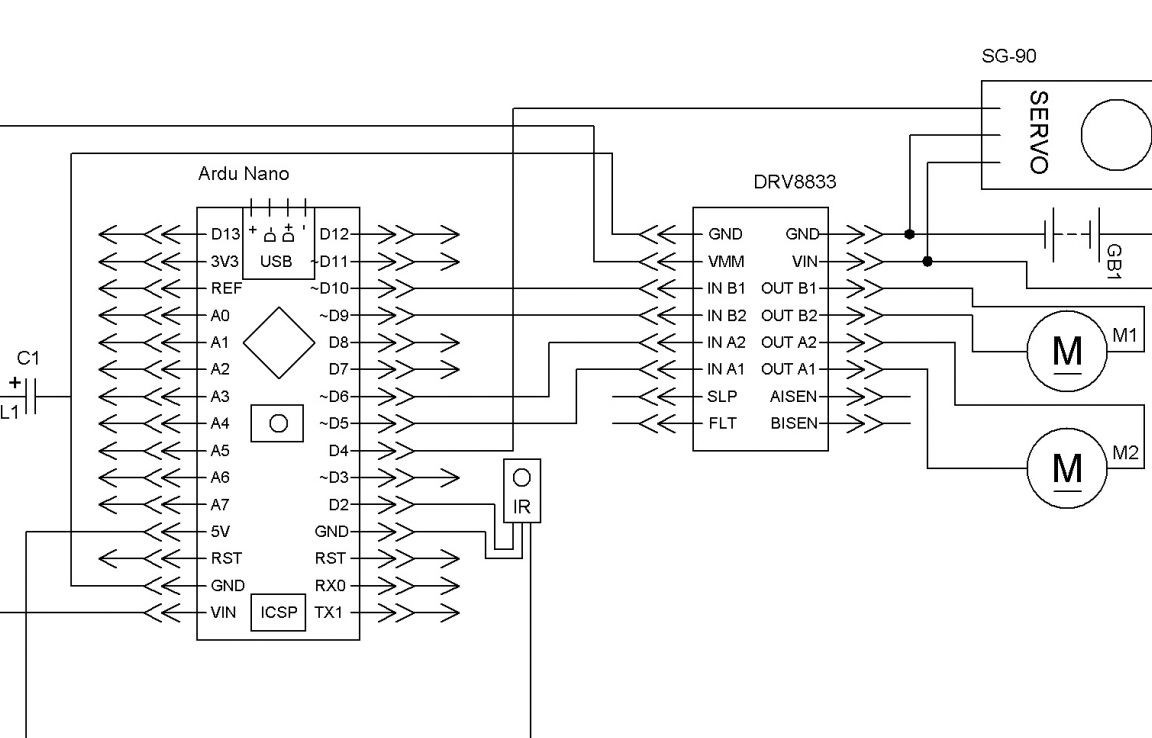
Sa palagay ko ito ay nagkakahalaga ng pagpapaliwanag ng kaunti: maaari kang kumuha ng anumang mababang kapasidad ng kapasidad, maaari ka ring makahanap ng isang inductor ng anumang uri, ito ay kinakailangan upang patatagin ang boltahe ng microcontroller. Ang mga resistor ay kailangang mapili para sa mga LED na ginamit. Kumuha ako ng isang tatanggap ng IR mula sa isang lumang laruan, ngunit maaari mo itong bilhin sa isang tindahan ng radyo. Kung mayroong malakas na pagkagambala, magdagdag ng isang kapasitor sa circuit circuit ng receiver ng IR.
Nakuha ko ito:
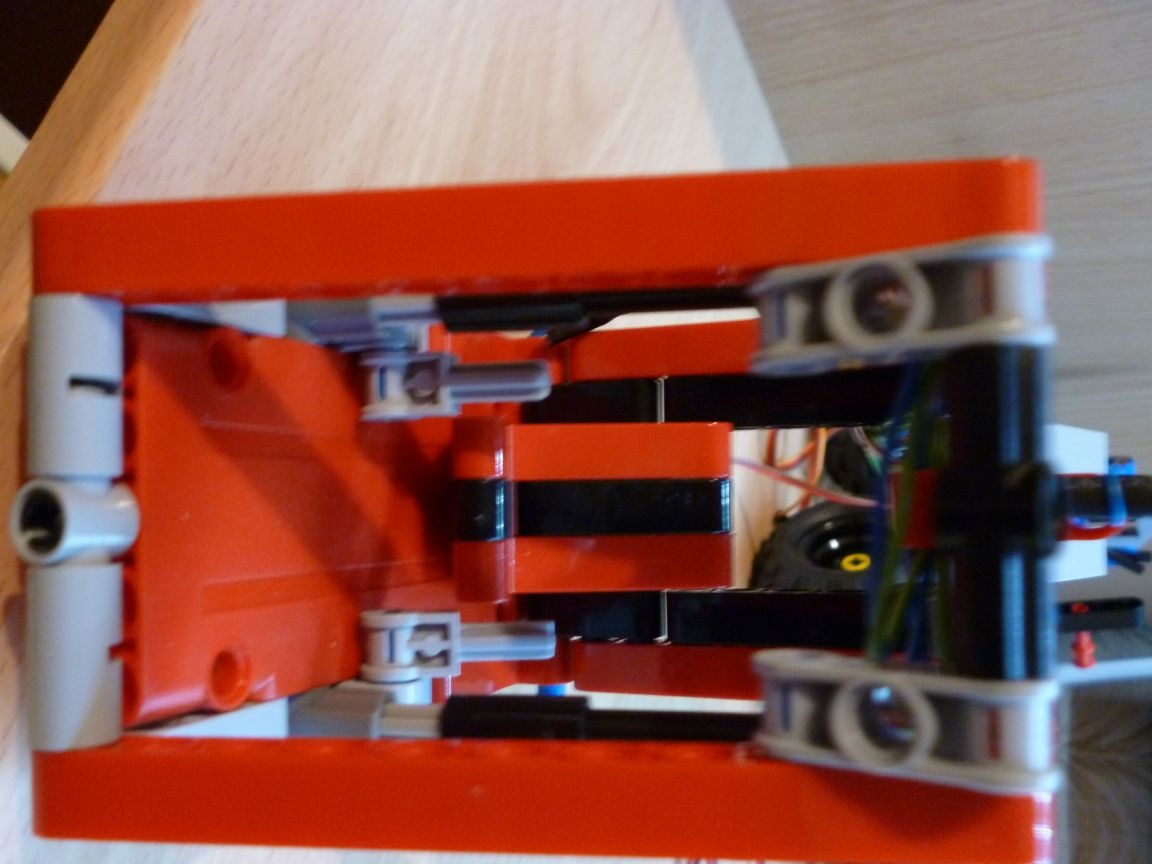
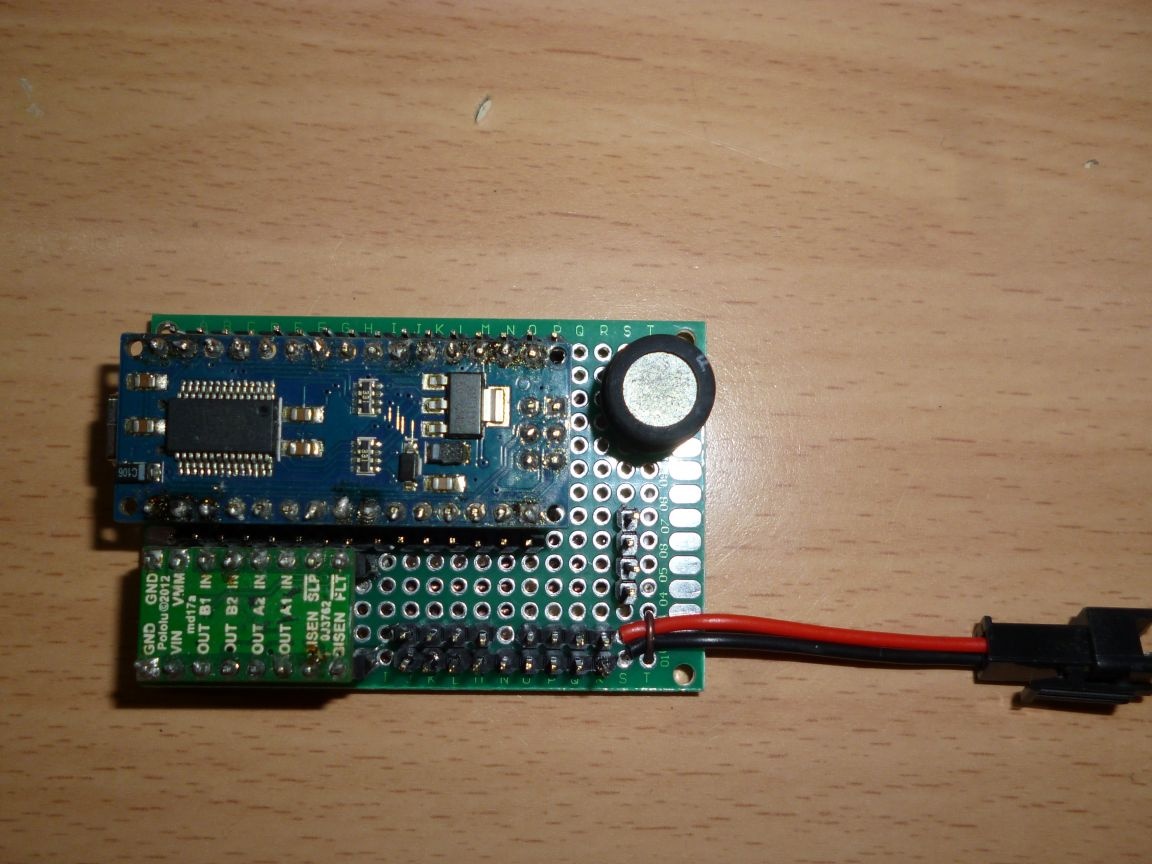
Nag-install kami ng Arduino Nano at DRV 8833 sa kanilang mga lugar:
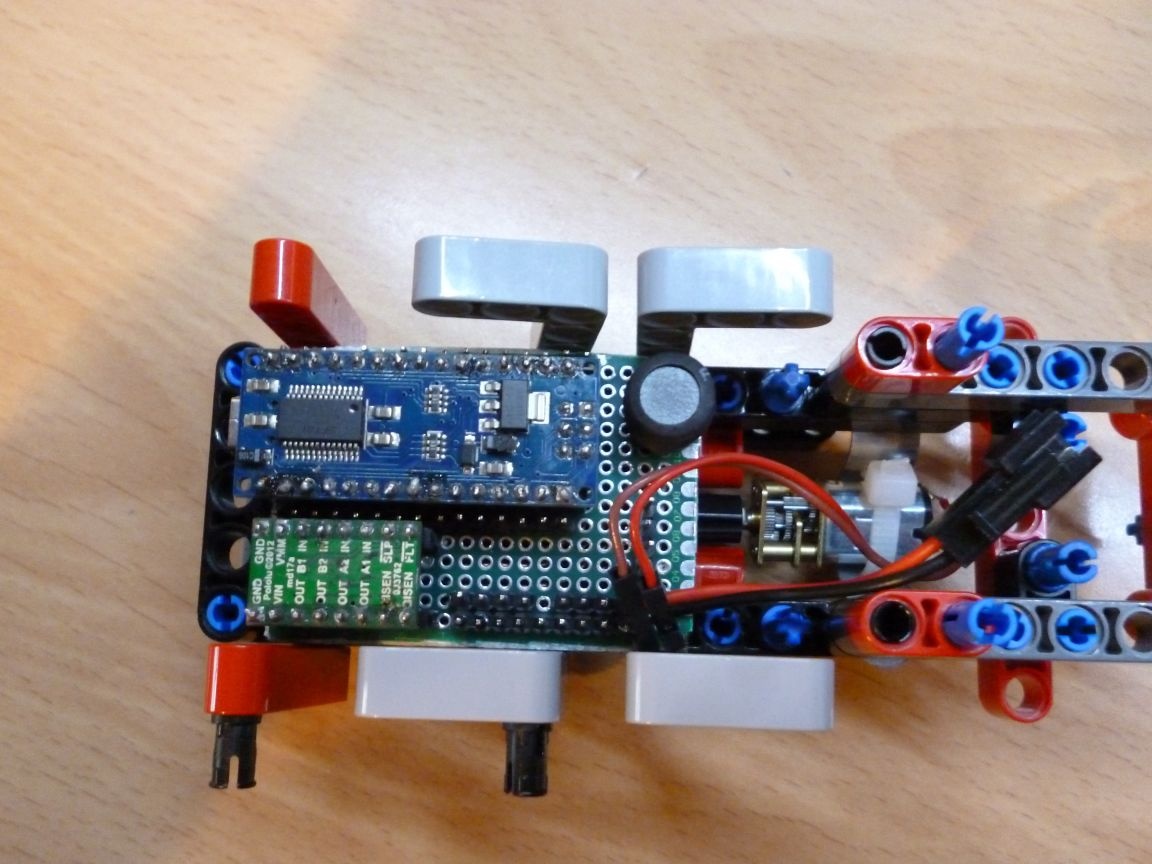
At ngayon inilalagay namin ang board sa tsasis (tinanggal ang mga gulong para sa kaginhawahan):
Para sa kapangyarihan ginamit ko ang 4 na baterya Ni-Mn 1.2v 1000mA na konektado sa serye at sugat na may de-koryenteng tape. Dinikit ko ang mga ito sa double-sided tape sa ilalim ng takip sa taksi.
Pag-install ng Hakbang 6 na taksi.
Ikinonekta namin ang tatanggap ng IR, motor at diode ayon sa diagram, inilalagay ang taksi sa tuktok ng tsasis, ayusin ang balde (maaaring gawin ang anumang balde):

Hakbang 7 firmware.
Ako ay nagprograma sa isang Arduino IDE. Una kailangan mong punan ang aking firmware at sa pamamagitan ng terminal tingnan ang mga remote control code na iyong gagamitin. Maaari kang kumuha ng anumang IR remote control, halimbawa, mula sa isang TV o DVD player. Sa pamamagitan ng pag-click sa isang pindutan sa terminal makikita natin ang code ng pinindot na pindutan, isulat ito sa isang piraso ng papel. Ginagawa namin ito sa lahat ng mga pindutan kung saan nais naming i-program ang mga pagkilos ng loader. Susunod, i-edit ang sketch. Isinulat namin ang mga code na naitala namin para sa mga kinakailangang aksyon sa loob nito at muling pinaputok muli.
Firmware
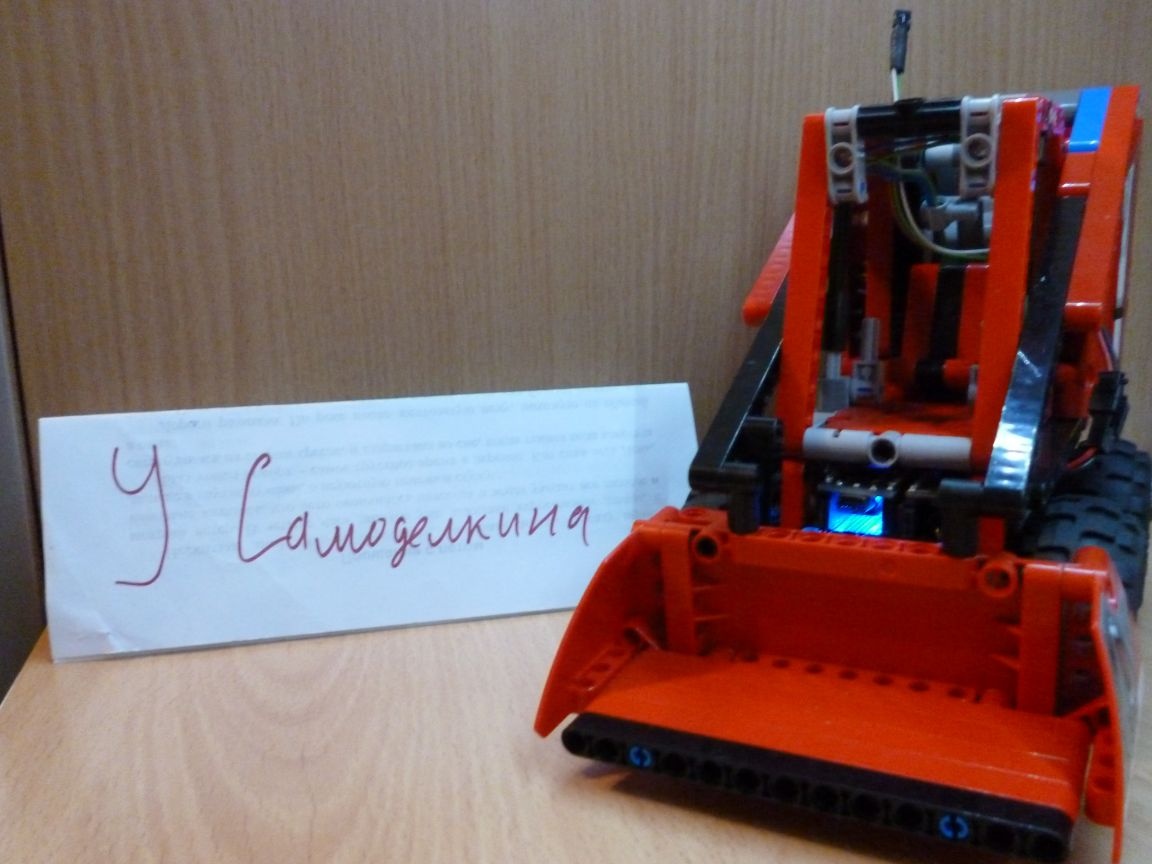
Video ng Loader: