




Marami ang nakarinig o nakakita ng mga matalinong tainga ng "necomimi". Ang ganitong mga tainga ay tumutugon sa kalooban ng may-ari at, depende sa ito, ay tumugon. Ang prinsipyo ng pagpapatakbo ng naturang aparato ay batay sa pag-decode ng aktibidad ng utak ng tao. Ang nasabing aparato ay nagkakahalaga ng mga 6000 tr.
Nagpasya ang wizard na gumawa ng isang katulad na aparato. Totoo, ang nasabing mga tainga ng pusa ay kinokontrol gamit ang isang pindutan, ngunit ang kanilang presyo ay isang order ng mas mataas na kadahilanan. Sa pamamagitan ng paraan, ang mga tainga ay maaaring hindi lamang ng pusa, ngunit mayroon man, kung magkano ang iyong imahinasyon ay sapat.
Panoorin natin ang isang video na may isang halimbawa ng pagpapatakbo ng tulad ng isang aparato.
Upang makagawa ng nasabing animated na tainga, kailangan ng master ang sumusunod
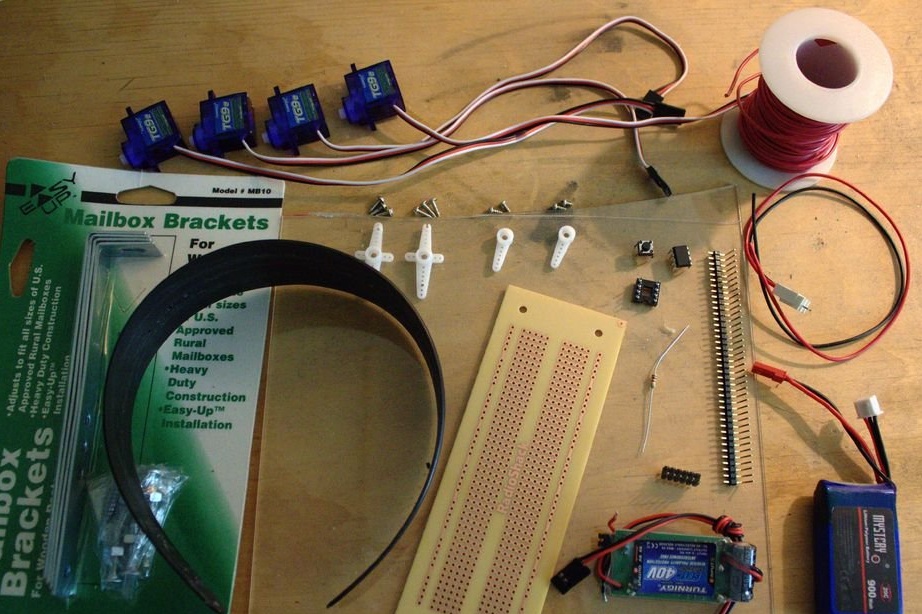
Mga tool at materyales:
-Glue gun;
-Dremel;
-Ang distornilyador;
-USB-programmer para sa AVR;
-Mga gamit;
-Mga accessory;
Microcontroller ATTiny13;
- Servo-4 na mga PC .;
-Wire;
-Tindi ng;
- Resistor 1 kOhm;
-Lithium polimer baterya 800 mAh;
-Pagkaloob ng lakas;
-Plastic bezel;
-Ang itim ay, puti;
-Acryl;
-Glue;
-Sewing machine;
-Azolenta;
-Wastong papel;
-Paper;
- gunting;
-Tread;






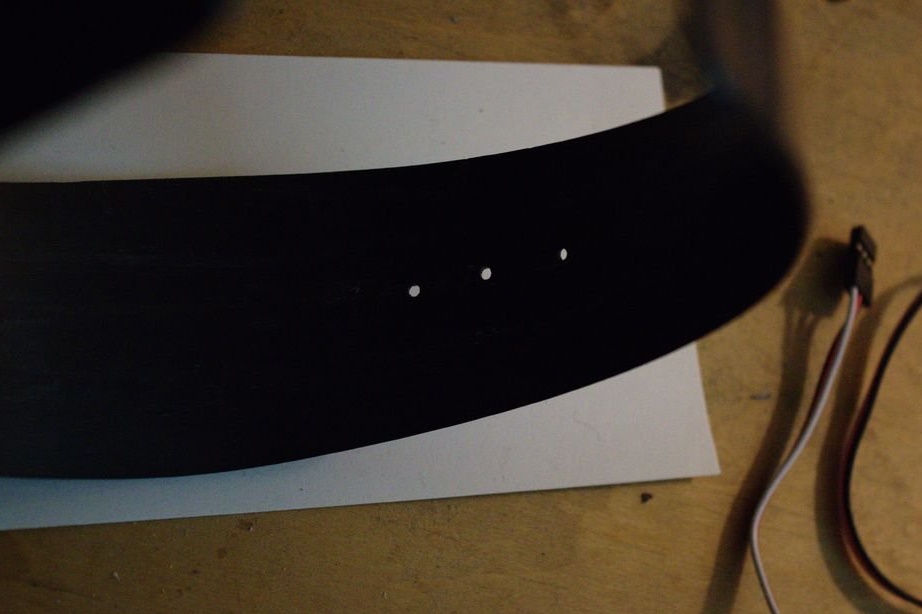
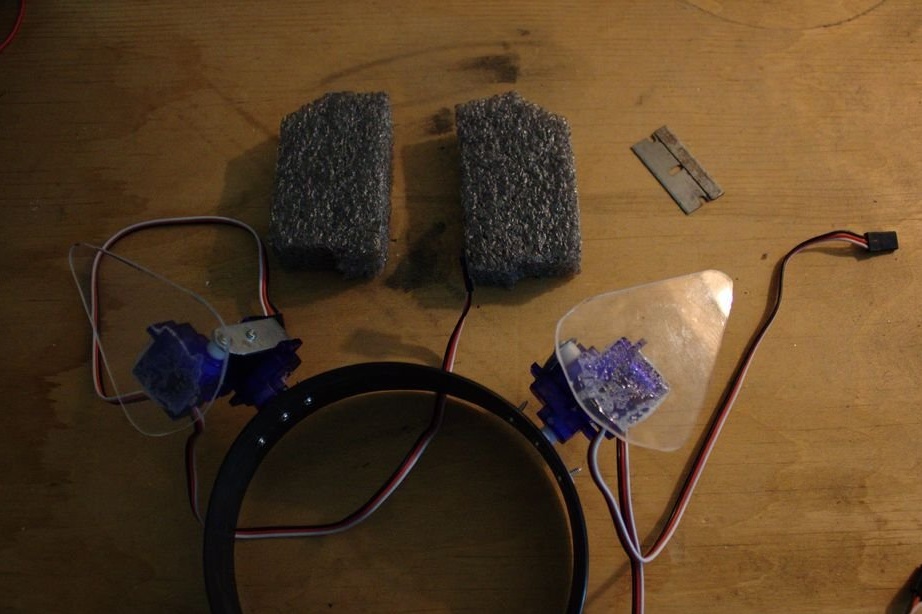
Hakbang Una: Si Bezel
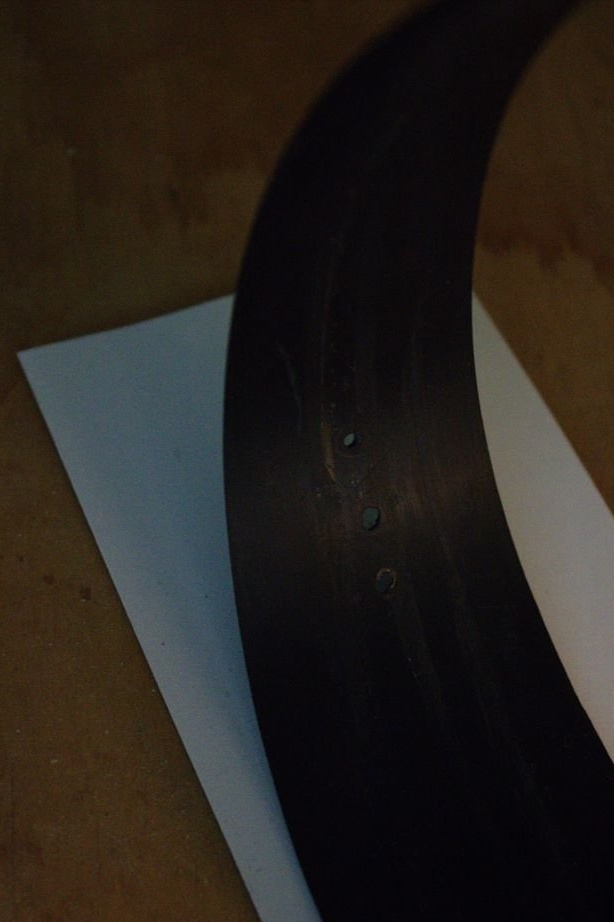
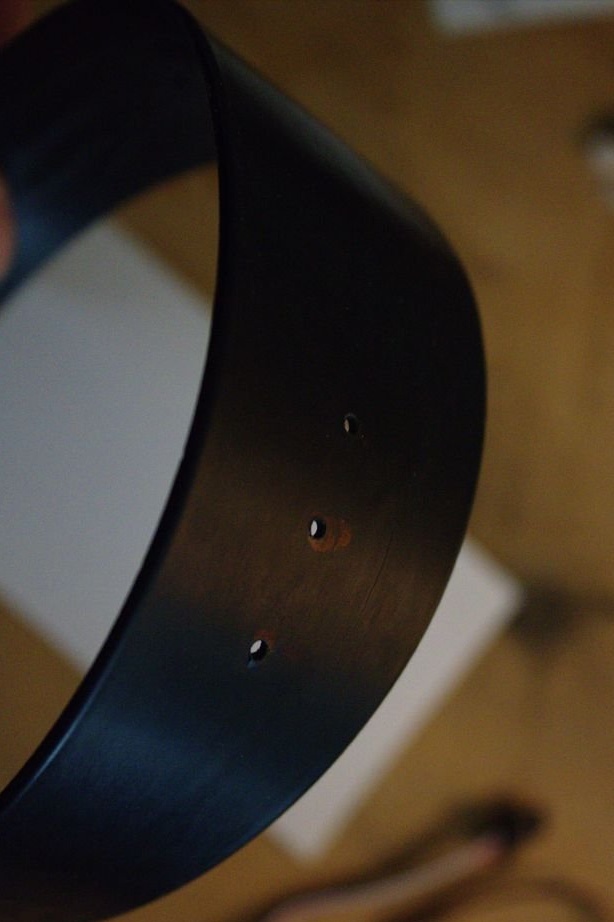
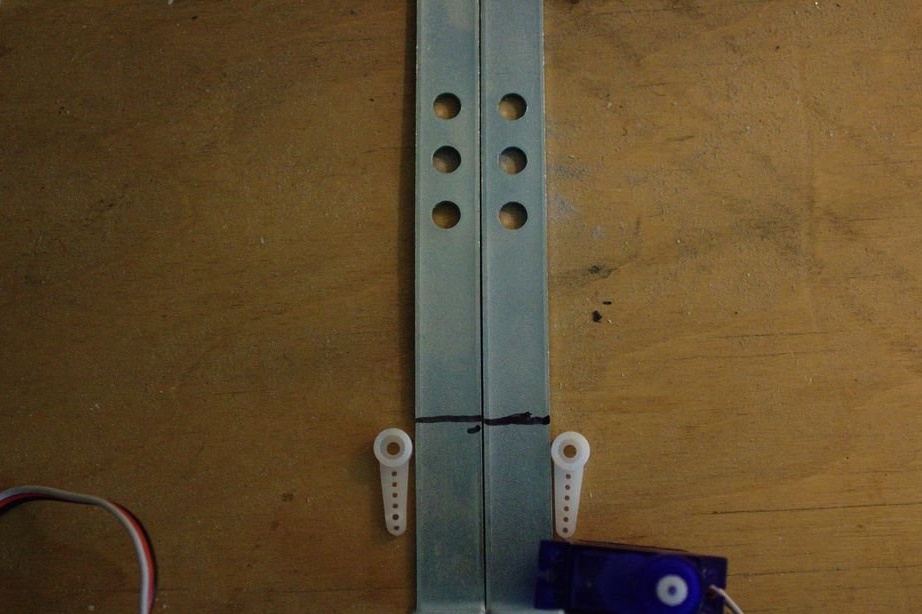
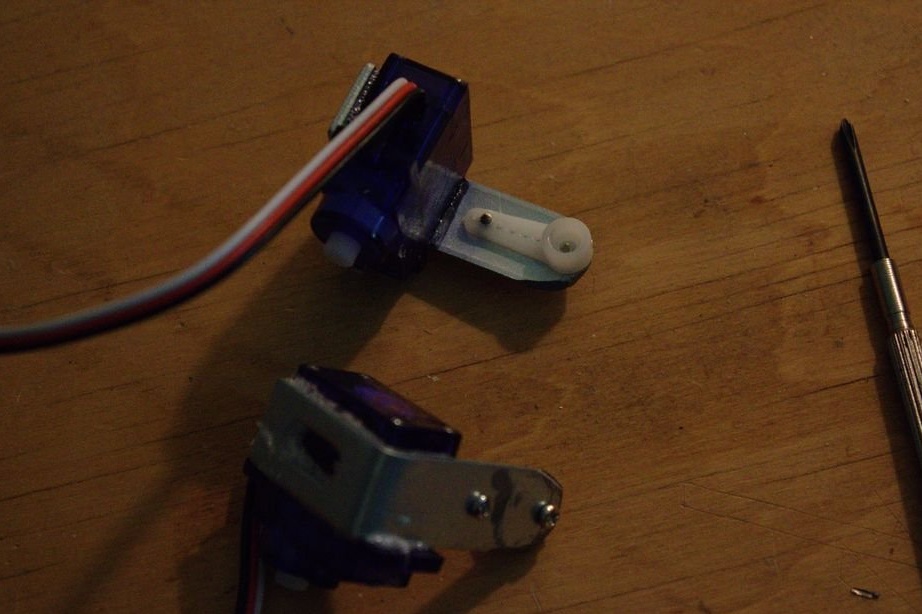
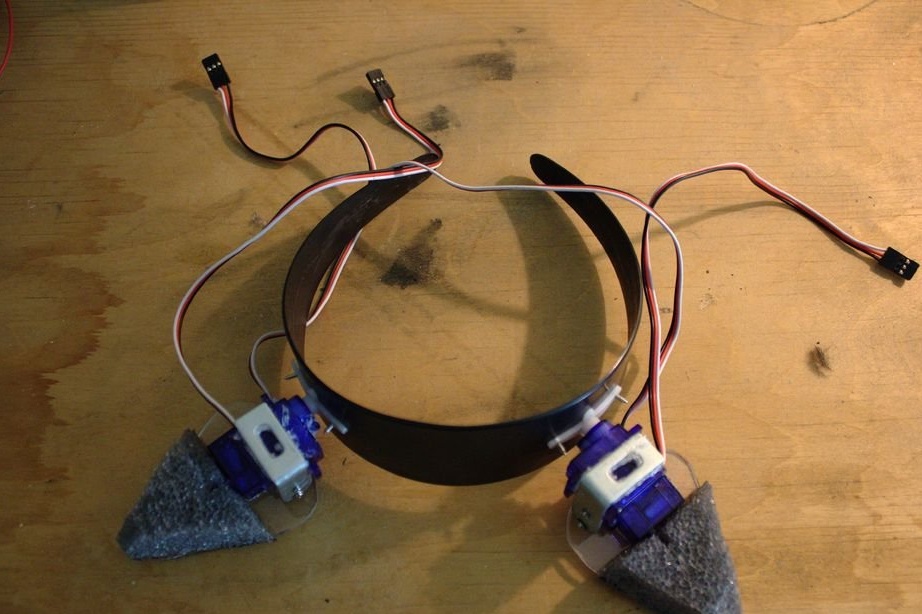
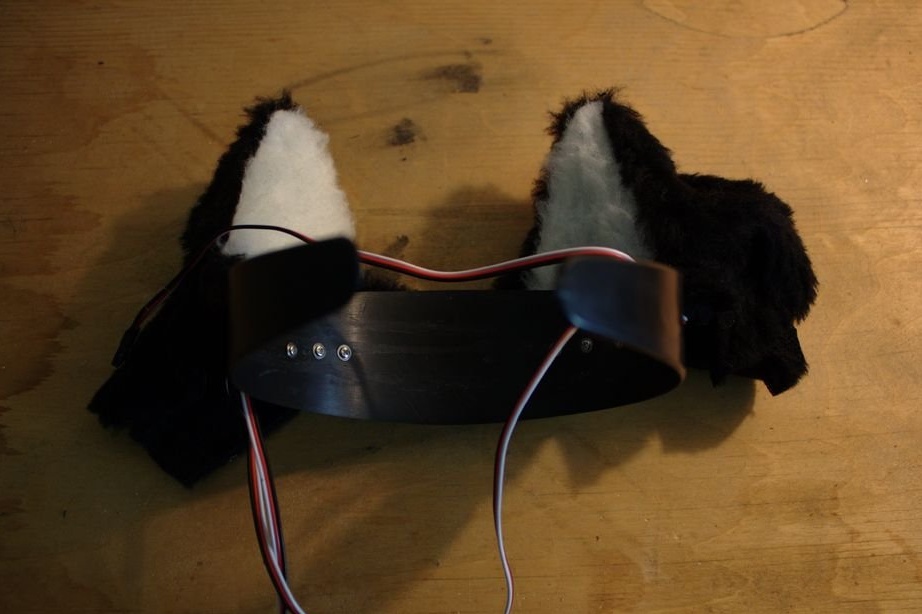
Para sa base, kinuha ng master ang hair band. Ang bezel ay dapat na mahigpit na sapat. Una, minarkahan ng wizard ang mga lokasyon ng pag-install ng mga servo. Apat lamang ang mga servo. Ang dalawa ay may pananagutan sa paglipat ng kaliwa / kanan at nakadikit nang direkta sa rim, dalawa ang may pananagutan sa paglipat pataas / pababa at nakakabit sa unang servo. Ang mga unang servo ay naka-mount sa rim gamit ang mounting plate na may axis pababa, i.e. lilipat ang servo, hindi ang ehe. Nag-install ang master ng isang mounting plate sa servo drive at minarkahan ang tatlong butas sa bawat panig sa rim.
Susunod, kailangan mong ayusin ang servo upang matiyak na ang katawan nito ay hindi mahuli ang rim sa panahon ng pag-ikot.

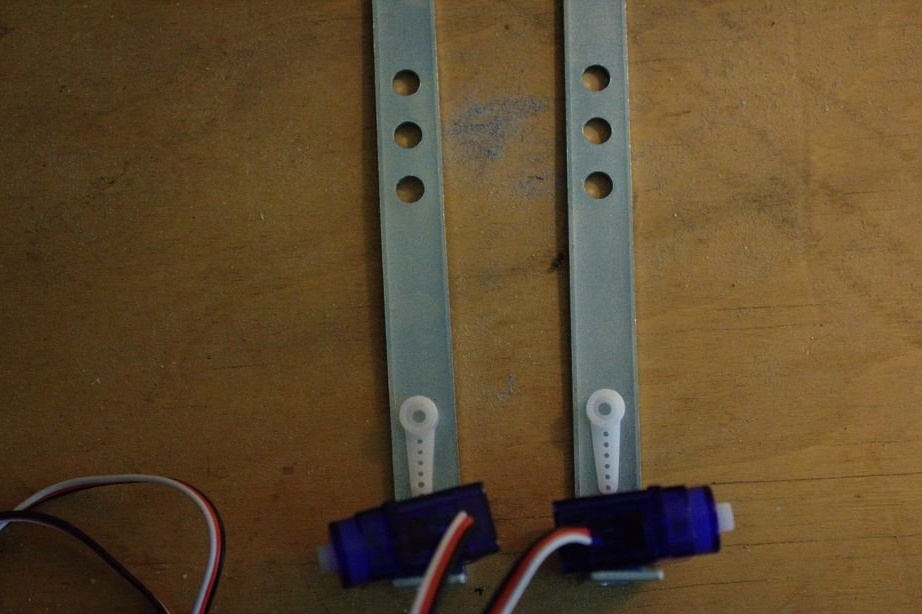
Hakbang Dalawang: Mount
Ngayon kailangan mong gumawa ng isang bundok para sa pangalawang servo. Gumagawa ang kanyang panginoon mula sa mounting bracket. Mga marka at pinuputol ang nais na haba. Mag-drill hole. Glues sulok sa drive.






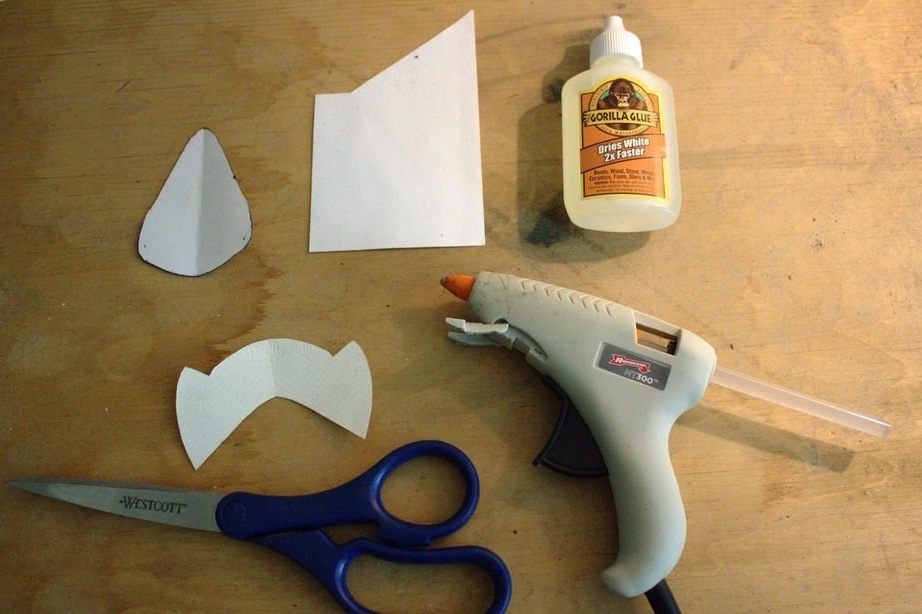
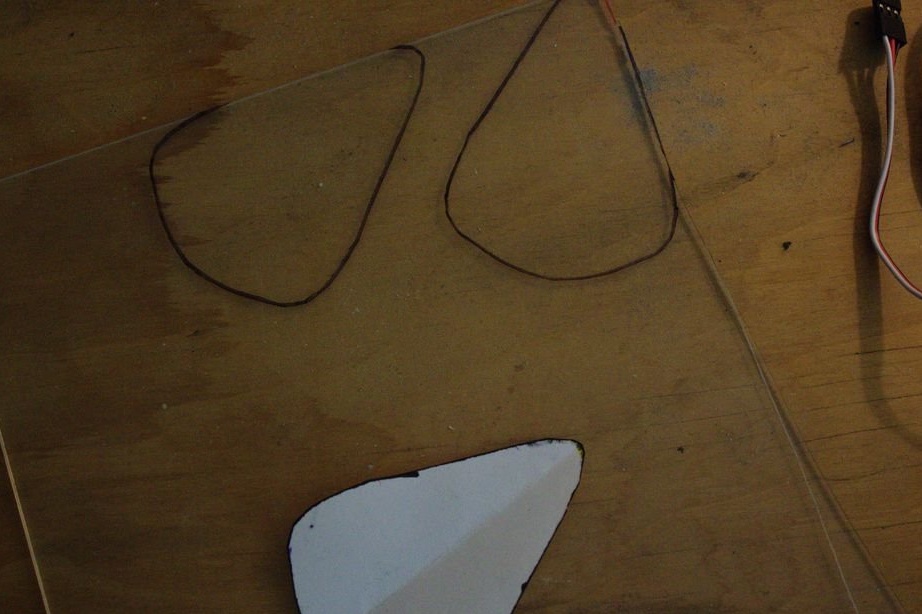
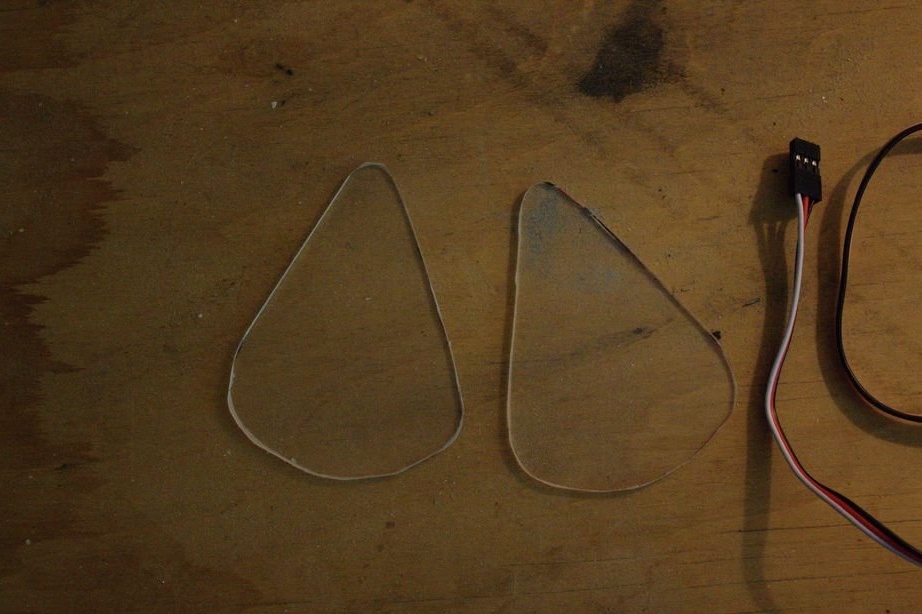
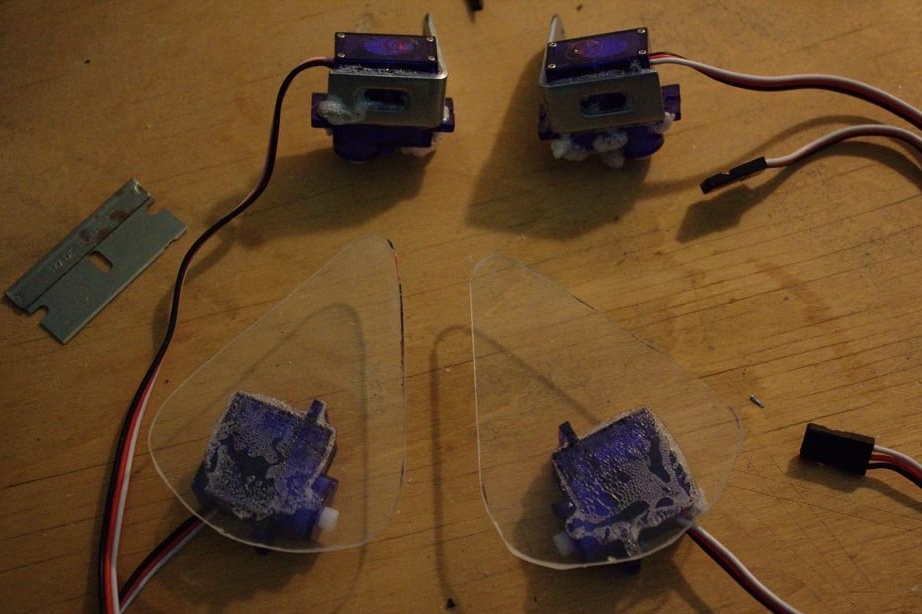
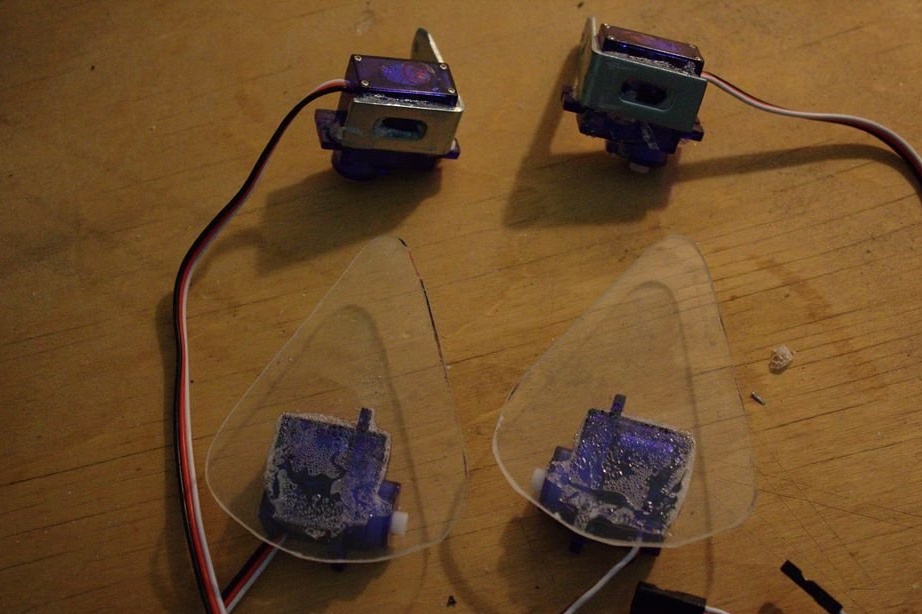
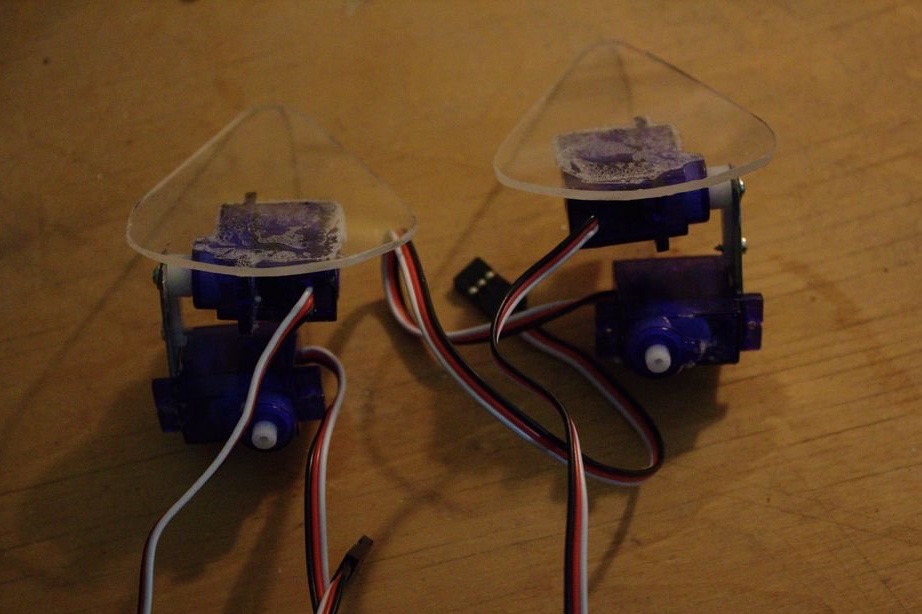
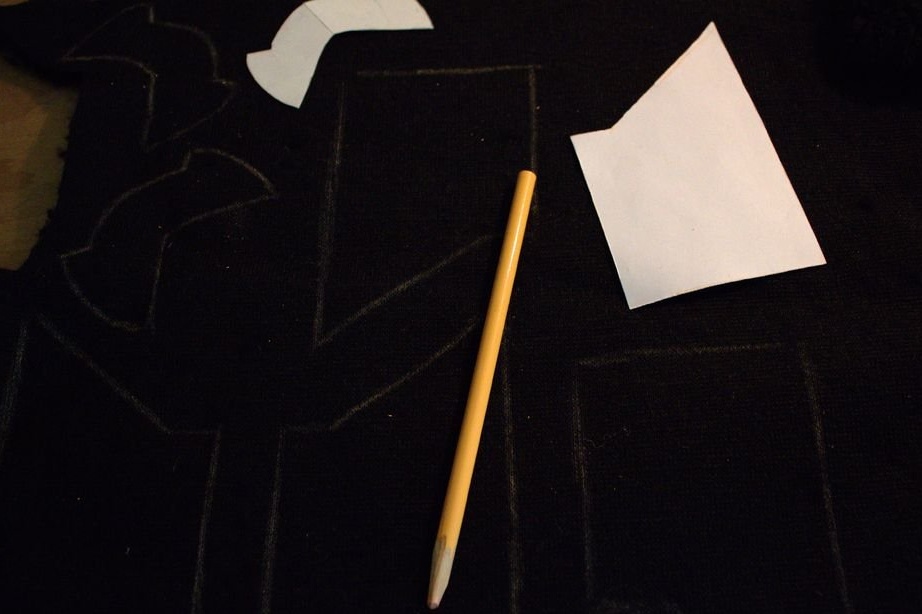
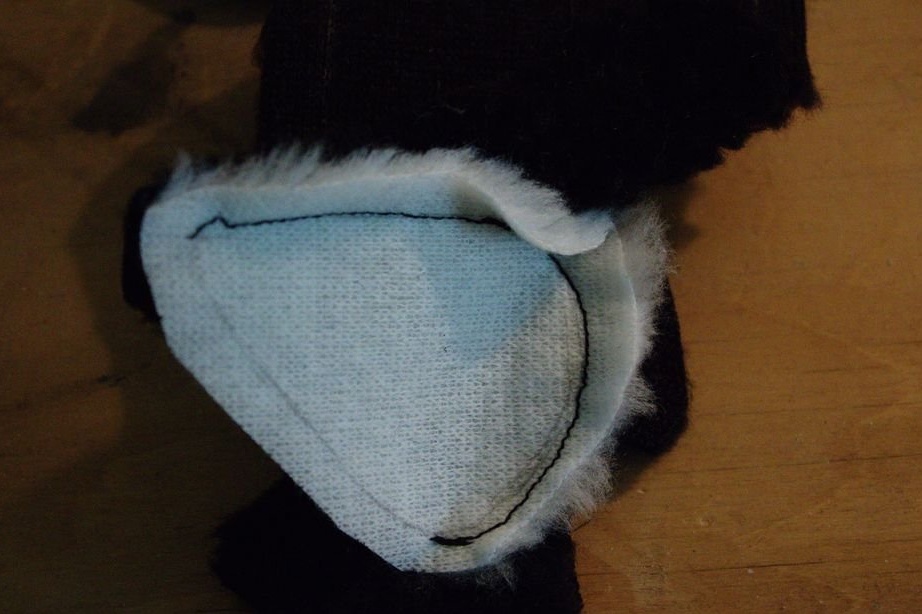
Hakbang Tatlong: Ears Base
Cuts out isang template ng papel. Ayon sa pattern, pinuputol nito ang base ng mga tainga mula sa acrylic.Kinukuha ang base sa pangalawang servo (pataas / pababa). Kapag isinasagawa ang operasyon na ito, dapat mong tiyakin na ang mga base ay hindi hawakan ang iba pang mga bahagi ng aparato at pagkatapos ay ilagay lamang ang mga ito.


Hakbang Apat: Pag-install
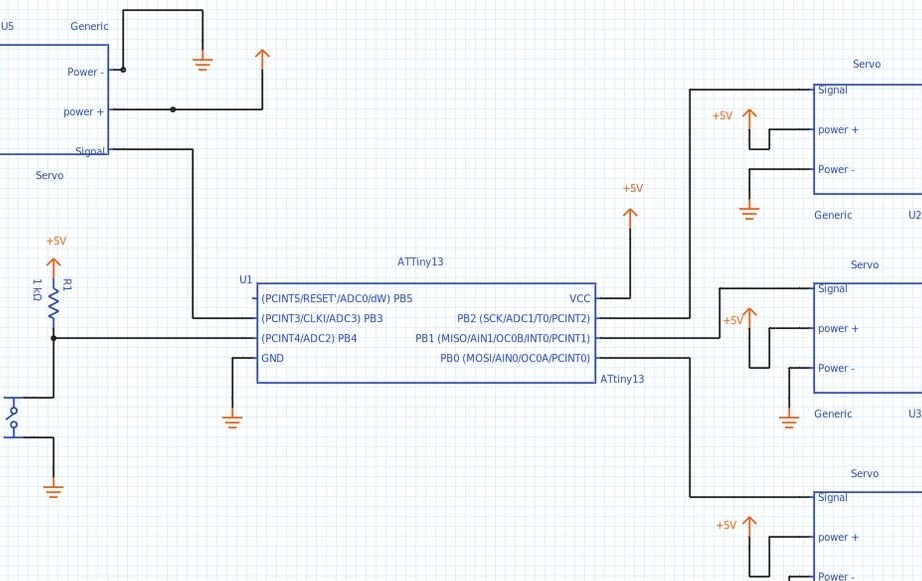
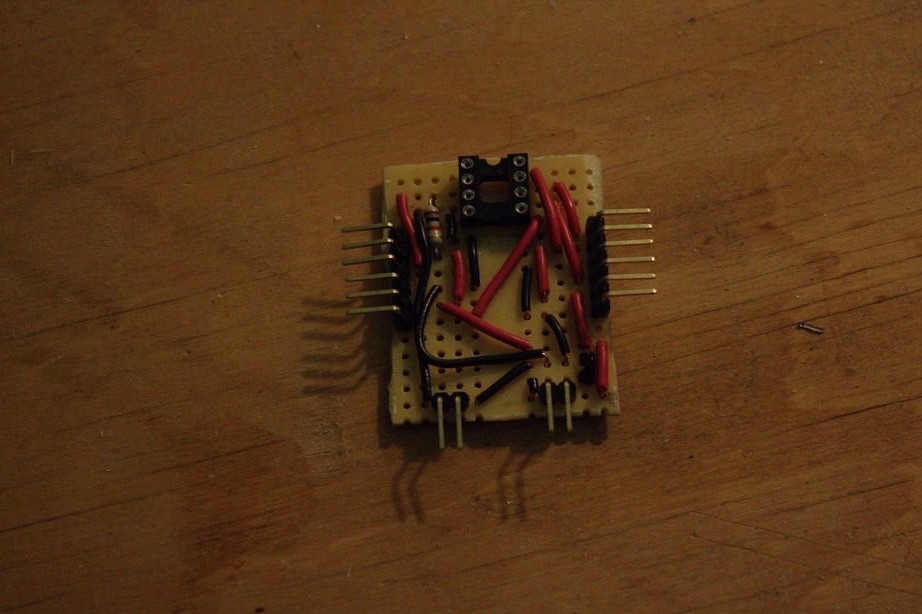
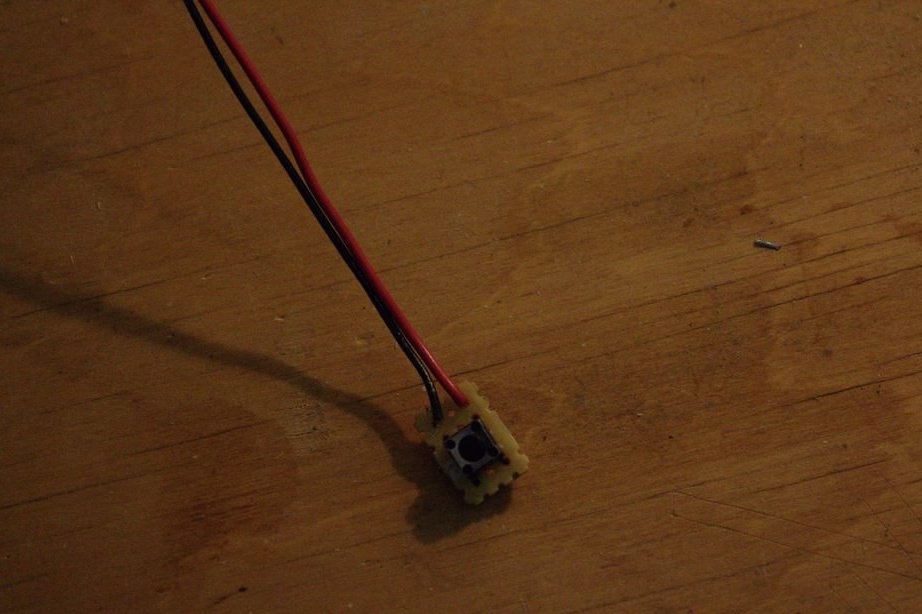
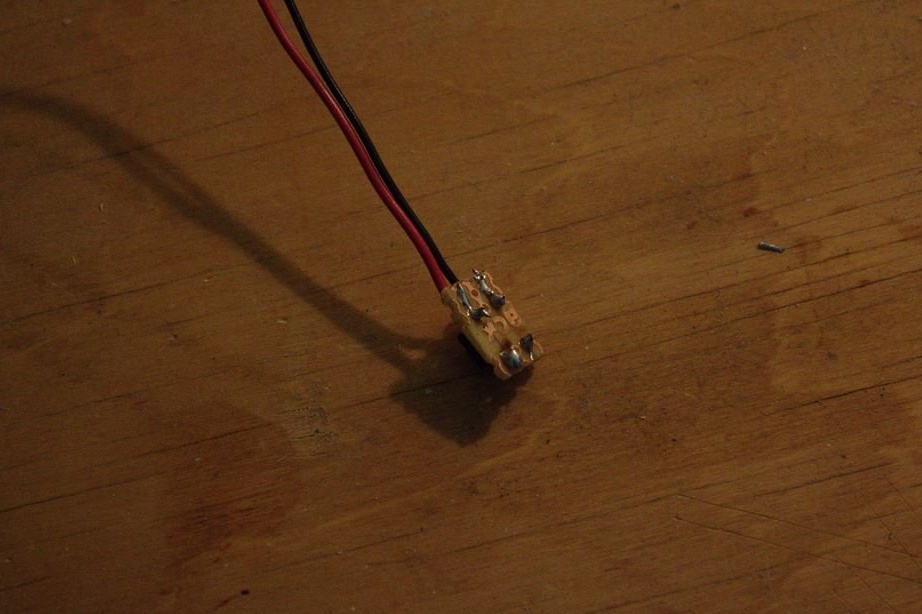
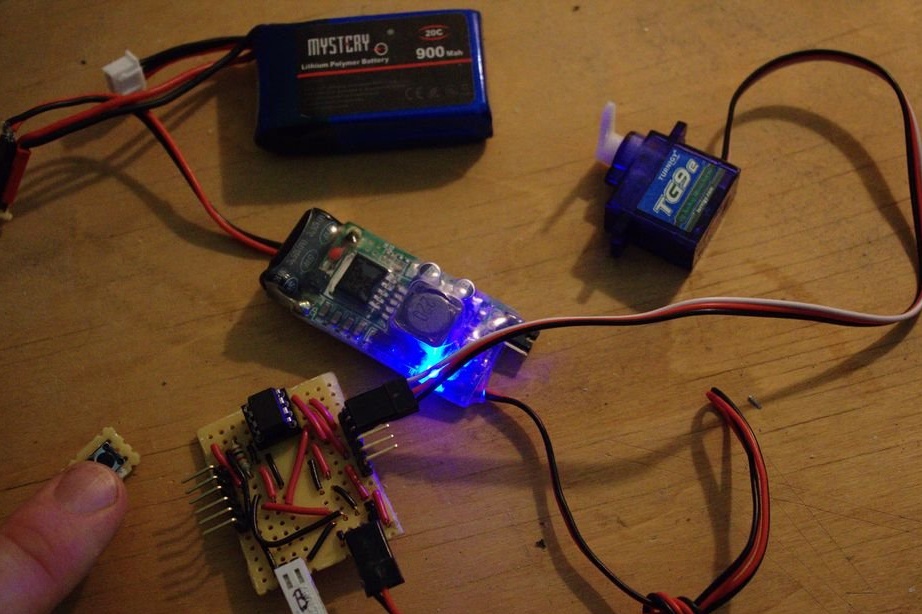
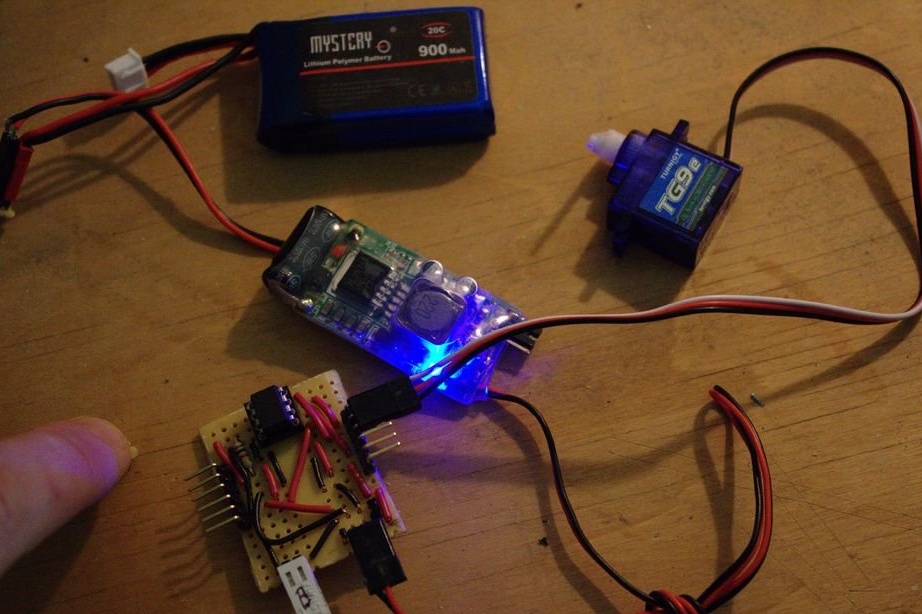
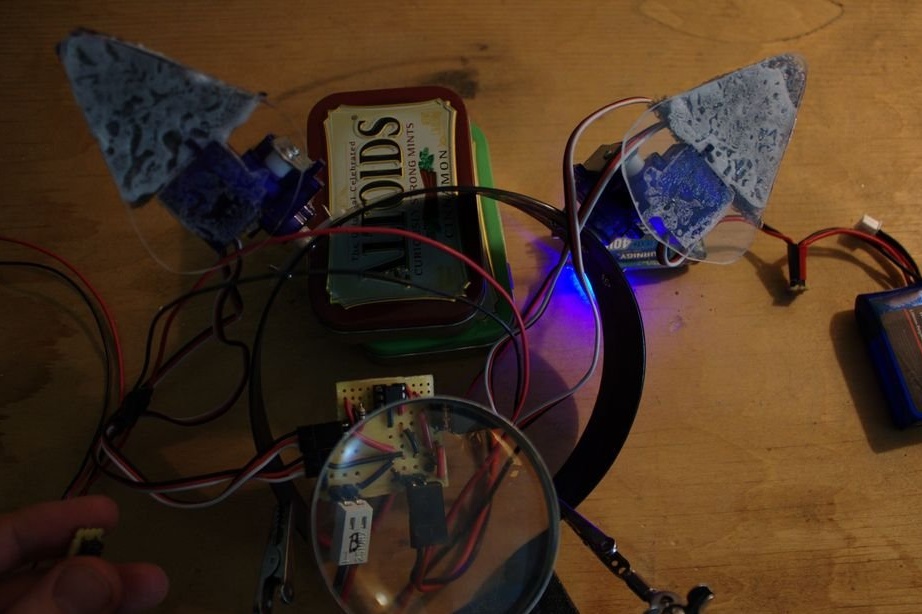
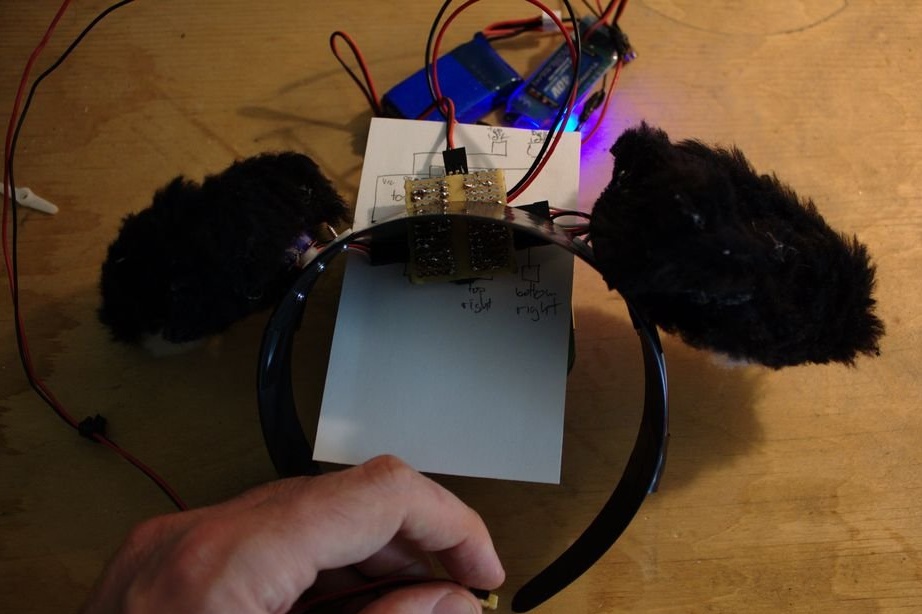
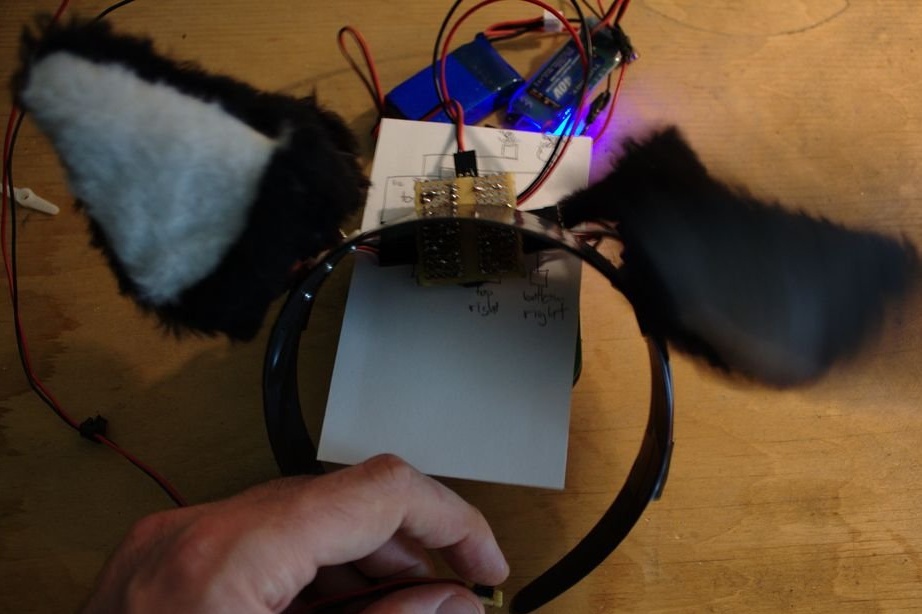
Nagsasagawa ng pag-install ayon sa pamamaraan. Ang microcontroller ay naka-mount sa isang breadboard. Inilalagay din nito ang mga konektor para sa mga aparato ng peripheral, anim sa bawat panig para sa mga drive ng servo, dalawa para sa isang panlabas na pindutan at dalawa para sa kapangyarihan. Ang microswitch ay naka-mount sa isang hiwalay na tinapay. Ang pindutan ay magiging malayo at ang wire ay dapat mahaba.
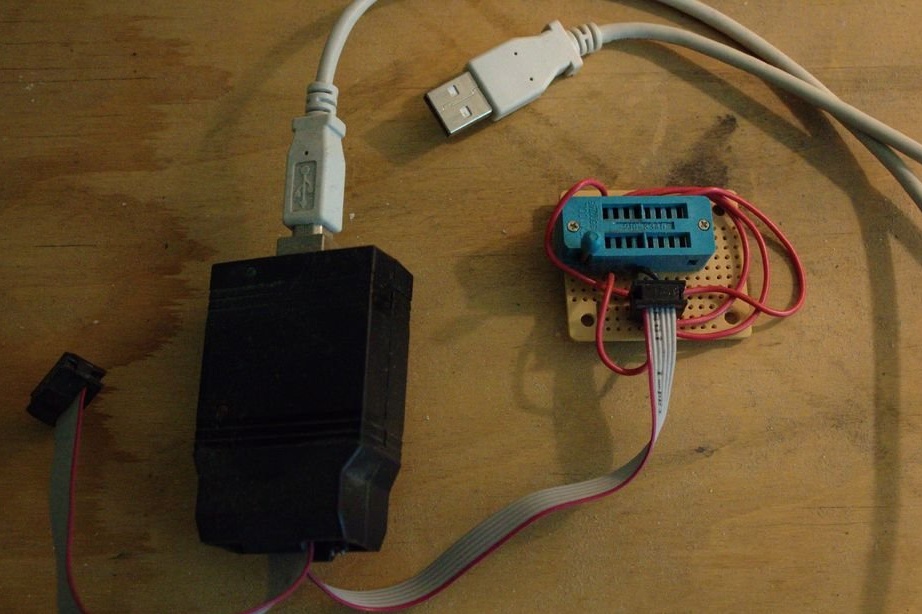
Hakbang Limang: Programming
Ngayon ay maaari mong i-program ang microcontroller. Magagamit ang code sa link na ito. https://github.com/abetusk/kears/blob/release/kears.ihex .
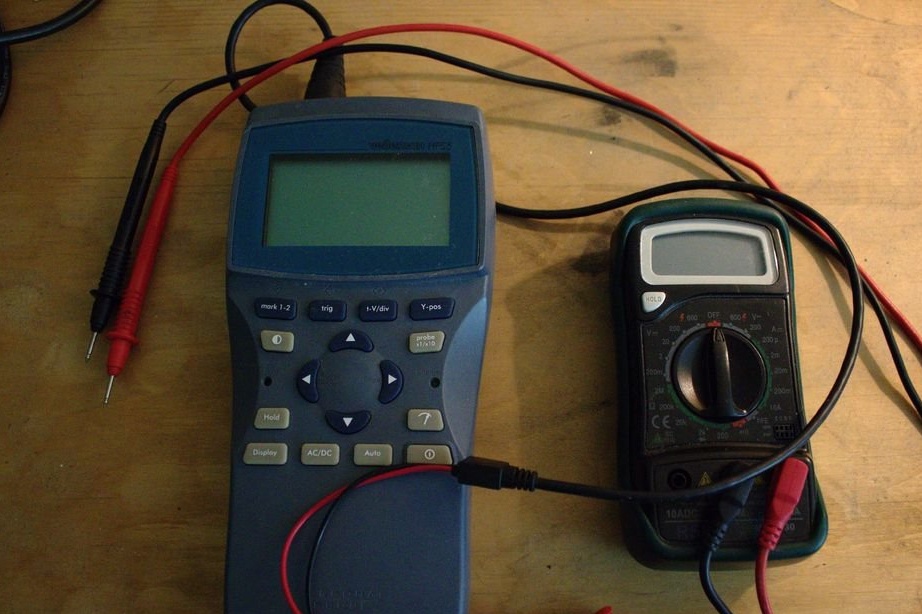
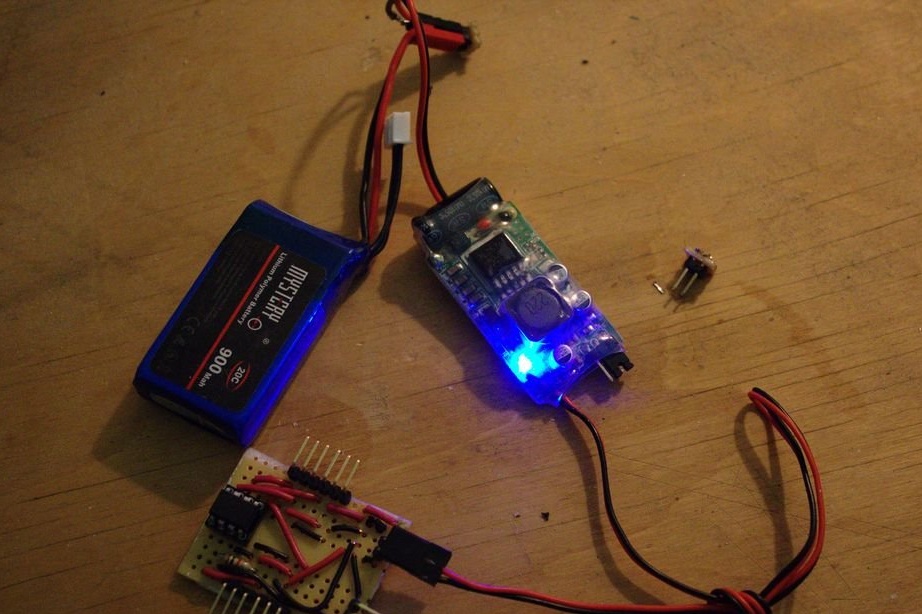
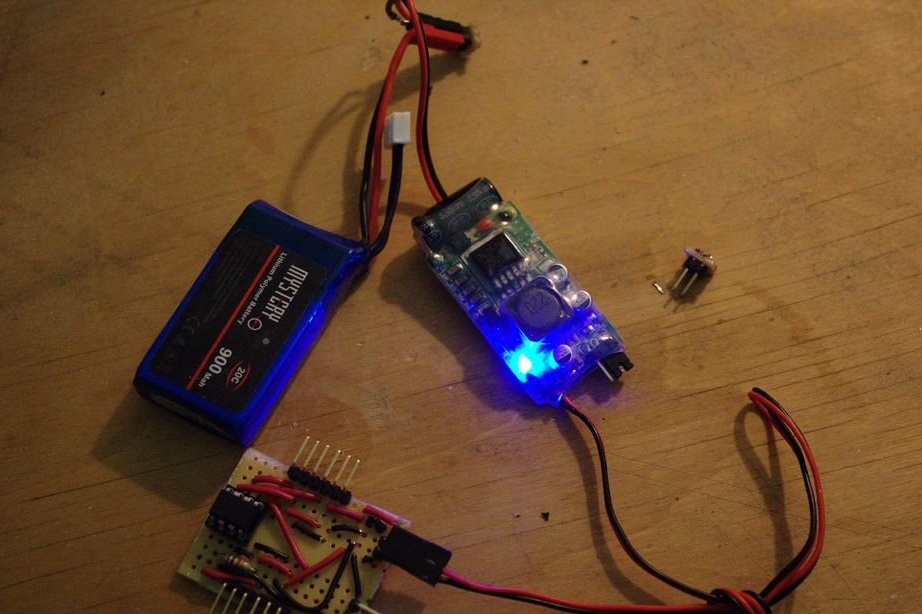
Matapos ma-download ang code, kailangan mong ikonekta ang servo drive, baterya at suriin ang operasyon ng aparato. Sa pamamagitan ng isang servo, kailangan mong suriin ang lahat ng mga utos sa pamamagitan ng pagkonekta nito na halili sa mga konektor. Ang bawat pindutin ng pindutan ay dapat na kapangyarihan ng isang servo.
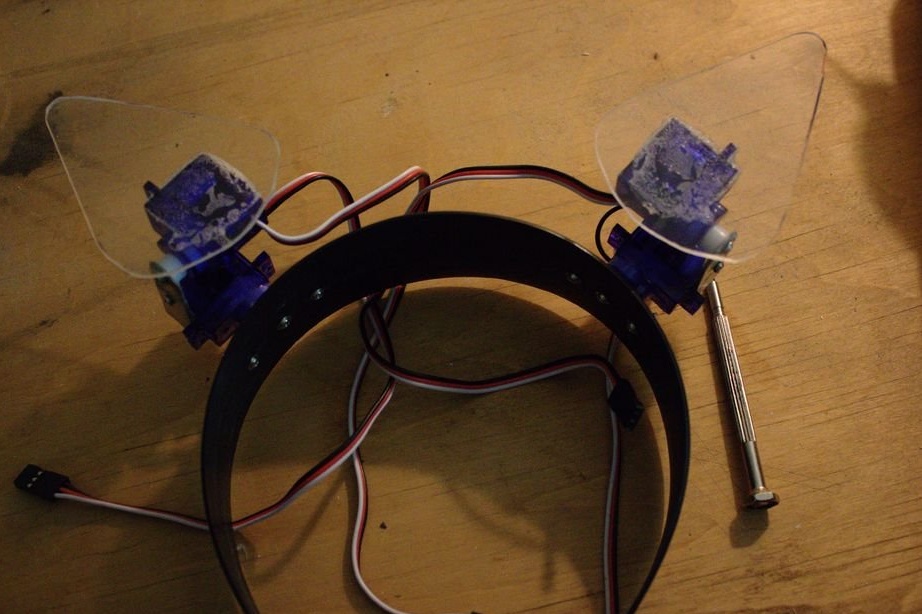
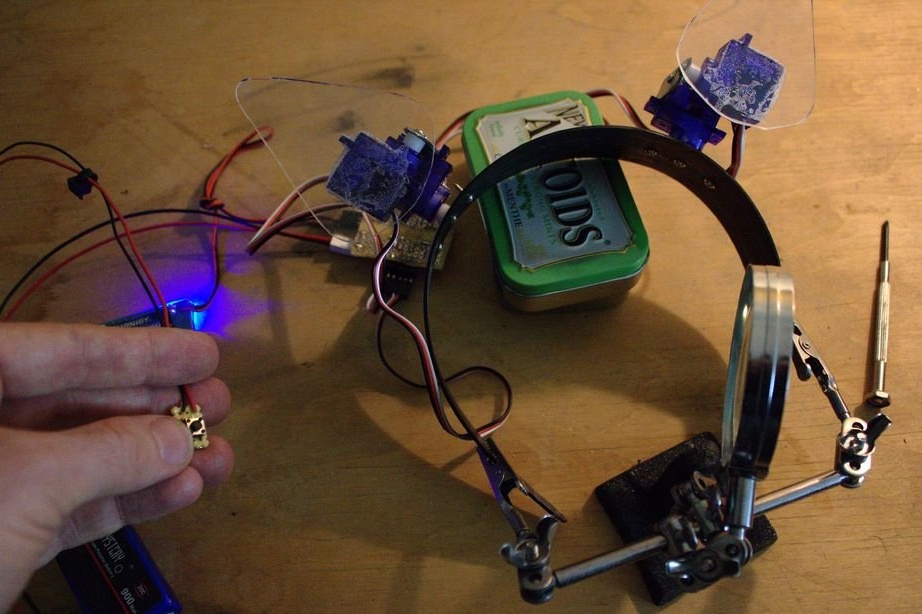
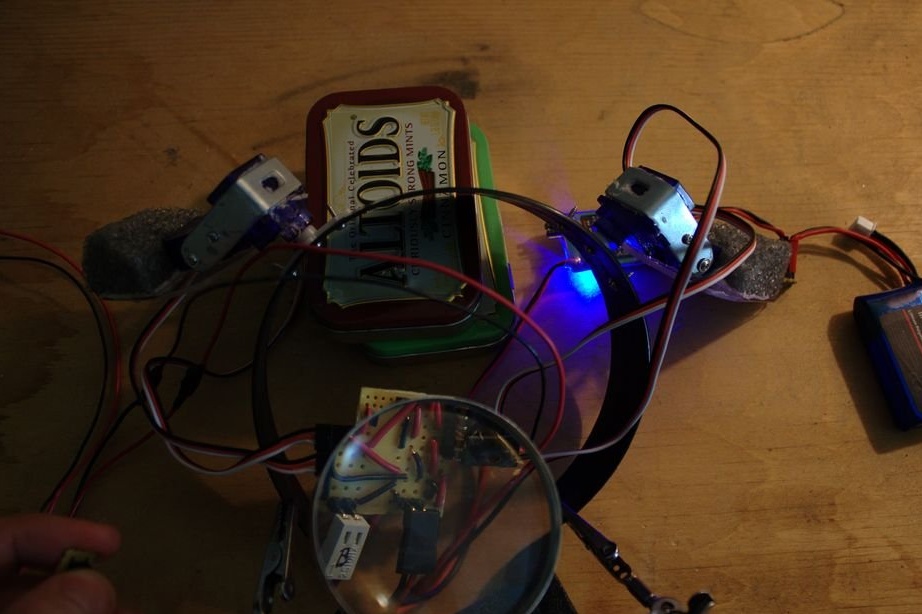
Hakbang Anim: I-install ang Servo Drives
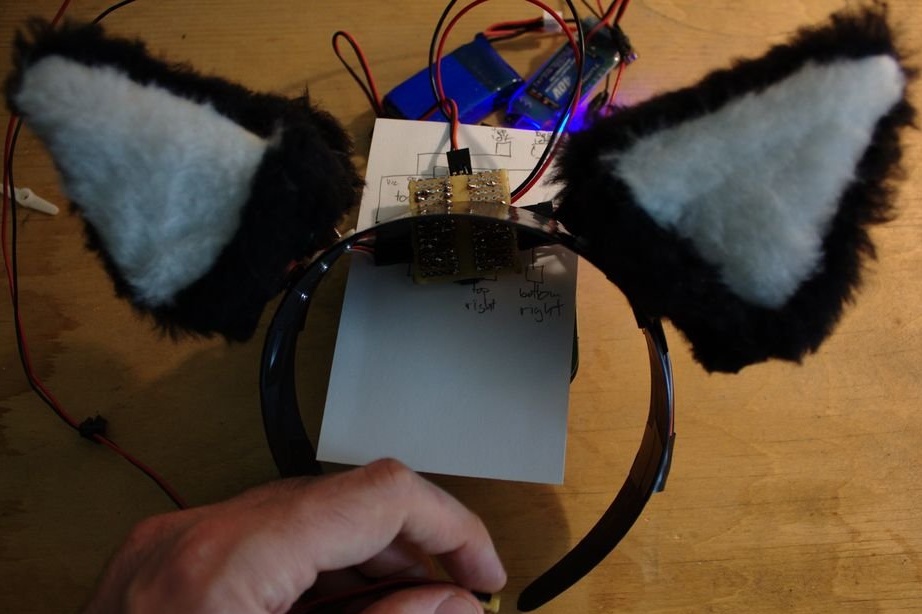
Ngayon ay kailangan mong i-install ang servos sa rim. Secure ang pangalawang servos. Mahalaga na itakda ang mga servo sa kanilang paunang posisyon. Pagkatapos ay kailangan mong ikonekta ang mga servo sa board. Ang lahat ng mga servo ay may tatlong mga wire: itim o kayumanggi para sa saligan, pula para sa kapangyarihan (~ 4.8-6 V), dilaw, orange, o puting signal wire (3-5 V). Ang pagkonekta sa mga servo sa microcontroller ay nagsasangkot sa sumusunod na pamamaraan:
Pin 5 (PB0) - Lower Right Servo
pin 2 (PB3) - kanang itaas
pin 6 (PB1) - ibabang kaliwa
pin 7 (PB2) - itaas na kaliwa
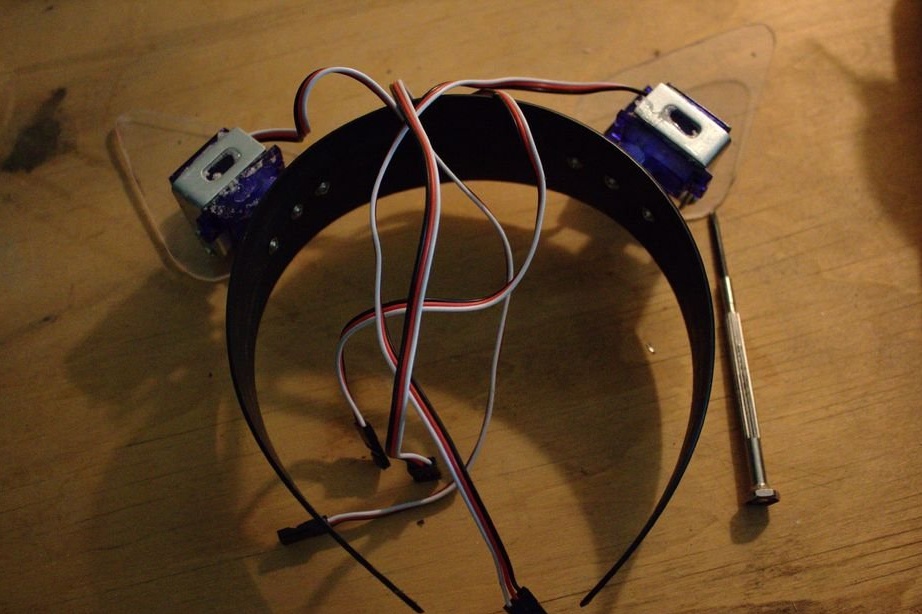
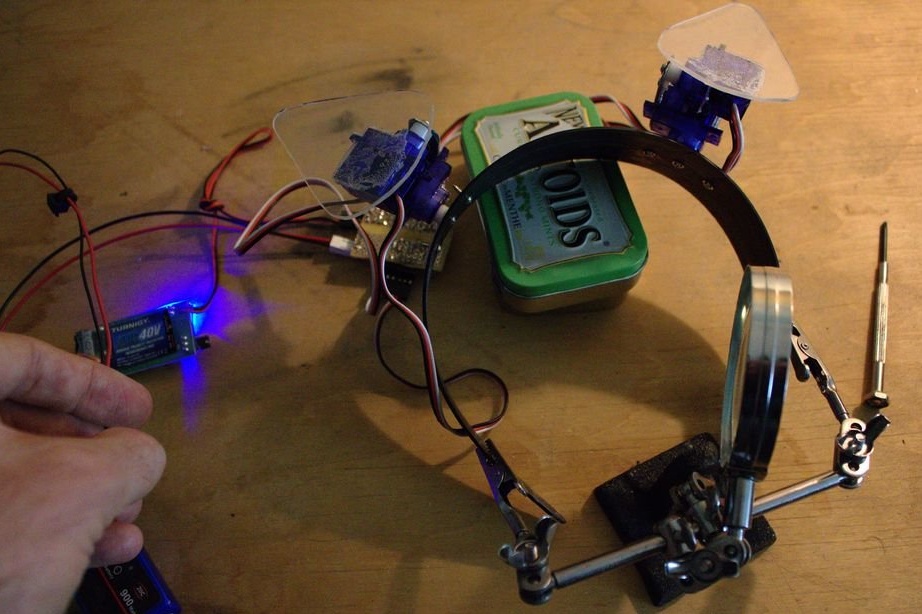
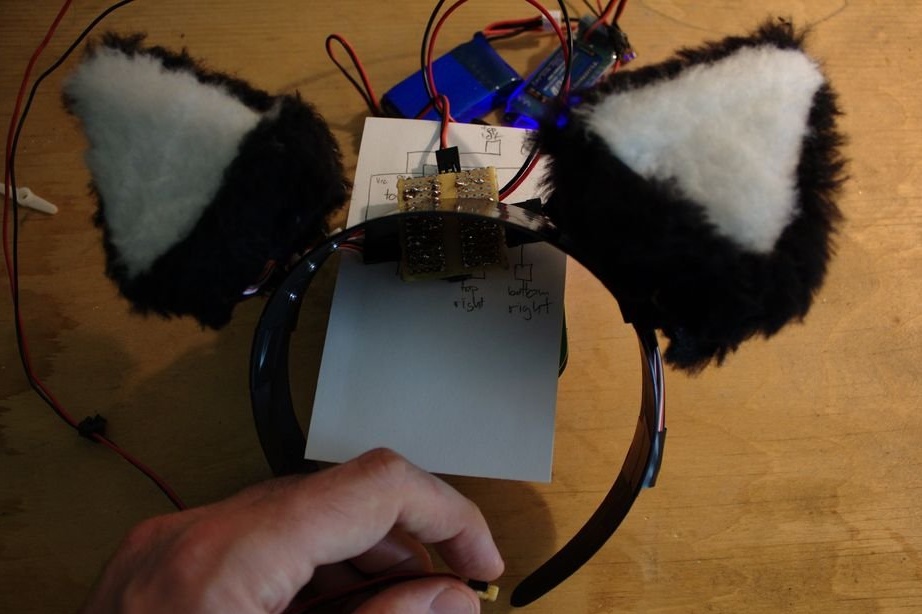
Matapos ang lahat ay konektado, kailangan mong i-on ang lakas ng circuit sa pamamagitan ng pagkonekta ng baterya sa regulator, at ang regulator sa circuit. Habang ang circuit ay naka-on, ang bawat isa sa mga servo ay mapoposisyon upang sila ay nasa nais na panimulang posisyon. Ang batayang servos ay dapat na nakaharap, at ang mga nangungunang servo ay dapat magkaroon ng acrylic (base) sa parehong eroplano tulad ng mukha.
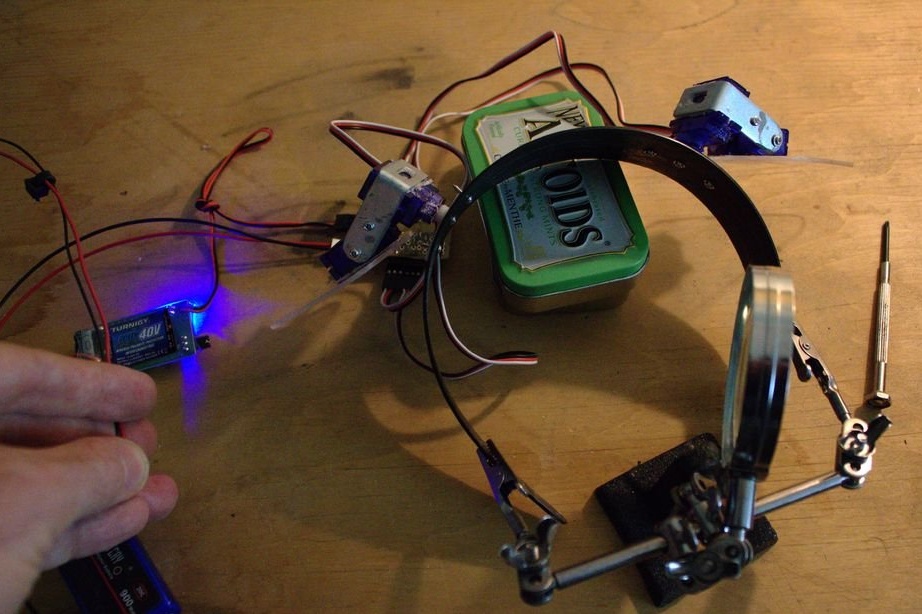
Matapos maitakda at konektado ang lahat ay kinakailangan, isasagawa nito ang bawat isa sa mga naibigay na paggalaw upang matiyak na maaari silang ilipat gamit ang isang buong hanay ng paggalaw, nang walang paghagupit.
Ang pagpindot sa pindutan ay ang mga sumusunod: pindutin nang matagal ang, dobleng pindutin at hawakan ang pindutan, triple press. Ang bawat isa sa mga pagkilos na ito ay nagbibigay ng isang utos para sa isang tiyak na kilusan.
Ikapitong hakbang: kaso
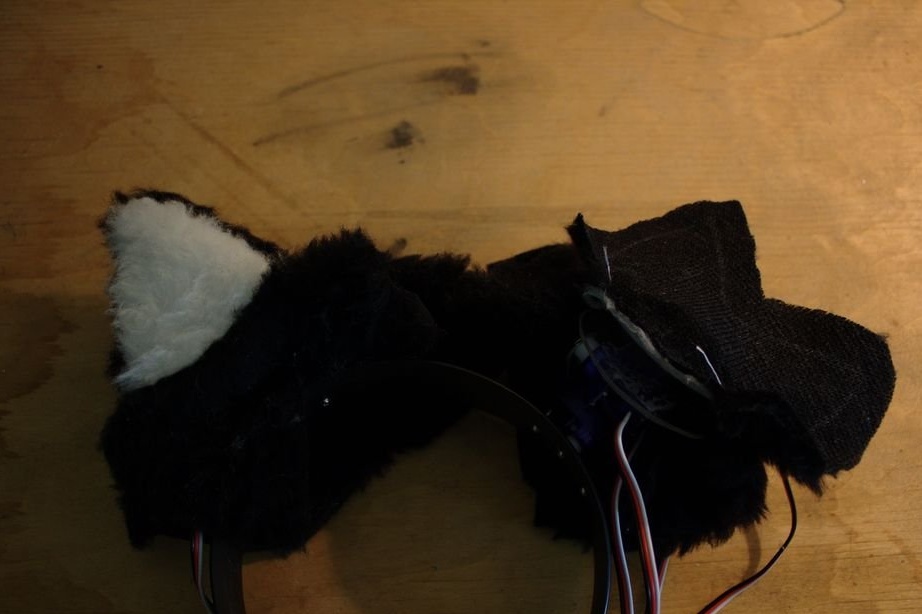
Ngayon ay maaari mong pagakupitin ang mga tainga ng balahibo, na nagbibigay sa kanila ng pagkakahawig ng isang pusa.









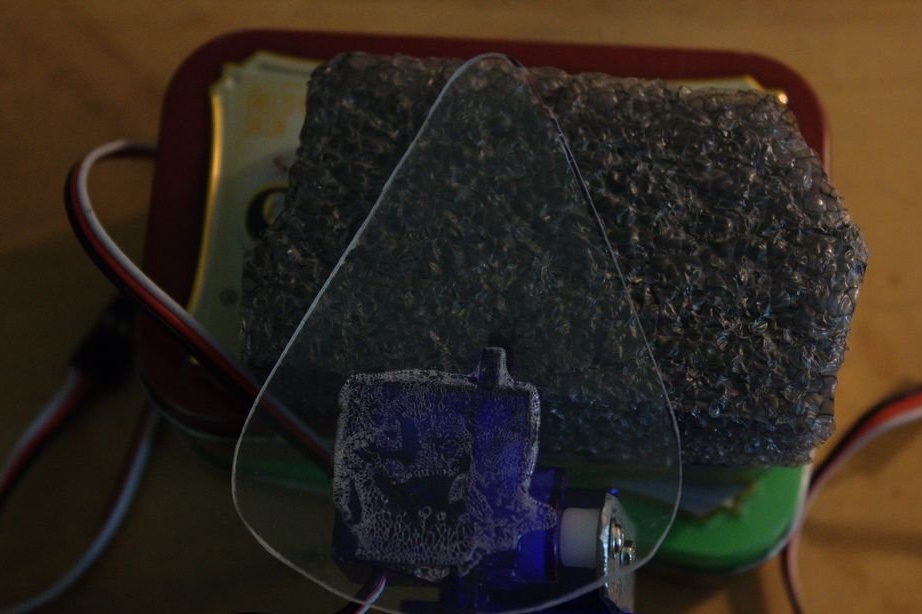
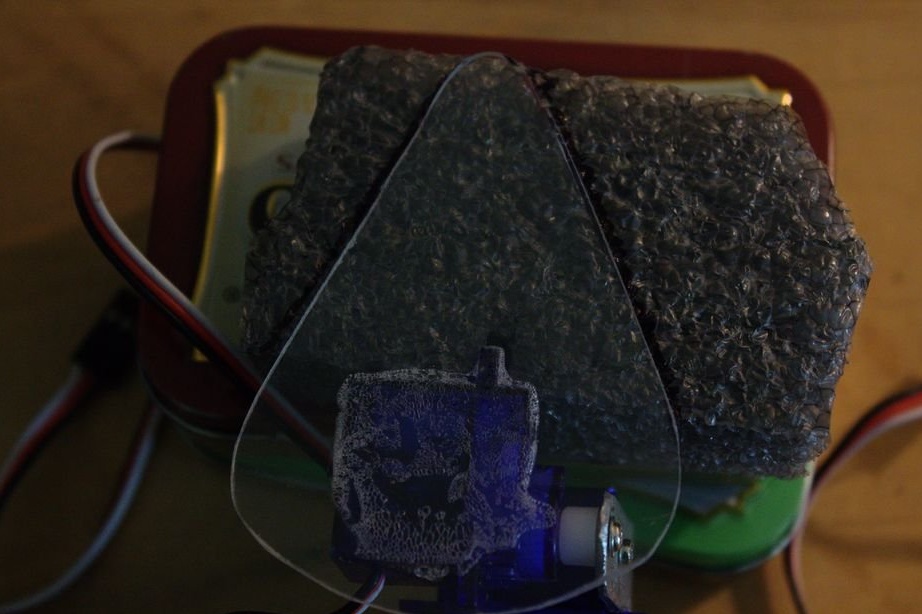
Para sa dami, ang master ay nakadikit ng mga piraso ng bula sa base. Ang hakbang na ito ay maaaring hindi kinuha, ngunit sa ganitong paraan mukhang mas maganda ang mga tainga.







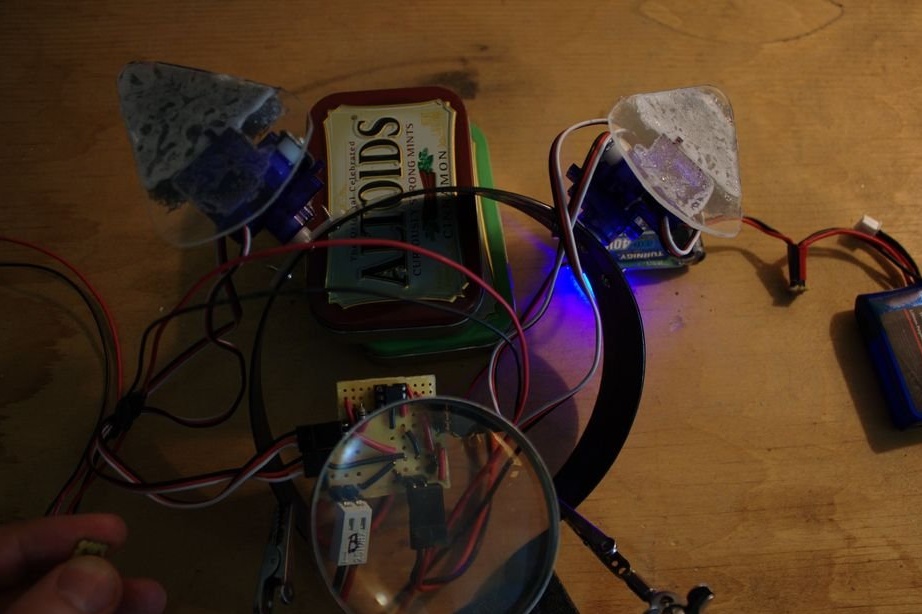
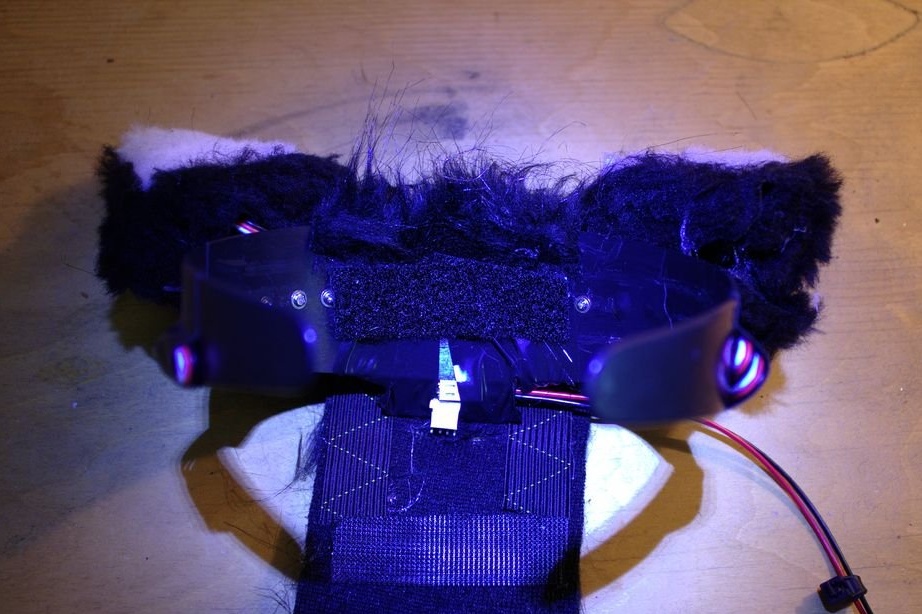
Ngayon kailangan mong tiyaking muli na ang mga servo sa lahat ng mga eroplano ay lumipat nang walang pagpindot at maaari mong ayusin ang takip. Ang master ay nakadikit ng isang takip ng balahibo gamit ang mainit na matunaw na malagkit. Kapag gluing, kailangan mong tama na makalkula ang mga gluing point. Ang tela ay hindi dapat sag, ngunit hindi rin dapat maiwasan ang paglipat ng mga servo. Kailangang mai-trim ang labis na tisyu.



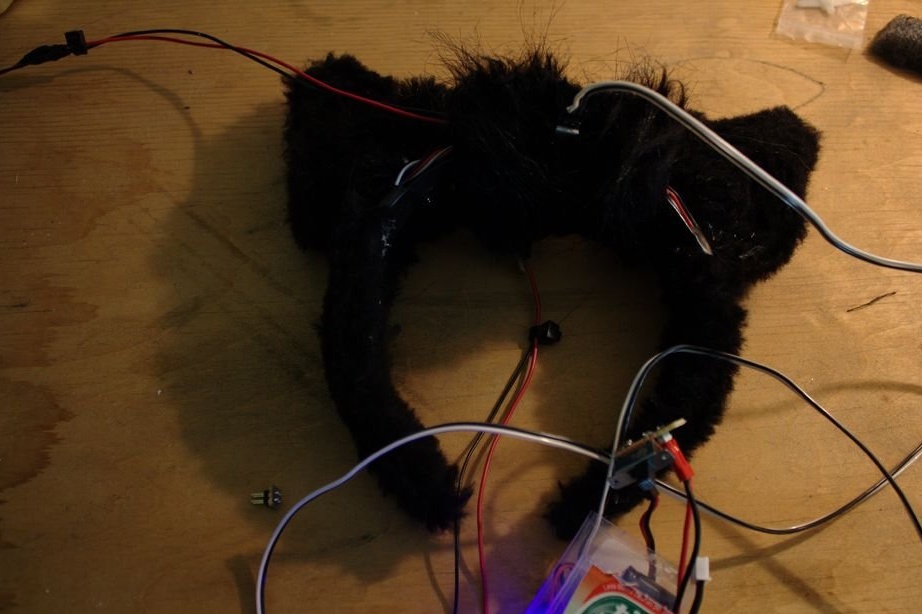
Hakbang Eight: Pangwakas na Assembly
Ngayon ay oras na upang makumpleto ang produkto. Pinuno ng master ang rim ng balahibo. Ang baterya at regulator ay naka-secure sa isang plastic container, at pagkatapos ay sa isang bulsa sa likod ng rim.

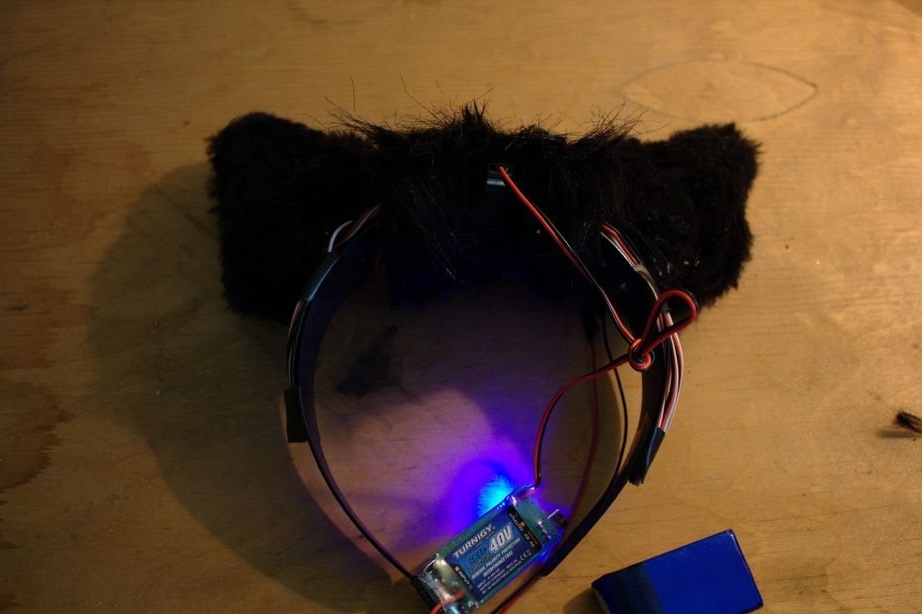




Handa na ang lahat. Sa ibaba maaari mong makita ang ilang higit pang mga halimbawa ng aparato.