




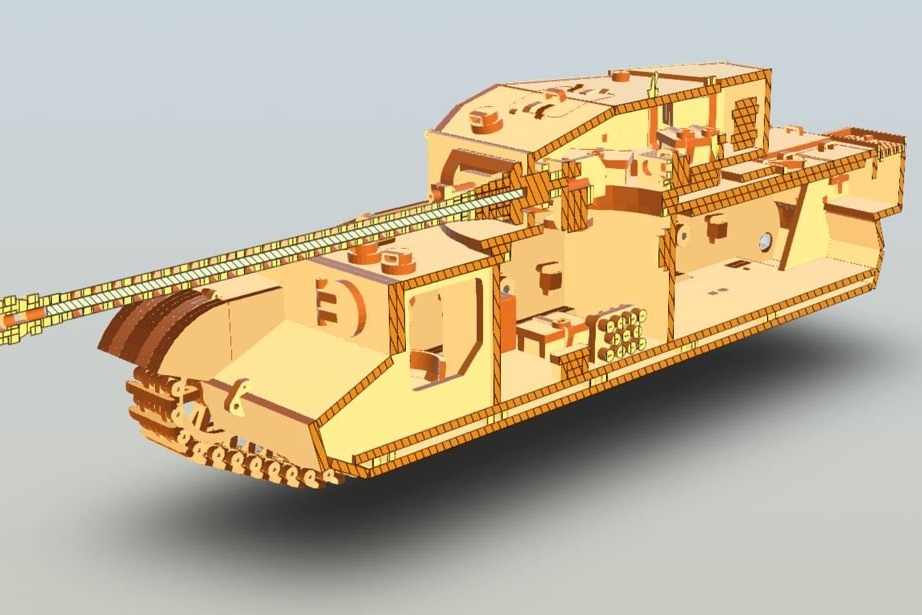
Ang tangke na ito ay hindi ang unang pagpupulong ng master. Ang isang natatanging tampok ng partikular na modelo na ito ay isang pagsuspinde sa tagsibol, na pinapaloob ang modelo sa isang engine, pagpapanatili.
Panoorin natin ang isang demo.
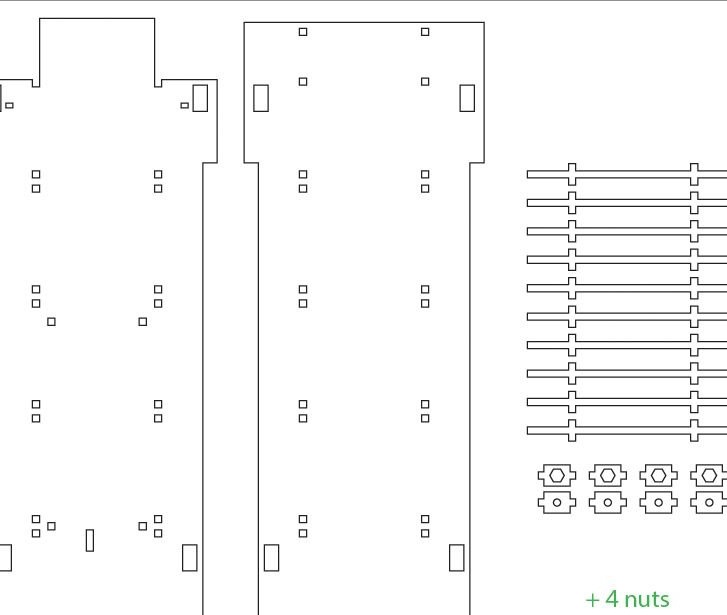
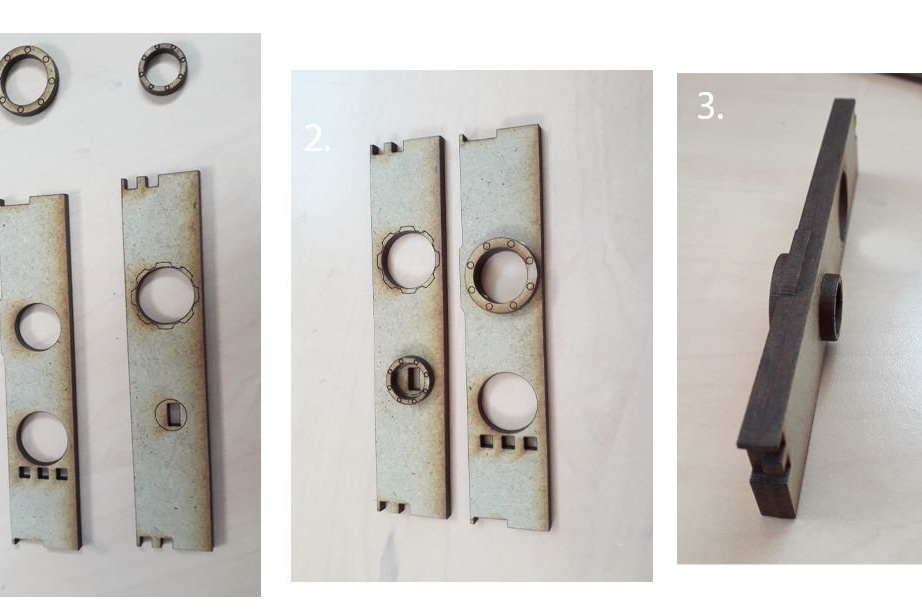
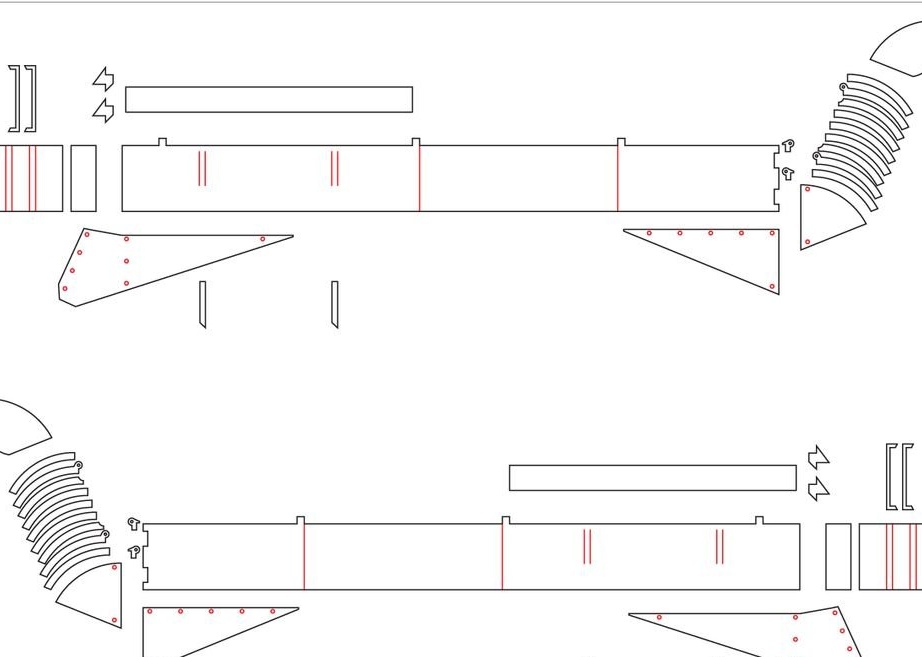
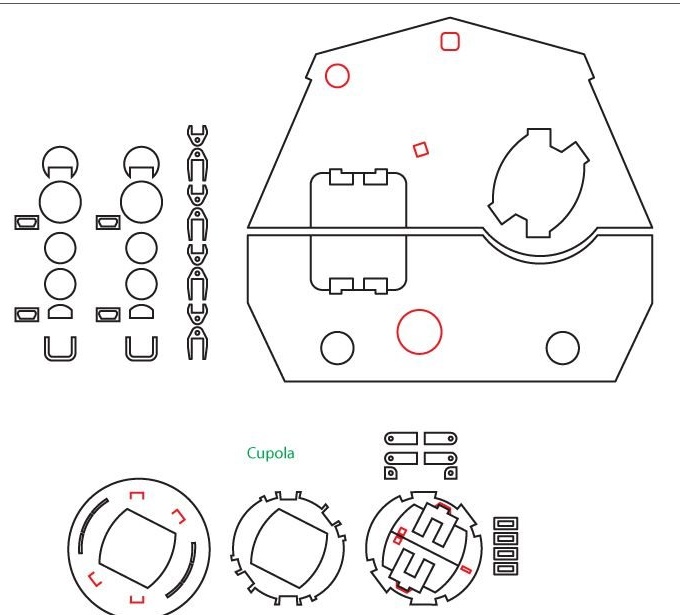
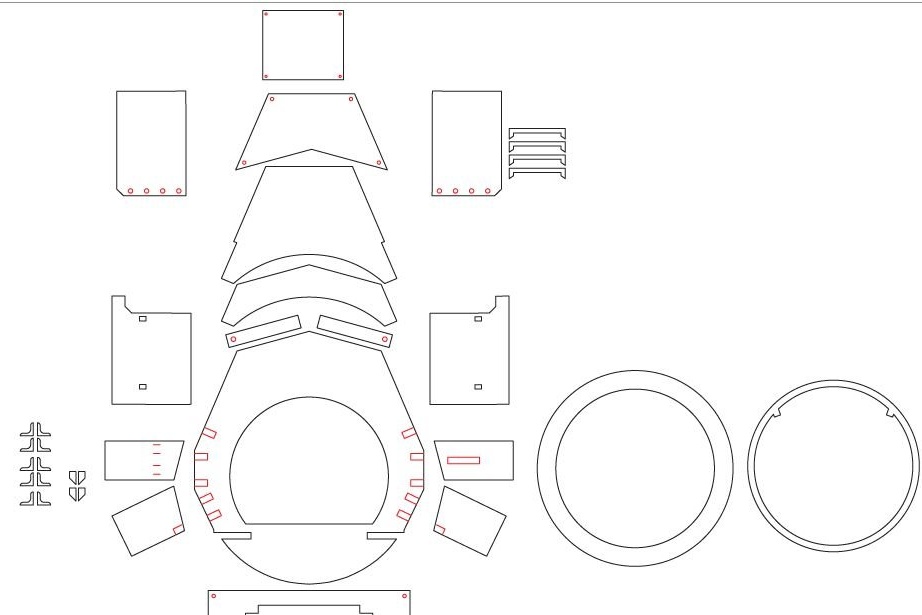
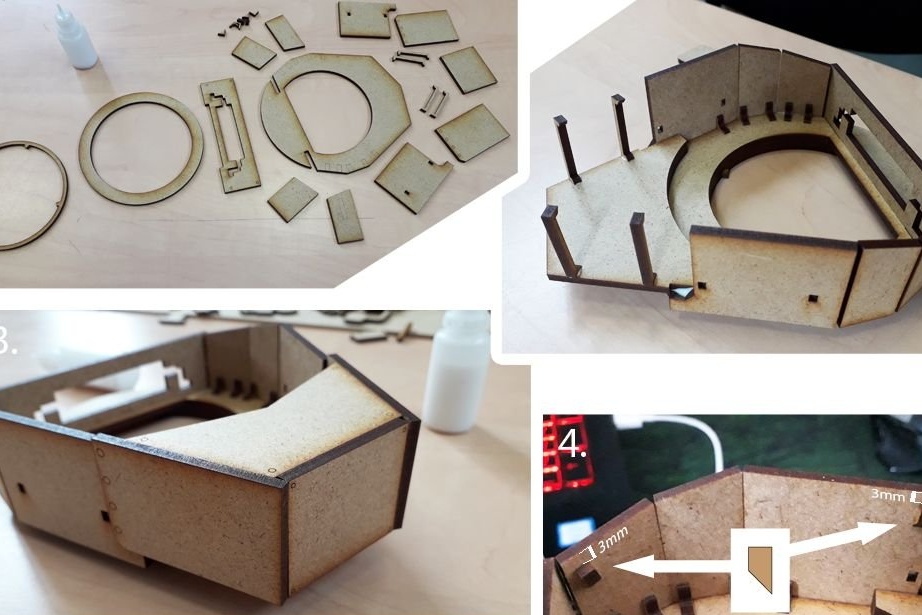
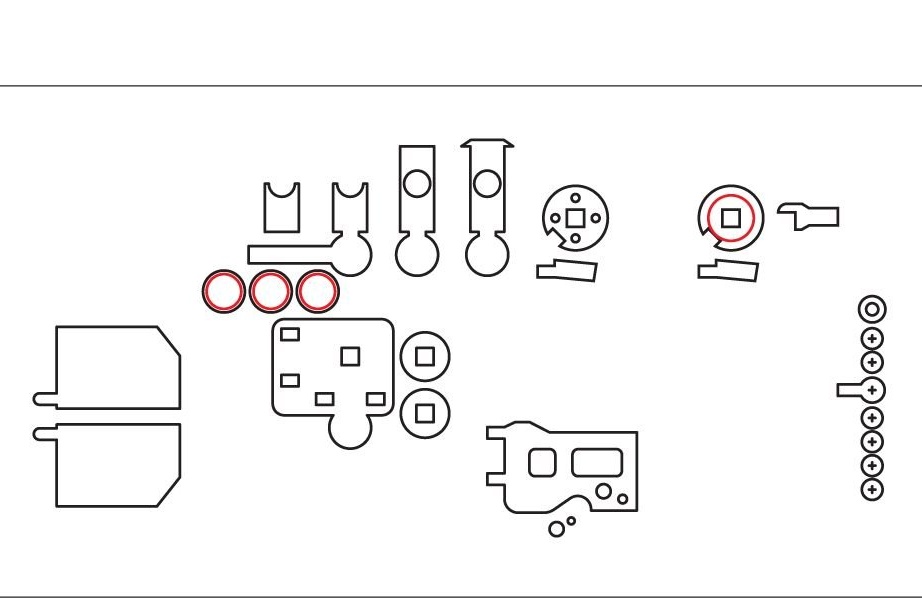
Ang mga detalye ng kaso ay pinutol sa isang laser cutter, at ang mga file ay magagamit sa ang link na ito.
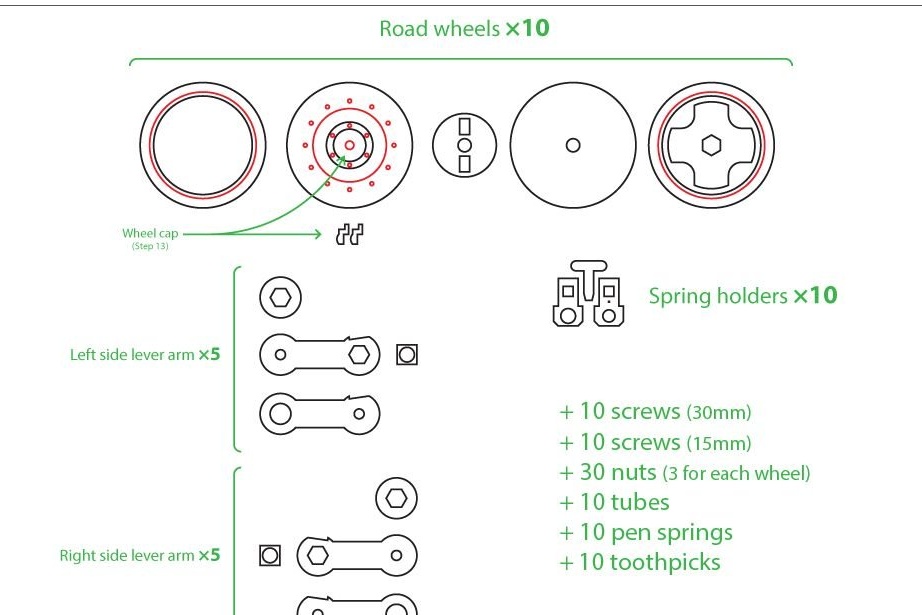
Bilang karagdagan sa mga bahagi ng katawan, kakailanganin ang mga sumusunod
Mga tool at materyales:
- Mga Screw Ø 3 mm:
-14 pcs na 15 mm ang haba,
-10 pcs 25 mm ang haba,
-10 pcs 30 mm ang haba.
-Tubes x20 Ø4 mm (Ø3 mm panloob na diameter);
-Metal wire Ø 1 mm;
-Ø3 mm may sinulid na baras;
-Springs para sa mga pendants Ø 4.5 mm at isang haba ng 30 mm -10 na mga PC;
- Mga Screws M4 2 mga PC;
Mga ngipin
-Board;
Microcontroller ESP8266;
-Konekta ang mga wire;
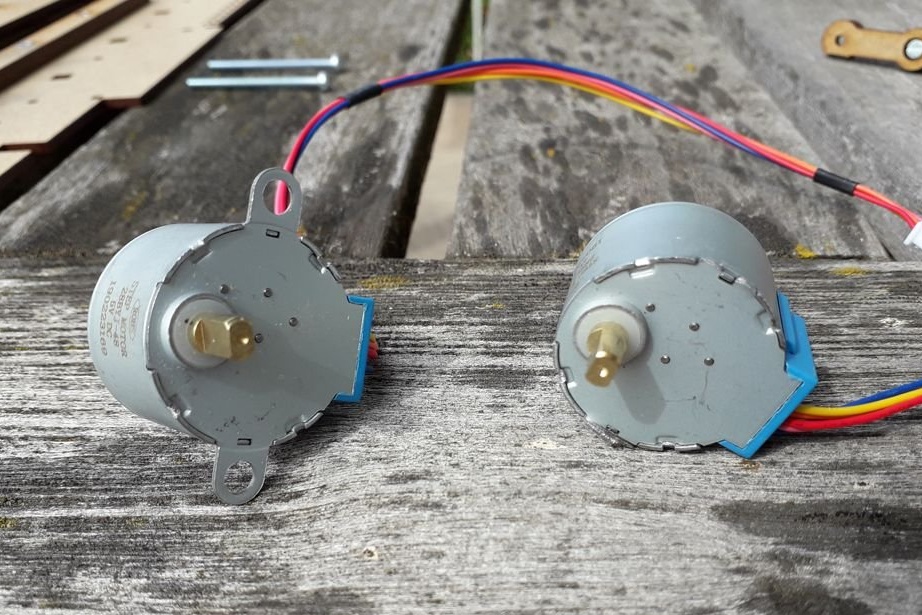
- 28BYJ-48 engine na may control board - 2 mga PC;
-Battery 5V;
Hakbang Una: Suriin
Sa hakbang na ito, inilantad ng master ang kanyang ang modelo tangke at nagpapahiwatig din ang link sa site kung saan makikita mo ang tanke sa isang disassembled form.
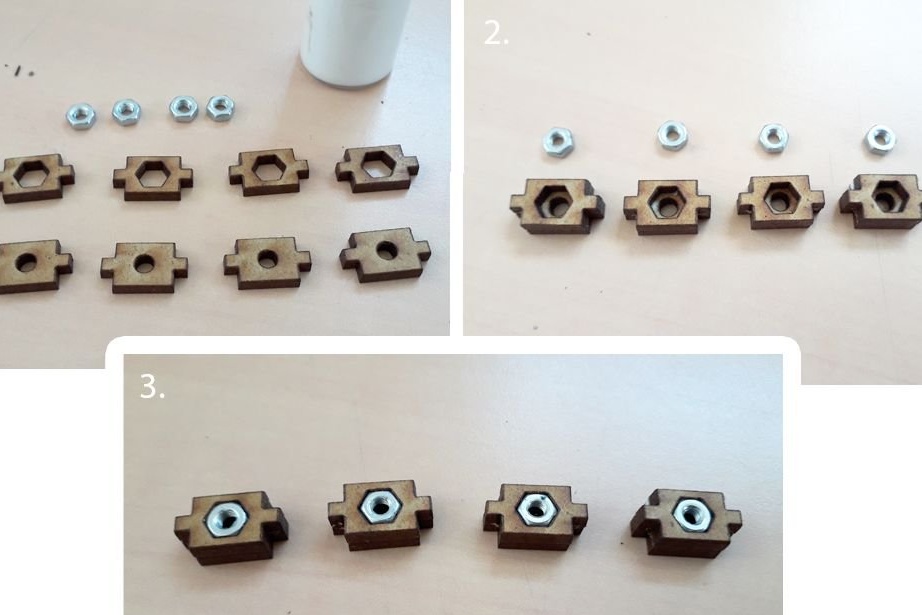
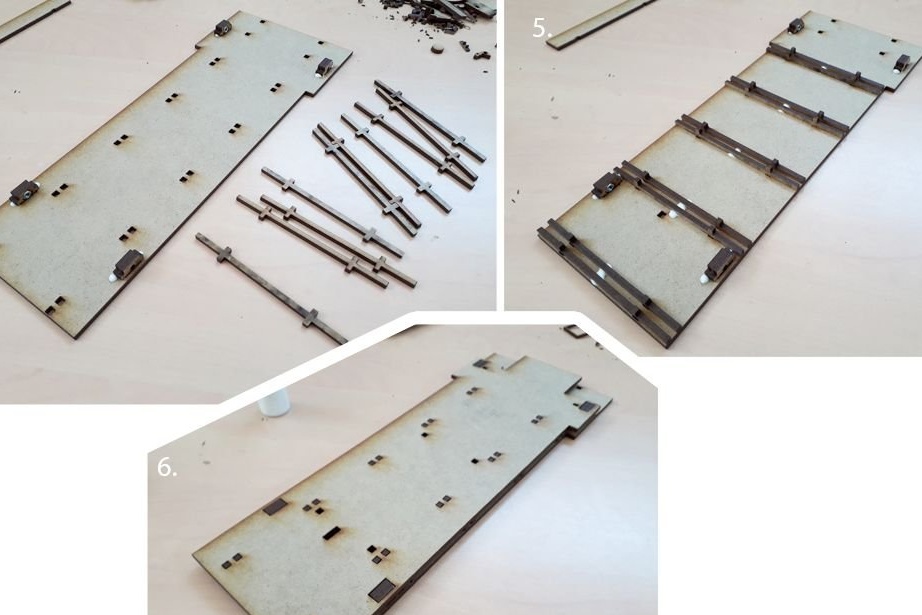
Ikalawang Hakbang: Ibaba
Ang master ay nagsisimulang magtipon mula sa ilalim ng tangke. Nag-install ng mga mani sa mga mount. Ang mga mount sa mga gilid ng ilalim. Sinusuportahan ng Establishes. Itinatakda ang pangalawang layer.
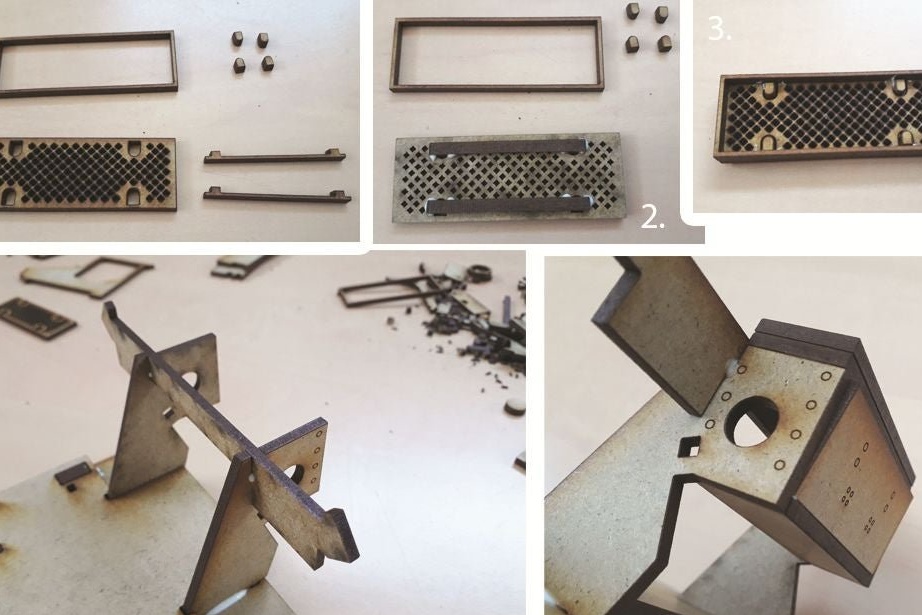
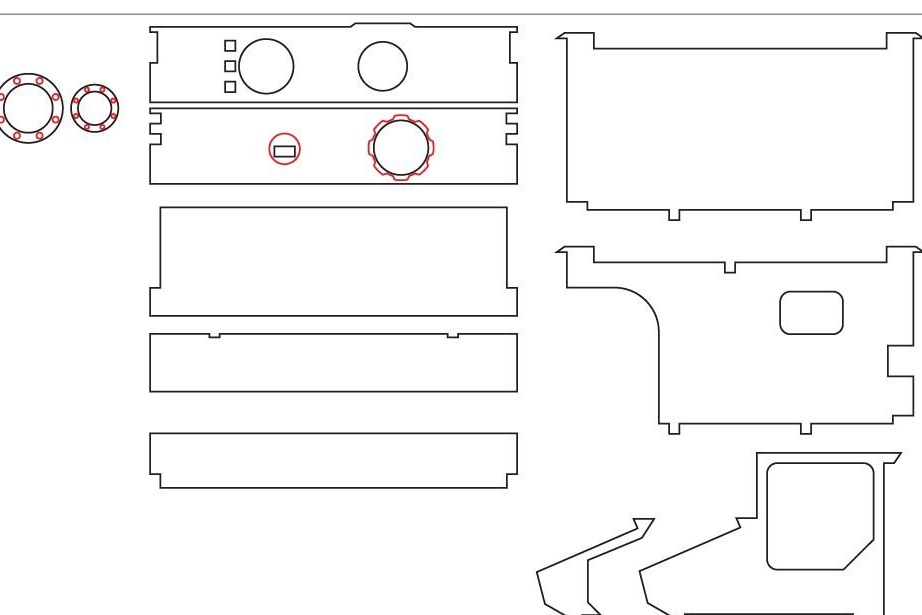
Hakbang Tatlong: Kaso
Nagsisimula sa pagpupulong ng katawan. Nagtitipon ng isang radiator at isang likod.
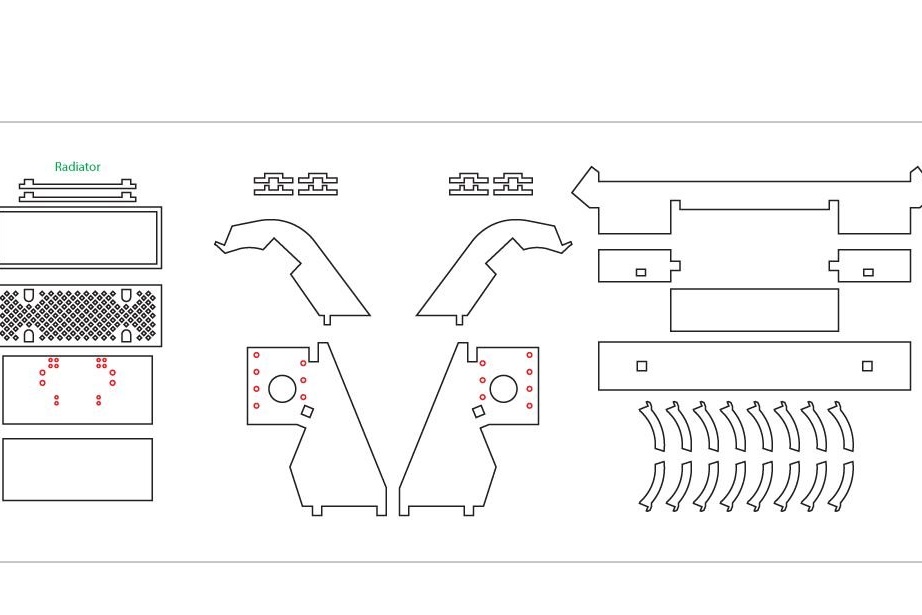
Pinipisan ang harapan.
Matapos ilagay ang nakasuot na sandata, ang katawan ay tapos na. Ang iba pang mga bahagi ay mai-screwed o nakadikit dito nang hindi nakadikit
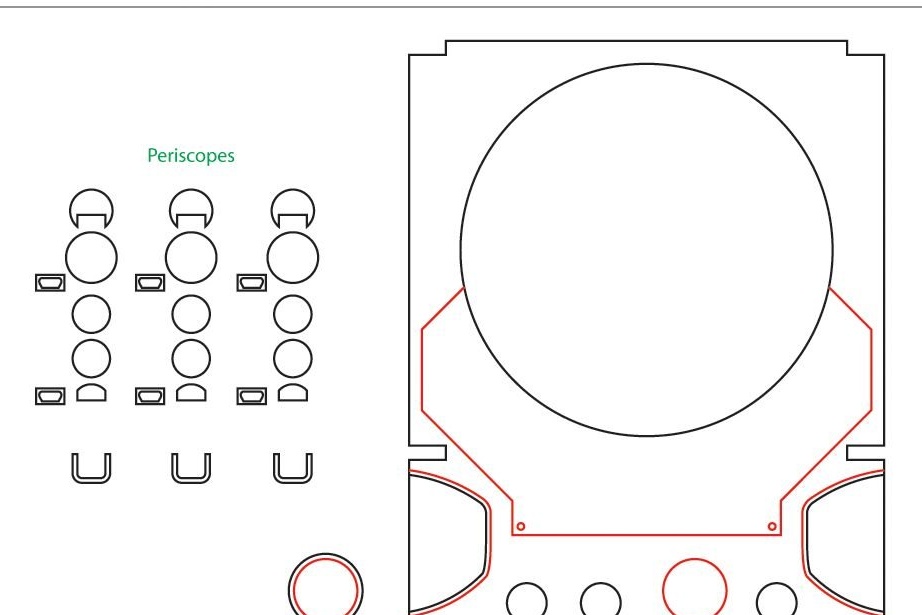
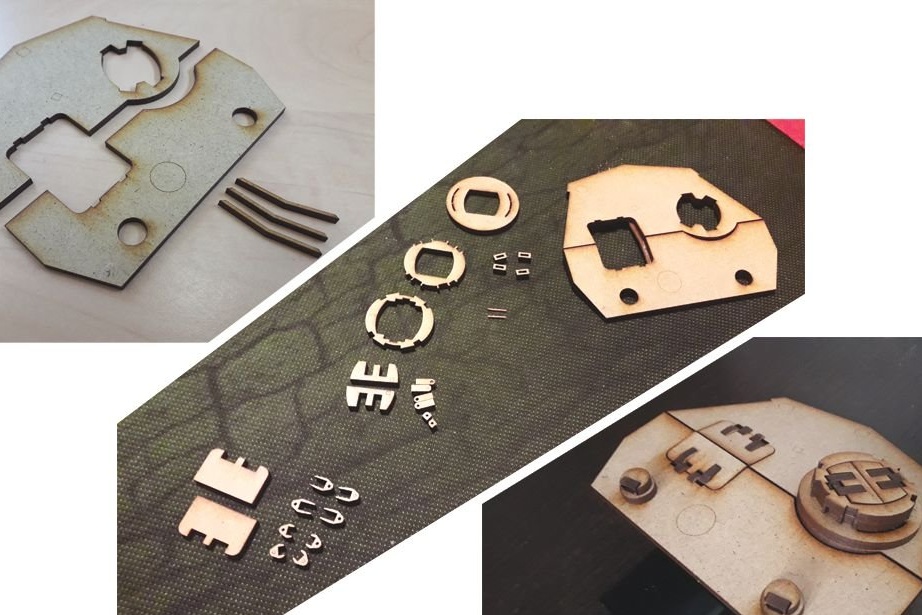
Ika-apat na Hakbang: Ang bubong at Periskop
Ang bahaging ito ay isang naaalis na bahagi. Ginagawa ito upang magkaroon ng access sa loob. Ang periskope lever ay naka-install sa dulo ng bubong. Ang periskope ay inilalagay sa bubong, ngunit hindi ito nakadikit.

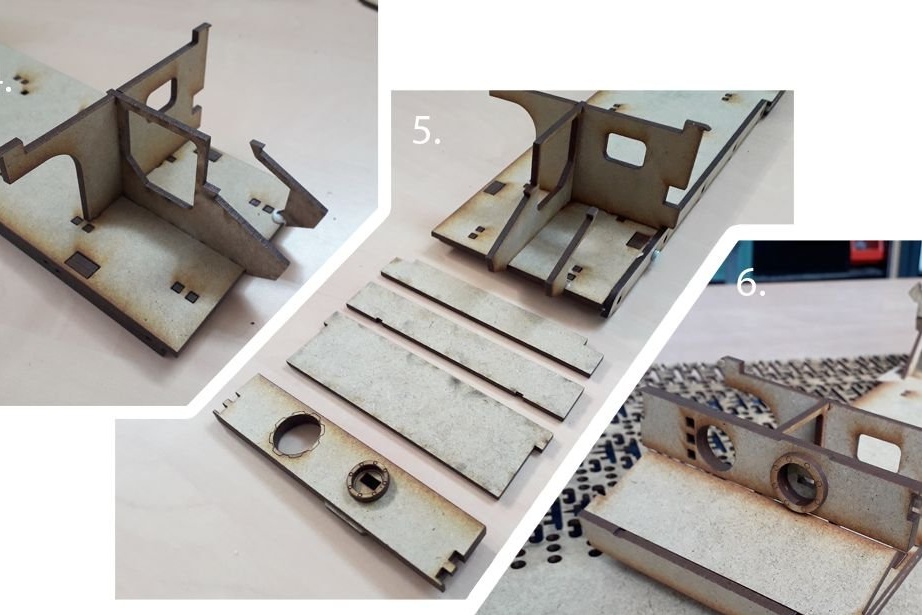
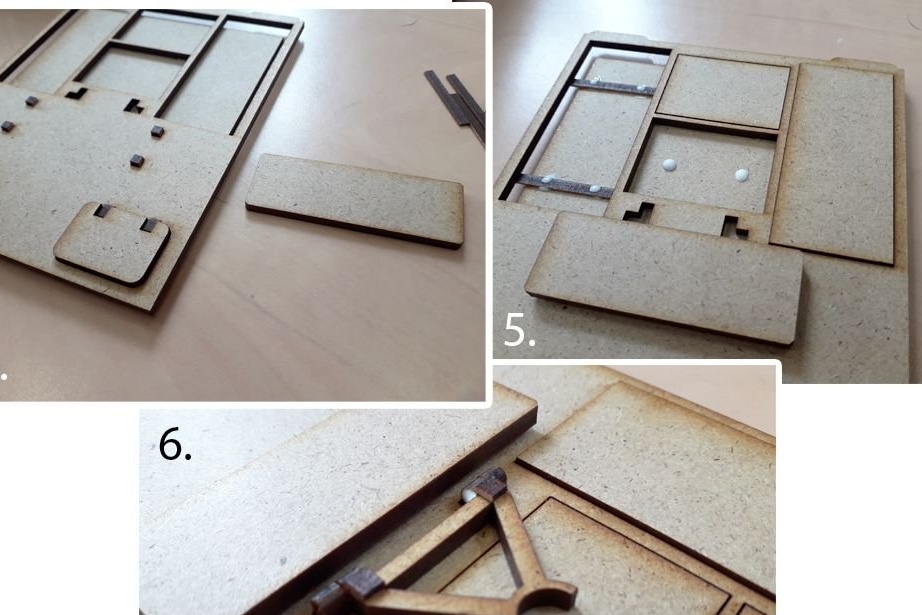
Hakbang Limang: Side
Ang mga sandata ng suspensyon ay naka-mount sa sidewall. Ito ay screwed sa dobleng ilalim na may 15 mm screws gamit ang 4 na mani na na-fasten sa unang hakbang.



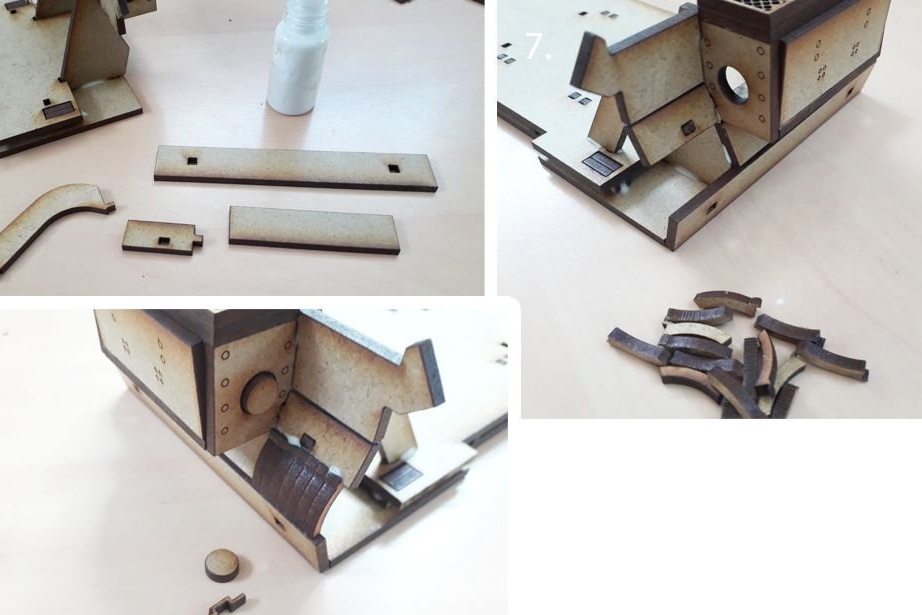
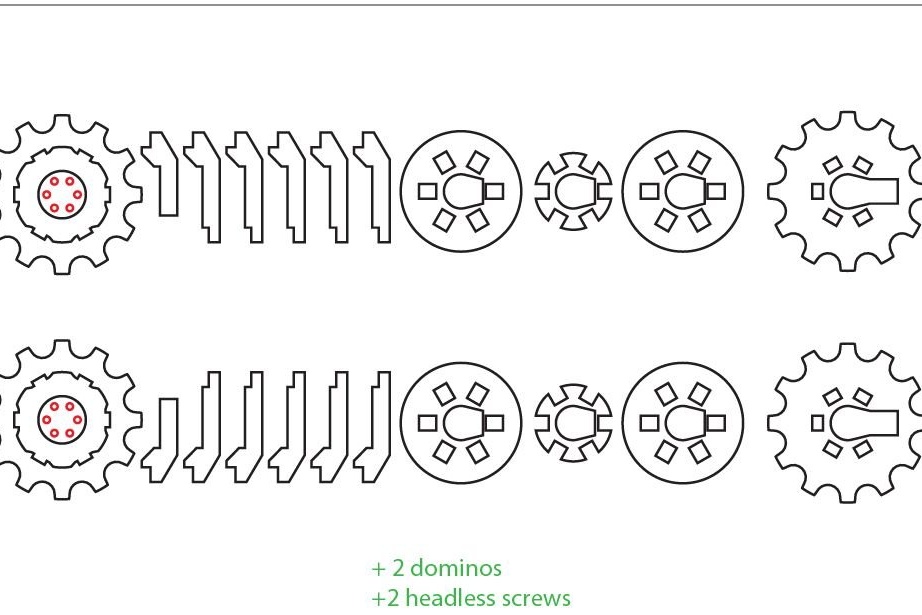
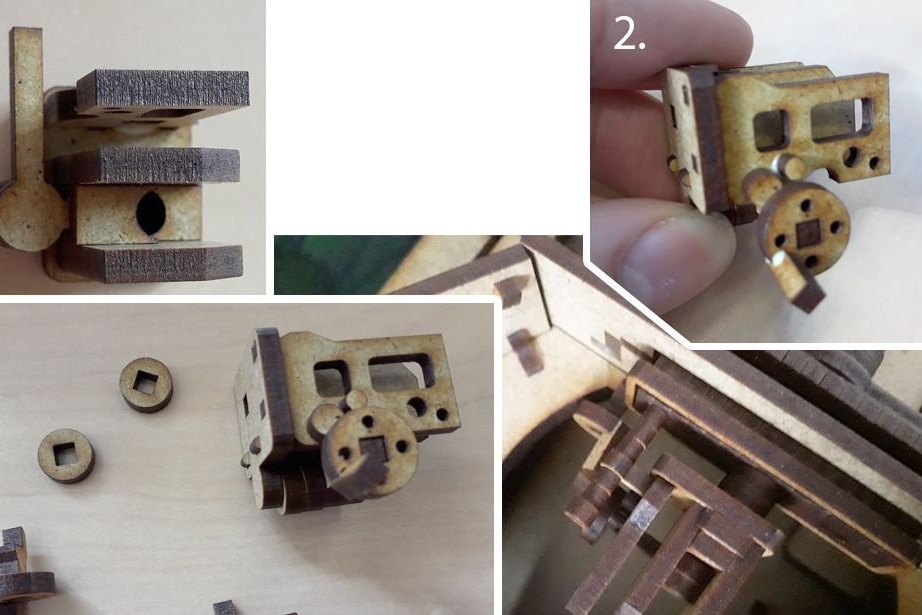
Hakbang Anim: Suspension
Nagtitipon at nag-install ng mga sangkap ng suspensyon. Ang lahat ng mga hakbang ay makikita nang detalyado sa mga litrato. Mag-apply ng isang maliit na pandikit sa mga dulo ng mga bukal para sa pag-aayos. Sa loob ng mga bukal ay nagtatakda ng mga piraso ng mga toothpicks. Pipigilan nito ang mga bukal mula sa paglabas.
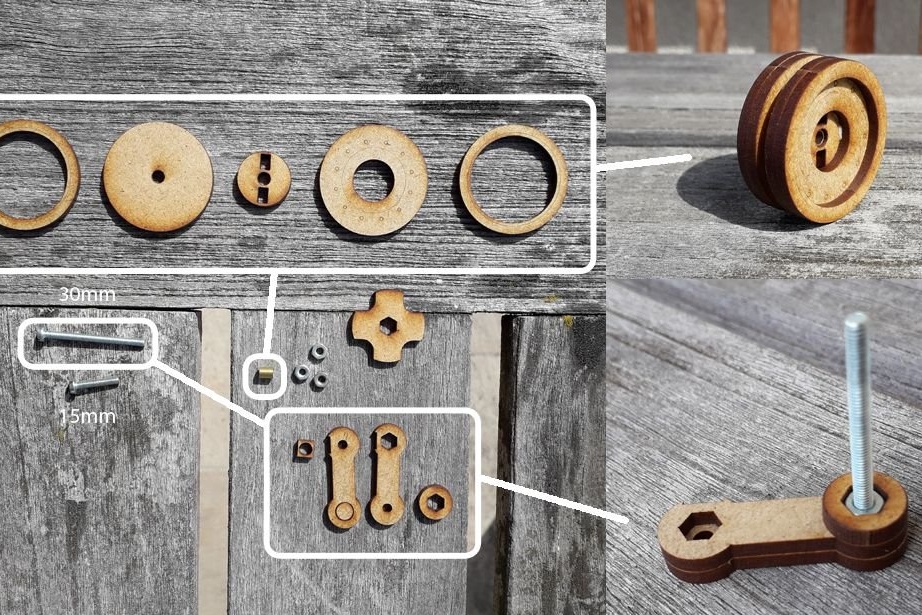

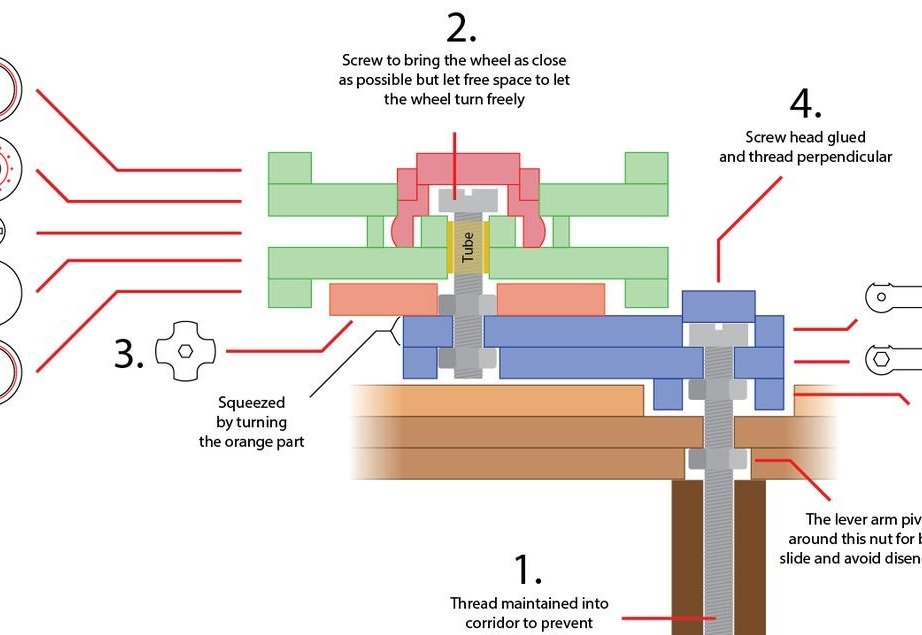
Nagtitipon at mai-install ang harap na mas mababang gulong. Ang isang tubo na tanso at isang 20 mm na tornilyo ay naka-install sa loob ng wheel hub. Pagkatapos ang hub ay sarado na may isang plug.
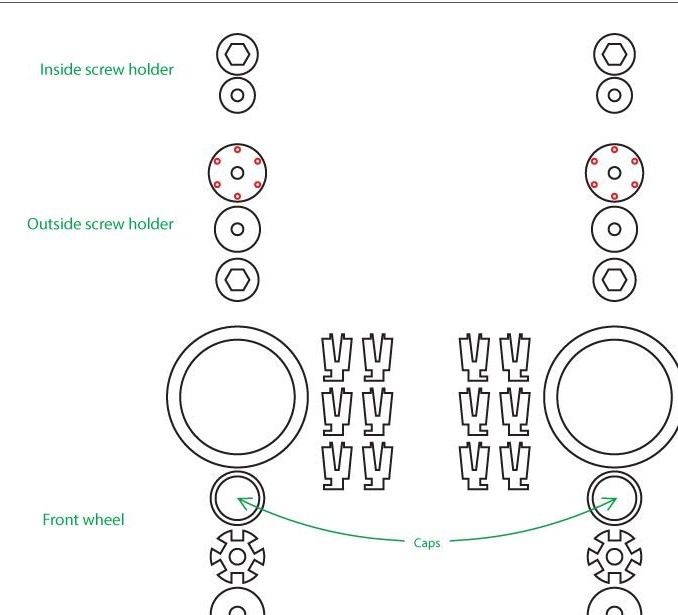

Nagtitipon at nag-install sa halip ng isang gulong.


Nagtitipon at nag-install ng mga gulong sa drive. Ang mga gulong ito ay konektado sa mga makina na naka-install sa tangke ng tangke.
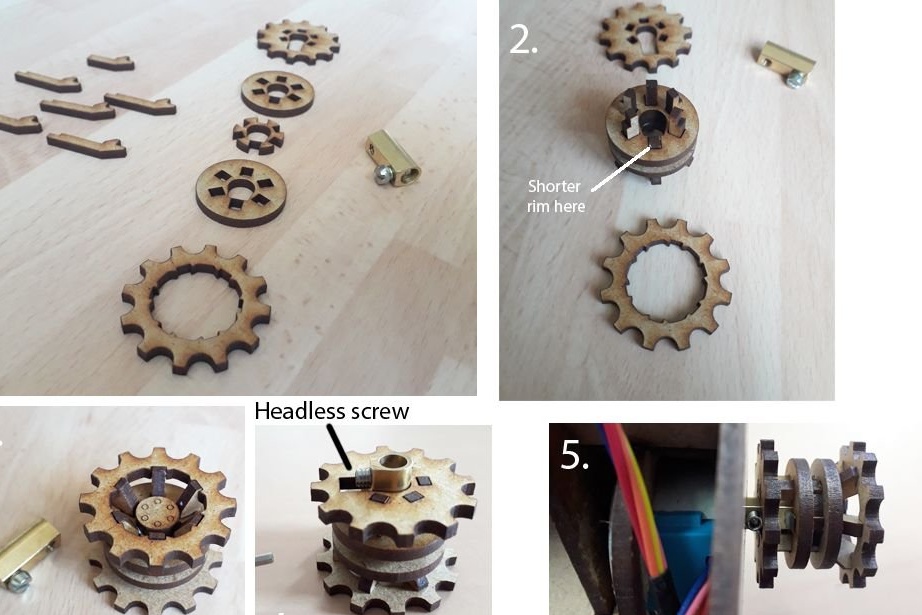
Mga pag-install ng plug sa mga gulong.

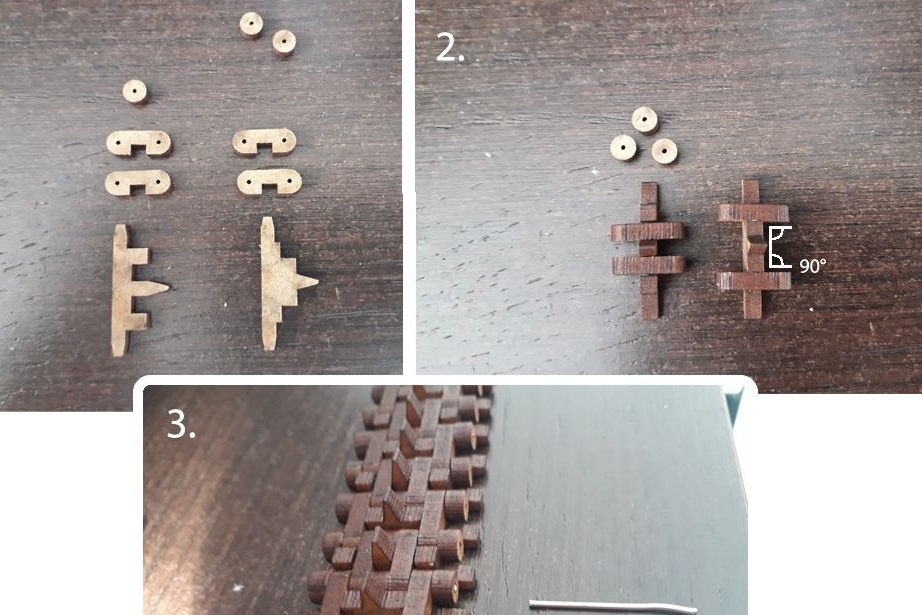
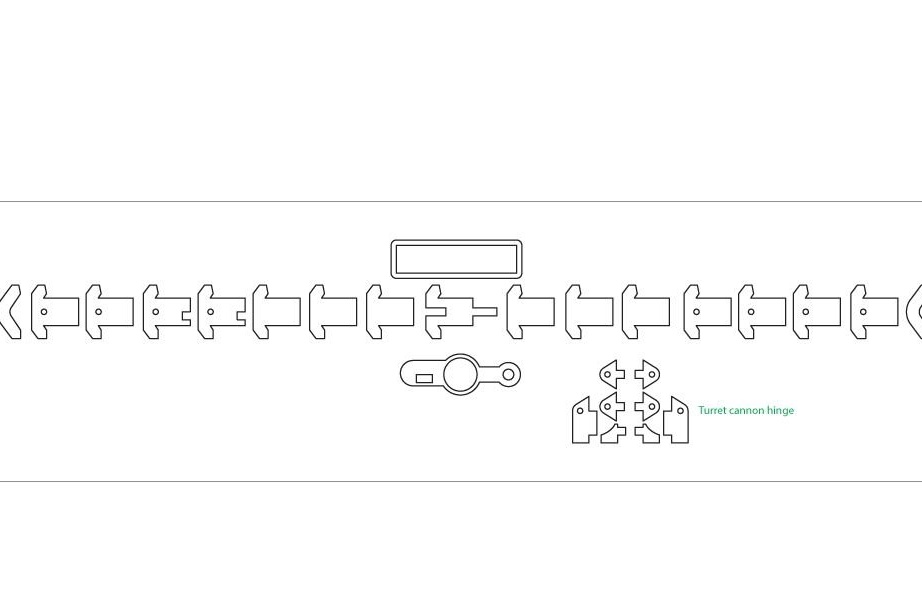
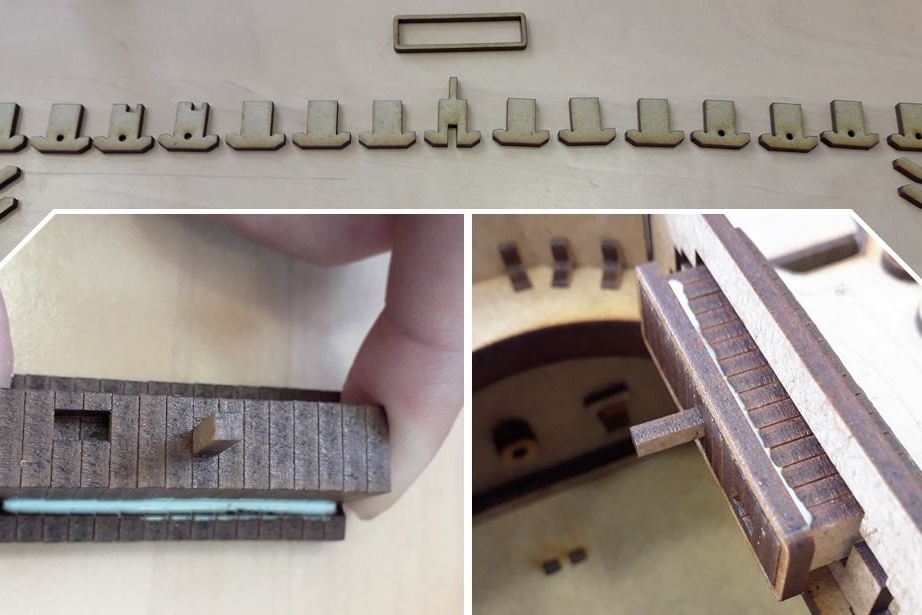
Hakbang Pitong: Subaybayan
Nangongolekta ng mga track ng uod. Ang mga track ay naka-fasten kasama ang isang manipis na kawad. Sa mga gilid ng kawad ay naayos na may takip.
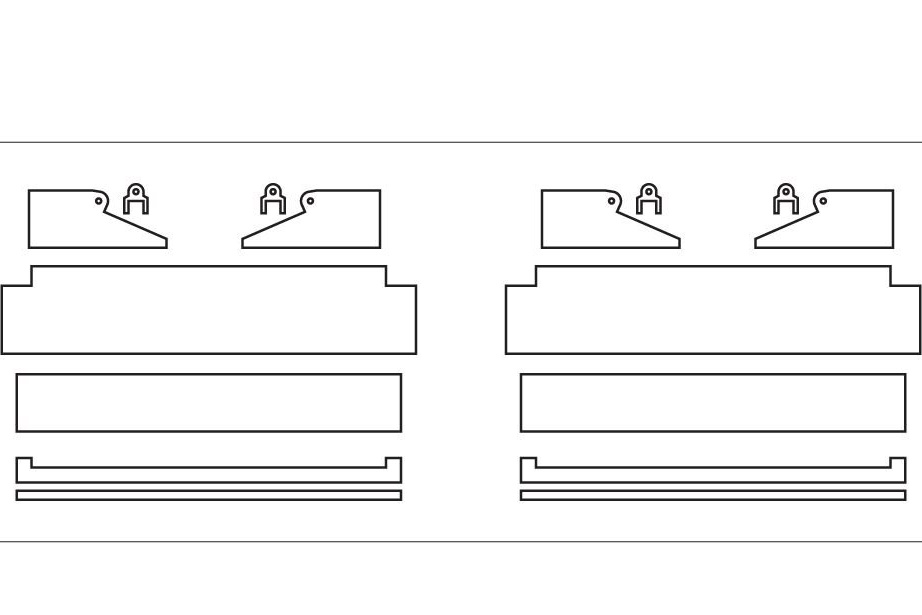
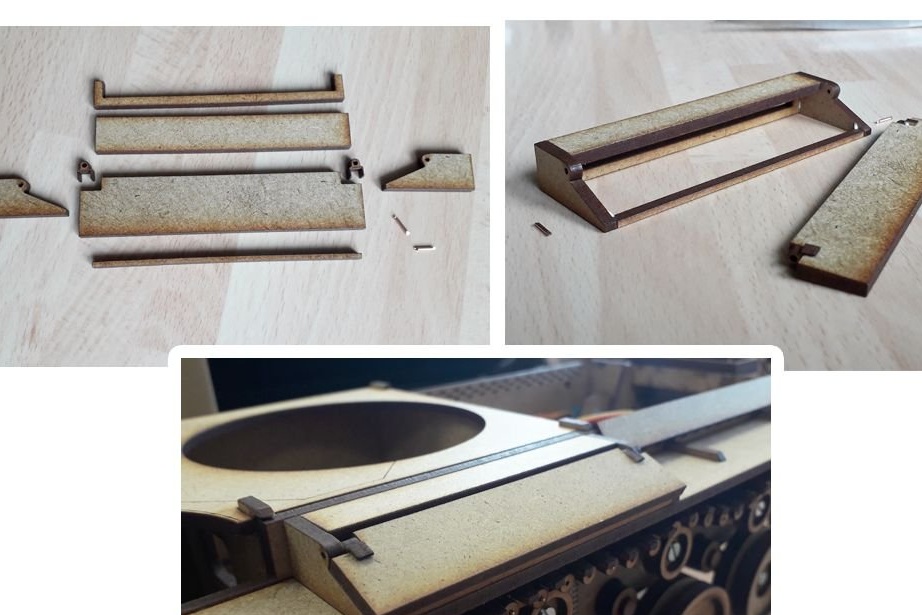
Hakbang Eight: Proteksyon ng Dirt at Drawer
Mga pag-install ng mga kalasag. Ang harap ng flaps ay maaaring ilipat at maaaring itaas.


Itinatakda ang drawer. Bilang mga loop, naka-install ang mga piraso ng kawad.
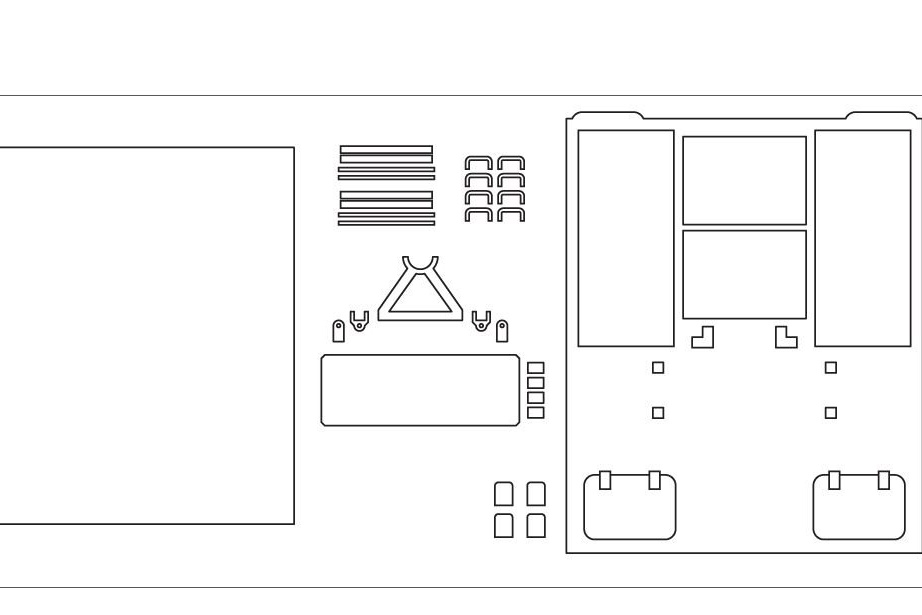
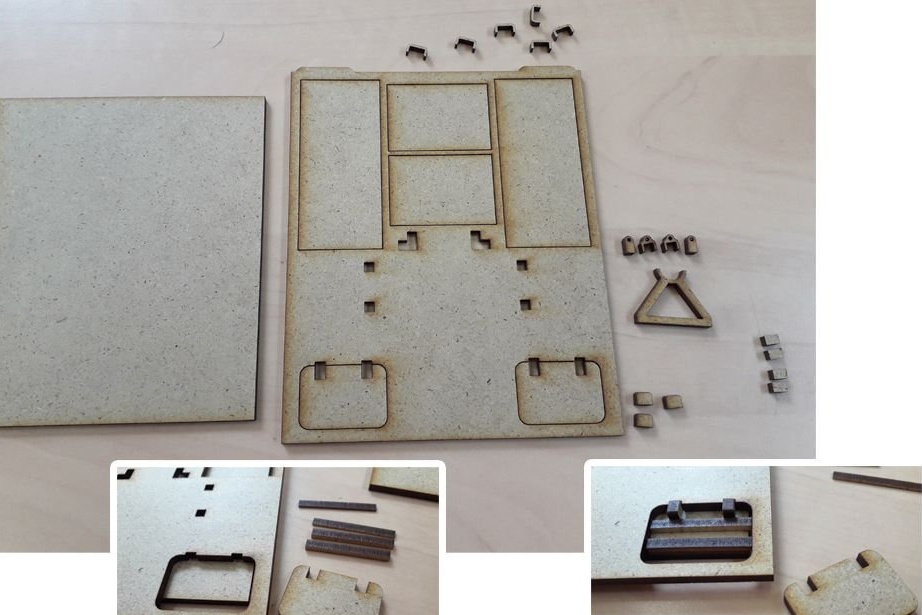
Hakbang Siyam: Ang Likuran
Ang bahaging ito ay matatagpuan sa likod ng tower at tatakpan nito ang buong elektronika.
Ika-sampung Hakbang: Ang Tore
Kinokolekta ang tuktok ng tower at side wall.
Glues ang gun mount.
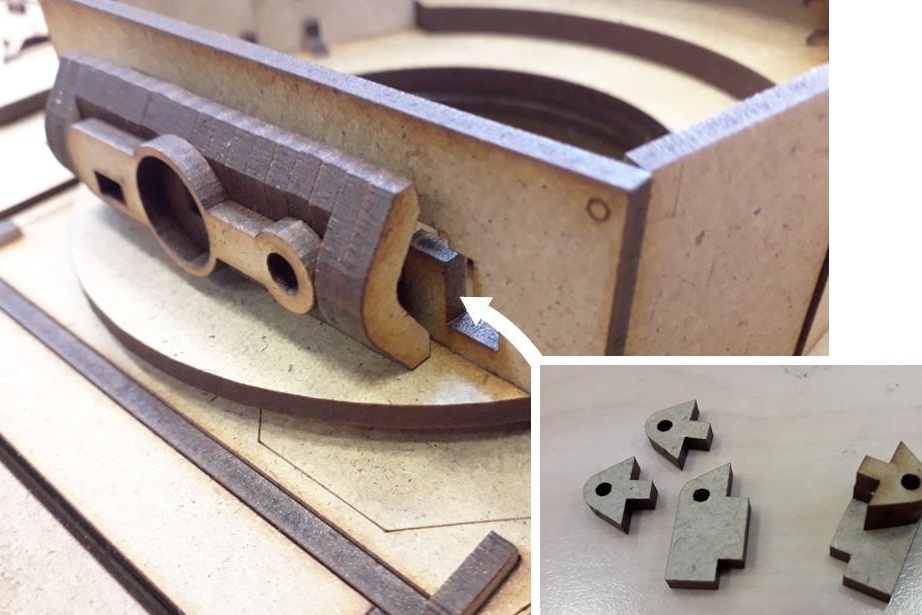
Itinatakda ang panloob na mekanismo ng pag-mount at gun.

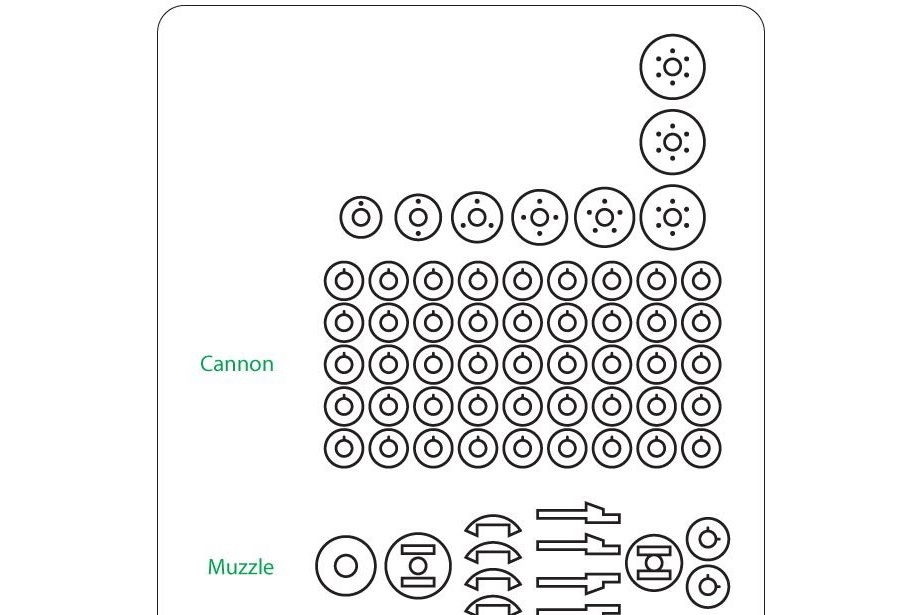
Hakbang labing-isang: baril
Nangongolekta ng baril.Ang pangunahing baril ay isang metal na pamalo. Ang natitirang mga detalye ay strung dito.

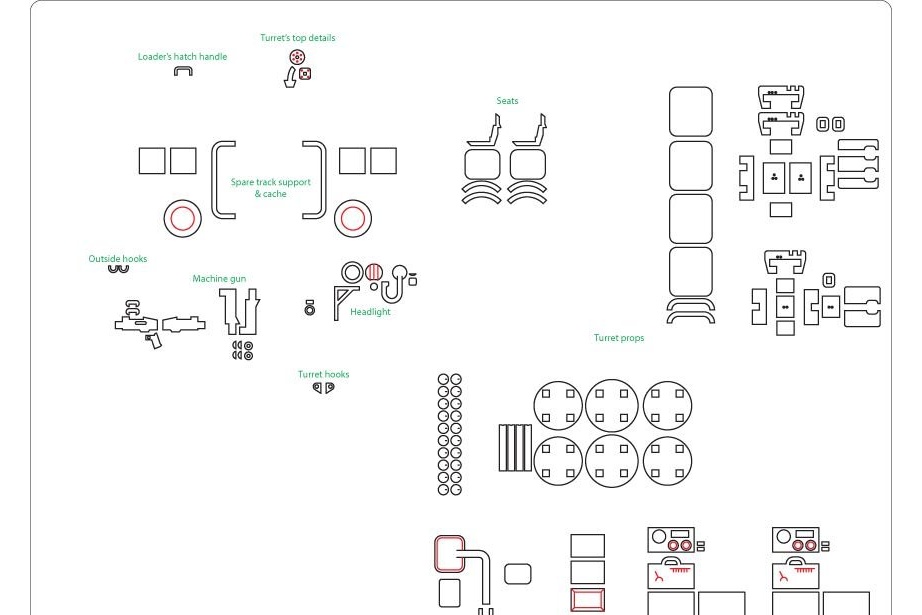
Hakbang Labing: Maliit na Mga Detalye
Nagse-secure ng maliliit na bahagi ng tangke.
Sa loob, sa kaliwang bahagi ay may isang upuan at isang machine gun, sa labas ng bariles ng isang machine gun.
Kanan sa upuan ng driver: upuan, control levers at pedals, sunroof.
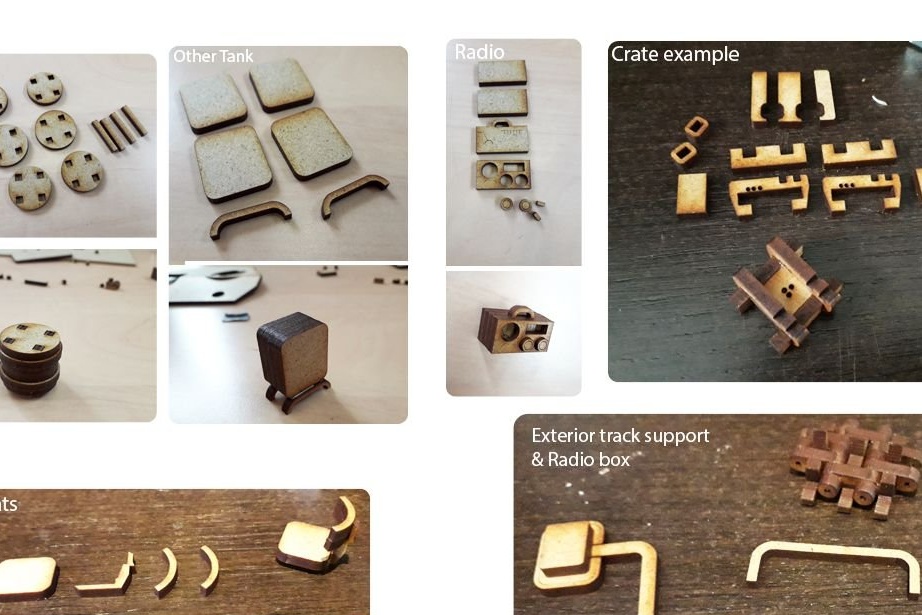
Sa labas: mga kawit, headlight, mga kahon, bala, kawad ng kawad, atbp.
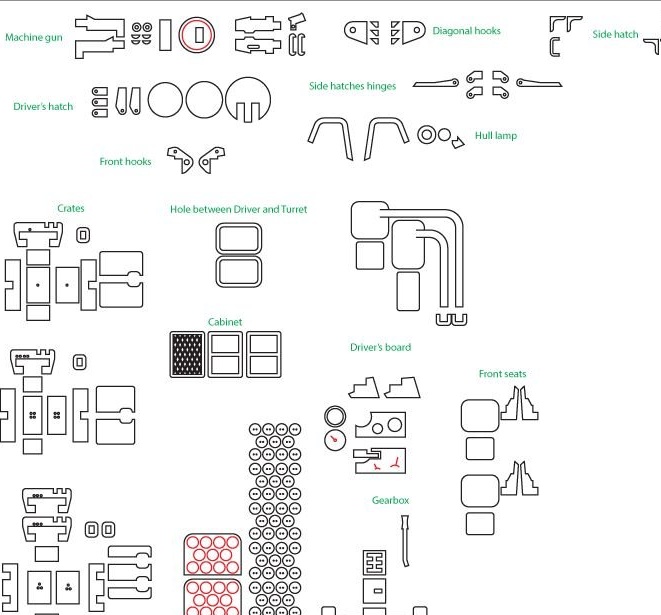
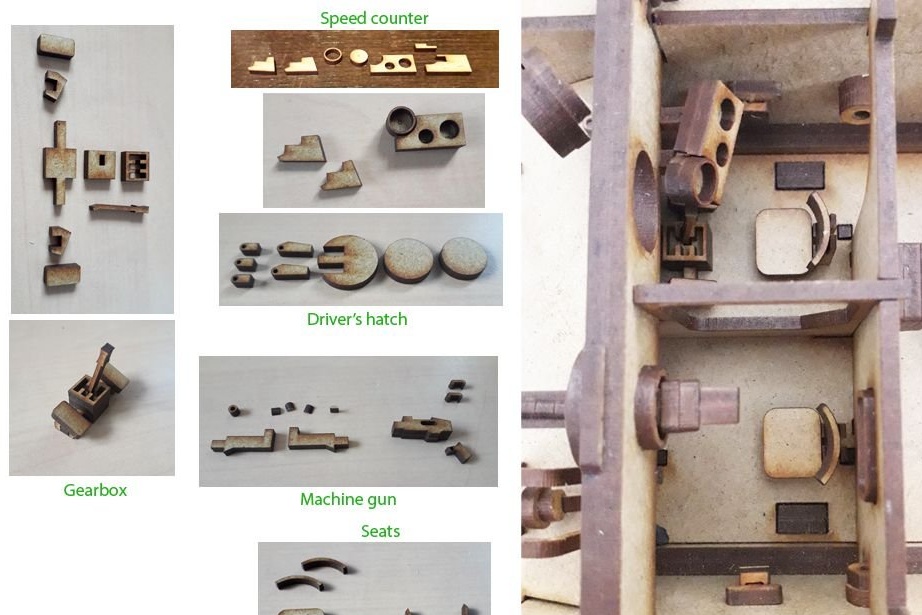

Ang isang tangke sa ilalim ng tubig ay naayos sa tore, isang walkie-talkie sa loob ng tore.

Hakbang Labintatlo: Elektronika
Mga engine engine. Nagsasagawa ng pag-install ng elektronikong bahagi ayon sa diagram.
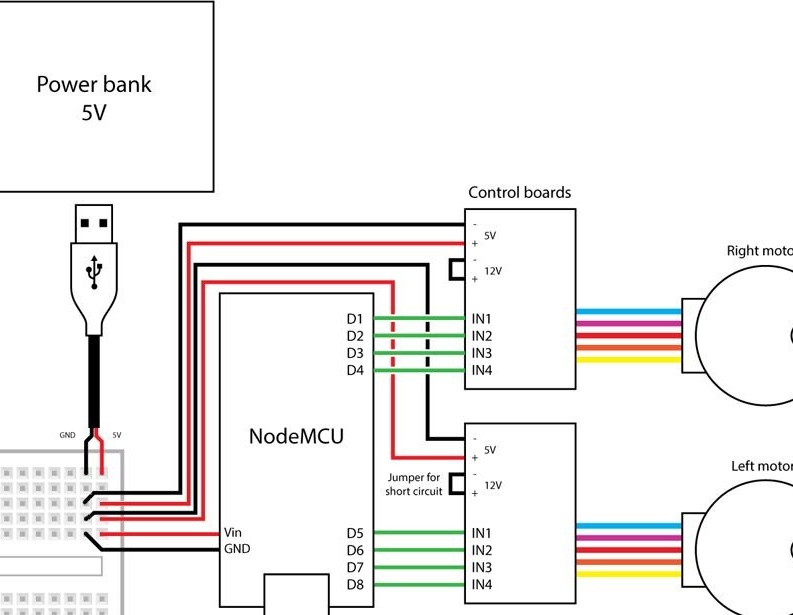

Para sa wireless control, pinili ko ang Controller ng NodeMCU. Ang modelo ay kinokontrol sa pamamagitan ng NodeMCU at ang application ng Blynk (magagamit sa Android / iOS). Nagbibigay ang app na ito ng isang ganap na napapasadyang HUD upang makontrol mula sa anuman Arduino o iOS telepono sa pamamagitan ng WiFi.
Kaya, pagkatapos i-install ang application, ang unang bagay na dapat gawin ay lumikha ng isang account.
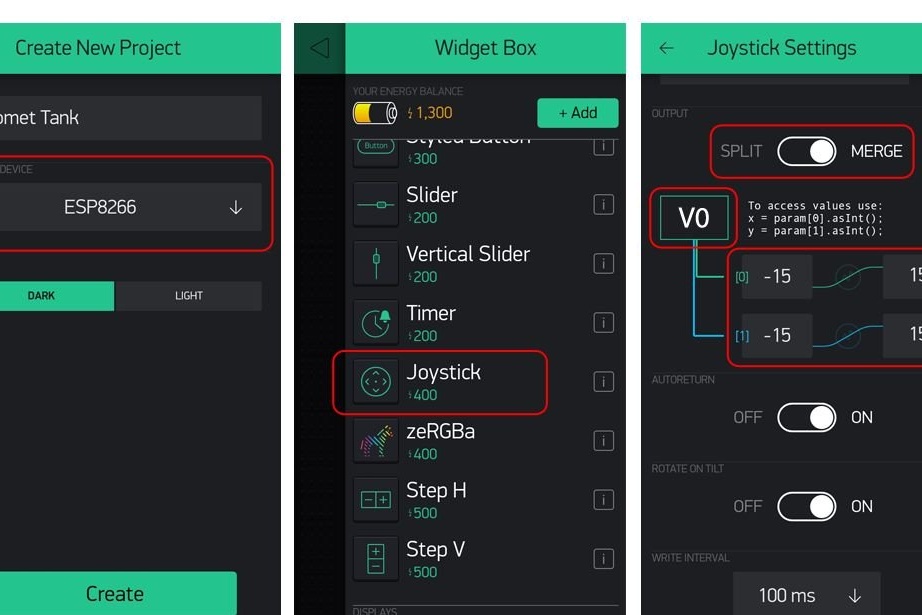
Lumikha ng isang bagong proyekto at italaga ang ESP8266 (NodeMCU chip) bilang microcontroller at itakda ang mode ng WiFi.
Sa sandaling unang makita mo ang iyong HUD, lumikha ng isang joystick. Ipadala ang impormasyon ng joystick sa virtual pin V0 ng node.
Kapag gumawa ka ng isang joystick, mag-click dito upang buksan ang mga setting nito. Sa mga posisyon ng X at Y, itakda ang saklaw mula -15 hanggang 15.
I-install ang mga aklatan.
Una, i-download ang Stepper2 library dito: https://github.com/udivankin/Stepper2
Ang aklatan na ito ay isang mahusay na pagpipilian para sa murang mga motor ng stepper, tulad ng ginamit ng master. Mas mahusay na namamahala sa mga phase ng engine at nagbibigay ng mas mahusay na metalikang kuwintas. Matapos i-download ang .zip file, i-install ito mula sa Arduino software: Sketch> Isama ang Library> Idagdag .ZIP Library ... at piliin ito.
Pagkatapos, kung hindi mo pa kailanman sinaktan ang NodeMCU, kailangan mo ng isang computer upang makilala ito. Ang Arduino IDE ay may isang tagapamahala ng board kung saan naka-install ang tamang driver.
Kopyahin ang sumusunod na linya:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonBuksan ang mga setting at i-paste ang mga ito sa mga URL. I-save ang mga setting at pumunta sa manager ng controller sa Mga Tool> Lupon> Boards Manager. Ang ESP8266 card ay dapat na naroroon sa pagtatapos ng listahan. Pinili ng wizard ang bersyon 2.5.0 kasama ang IDE sa 1.8.9.
Kailangan mo rin ang library ng Blynk, na matatagpuan sa Sketch> Isama ang Library> Pamahalaan ang mga aklatan ... at pagkatapos ay hanapin ang Blynk sa larangan ng paghahanap.
Pumunta sa mga setting ng proyekto at magpadala ng isang token sa iyong address, na kung saan ay isang malaking string na nagpapahintulot sa iyong telepono na makilala ang NodeMCU kapag naka-on. Kopyahin ang token mula sa iyong kamakailang natanggap na mail at i-paste ito sa array ng auth.
Ngayon ay maaari mong mai-install ang firmware.
Comet.ino
Handa na ang lahat, ngayon masisiyahan ka sa iyong trabaho.