
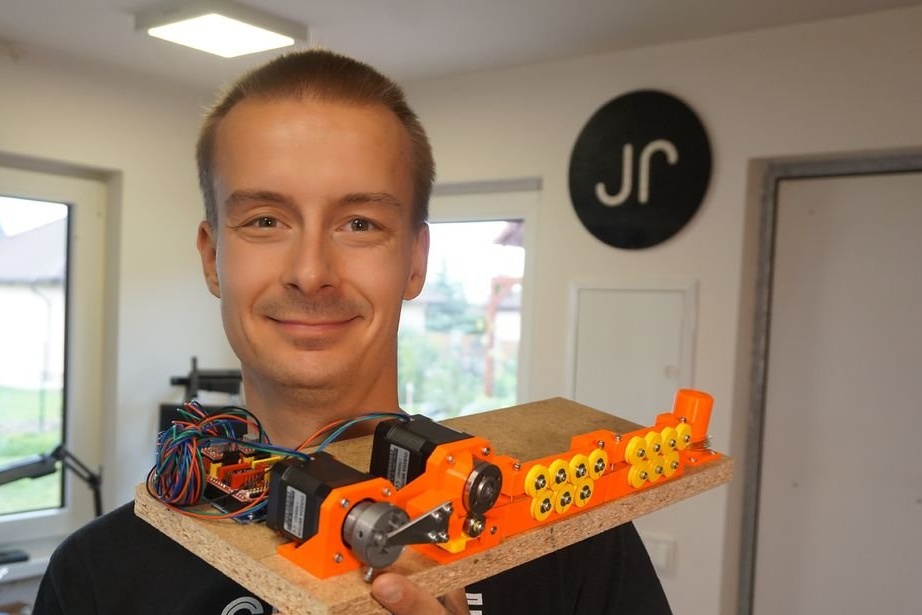
Ang isang kagiliw-giliw na aparato ay naimbento at ginawa ng Master, ito ay isang patakaran ng pamahalaan para sa baluktot na wire ng anumang hugis. Ang paggawa ng mga bukal ay isa sa mga tampok nito. Ang makinang ito ay may kakayahang yumuko 0.8 / 0.9 / 1 mm wire sa anumang 2D na hugis.
Ang pangunahing layunin ng paggawa ng makina na ito ay upang mai-automate ang proseso ng baluktot. Ang iba pang mga homemade machine ay hindi masyadong tumpak, at ang kanilang mga bends ay may isang medyo malaking radius.
Ang pangalawang gawain ay gawin itong simple hangga't maaari gamit ang mga karaniwang magagamit na mga bahagi at sangkap. Ang ilang mga bahagi ng makina ay nakalimbag sa isang 3D printer, at ang mga bahagi ng metal ay maaaring mabili sa tindahan.
Ano ang master para sa tulad ng isang makina para sa? Siya ay interesado sa paggawa ng mga LED figure, snowflakes, bituin, bulaklak, atbp. Sa kanilang paggawa ng magkatulad na mga bahagi mula sa kawad ay kinakailangan, at ang makina na ito ay mapadali ang kanilang paggawa.
Manood tayo ng isang maikling video na may isang halimbawa ng aparato.
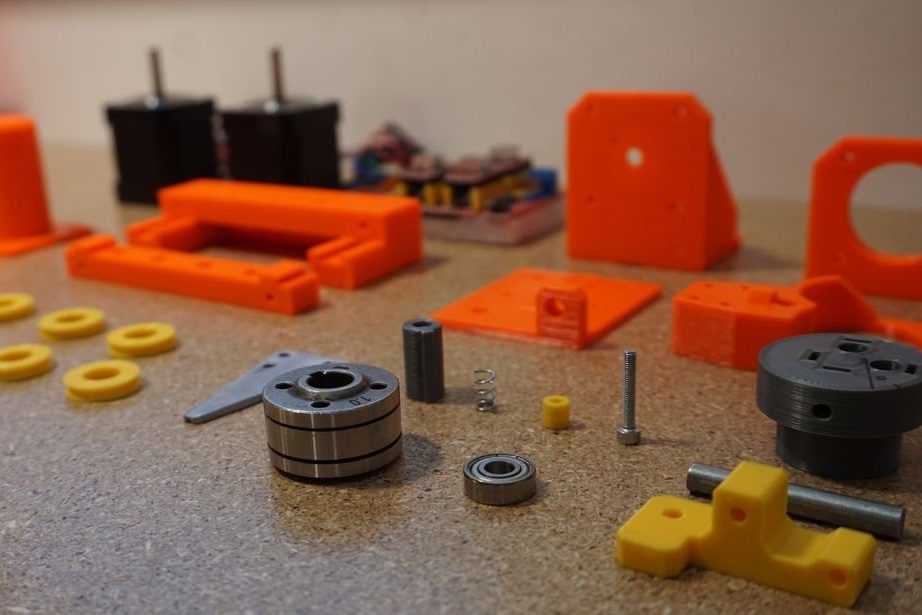
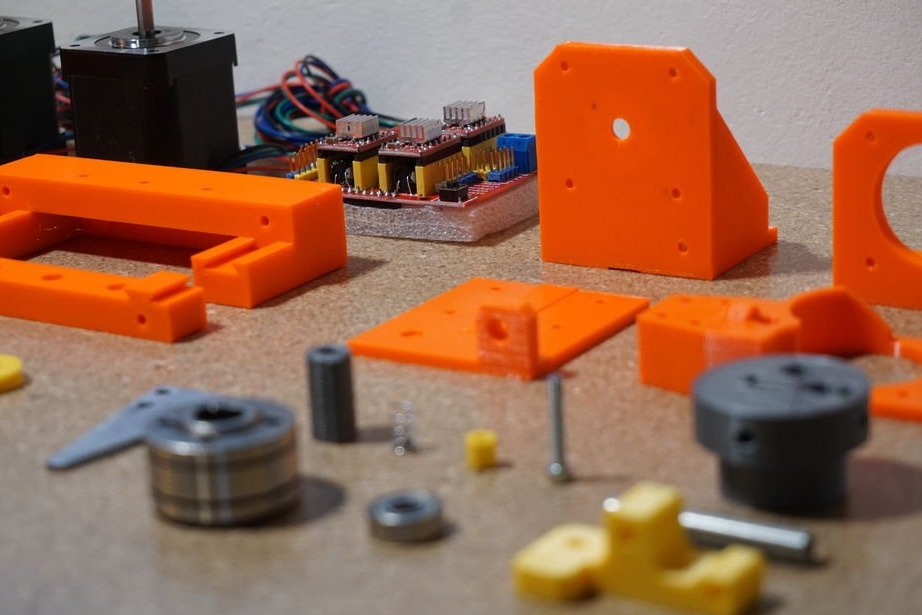
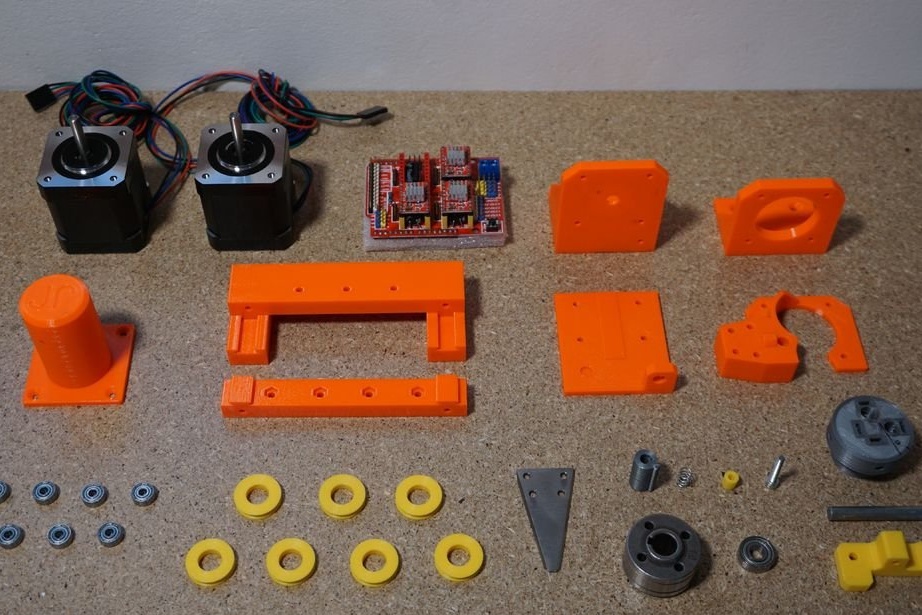
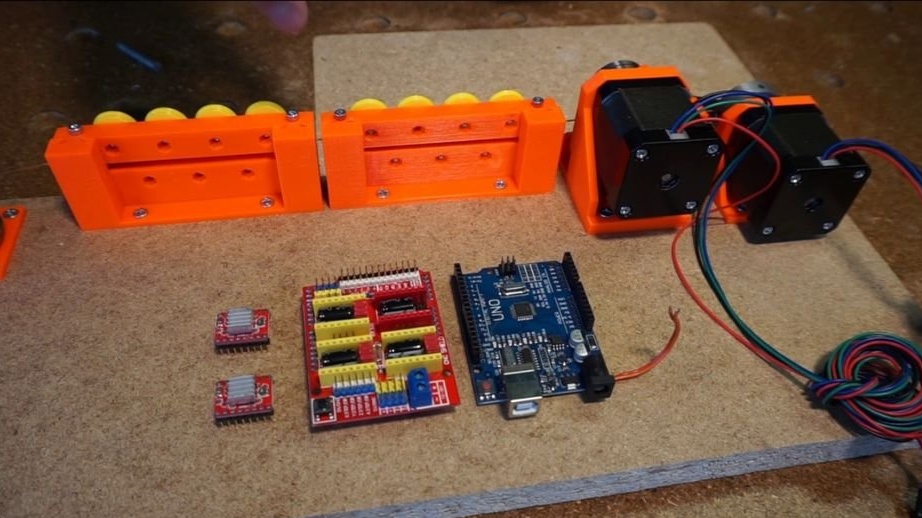
Kaya, para sa paggawa ng tulad ng isang makina, ginamit ng master ang sumusunod
Mga tool at materyales:
-3D detalye (maaaring mai-download ang mga file ng pag-print dito);
-Fastener;
-Arduino UNO;
-Expansion board para sa Arduino UNO;
-Step driver A4988 -2 mga PC;
-Step engine NEMA17 -2 mga PC;
-12V 3A supply ng kuryente;
- mekanismo ng feed ng wire;
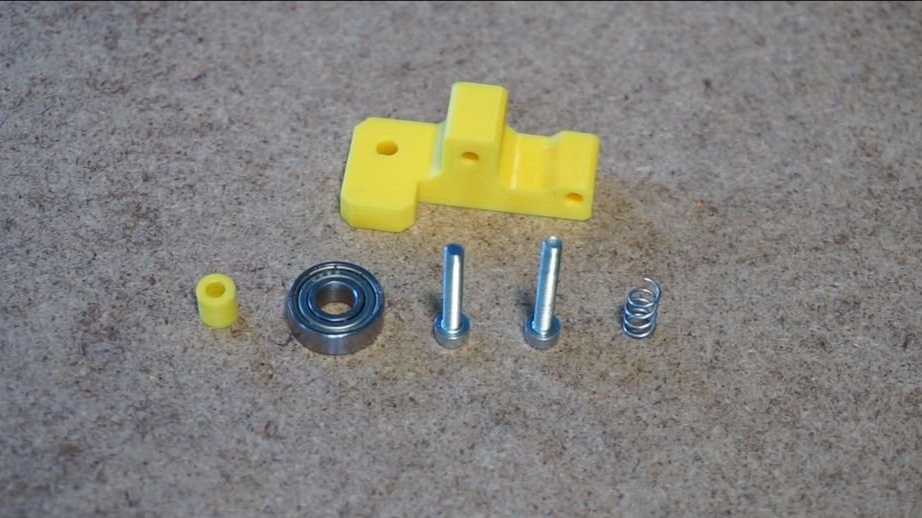
-Steel spring 4x6 mm;
- Nagbibigay ng 3x10x4 mm;
-Bearing 6x15x4 mm;
-6 mm bakal na baras;
- Bakal na bakal na sheet na 2 mm;
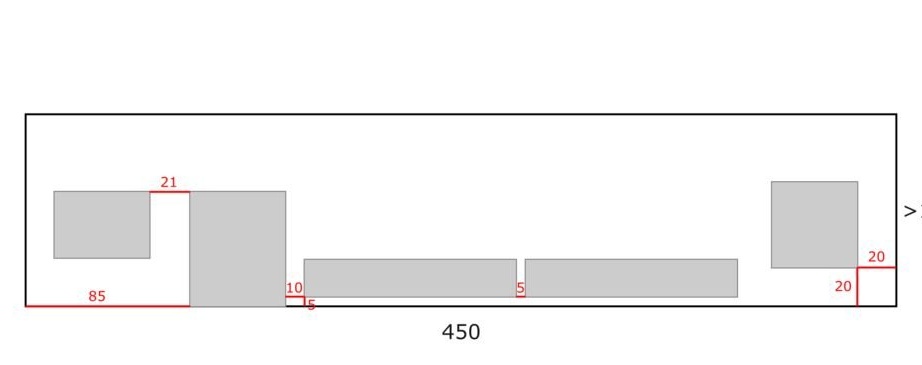
-Wood board para sa base 450x100 mm;
- distornilyador;
-Gon;
Hakbang Una: Paano Ito Gumagana
Tingnan natin kung paano gumagana ang makina (mula kanan hanggang kaliwa).
Holder ng spool - hawak nito ang spool ng wire para sa pagproseso ng makina.
Rectifier - isang hanay ng 7 rollers upang ang wire ay hangga't maaari. Ang pagtatrabaho sa tuwid na kawad ay mahalaga. Iyon ang dahilan kung bakit ang dalawang mga rectifier.
Broach - maaari kang makahanap ng isang katulad na mekanismo sa iyong 3D printer. Ang isang hanay ng mga gears ay kumukuha ng wire mula sa reel sa pamamagitan ng mga roller at itinulak ito sa baluktot na ulo. Ang mekanismo ng feed ay dapat magkaroon ng sapat na presyon ng wire upang hindi ito madulas. Marami pa sa susunod.
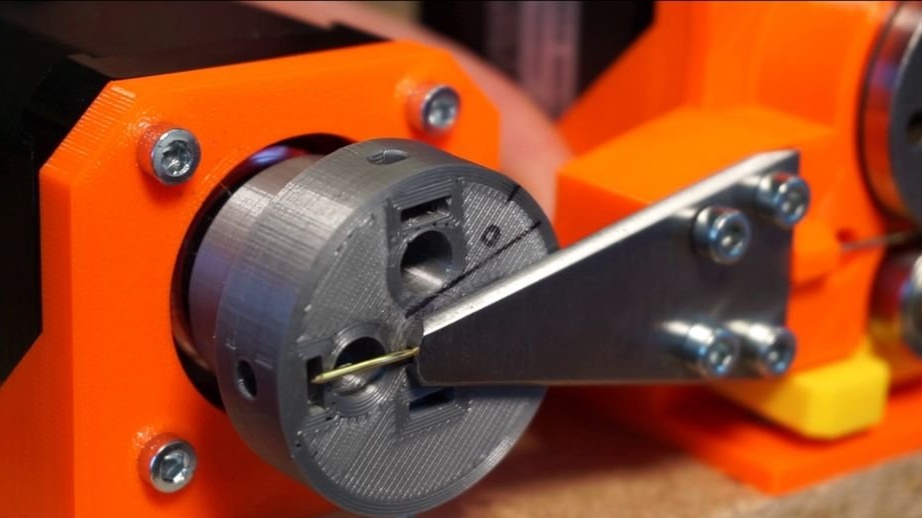
Bending machine - yumuyuko ang kawad sa isang naka-program na form.
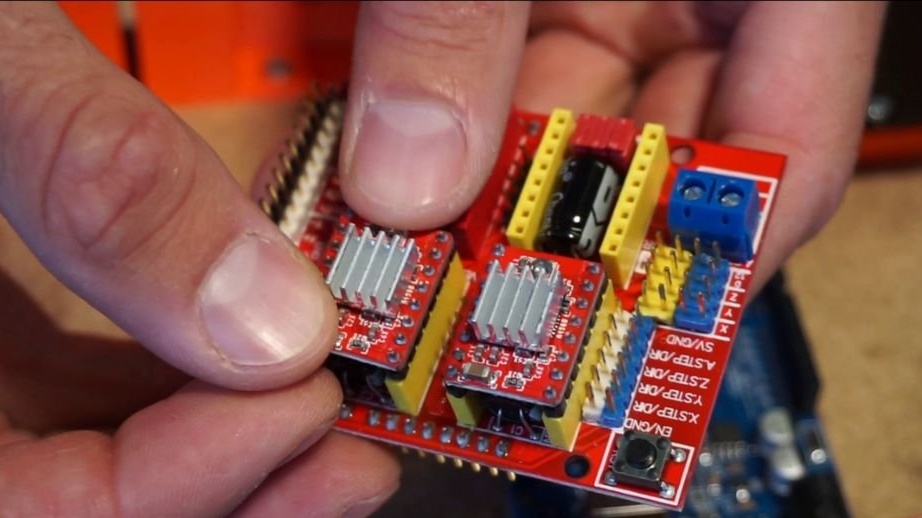
Ang lahat ng ito ay kinokontrol ng isang Arduino UN na may isang kalasag sa CNC.Ang isang utos ay ipinadala sa Arduino mula sa computer at isinalin ito sa mga utos para sa mga stepper motor.

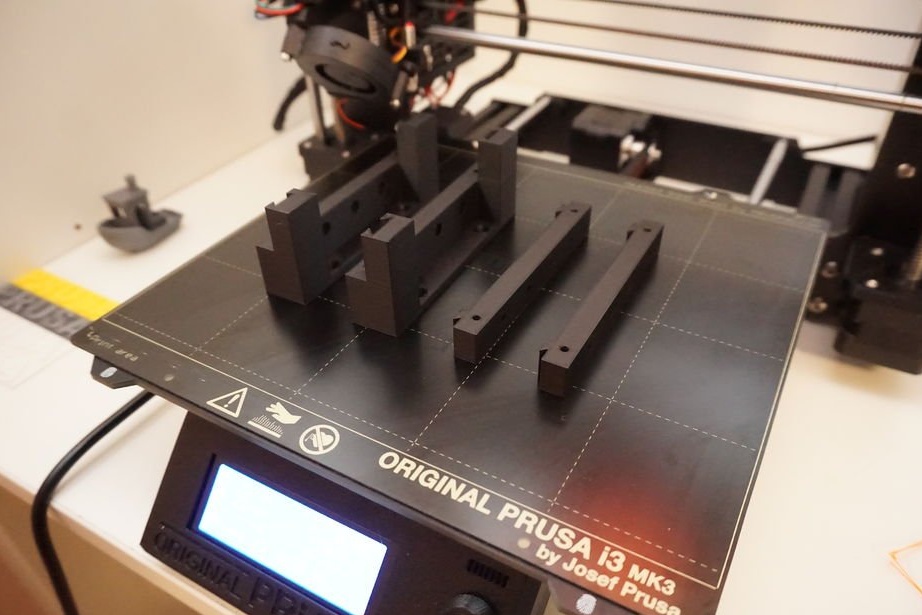
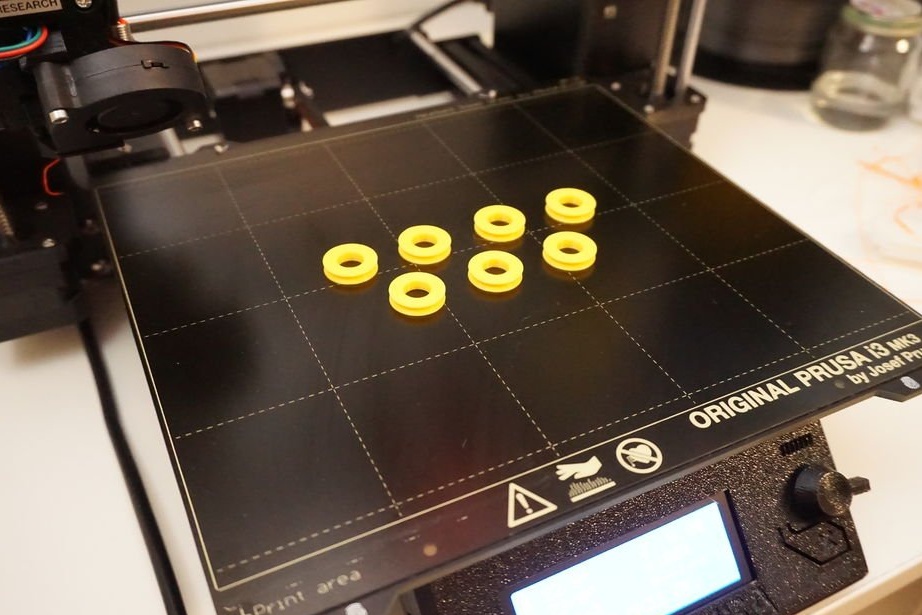
Hakbang Dalawang: Mga Bahagi ng Pag-print
Kailangan mong mag-print ng mga sumusunod na detalye at sa sumusunod na dami (upang maiwasan ang pagkalito, ang orihinal na teksto):
Bender
Pinuno ng tool
Frame ng motor
Feeeder
Frame ng motor
Bottomang frame
Patnubay sa wire
Karwahe ng karwahe ng Idler
Idler spacer ng gear
Pagpapakain ng gear spacer
Bending plate (template)
Mga roller ng straightener (2x)
Bed frame (2x)
Nangungunang frame ng gears (2x)
Roller (14x)
Holder ng spool
Layer taas kapag nagpi-print ng 0.15 mm. 40% pagpuno. Ang pag-print ay tumatagal ng 2 araw.
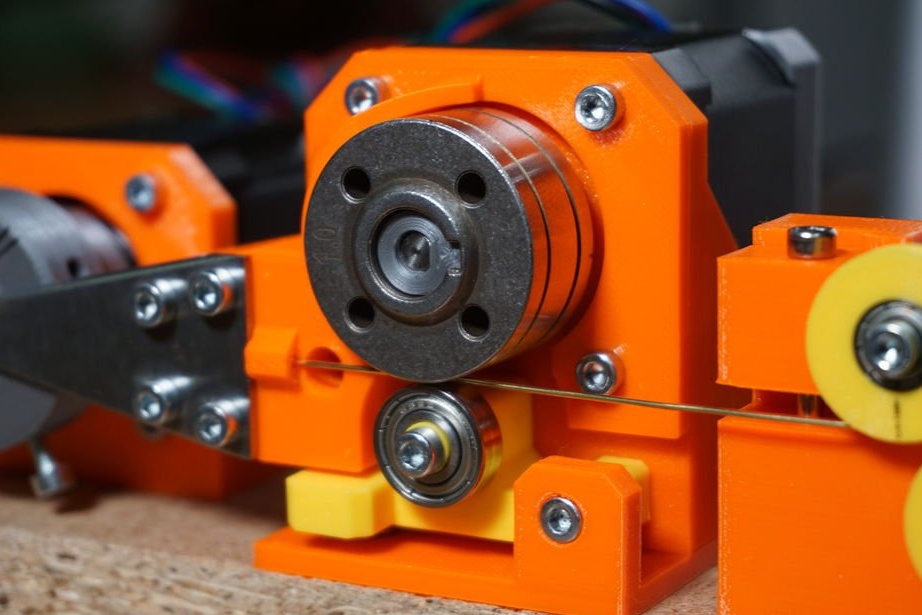
Hakbang Tatlong: Bending Machine
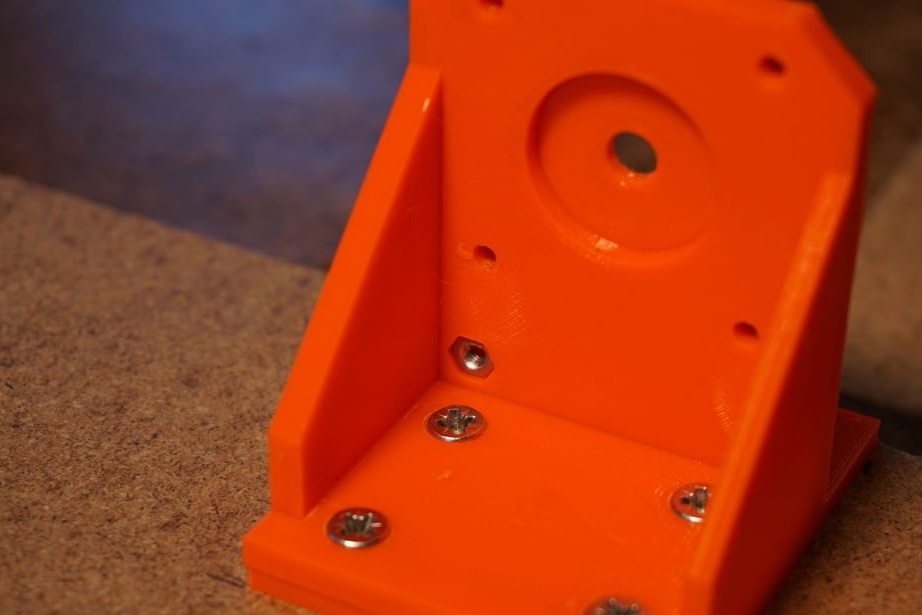
Ang master ay nag-screw ng dalawang frame sa base. Mahalagang i-install ang parehong mga frame tulad ng ipinapakita sa pagguhit.
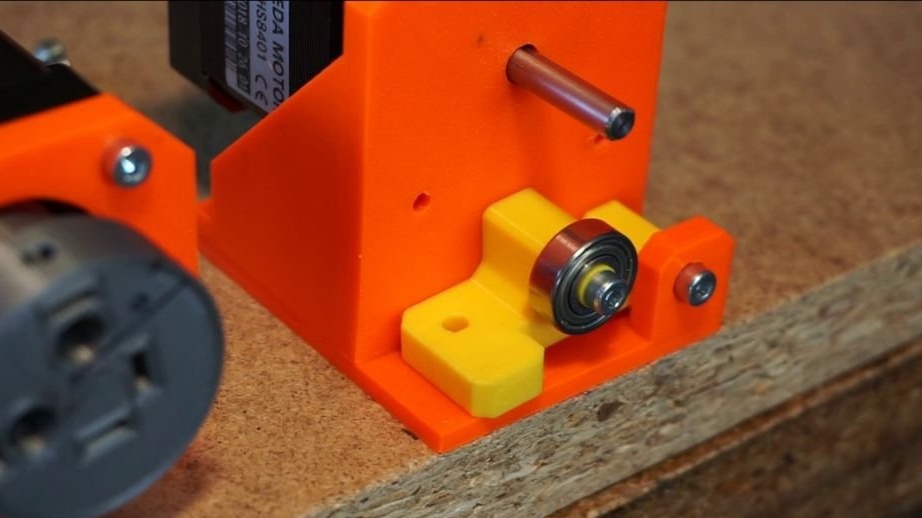
Secure ang stepper motor sa frame. Secure ang ulo sa baras ng motor.


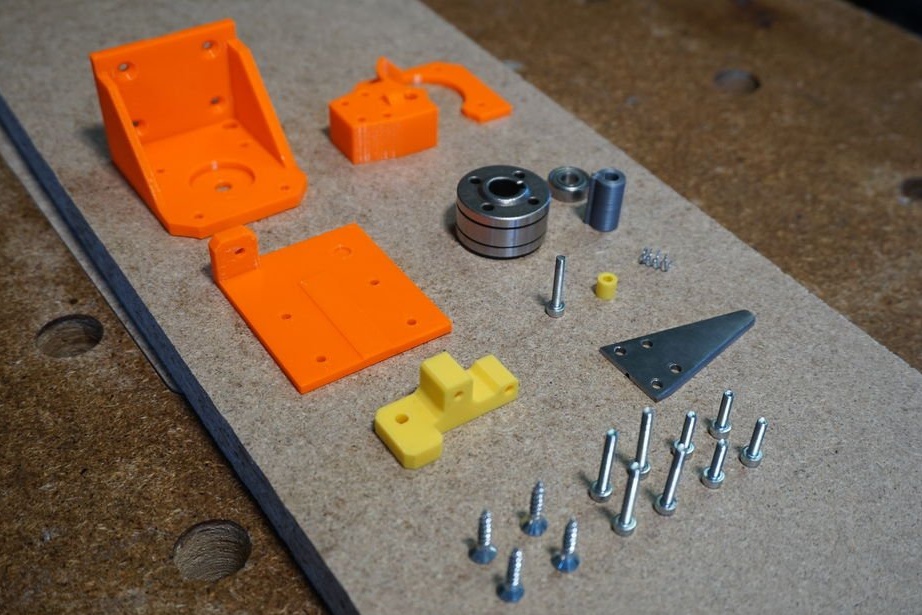
Hakbang Apat: Broach
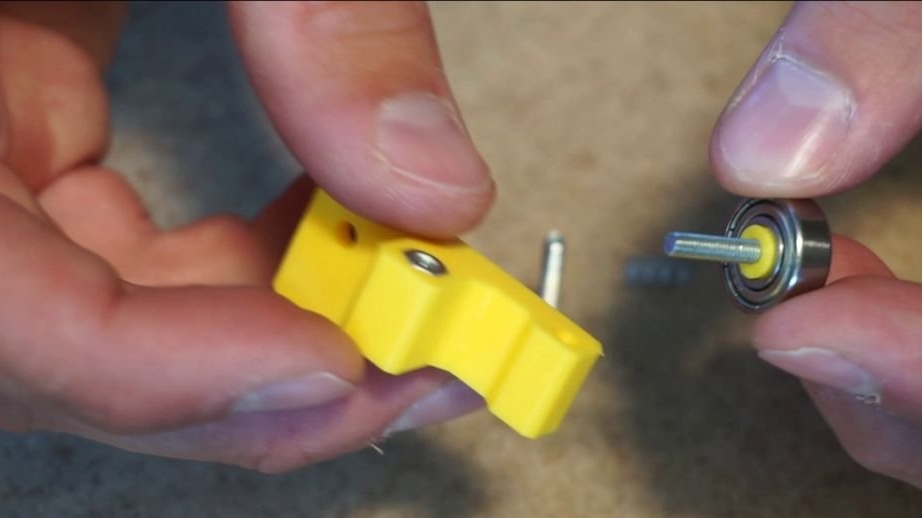
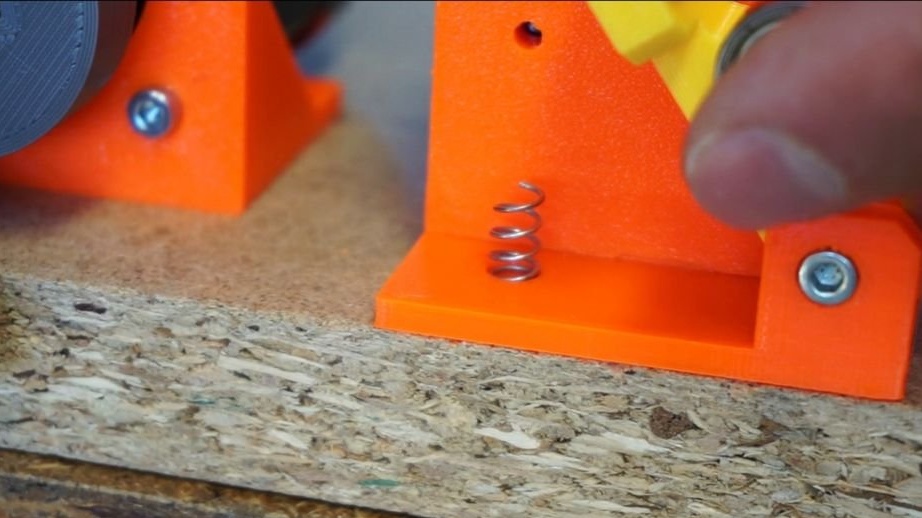
Ang frame ay naka-install na, kaya ang unang hakbang sa paglikha ng isang mekanismo ng feed ay ang pagbuo ng isang karwahe para sa intermediate gear, na pipindot ang wire sa mekanismo ng feed. Alisin ang plastic gasket sa loob ng 6x15x4 mm tindig. I-install ang tindig sa M3x20 bolt. I-install ang M3 nut sa karwahe at i-tornilyo ang tindig sa bolt. Tiyaking malayang umiikot ang tindig. Ipasok ang pangalawang M3 nut sa engine frame (gilid ng engine sa ibabang kaliwang sulok) at i-screw ang karwahe sa pamamagitan ng maliit na bracket gamit ang M3x20 bolt. Huwag papansinin ang bolt; dapat malayang gumalaw ang karwahe. Itaas ang karwahe at ipasok ang tagsibol sa butas sa ibaba nito.
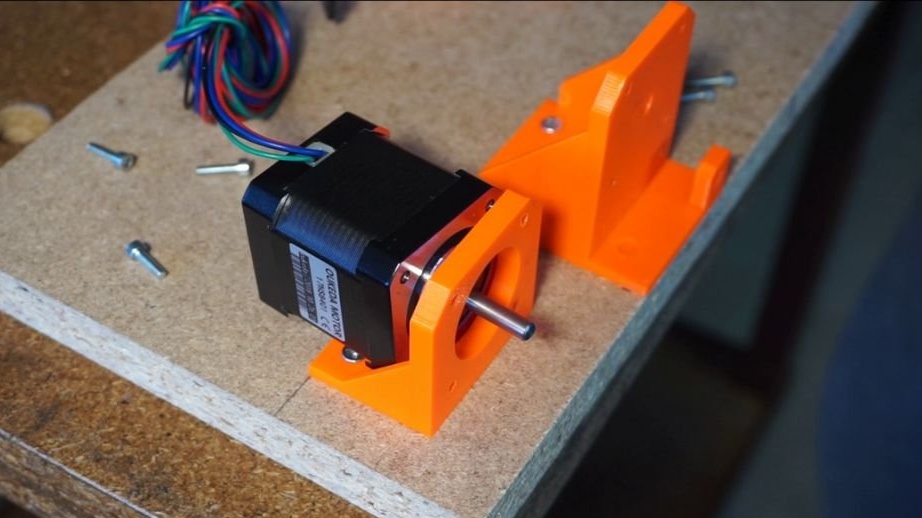
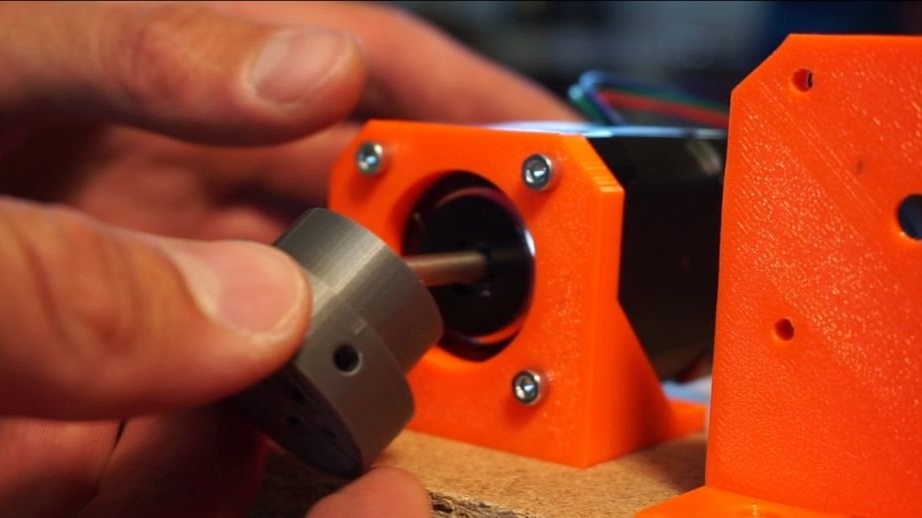
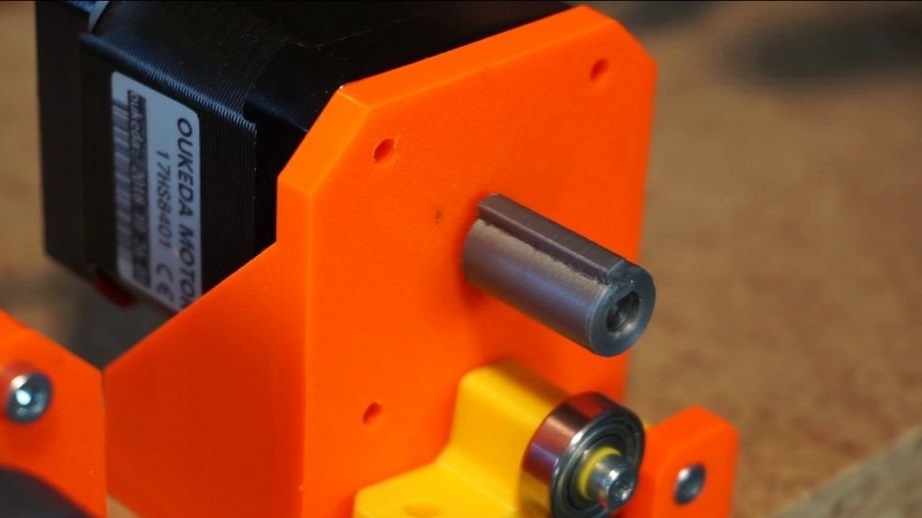
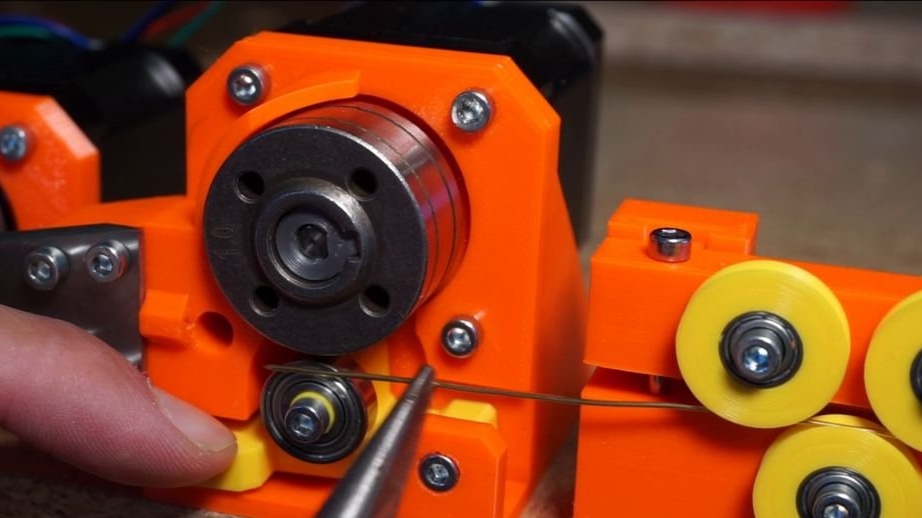
Kumuha ng pangalawang motor ng stepper at i-install ito sa frame ng motor. Huwag ka pa mag-screw. Pindutin ang spacer ng mekanismo ng feed sa motor shaft at i-install ang mekanismo ng feed.
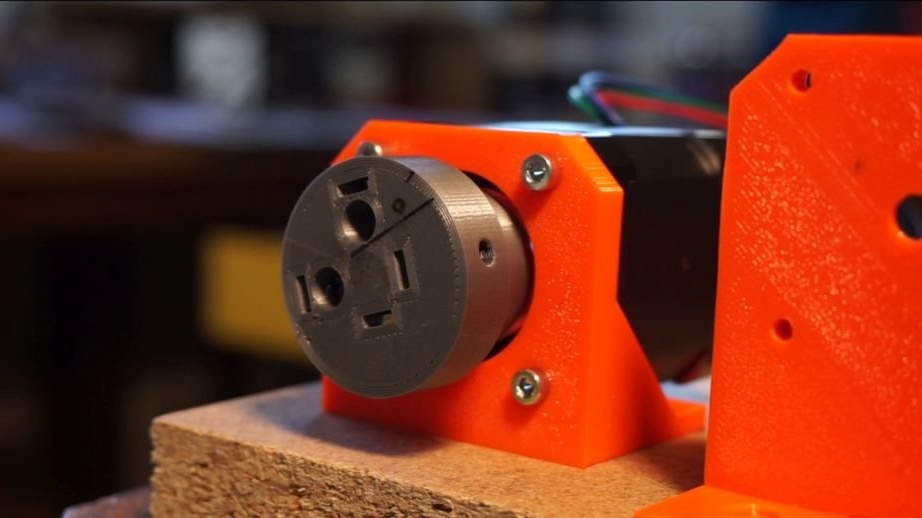
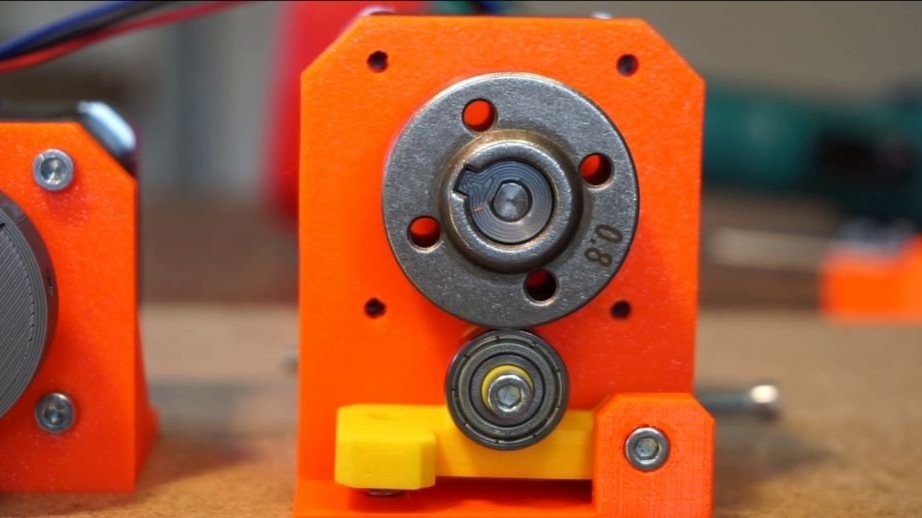
Ang mekanismo ng feed na ginagamit ng master ay kinuha mula sa isang MIG welding machine. Ang mekanismo ay may dalawang recesses sa coil. Isa para sa 0.8 mm wire at isa para sa 1 mm wire. Hindi tulad ng mga gears (dati nang sinubukan ng master na pakainin ang wire sa kanila), ang mekanismo na ito ay hindi nag-iiwan ng mga bakas sa kawad.
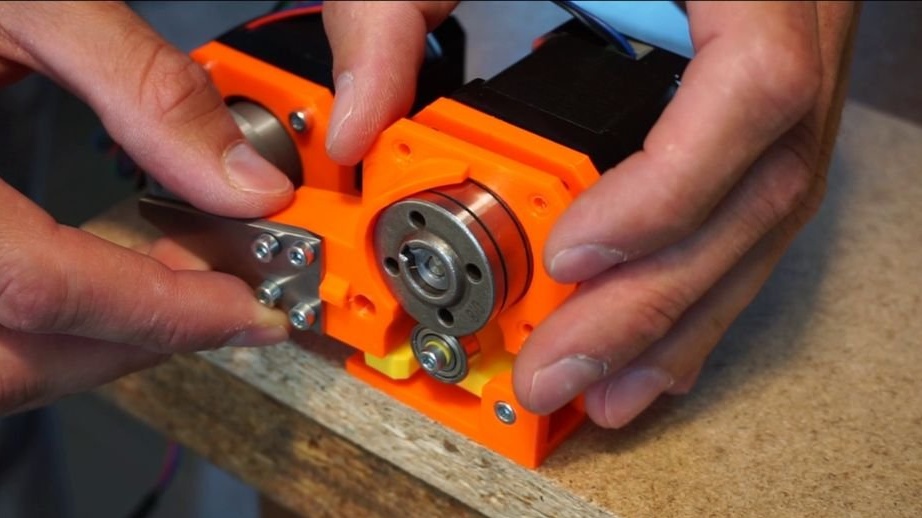
Ang aparato ng feeder at baluktot ay konektado sa pamamagitan ng isang baluktot na plato - isang makapal na metal plate na 2 mm na may maliit na uka sa likod na dingding, na pinapakain ang kawad nang direkta sa gitna ng baluktot na ulo para sa perpektong baluktot. Para sa pag-print, mayroong isang plastik na baluktot na plato na gumagana nang mahusay, ngunit mabilis na nagsusuot ng mabilis at nangangailangan ng madalas na kapalit. Maaari mo itong gamitin, o maaari kang gumawa ng isang metal plate sa ito.
Susunod, kunin ang plastic na bahagi ng gabay ng wire at i-install ang apat na M3 nuts sa mga butas sa likuran nito. Ngayon i-tornilyo ang baluktot na plato gamit ang M3x20 bolts. Ilagay ang gabay sa wire sa harap ng frame ng engine ng mekanismo ng feed at mai-secure ito sa engine na may apat na M3x12 bolts. Ayusin ang posisyon ng baluktot na plato. Dapat itong eksaktong nasa gitna ng baluktot na ulo.
Handa na ang broach. Kung mayroon kang isang tuwid na wire, maaari mong gamitin ang kawad ngayon. Kung hindi, kailangan mo ng isang rectifier.





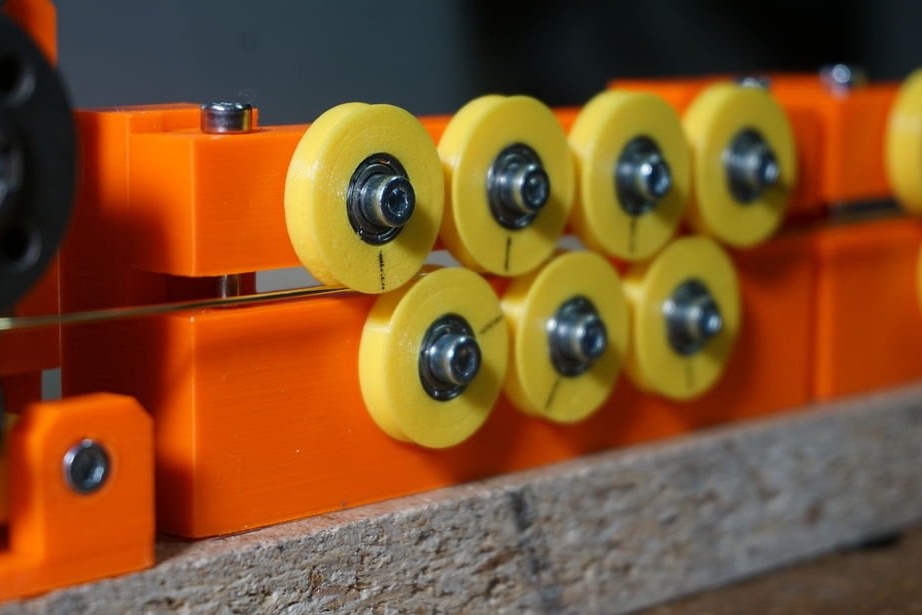
Hakbang Limang: Broach
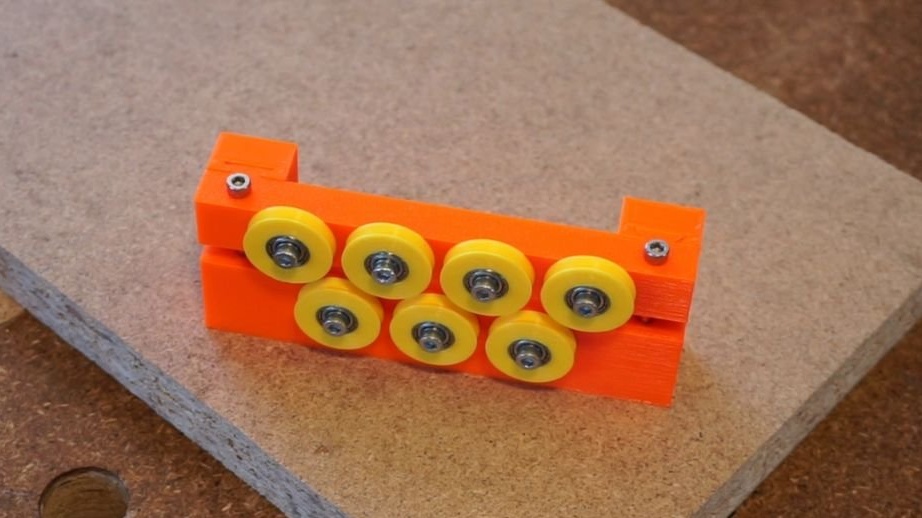
Karaniwang ibinibigay ang kawad sa form ng coil. Upang yumuko ang kawad, kailangan mo munang ituwid ito. Ang rectifier ay binubuo ng 7 rollers (4 sa tuktok at 3 sa ilalim), na maaaring pindutin laban sa bawat isa upang matiyak ang tamang pag-igting ng wire. Pinipigilan din nito ang pag-twist ng kawad habang baluktot.
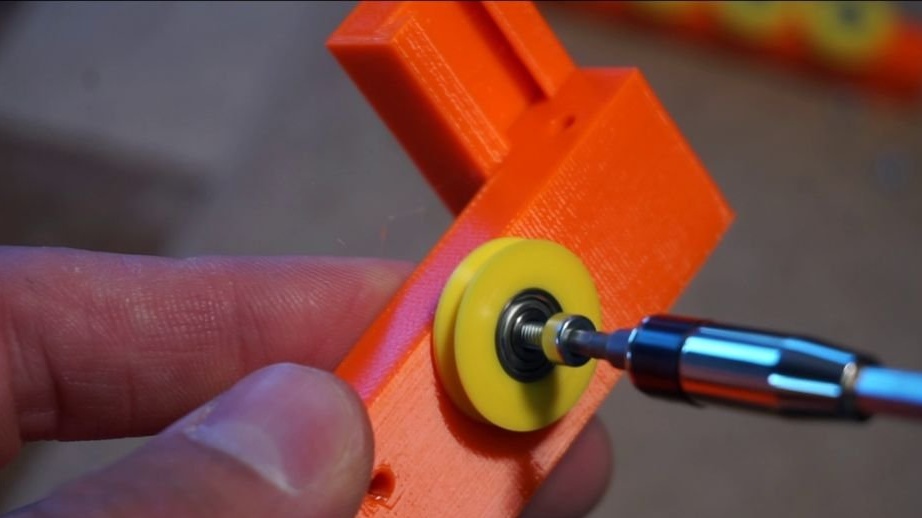
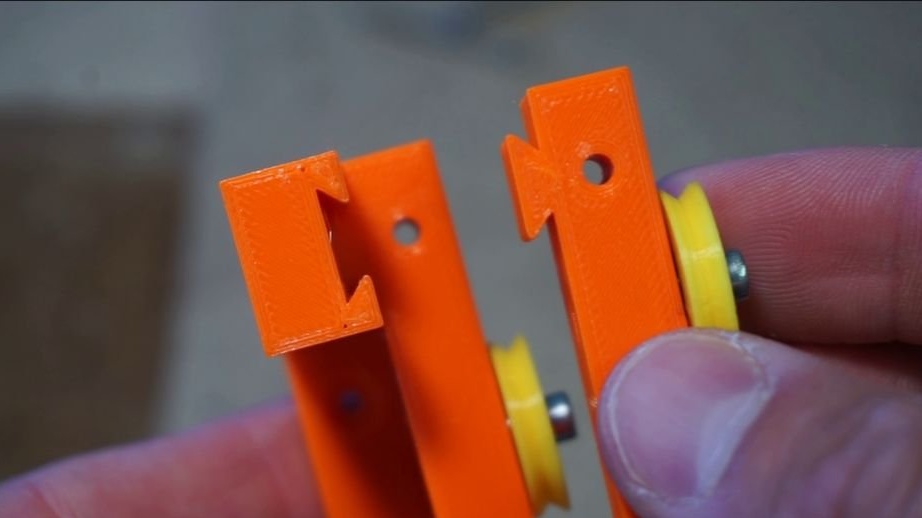
Simulan ang pagpupulong sa mga roller casters. Una kailangan mong pindutin ang nagdadala ng 3x10x4 mm sa pabahay ng plastic roller. Ipasok ang bolero ng M3x12 sa isang panig at ang tagapaghugas ng M3 sa kabilang panig ng roller. Ang tagapaghugas ng pinggan ay maiiwasan ang alitan ng gulong sa frame. I-screw ang lahat ng mga roller sa mas mababa at itaas na frame. Ikonekta ang parehong mga frame. I-secure ang mga frame na may dalawang M3x40 bolts.
Maaari kang makatipid ng kaunting pera sa mga bearings ng roller. I-print ang Straightener_RollerNoBearing bahagi sa halip ng Straightener_Roller. Ngunit ang pagganap ay magiging isang maliit na mas masahol pa.
Para sa mas mahusay na mga resulta, gumamit ng 2 straightener sa isang hilera.




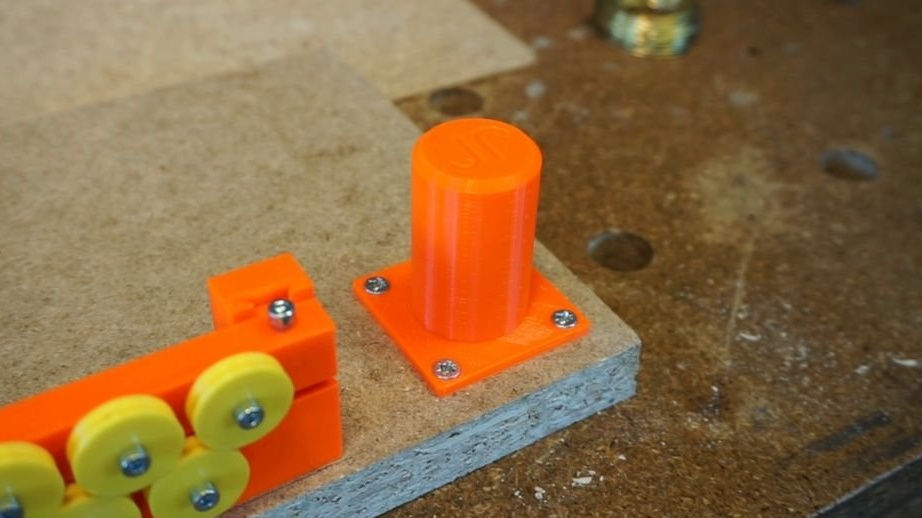
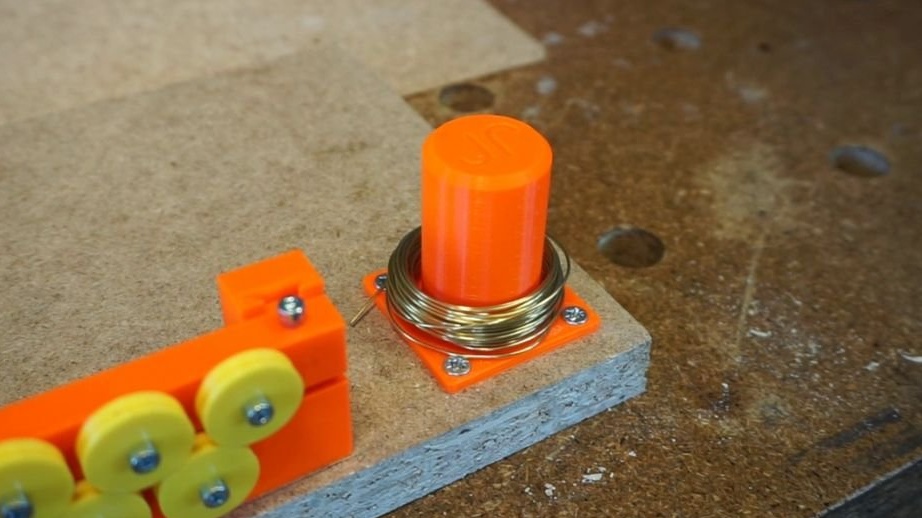
Hakbang Anim: May hawak ng Coil
Ang may hawak ng spool ay isang simpleng silindro na may hawak na kawad at pinapayagan itong makapagpahinga mula sa dumi. Screw ito sa base na may apat na 3x16 screws.
Hakbang pitong: kumonekta
Una, ang baluktot na wire ay dapat na pinakain sa makina. Gumagamit ang master ng 0.8-1mm wire wire sa hugis ng isang coil.
Ang kawad ay mula sa likid sa pamamagitan ng mga roller. Dumikit lamang ang wire sa pagitan ng mga roller. Pagkatapos ay dumaan siya sa broach.Ayusin ang posisyon ng mekanismo ng feed upang ang kanal ay flush na may ibabaw ng gabay ng wire. Pindutin ang pingga sa intermediate gear at itulak ang wire sa pamamagitan ng feeder sa baluktot na plato. Ilabas ang pingga at hayaang pindutin ito laban sa mekanismo ng feed. Maaari mo na ngayong mag-scroll nang manu-mano ang mekanismo ng feed upang itulak ang wire sa baluktot na ulo. Maingat na ayusin ang pag-igting sa mga roller sa pamamagitan ng higpitan ang mga bolts. Ang mga roller ay hindi dapat iikot nang malayang, ngunit ang wire ay dapat na gumalaw nang maayos.
Pangalawa elektronika Dapat ding konektado ang controller. Ginagamit ng master ang klasikong Arduino UNO kasama ang CNC at dalawang driver ng motor ng stepper A4988. Ang motor ng feed ay konektado sa Z axis, at ang baluktot na ulo ng motor ay konektado sa X axis.Ang mga driver ay na-configure para sa pinakamataas na posibleng katumpakan - lahat ng 3 mga jumpers sa ilalim ng mga hakbang na driver ay nakapasok. Ang lahat ay dapat na konektado sa isang 12V 3A power supply.

Hakbang Walong: firmware
Ngayon ay maaari mong subukang simulan ang makina. Ginagamit ng Master GRBL kasama cncjs. Ang mga ito ay dinisenyo upang gumana sa isang milling machine, ngunit mahusay na gumana para sa anumang uri ng CNC. Ang GRBL ay ang firmware na kailangan mong i-install sa Arduino UNO. Mayroong isang mahusay na client ng cncjs para sa pagtatakda ng mga parameter. I-install ang GRBL sa Arduino at cncjs sa iyong computer.
Pagkatapos ng pag-install, kailangan mong kumonekta sa makina at suriin ang operasyon nito sa pamamagitan ng pagpindot sa mga pindutan Z +/- o X +/-.
Ngayon kailangan mong i-calibrate: 10 mm = Z10 $ 102 = 34 $ 110 = 1600 $ 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
Ito ay isang hanay ng mga halaga na matukoy kung paano i-convert ang numero na ipinahiwatig sa code sa paggalaw ng engine. Halimbawa, kung itinakda mo ang Z axis sa 30, talagang nangangahulugan ito na itulak niya ang 30 mm ng kawad sa pamamagitan ng feeder.
Nalaman namin ang pagkakalibrate, ngayon kailangan mong itakda ang baluktot na ulo sa posisyon ng zero.
Ang paggalaw ng baluktot na ulo ay natutukoy ng kilalang nakapirming posisyon ng ulo ng baluktot. Sa kasong ito, ito ang posisyon kung saan ang baluktot na pin sa ulo ay nakaharap sa kaliwa. Tingnan ang larawan.
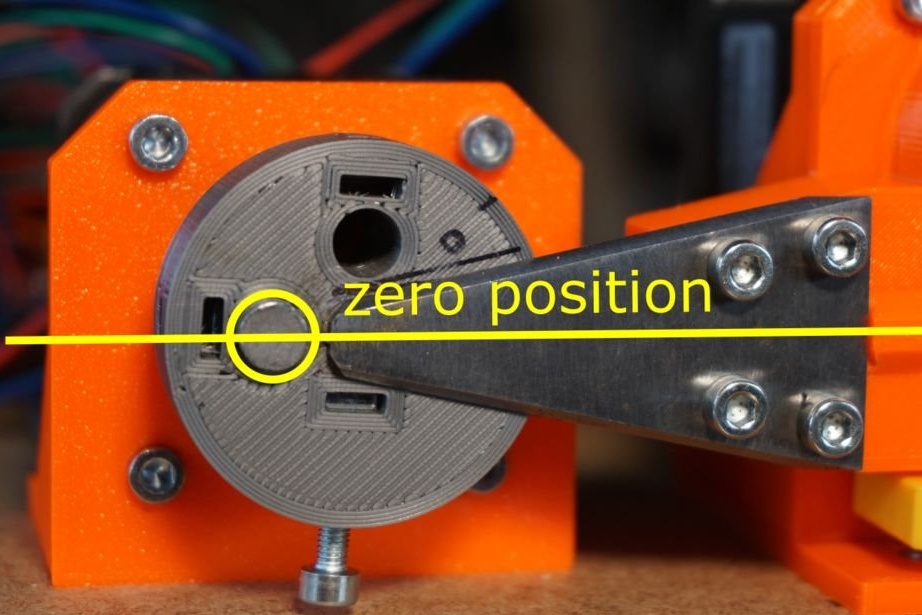
Maipapayo na tandaan ang zero na posisyon na ito sa ulo upang maibalik ito sa parehong posisyon. Hindi na kinakailangan para sa mekanismo ng feed upang matukoy ang zero na posisyon, sapagkat palaging gumagalaw ito na nauugnay sa kasalukuyang posisyon.
Ngayon tingnan natin ang isang halimbawa ng Gcode. Mukhang ganito:
G91
G1 Z1
G90
G1 X2
G1 X-6At narito ang nakasulat sa bawat halaga para sa:
G91 - gumamit ng mga kamag-anak na coordinate (kinakailangan bago ang anumang kilusan kasama ang Z axis)
G1 Z1 - feed ng 1 mm wire
G90 - gumamit ng ganap na mga coordinate (kinakailangan bago ang anumang kilusan kasama ang X axis)
G1 X2 - i-on ang baluktot na ulo sa posisyon 2 (ang bilang na ito ay walang mga yunit)
G1 X-6 - i-ang baluktot na ulo sa posisyon -6
Kung ulitin mo ang mga hakbang na 100 beses, makakakuha ka ng isang code ng liko ng tagsibol. Marami pang mapagkukunan ng mga file ay matatagpuan sa ibaba.
hex-inner.gcode
hex-external.gcode
tagsibol.gcode
Handa na ang makina. Ngunit ang master pa rin ang gagana sa pagpapabuti nito.
Ang buong proseso ng paggawa ng tulad ng isang makina ay makikita sa video.