
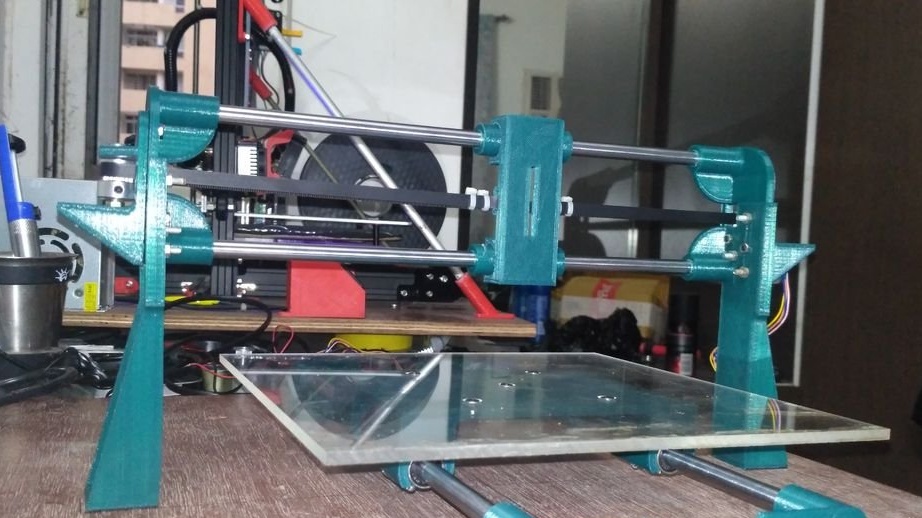
Naghahanap sa pamamagitan ng mga engraver ng laser sa aliexpress, ang master ay natagpuan ang ilang mga USB-powered models. Nakapagtataka na maaari silang mag-ukit sa iba't ibang mga materyales, pati na rin ang mga gupit na hugis at pattern mula sa mga sticker at papel, at gawin ang lahat ng kapangyarihang ito mula sa 5V USB. Ngunit ang disbentaha ng mga ukit na ito ay mayroon silang isang maliit na lugar ng pagtatrabaho, sa karamihan ng mga kaso ay 40 mm x 40 mm lamang.
Pagkatapos ay nagpasya ang master na nakapag-iisa na magdisenyo at gumawa ng isang ukit gamit ang isang 3D printer para sa pagmamanupaktura. Kasama ang paraan, nagpasya siyang gawin ang modular ng may-ari ng laser upang ang laser ay madaling mapalitan ng isang panulat o marker. Ang isang pag-andar ng koneksyon sa Bluetooth ay naidagdag din.
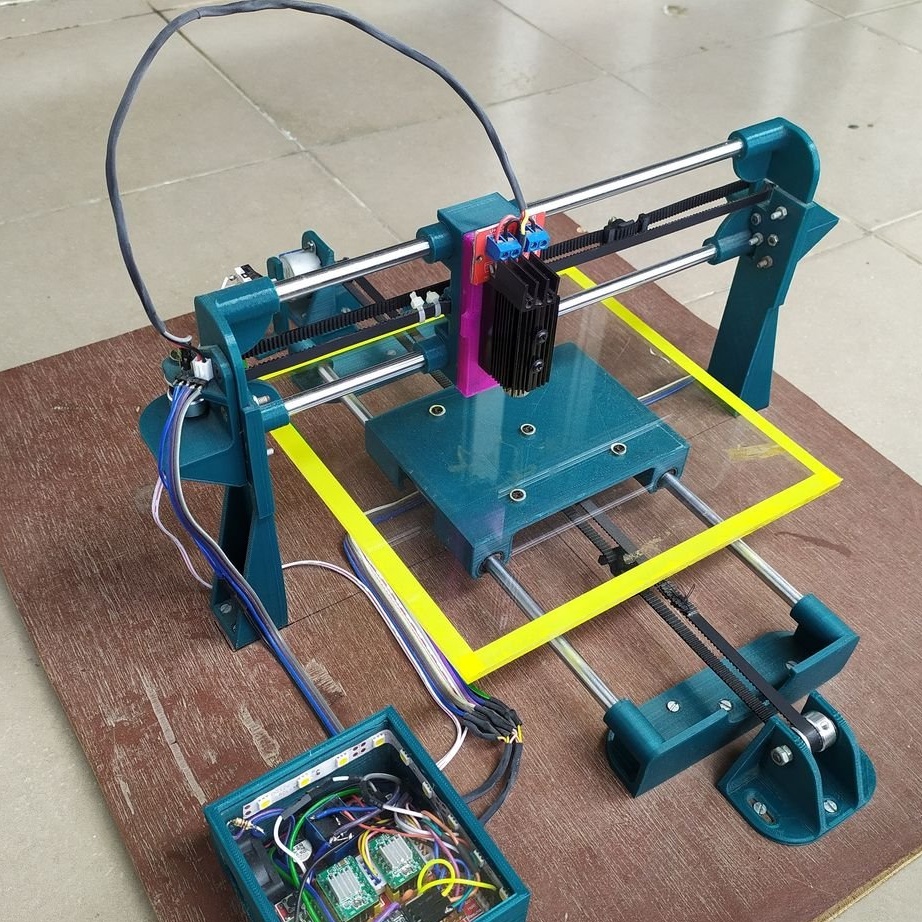
Ang mga teknikal na pagtutukoy ng ukit ay ang mga sumusunod:
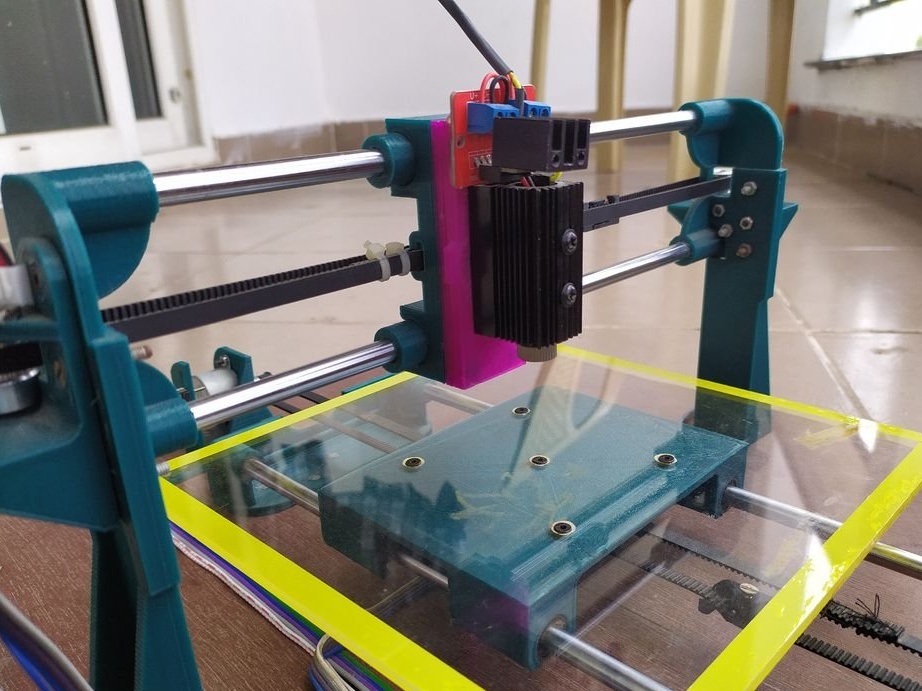
- Lugar sa Paggawa 200 x 162 mm
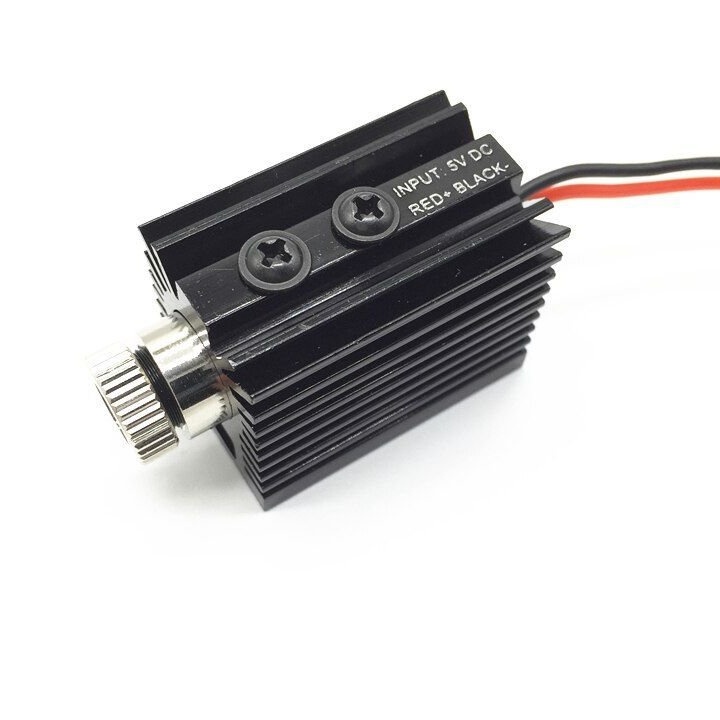
-1000 mw laser module
-Works mula sa isang USB na mapagkukunan ng kapangyarihan (5V)
-Auto function na gabay
- Komunikasyon ng Bluetooth sa pagitan ng laser engraver at PC
- kontrol ng laser ng PWM. (Tumutulong sa paglikha ng iba't ibang lilim ng itim kapag pag-ukit ng mga larawan)
-102.4 mga hakbang bawat resolusyon sa mm
- Ang makina ay maaaring mag-ukit, gupitin at gumuhit sa iba't ibang mga materyales

Mga tool at materyales:
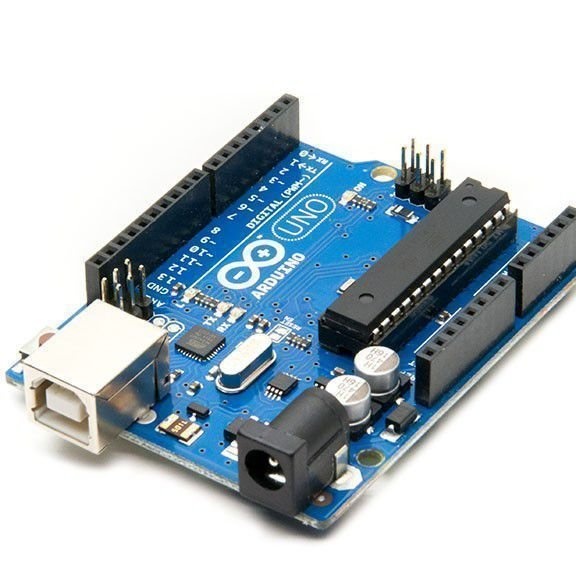
-Arduino UNO;
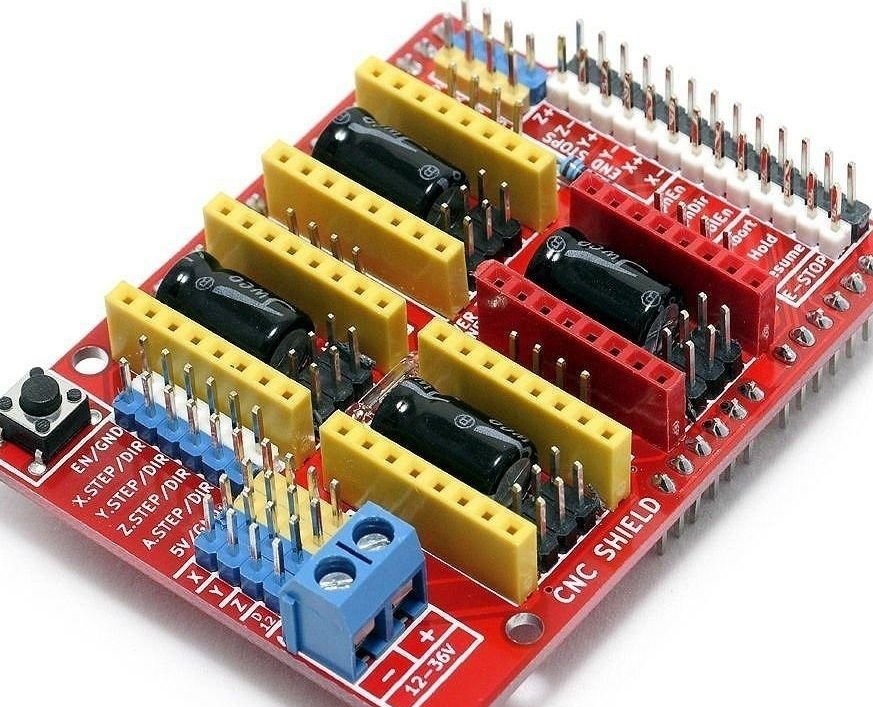
-Expansion board;
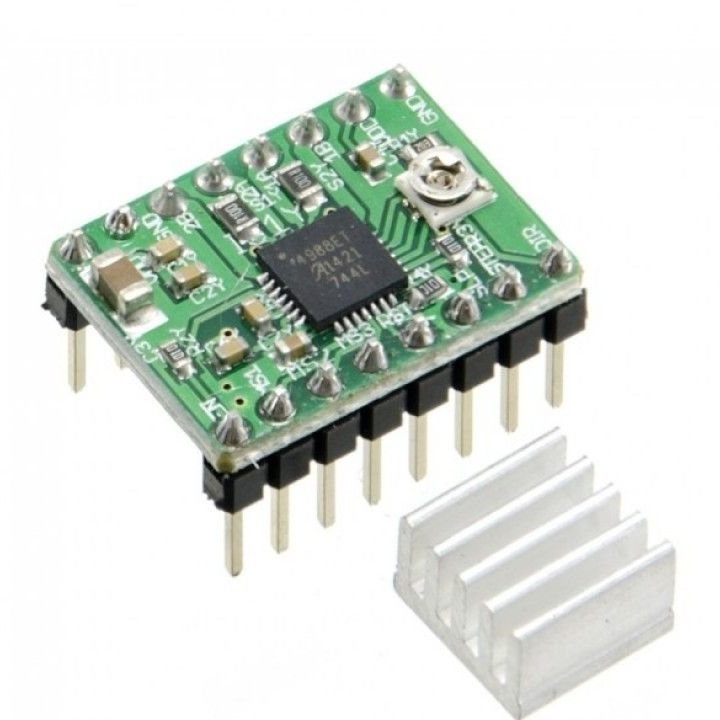
- Isang driver ng motor ng stepper A4988 - 2 mga PC;
-1000 module ng laser ng MW;
- Arduino Nano;
- XL6009 Boost Converter;
- LM8UU linear ball bearings - 6 na mga PC;
Pulley - 4 na mga PC;
- Ang diameter ng mga rod 8 mm, haba ng 300 mm -4 na mga PC;
-module IRF520 Mosfet;
- Relay;
- Limitahan ang mga switch - 2 mga PC;
-Step engine 2 mga PC;
- Neodymium magnets 18 x 5 mm x 3 mm;
-30 * 30 mm 5 bolt fan ng paglamig;
-Belt;
-HC-05 module ng Bluetooth;
-SG90 servomotor;
Mga terminal ng Screw
-Shrink tube;
- Superglue;
-Cable ties;
-Fastener
M3 30mm
M3 12mm bolts
M4 40mm
M3 nuts
M4 nuts;
- Plywood 8mm 48 x 42 cm;
-5mm transparent acrylic sheet 22 x 22 cm;
- MicroUSB cable;
-Wastong papel;
-Nadfil;
- distornilyador;
-Mga accessory;
- Mga Pliers;
- gunting;
-Mga gamit;
-Computer na may software;











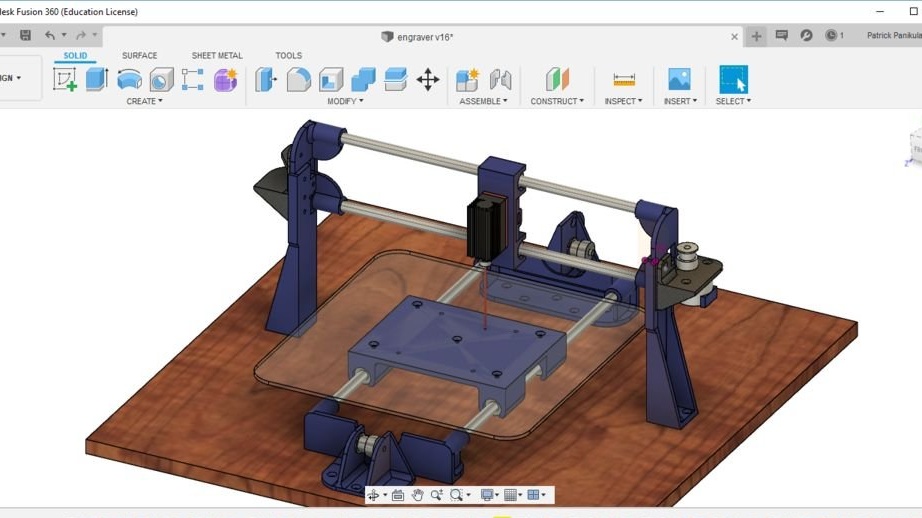
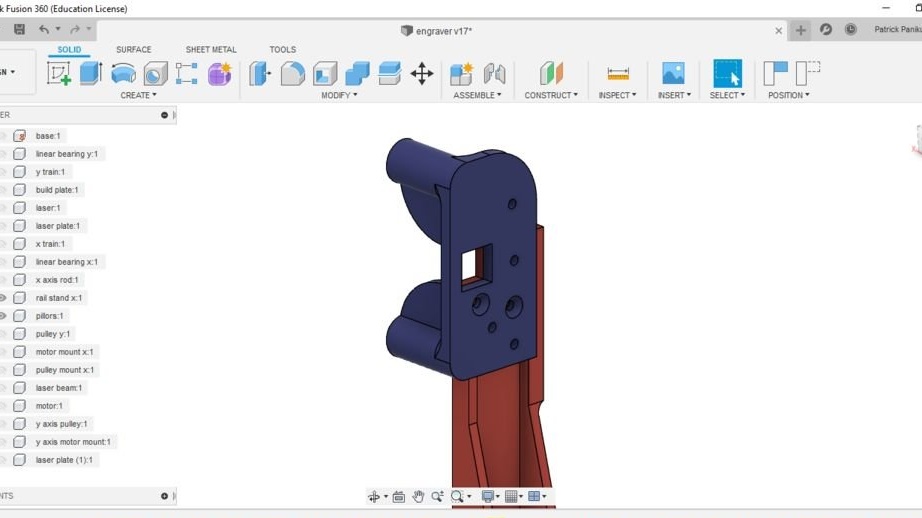
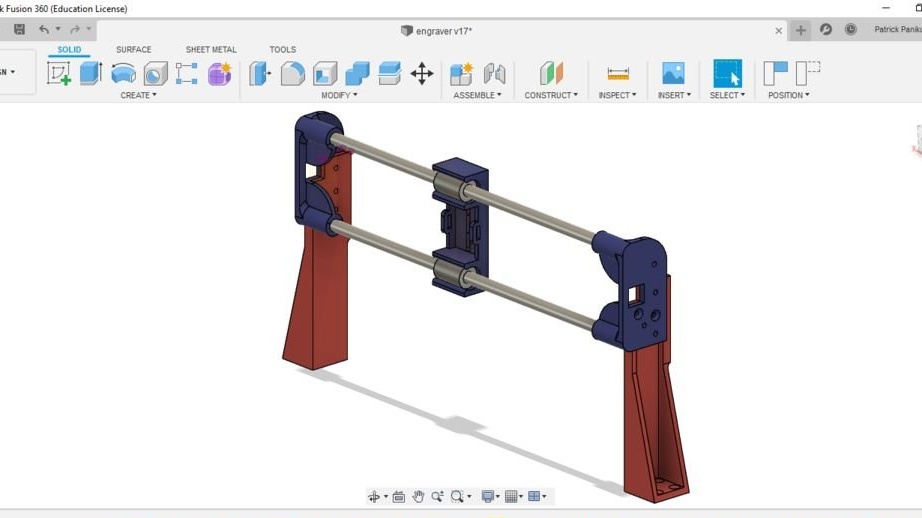
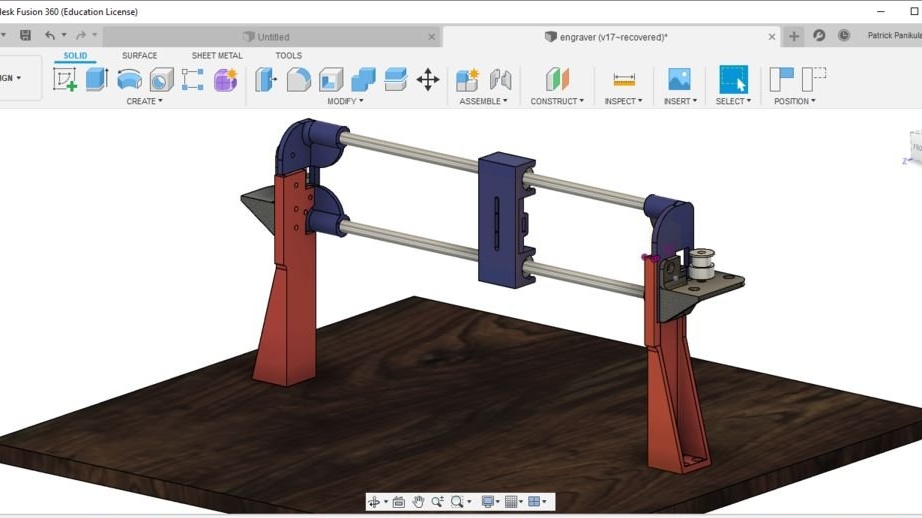
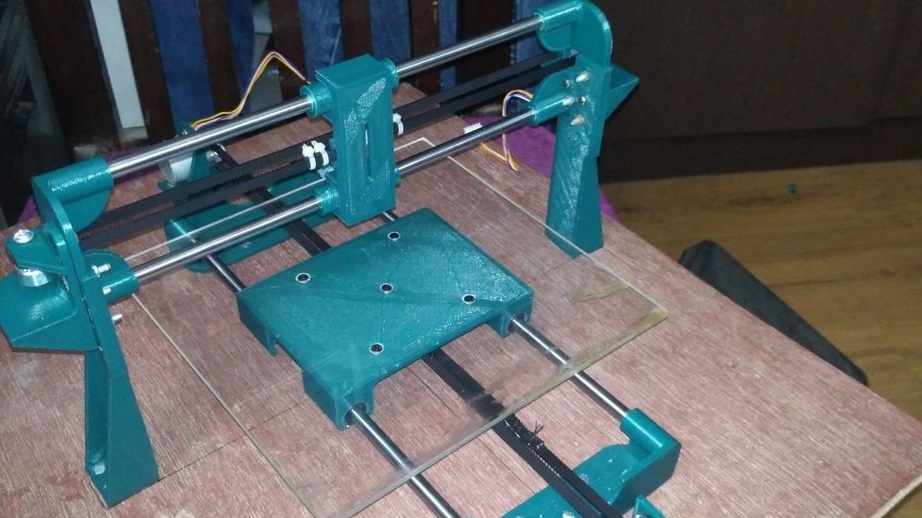
Hakbang Una: Disenyo
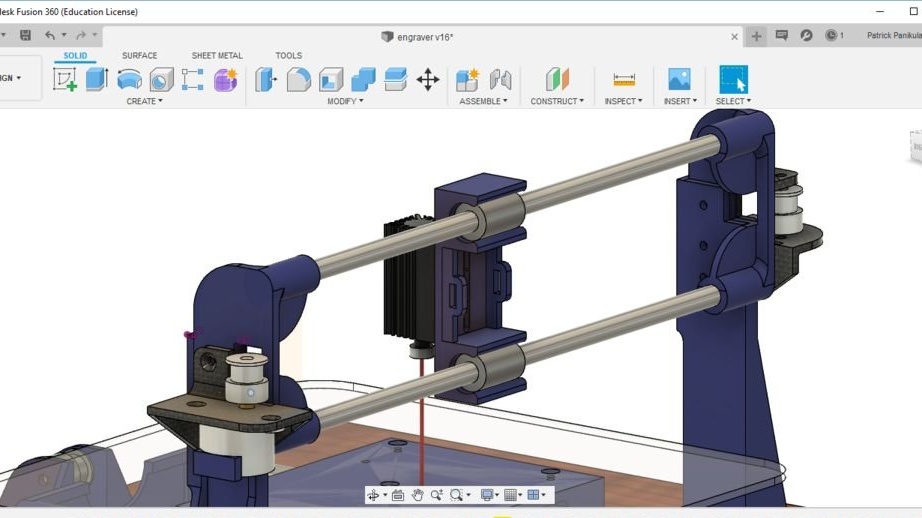
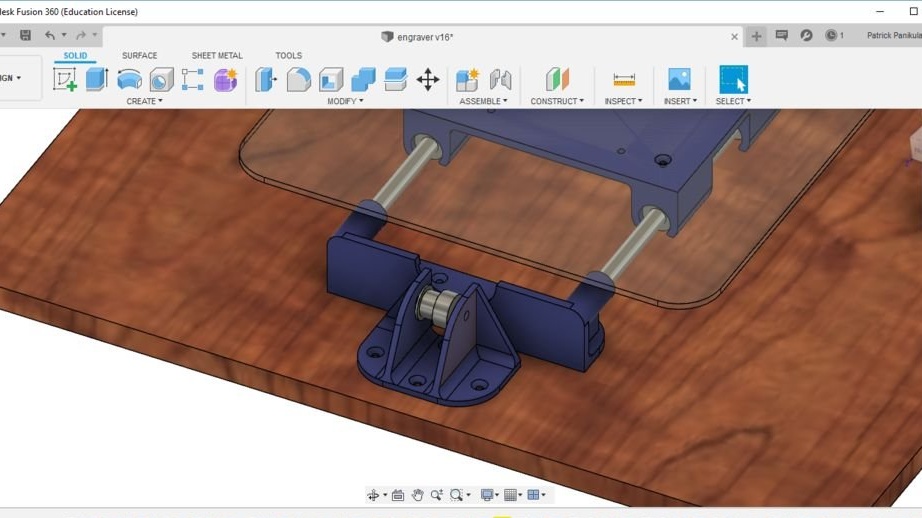
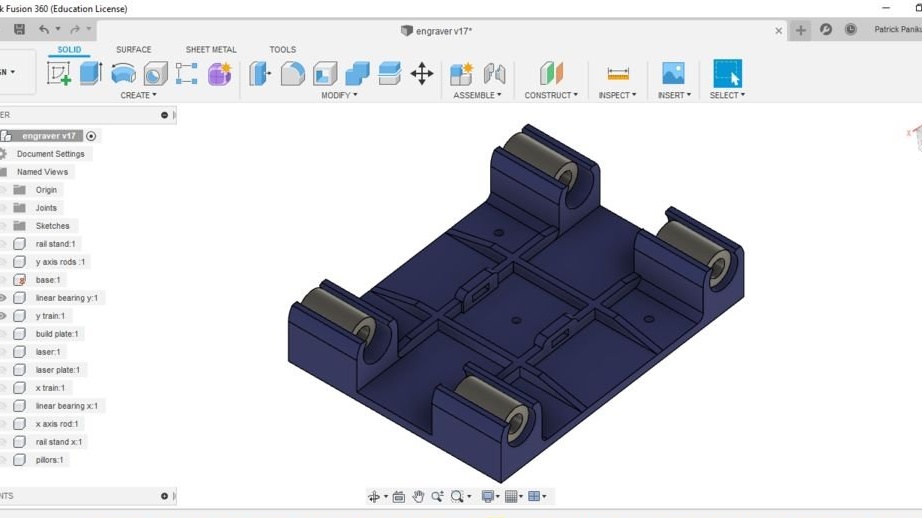
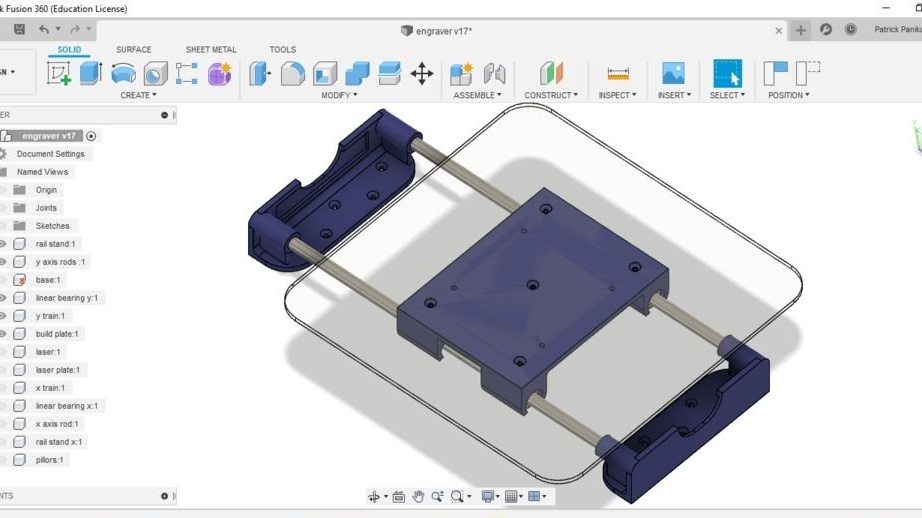
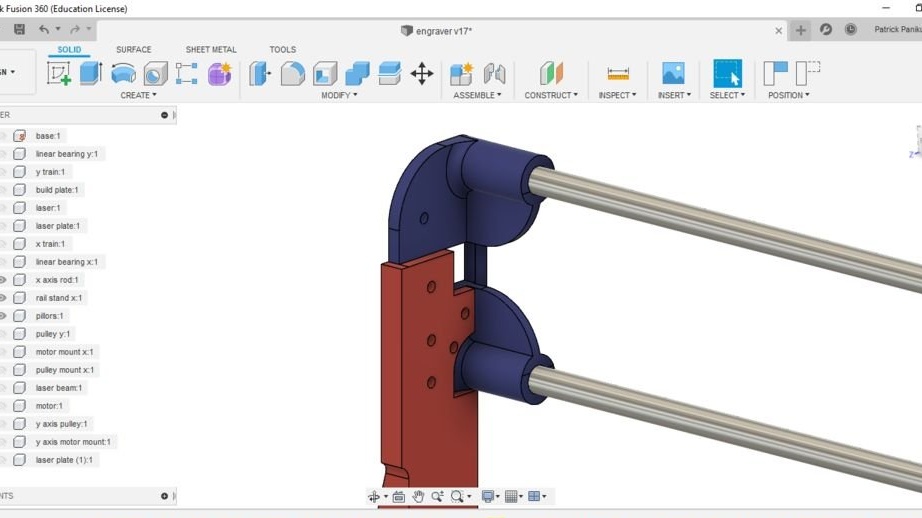
Nagsimula ang wizard sa pamamagitan ng pagdidisenyo ng base at may hawak ng shaft ng Y-axis. Dahil ang mga may hawak ay binubuo ng dalawang magkaparehong sangkap, ang function ng salamin sa Fusion 360 ay naging mas madali ang trabaho. Ang function ng salamin ay ginamit nang maraming beses sa pag-unlad ng laser engraver.Hindi tulad ng iba pang software ng CAD, ang isa sa mga mahusay na tampok ng Fusion 360 ay pinapayagan kang lumikha ng maraming mga bahagi sa isang screen na may isang link sa iba pang mga bahagi, i.e. ang modelo maaaring idinisenyo tipunin.
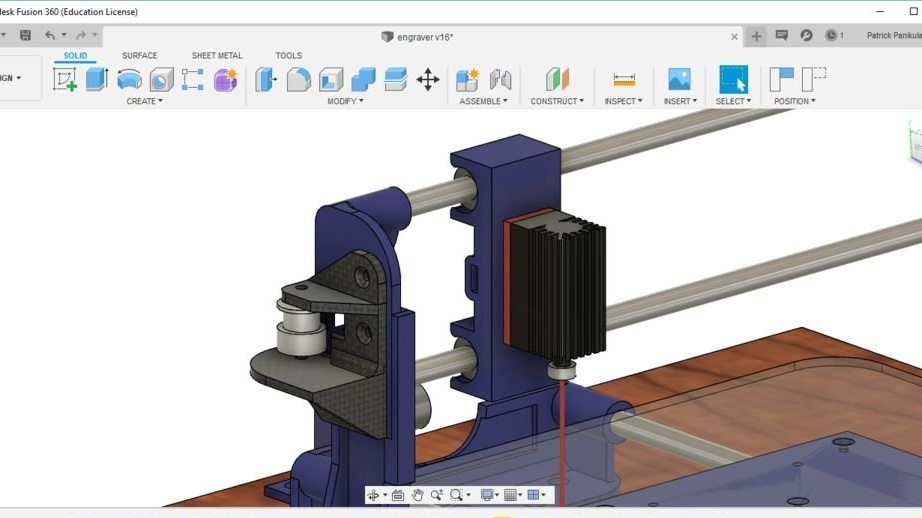
Ang taas ng mga gabay ng X axis ay nakasalalay sa focal haba ng ginamit na laser. Kailangan mo lamang tiyakin na ang taas ng laser ay nasa saklaw na ito. Ang pangwakas na pagtuon sa beam ng laser ay maaaring gawin sa pamamagitan ng pag-aayos ng lens sa laser.
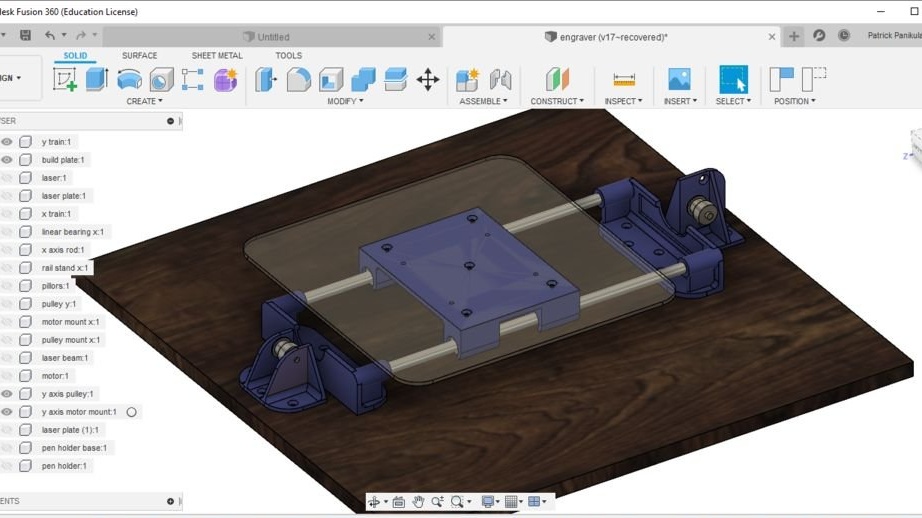
Pinapayagan ka ng Fusion 360 na piliin ang hitsura at materyal ng mga sangkap upang maging real ang panghuling disenyo. Pinapayagan ka ng programa na mai-convert at i-save ang mga binuo na bahagi nang direkta sa format ng STL para sa pag-print ng 3D.
Sa ibaba maaari mong i-download ang Fusion 360 file na may proyektong ukit.
laser engraver v16.f3d
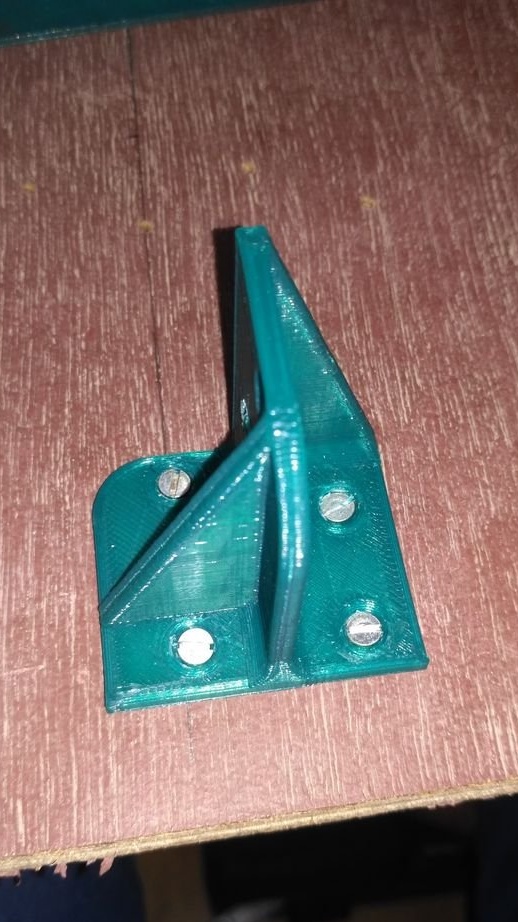
Hakbang Dalawang: 3D Pagpi-print
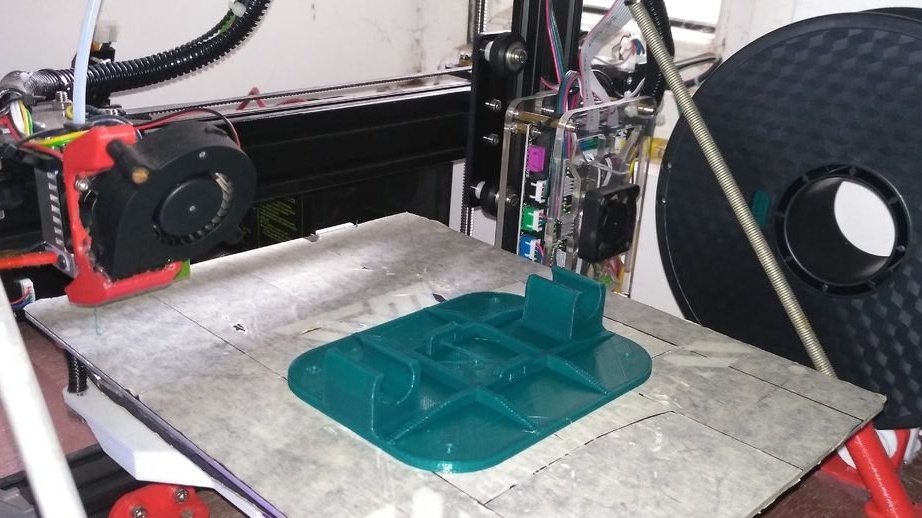
Pagkatapos ay nagsisimula ang wizard upang mai-print ang mga detalye. Ang lahat ng mga bahagi ay idinisenyo sa paraang madali silang mai-print sa isang 3D printer nang walang mga suporta.
Inilimbag ng wizard ang mga detalye sa isang printer ng TEVO 3D.
Materyal: PLA (Madilim na Green)
Taas ng Layer: 0.3mm
Pagpuno: 30%
Ang kapal ng pader: 0.8mm
Nangungunang / Ibabang Kapal: 0.9mm
Maaaring mai-download ang mga file para sa pag-print sa pamamagitan ng pag-click sa ito ang link.

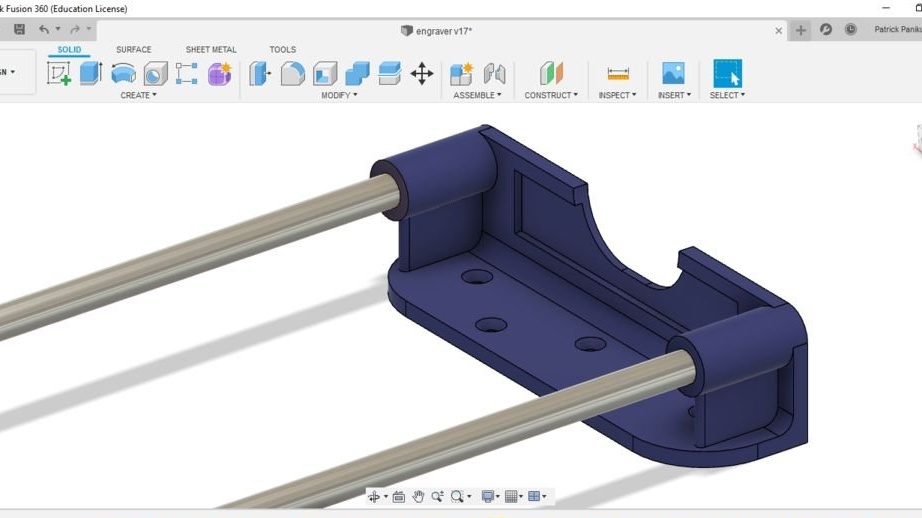
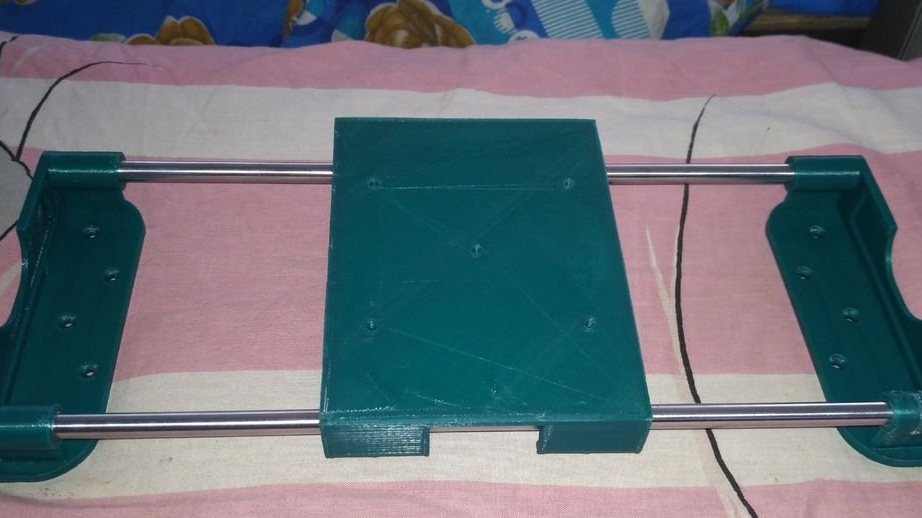
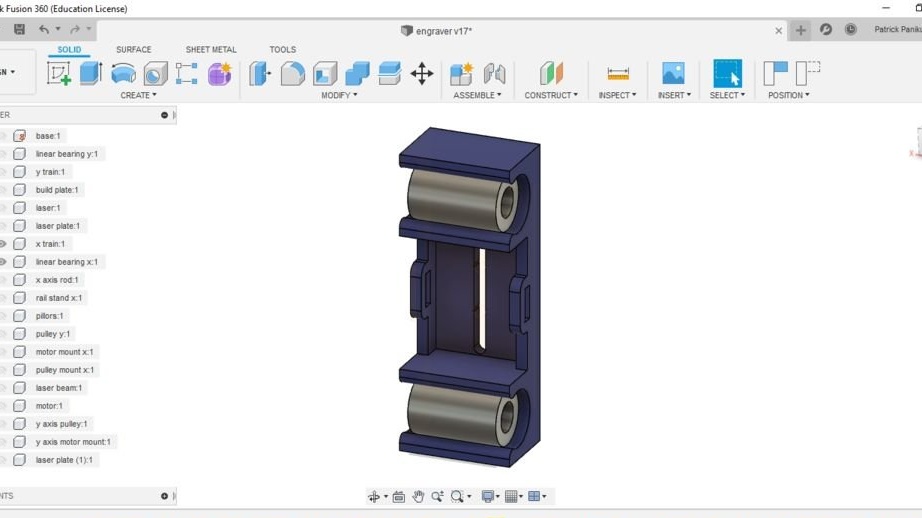
Hakbang Tatlong: Pagtitipon ng Y Axis
Pinapayuhan ka ng wizard na buksan ang file ng Fusion 360 PC bago mag-ipon. Makakatulong ito upang mas maintindihan ang proseso ng pagtatayo.
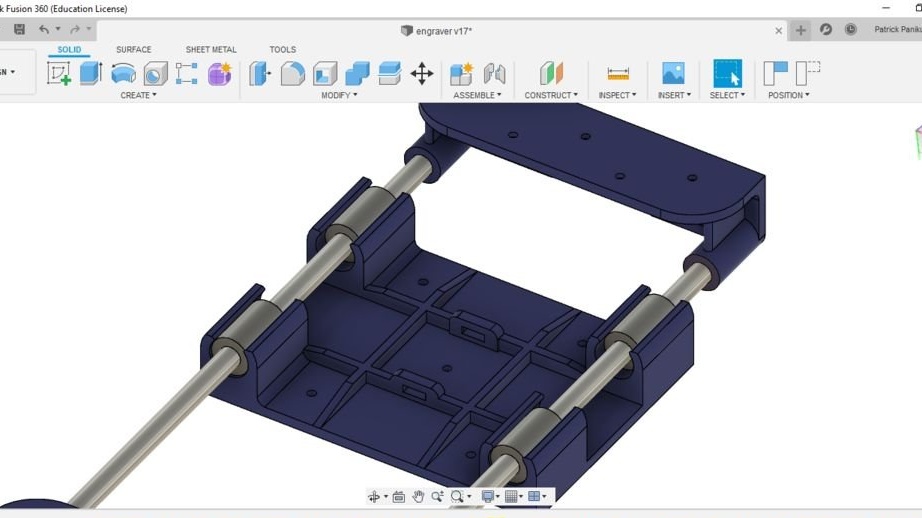
Ang wizard ay nag-install ng mga rod at linear bearings. Ang dinisenyo ng master upang maiwasan ang mga gluing bahagi, i. masikip ang fit. Ang mga rod ay dapat punan sa upuan na may martilyo.
Pagkatapos ng pagpupulong, siguraduhing malayang gumagalaw ang karwahe.
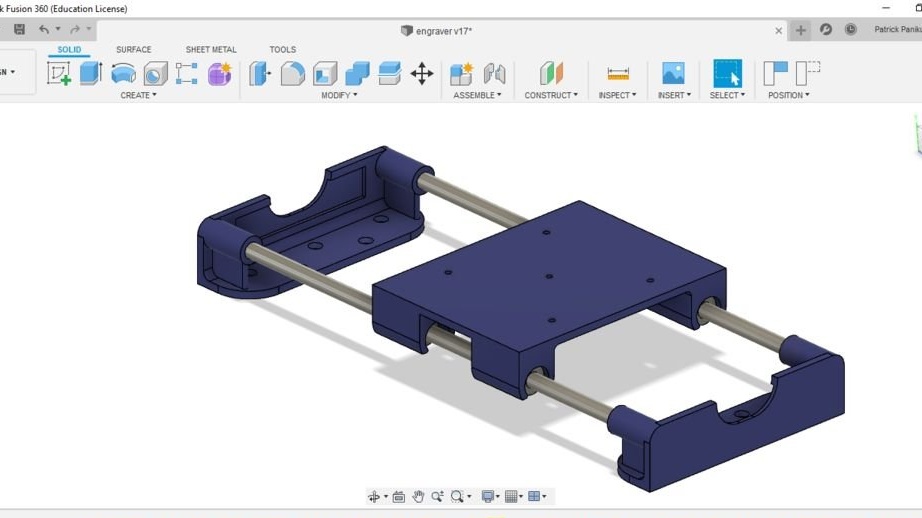



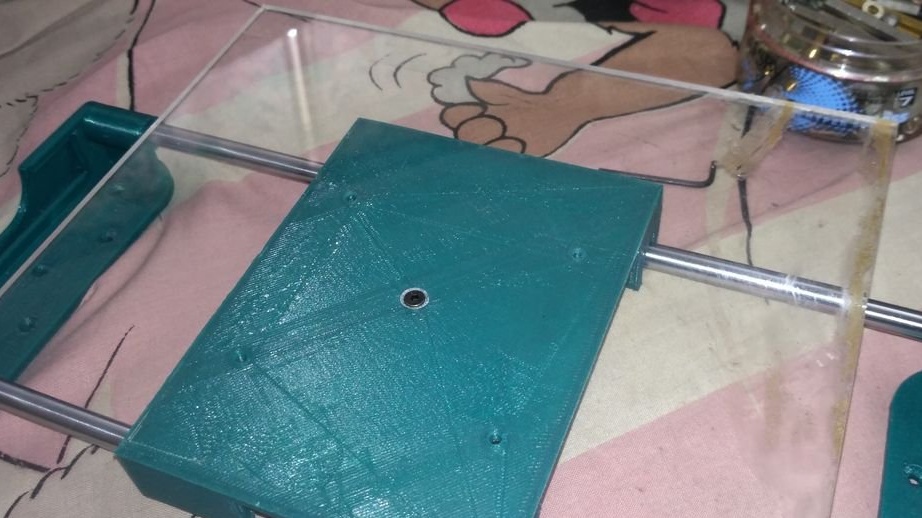
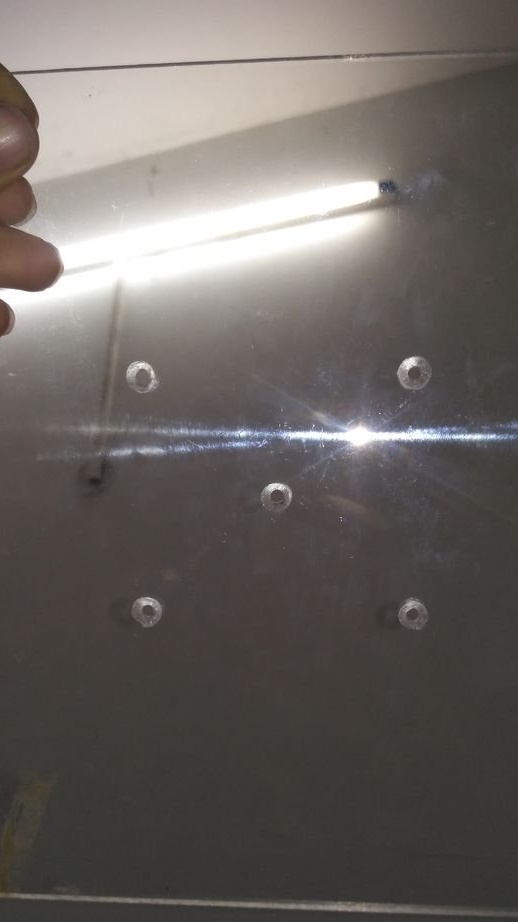
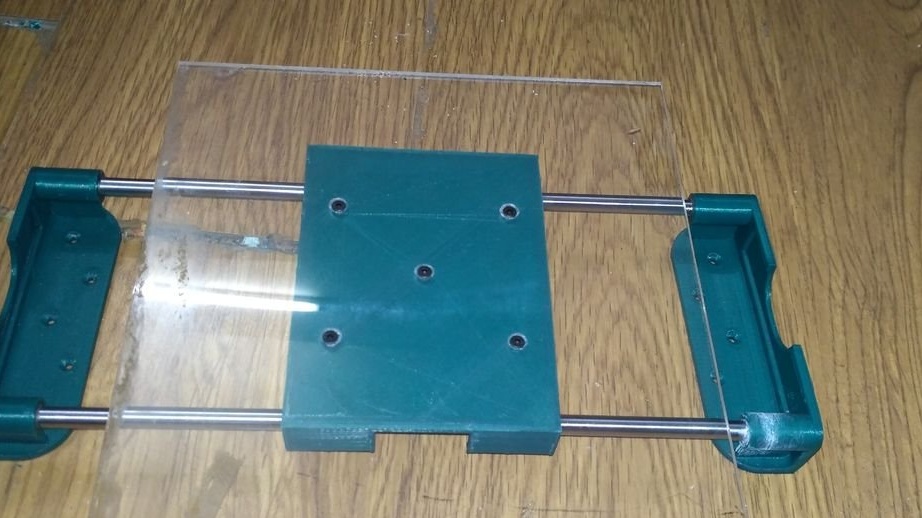
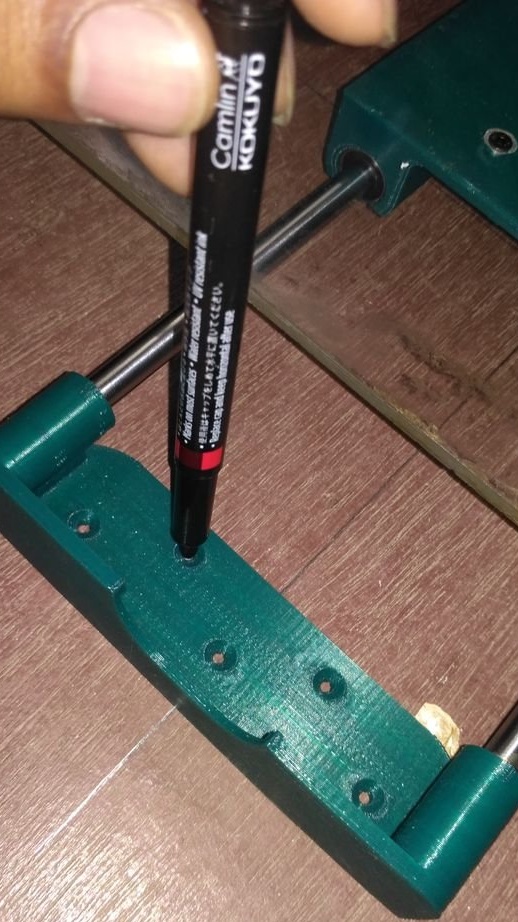
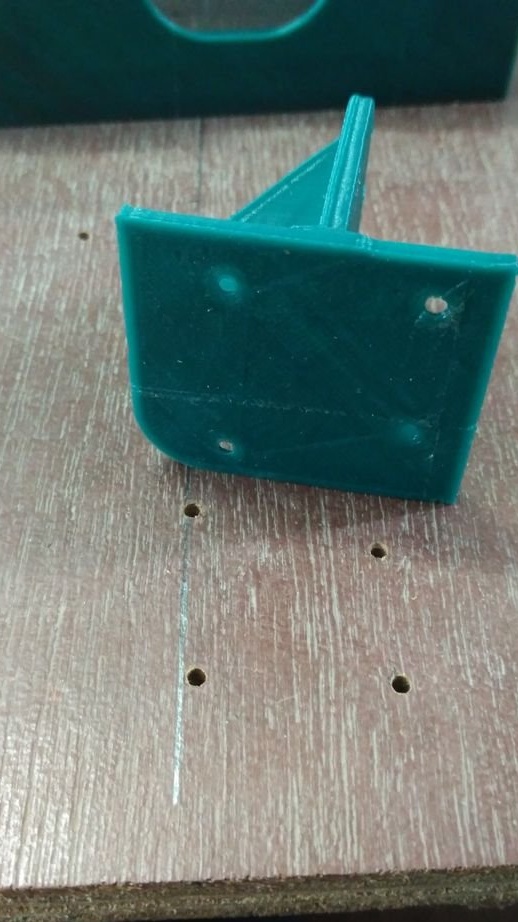
Hakbang Apat: Desktop
Ang isang butas ay drill sa isang acrylic sheet. Screws ang sheet sa karwahe at itinatakda ang mga gilid ng sheet na eksaktong kahanay sa mga gilid ng karwahe. Mga marka at drills apat na mga mounting hole. Screws acrylic sa karwahe.





Hakbang Limang: X axis
Pagkatapos ay kinokolekta ng panginoon ang X axis.Ang mga gabay para sa axis ay nakalimbag ng panginoon, yamang ang binili niya ay naging may depekto. Ayon sa kanya, pagkatapos ng paggiling at pagpapadulas, ang mga gabay na ito ay gumagana nang hindi mas masahol kaysa sa mga binili.





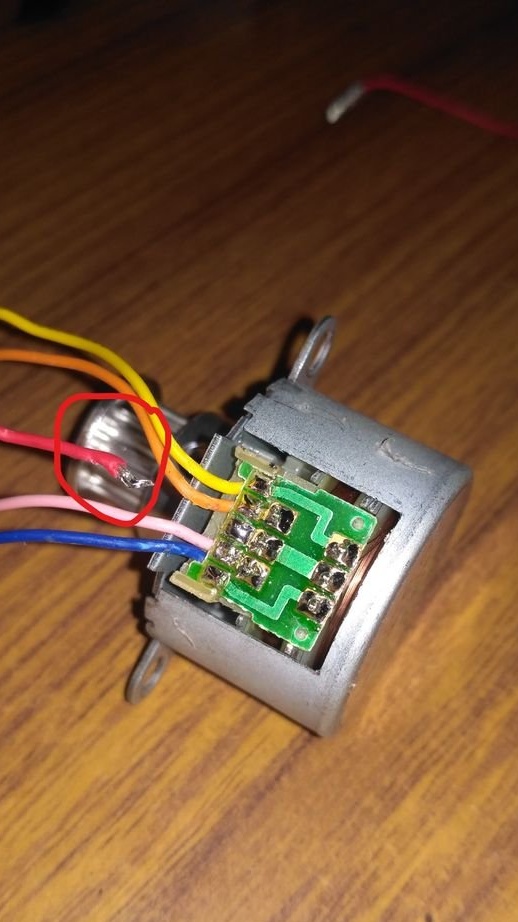
Hakbang anim: muling paggawa ng engine ng 28BYJ-48 unipolar sa isang bipolar
Mayroong dalawang pangunahing mga kadahilanan kung bakit kailangan mong mag-convert ng isang unipolar motor sa isang bipolar motor.
Ang algorithm ng kontrol ng motor ng bipolar gamit ang driver ng motor ng step na A4988 ay mas simple kaysa sa pagkontrol sa isang unipolar motor
Sinusuportahan lamang ng pagpapalawak ng board ng motor na bipolar stepper.
Maaari mong gawing muli ang makina sa tatlong hakbang.
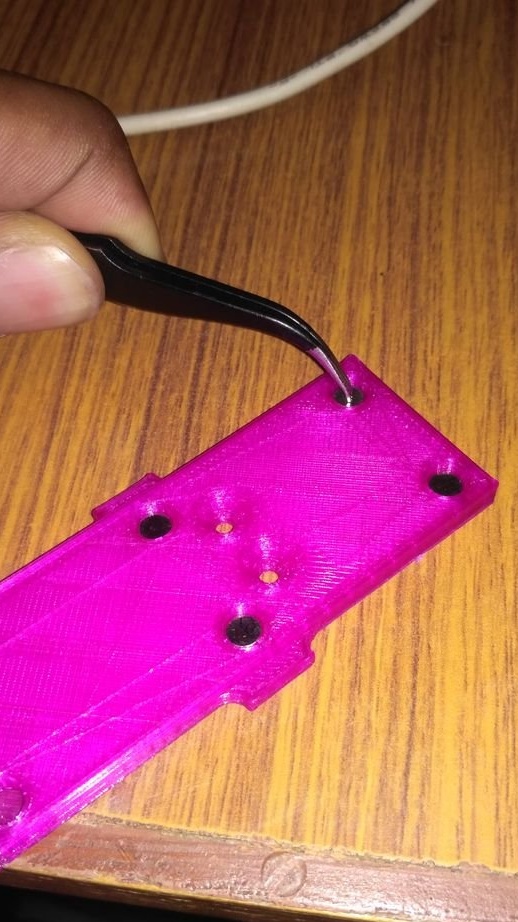
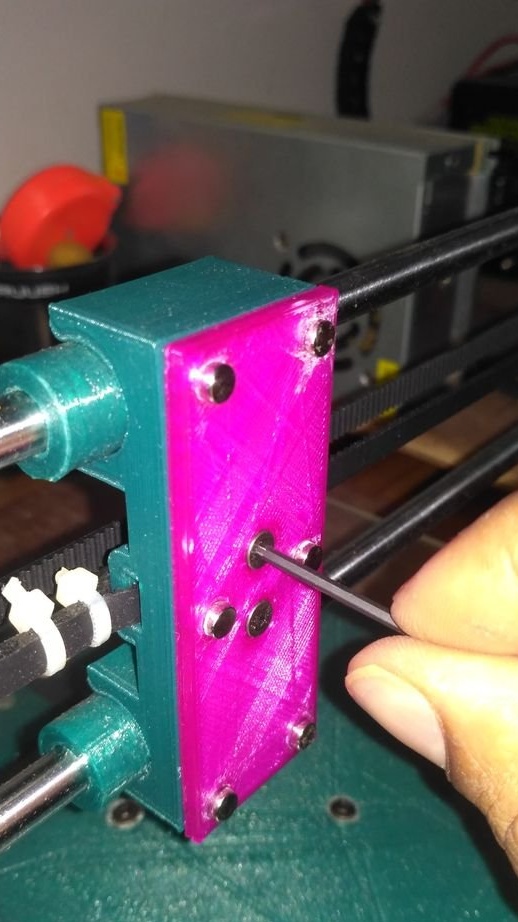
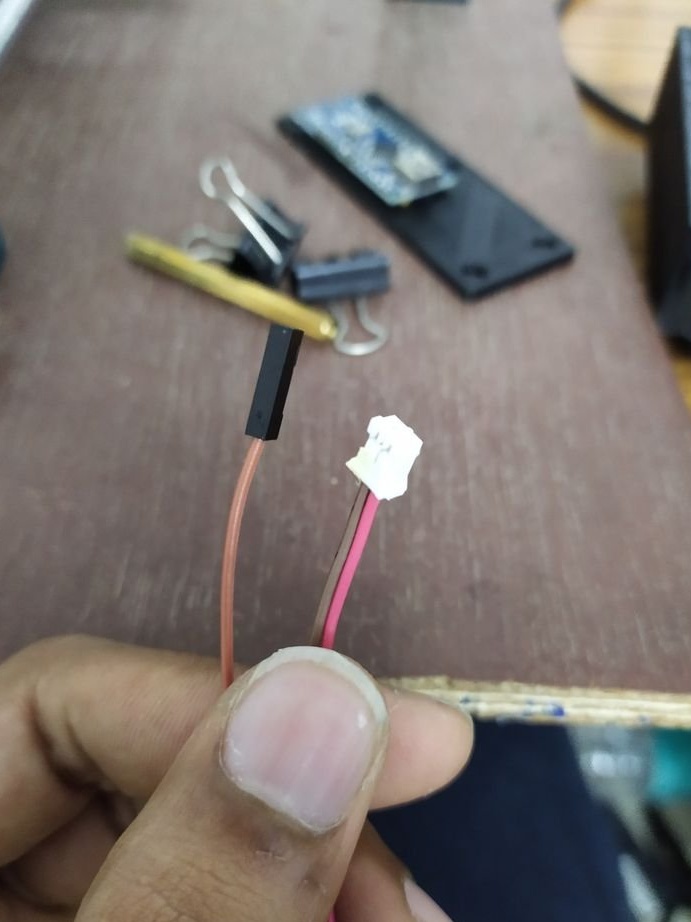
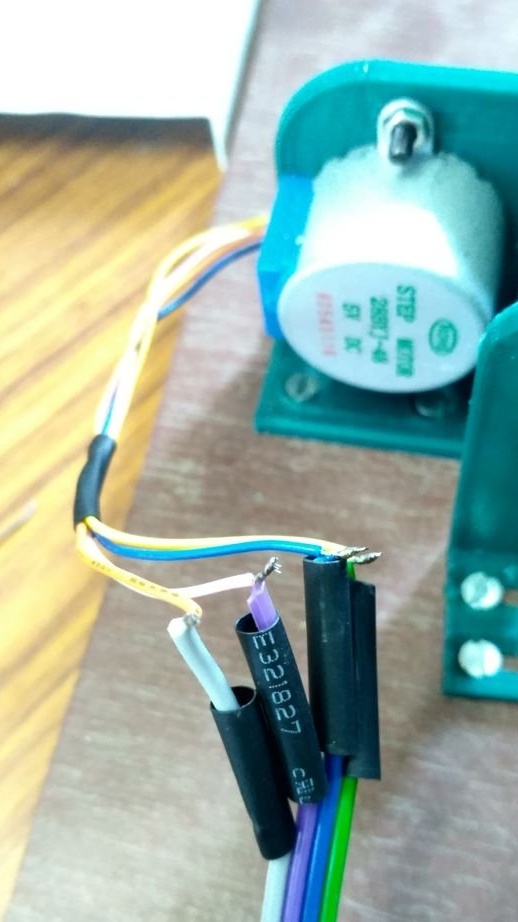
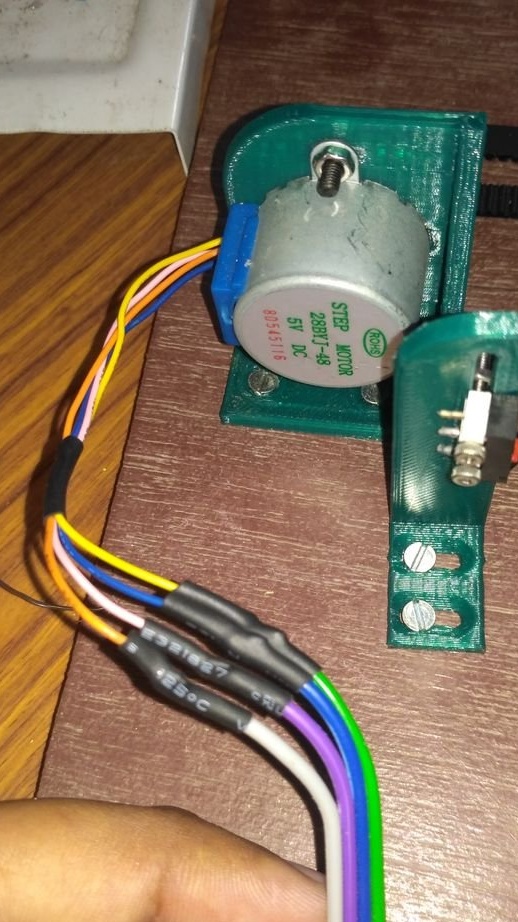
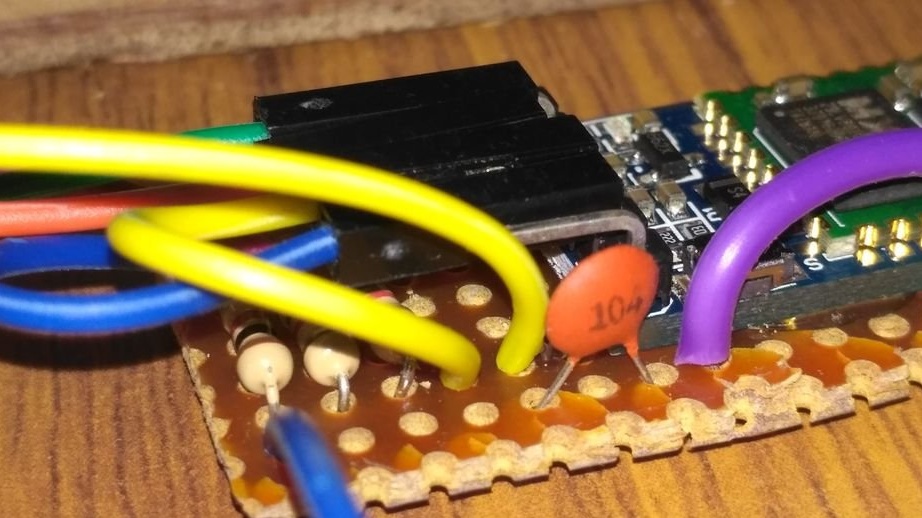
Buksan ang asul na kaso ng plastik, idiskonekta ang pulang wire mula sa board, tulad ng ipinakita sa unang larawan.
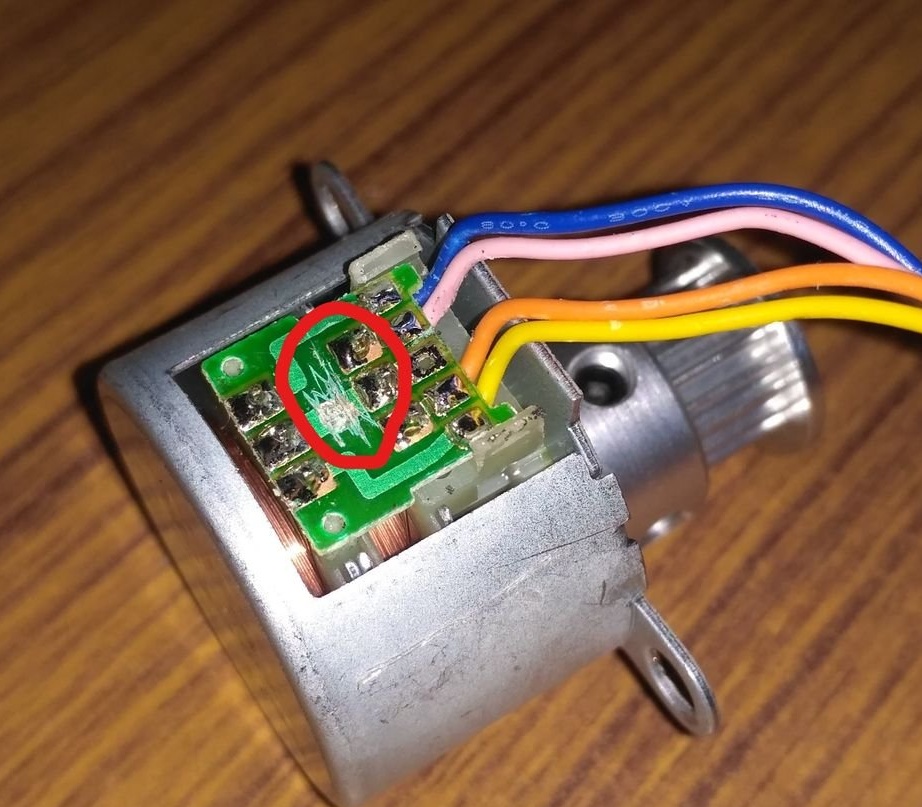
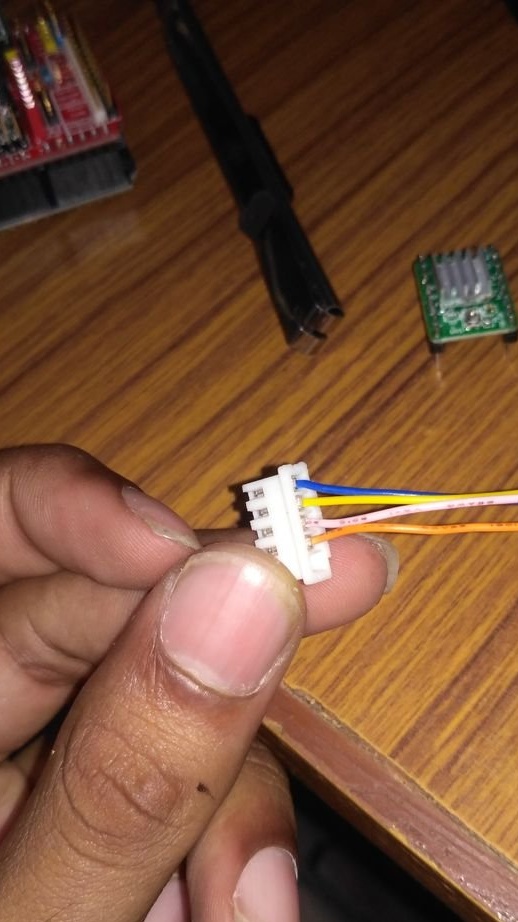
Ngayon kailangan mong masira ang track, tulad ng sa pangalawang larawan at baguhin ang mga wire sa bloke, tulad ng sa pangatlong larawan.
Ikapitong hakbang: pag-install ng motor, pulley, belt
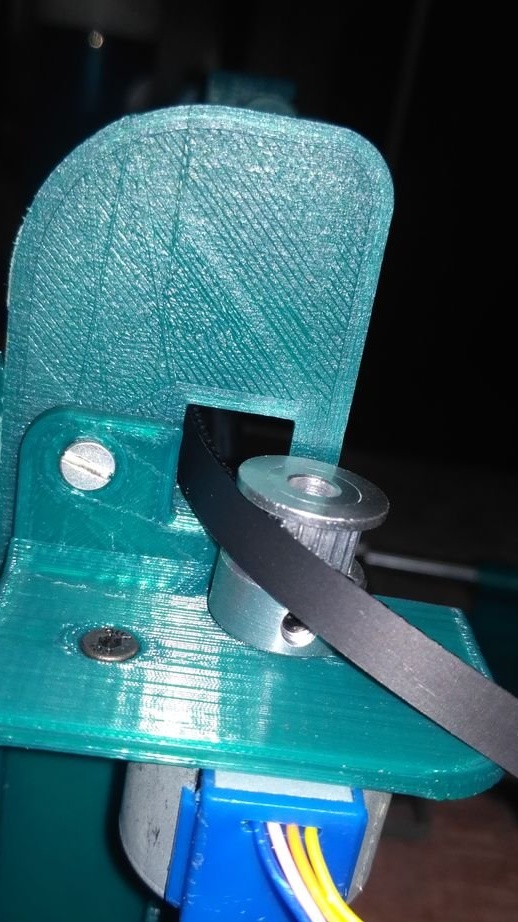
Nag-install ng makina. Sa baras, siniguro ng makina ang isang kalo. Ang pangalawang kalo ay nagtatakda sa kabaligtaran ng makina. Pinapabilis ang pagtatapos ng sinturon na may kurbatang. Ipinapasa ang pangalawang dulo ng sinturon sa pamamagitan ng mga pulley at din mabilis.



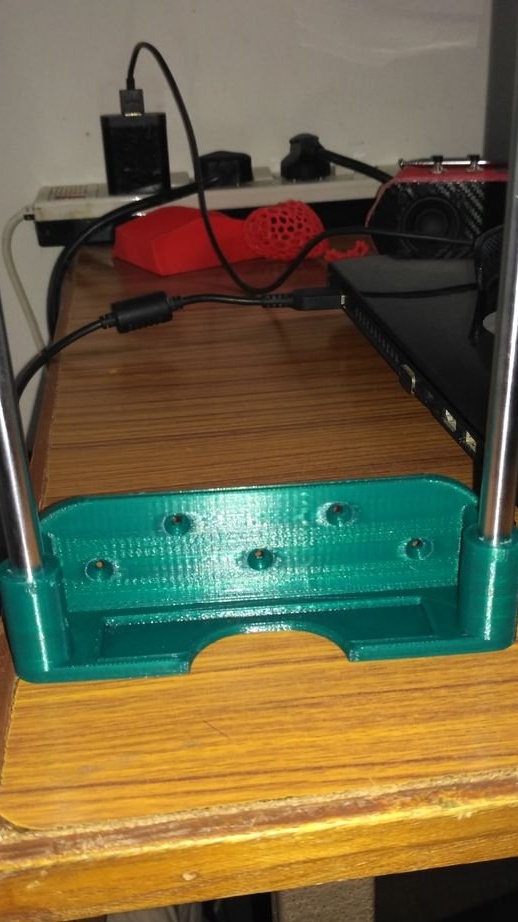
Hakbang Walong: Foundation
Ang base ay gawa sa playwud. Sa kanya, ikinakabit ng master ang X axis.







Hakbang Siyam: Y axis
Kinokolekta ang axis ng Y. Ito ay isang mahirap na hakbang.
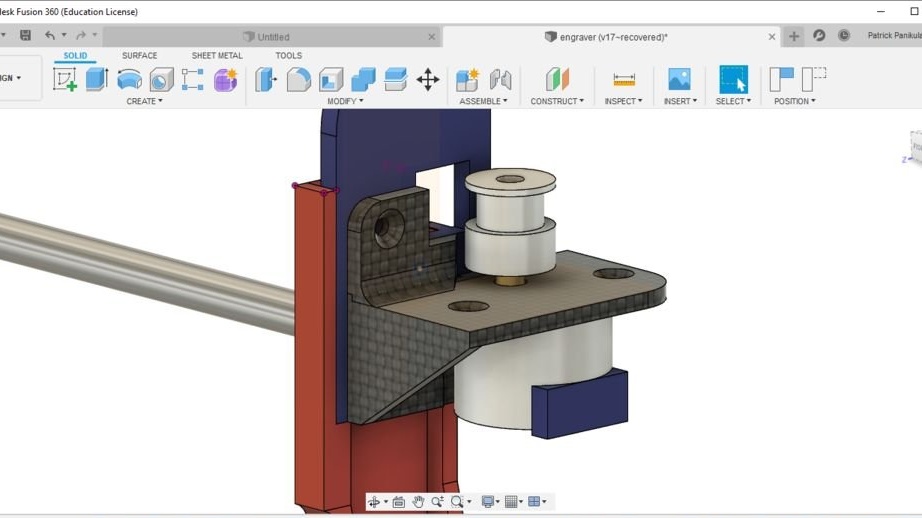
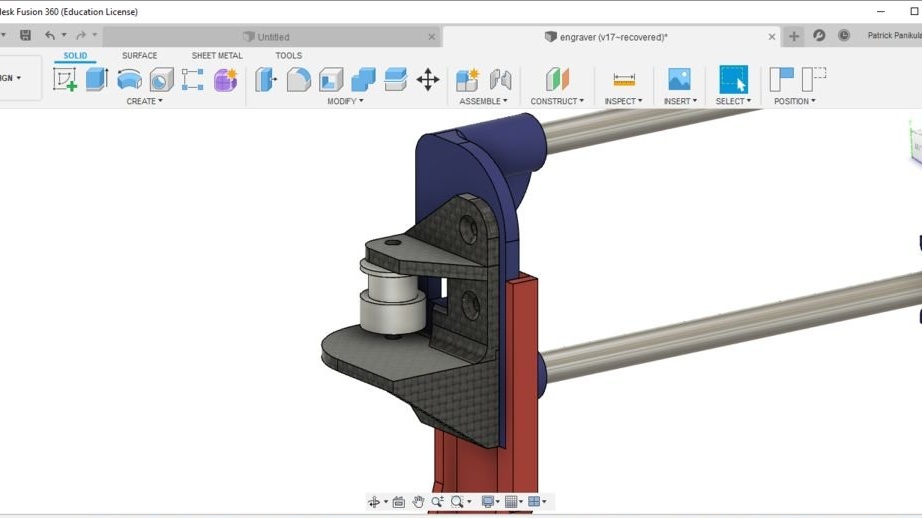
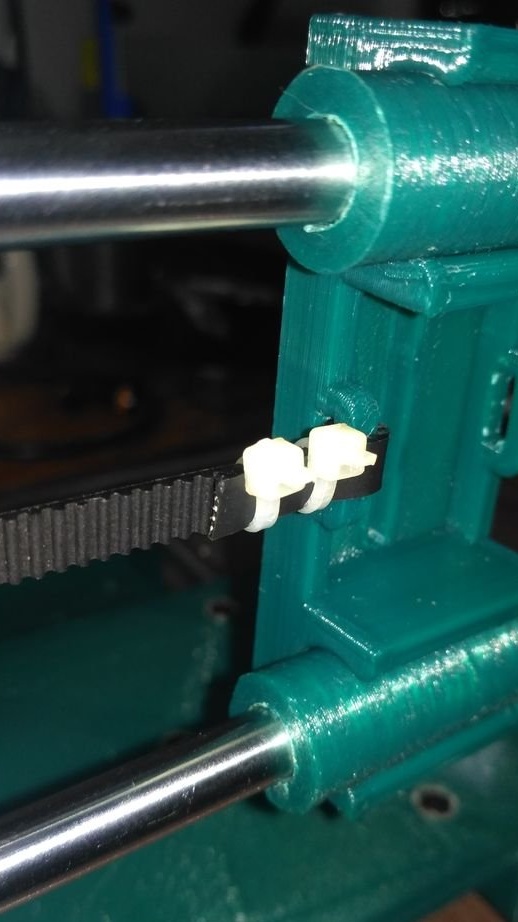
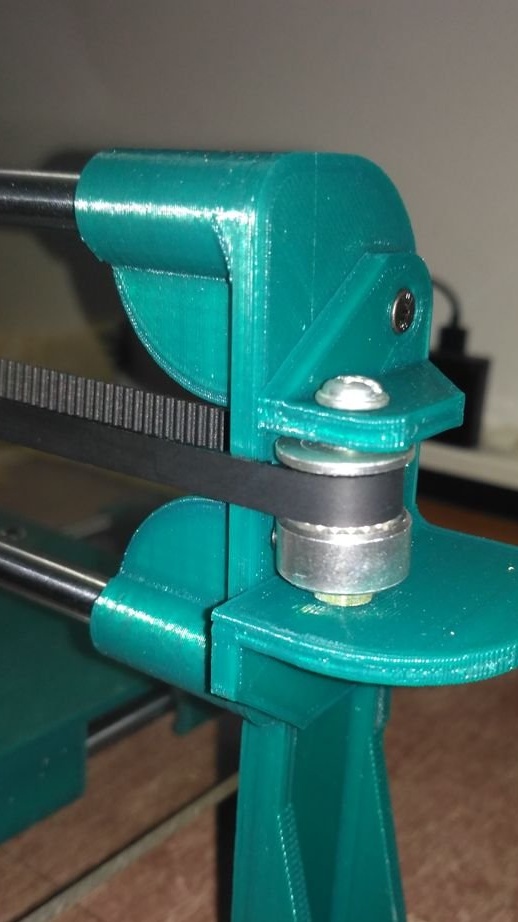
Pangkatin ang may hawak ng pulley gamit ang may hawak na Y-axis pulley, pulley, 40 mm M4 bolt / nut at metal washers tulad ng ipinakita sa unang dalawang larawan.


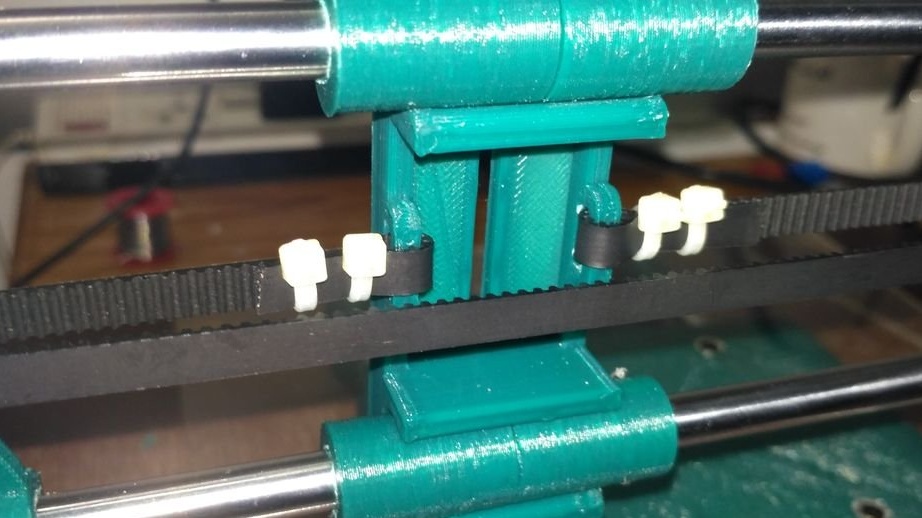
Ngayon itali ang isang dulo ng timing belt sa isa sa mga puwang sa ilalim ng karwahe ng Y-axis.
Ipasa ang libreng pagtatapos ng sinturon sa pamamagitan ng pulley Assembly na ginawa mo nang mas maaga, at pagkatapos ay i-snap ito sa pangalawang uka na matatagpuan sa ilalim ng karwahe ng Y-axis.
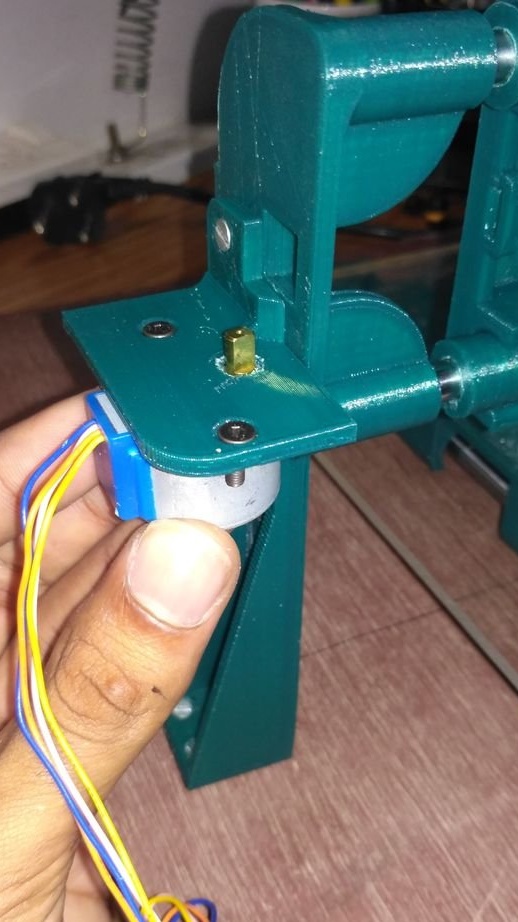
Matapos makumpleto ang 3 hakbang na ito, kailangan mong i-screw ang pagpupulong ng Y-axis sa base ng playwud.



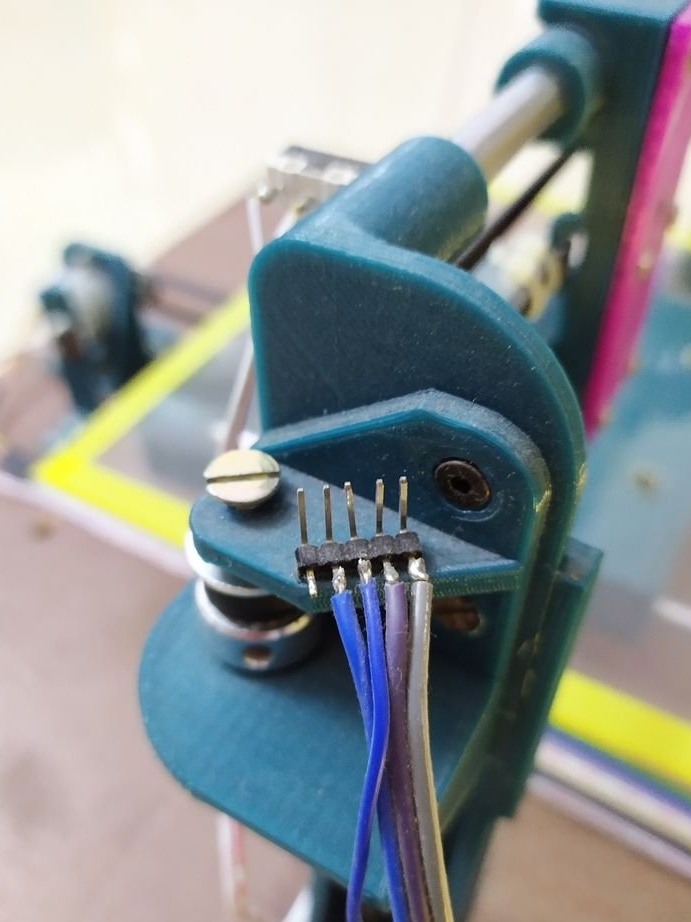
Ikabit ang motor ng stepper sa Y-axis motor mount gamit ang dalawang 12 mm M3 bolts at nuts.
Ngayon ay i-tornilyo ang may hawak na Y-axis pulley at mount ng engine sa base ng playwud.Gawin ito pagkatapos ayusin ang magkabilang panig upang makuha ang tamang pag-igting ng sinturon. Ang isang belt tensioner ay idadagdag sa paglaon.

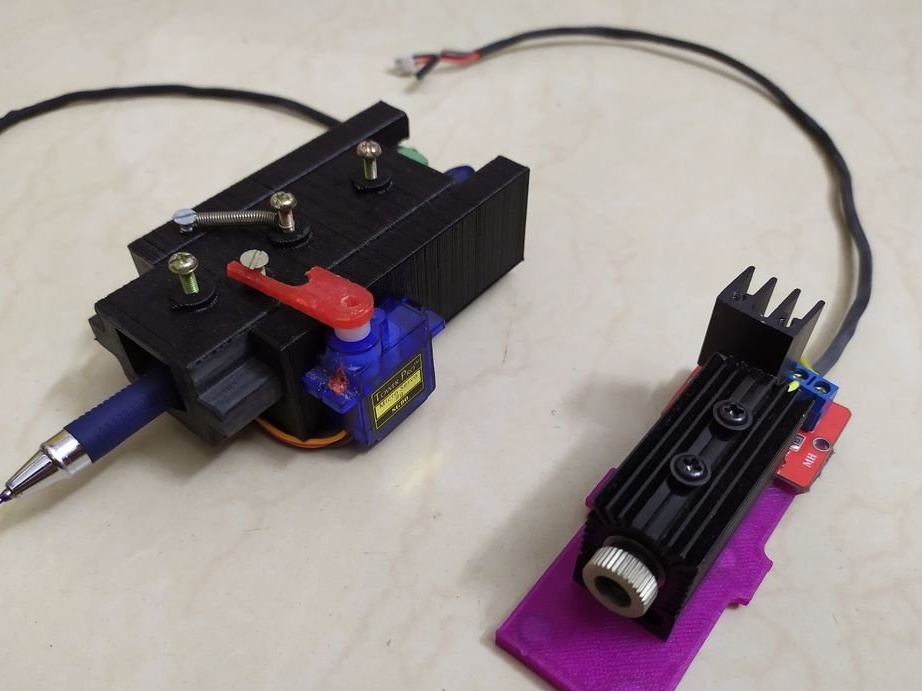
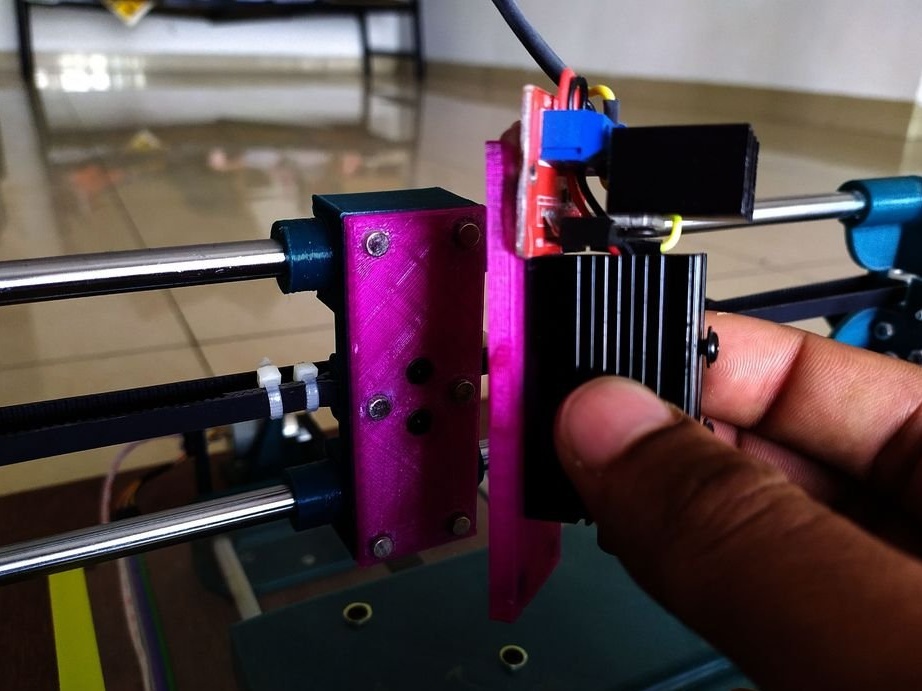
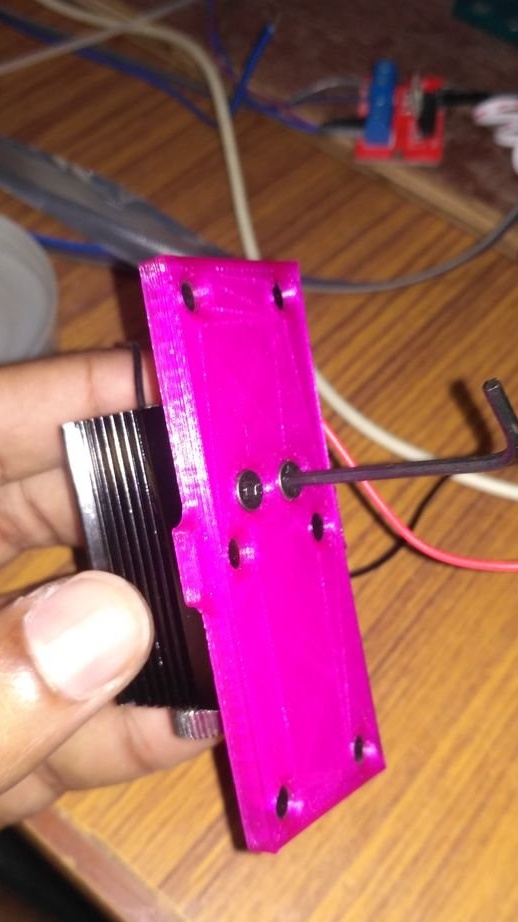
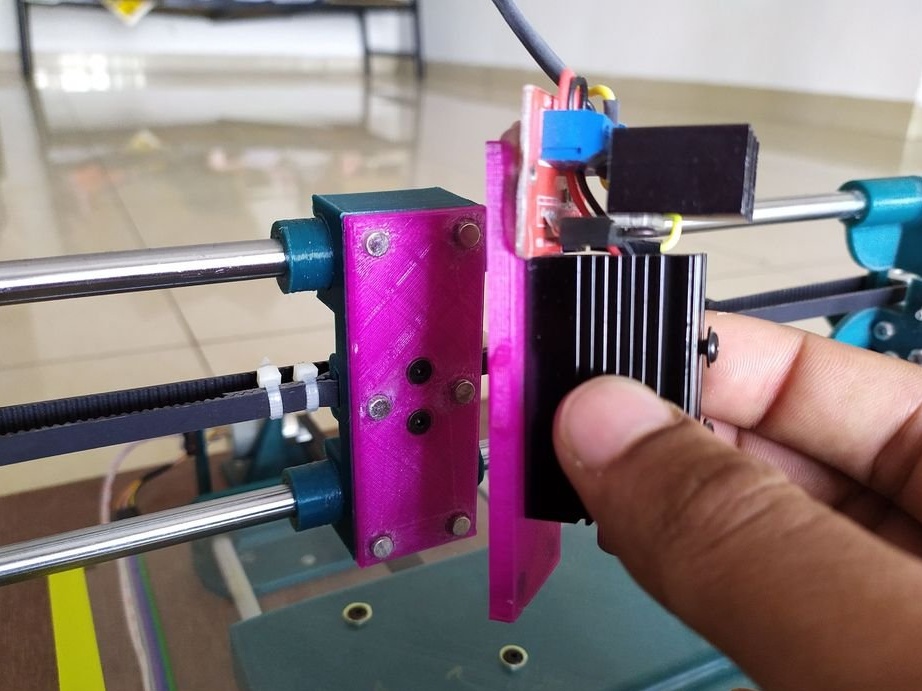
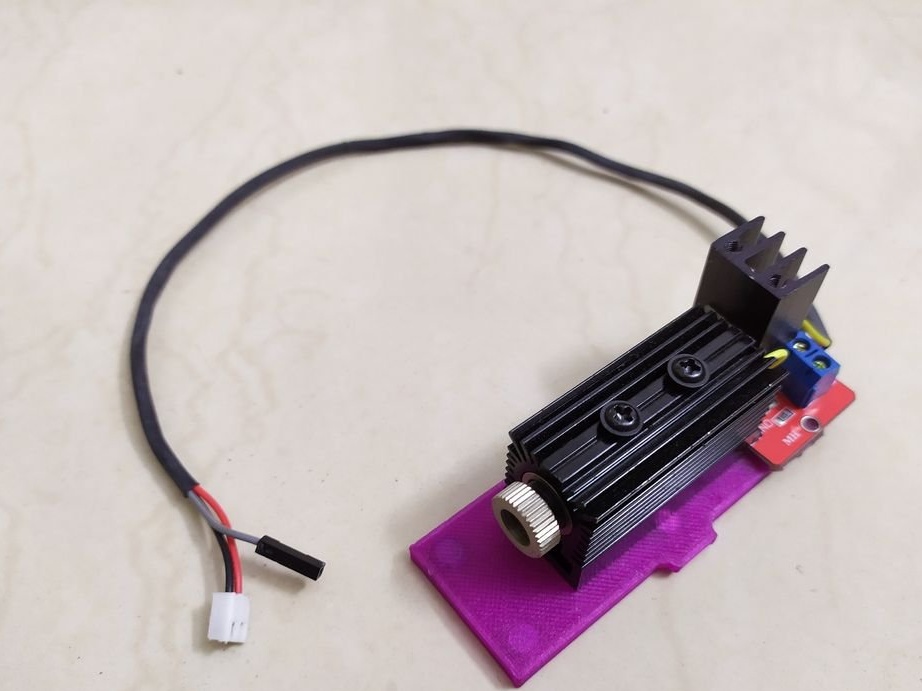
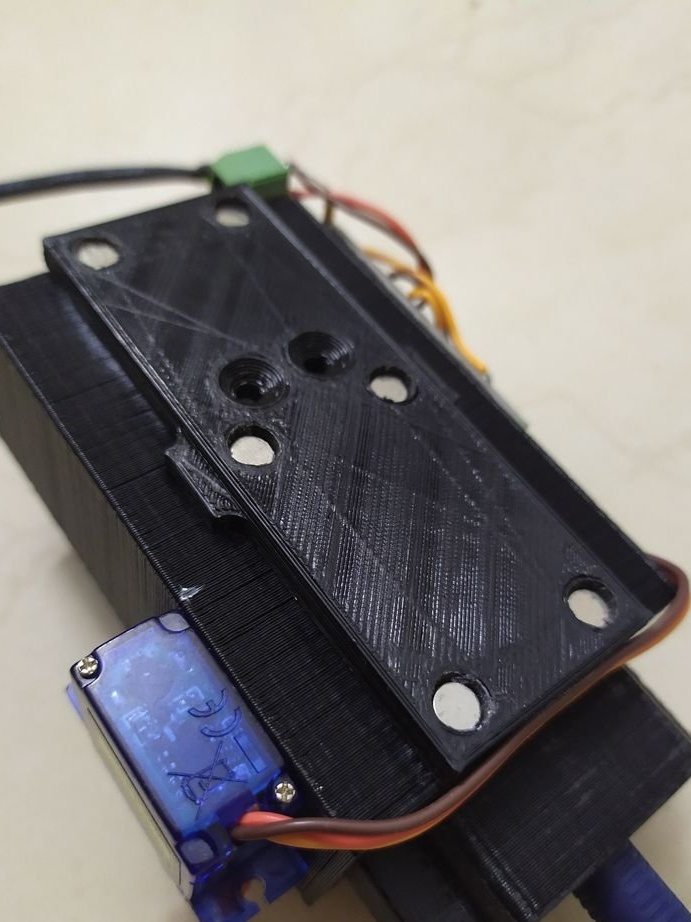
Hakbang Pangwakas: Module ng Laser
Tulad ng ipinahiwatig, sa mga pagtutukoy, ipinatupad ng makina ang isang mabilis na kapalit ng laser module kasama ang iba pang mga executive modules. Para sa mga ito, gumawa ang master ng dalawang hugis-parihaba na bahagi (mga takip). Ang anim na neodymium magnet ay naka-install sa bawat isa. Ang isang takip ay nakalakip sa X axis, ang laser module ay nakakabit sa iba pa.
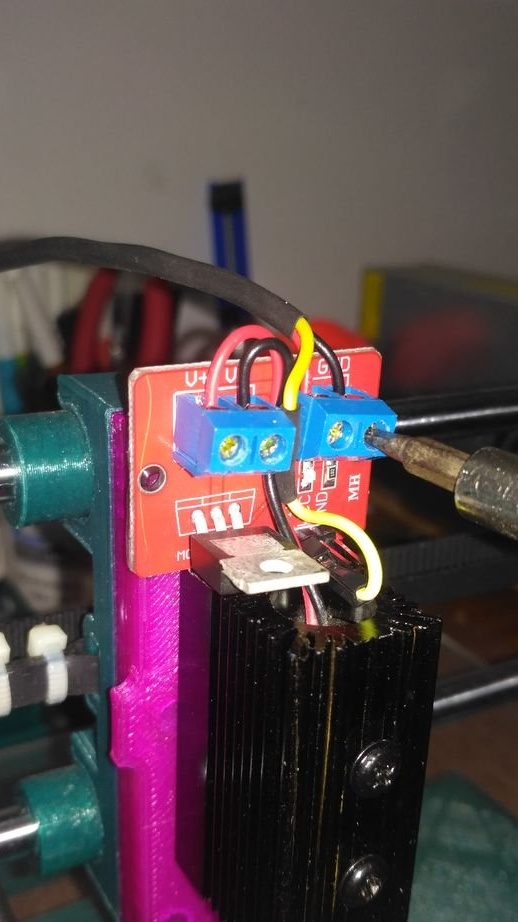
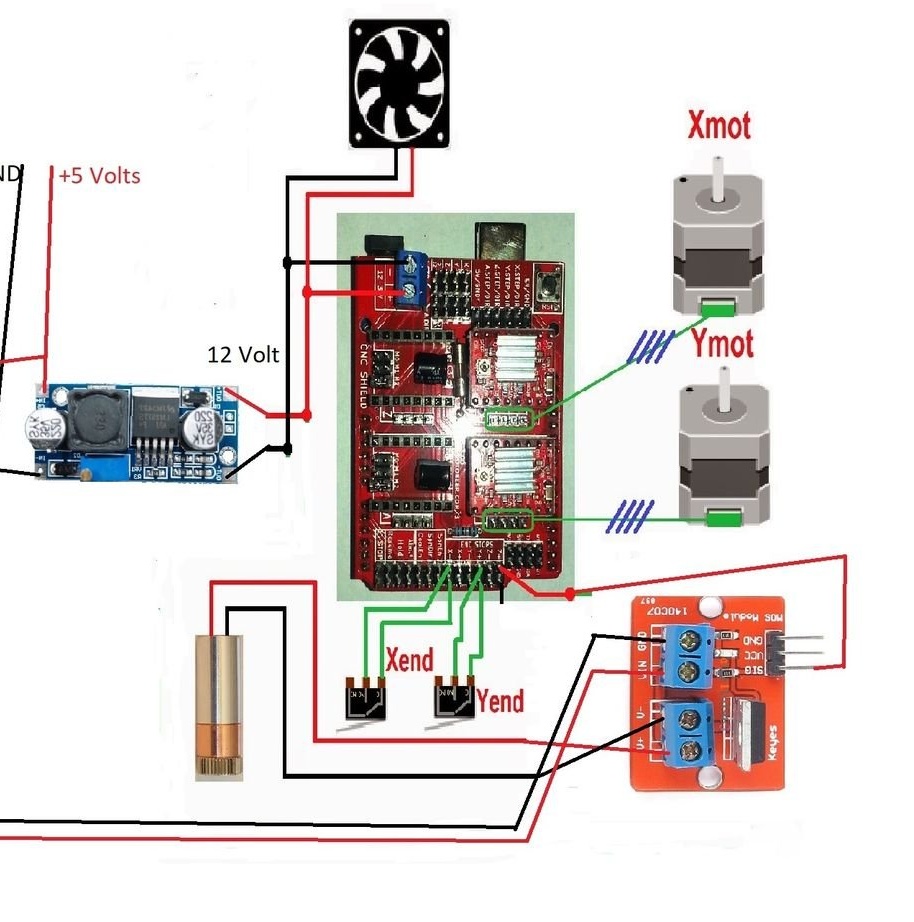
Ang mga wires ay naka-mount tulad ng mga sumusunod.
+ at - ang mga laser ay konektado sa V + at V-, ayon sa pagkakabanggit, ng MOSFET module. Ang kapangyarihan ay konektado sa VCC at GND ayon sa pagkakabanggit. Ang signal wire ay konektado sa signal pin ng MOSFET module.




Hakbang labing-isang: tagapakinig
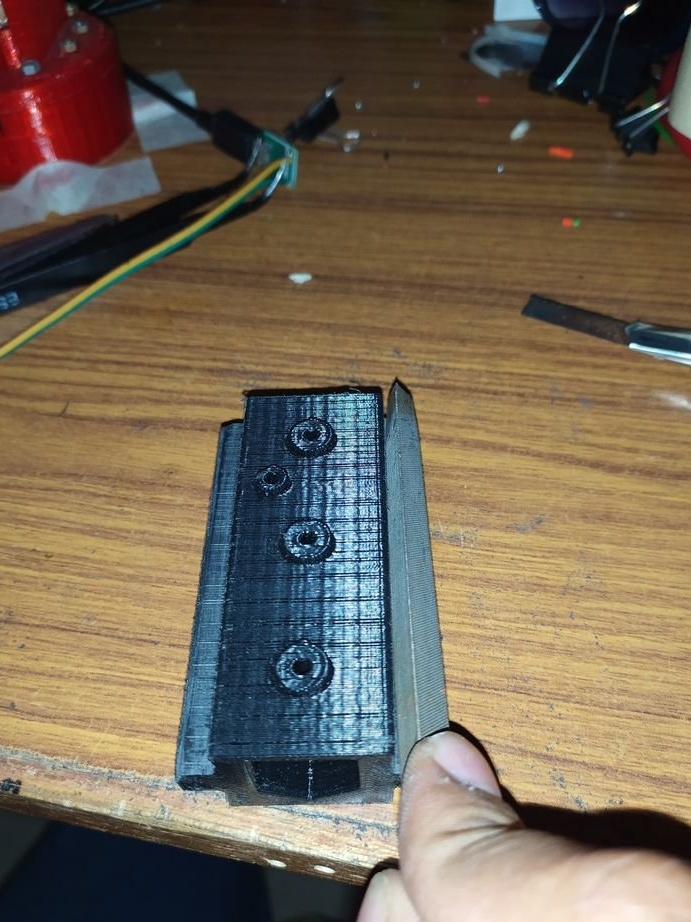
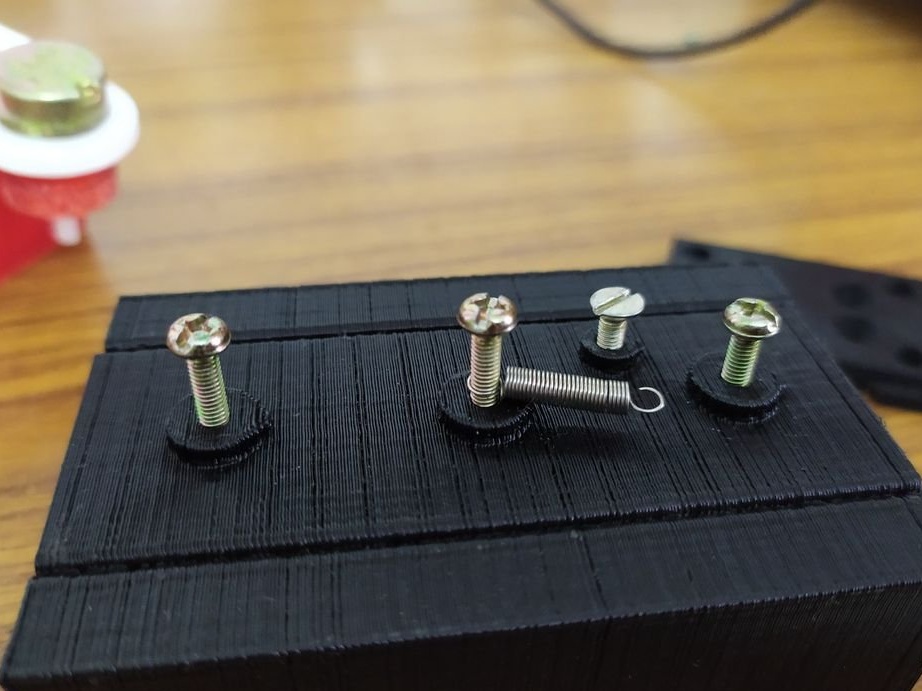
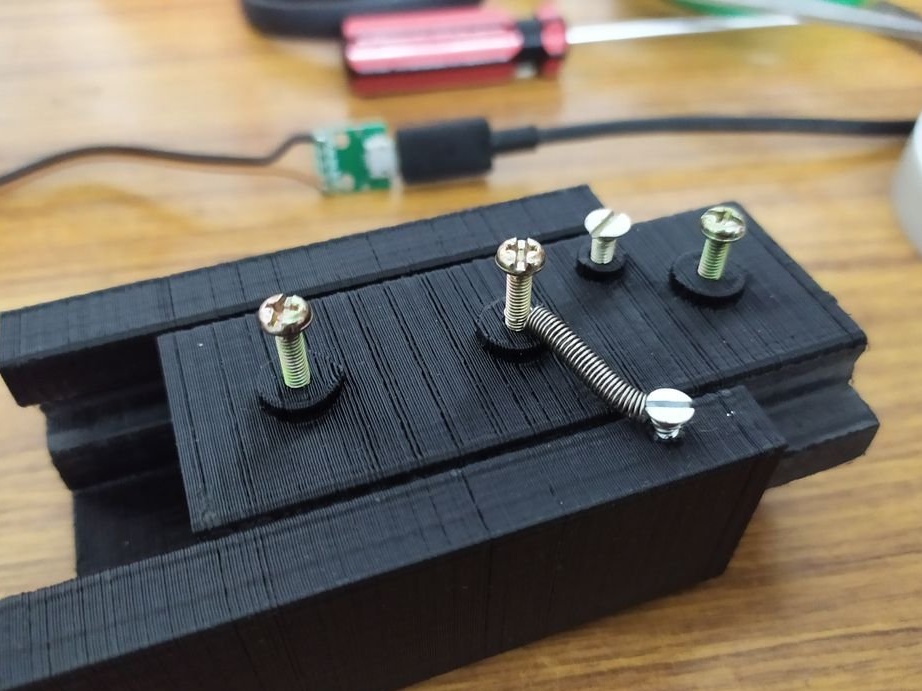
Nangongolekta ng isang taga-plot. Sa sandaling ang parehong mga bahagi ay naka-print, pinanghaharang ng master ang mga eroplano na nakikipag-ugnay sa bawat isa, ay pinapadulas ang mga ito ng isang file at papel de liha, hanggang sa ang parehong mga bahagi ay magkasama nang napakaliit na alitan.



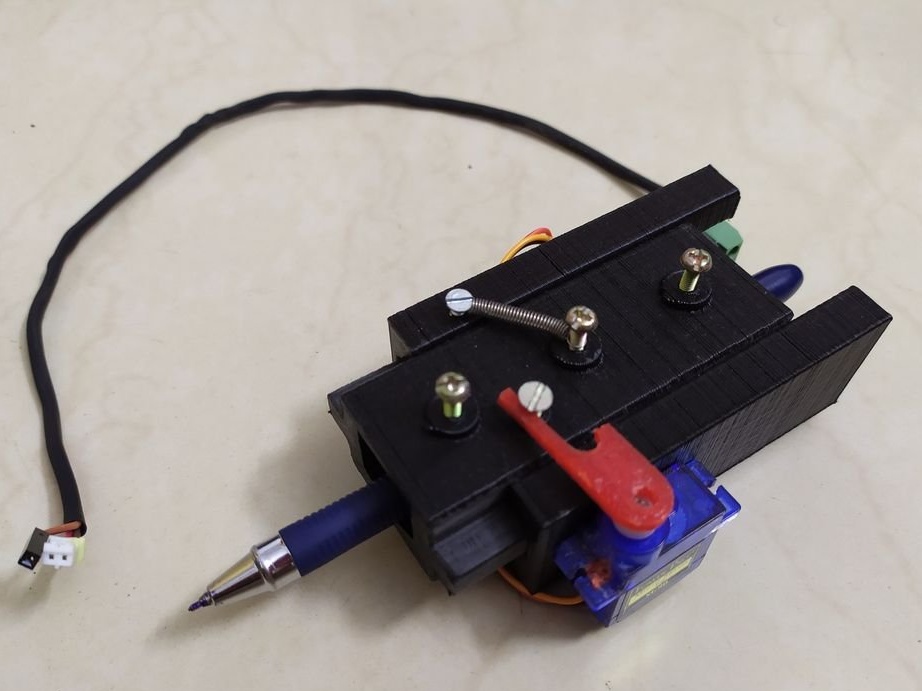
Ngayon ay masikip ang 40 mm M3 screws at itinatakda ang tagsibol.
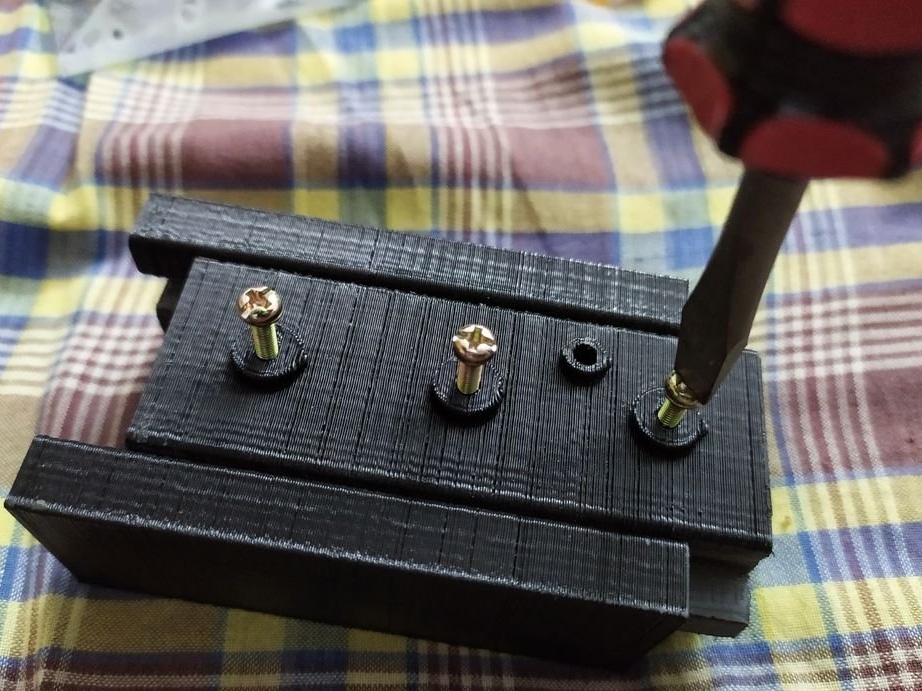
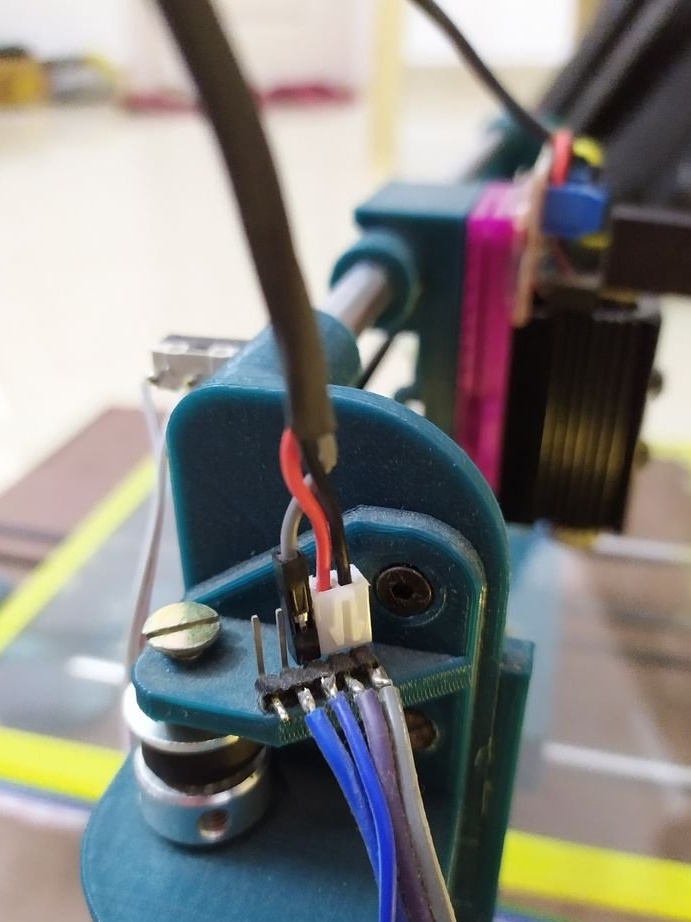
Ang servo motor, mga terminal at Arduino sticks tulad ng ipinapakita sa larawan.
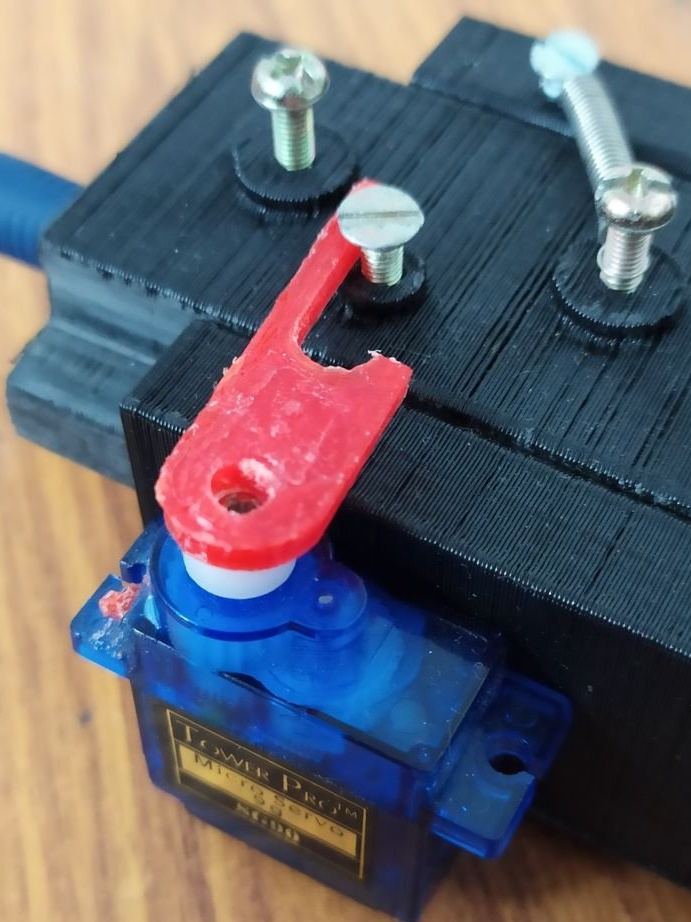
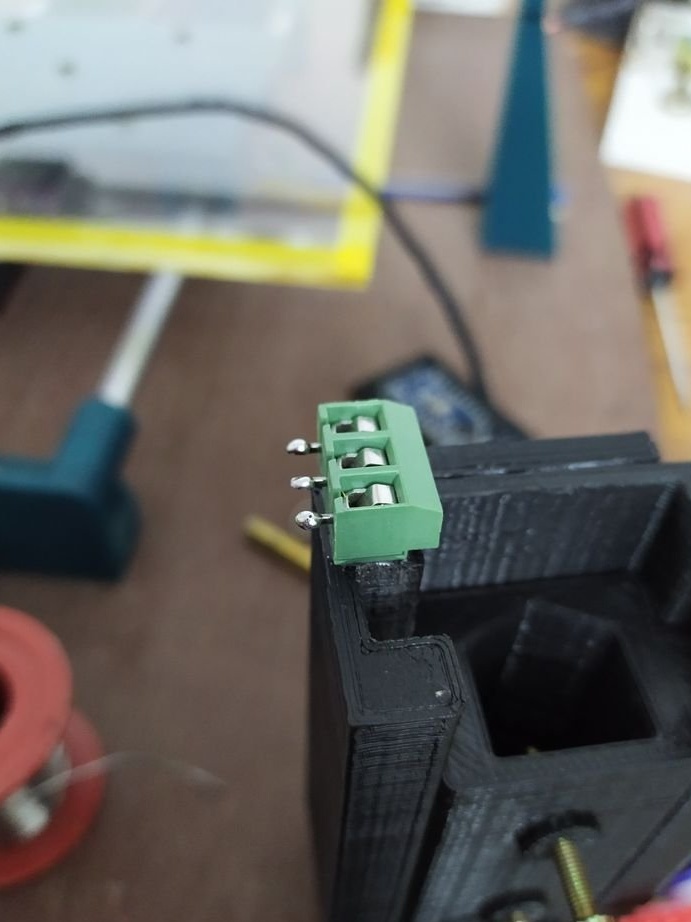
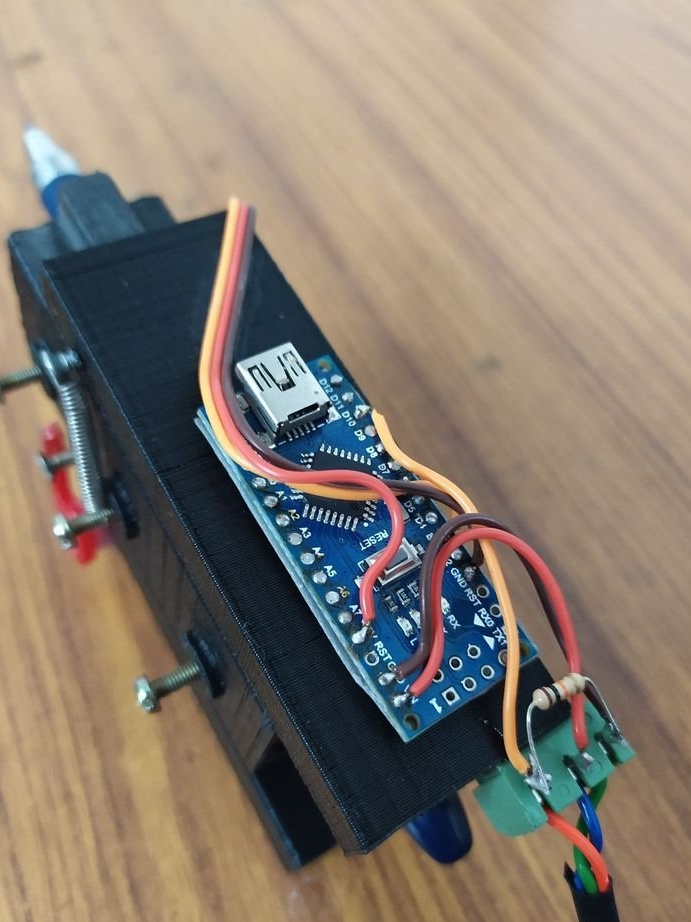
Dito Arduino Ang nano ay ginagamit upang i-convert ang mga signal ng laser control sa mga signal ng PWM na maaaring magmaneho ng micromotor.
Ito ay konektado tulad ng mga sumusunod:
+5 Volt - Vin
-5 Volt - GND
Signal - D10
Servo power + ve - 5V
Servo power -ve - GND
Signal ng Servo - D3
Pagkatapos ay nai-load ang code.
#include Servo myservo;
walang pag-setup ()
{
myservo.attach (3);
pinMode [10, INPUT];
}
walang bisa loop ()
{
kung (digitalRead (10) == Hataas)
{
myservo.write (20);
}
iba pa
{
myservo.write (60);
}
}
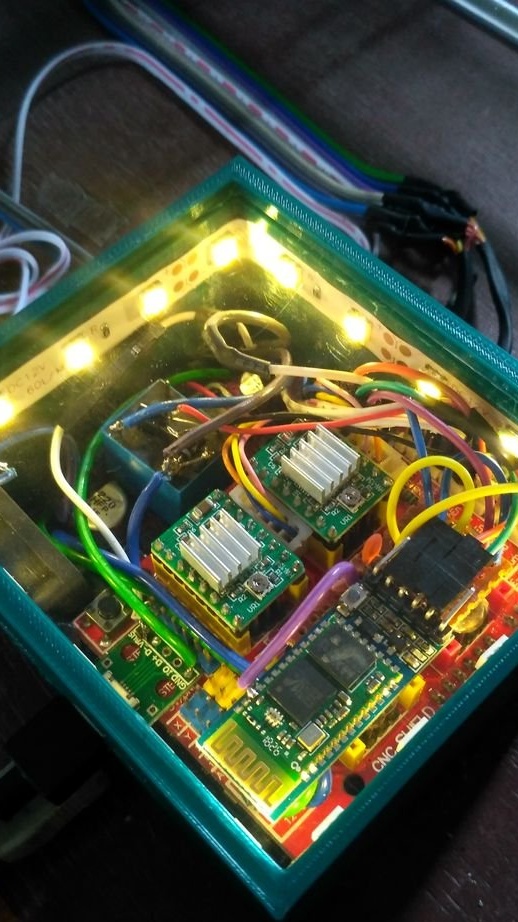
Hakbang Labing: Pag-install
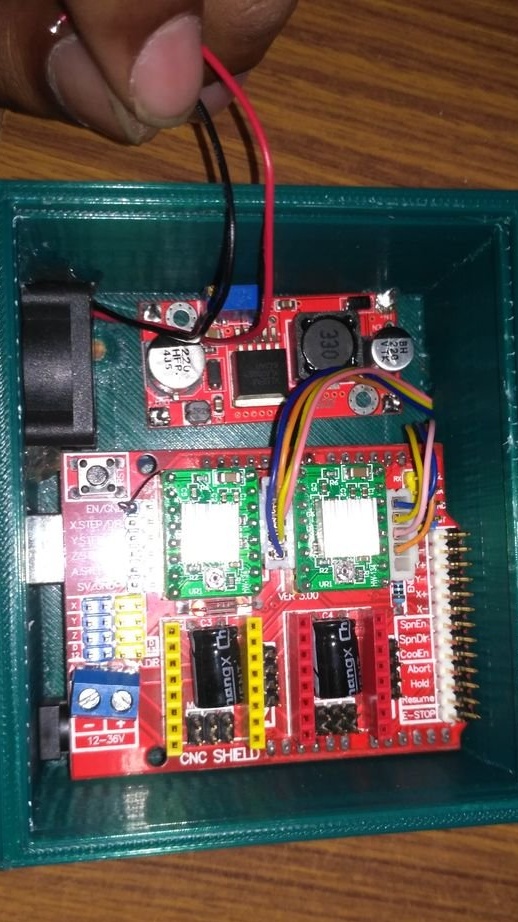
Pag-install ayon sa pamamaraan.
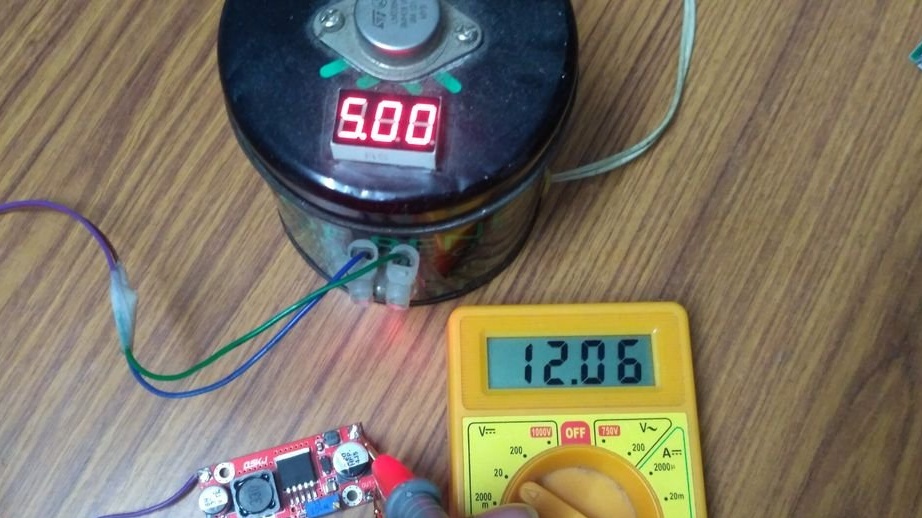
Ang boost converter ay nakatakda sa 12V.
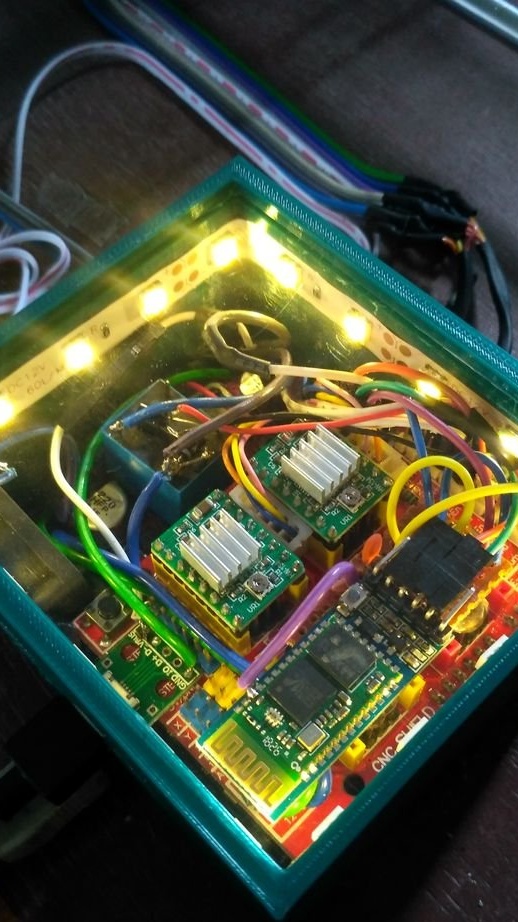
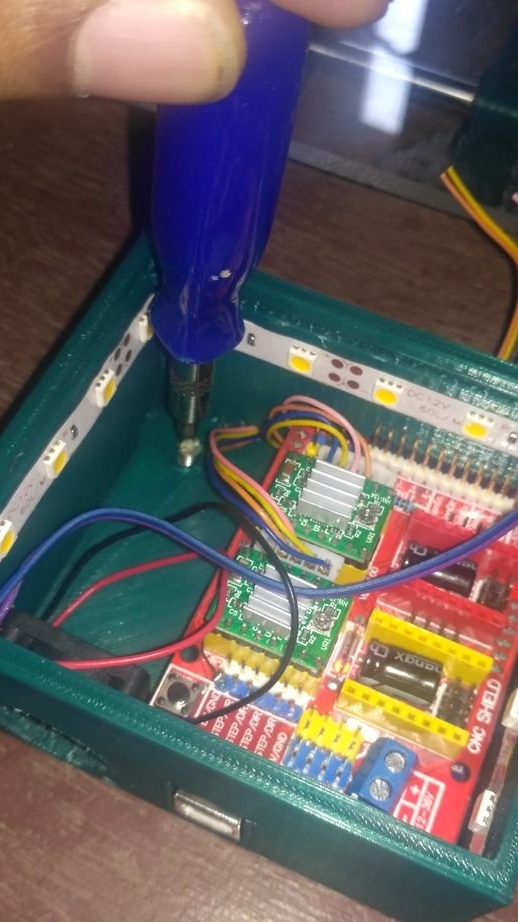
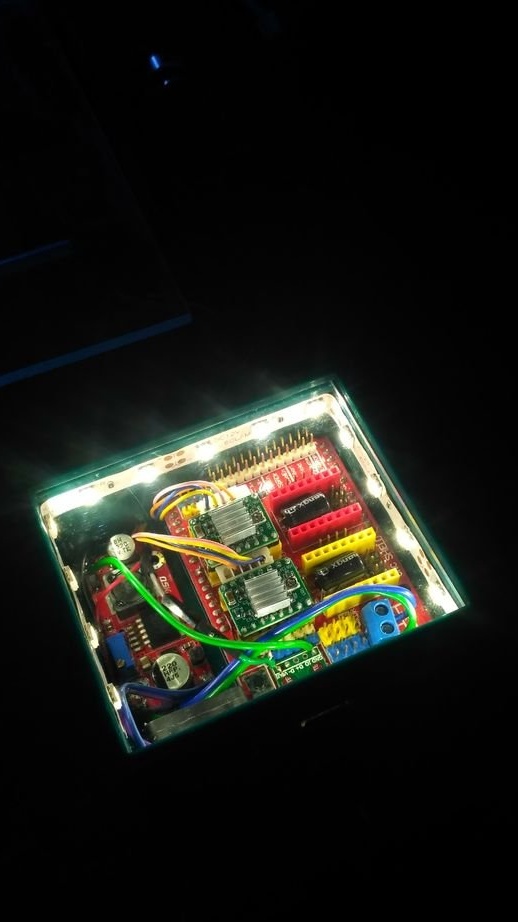
Ang Arduino ay naka-install sa module ng pagpapalawak ng CNC.
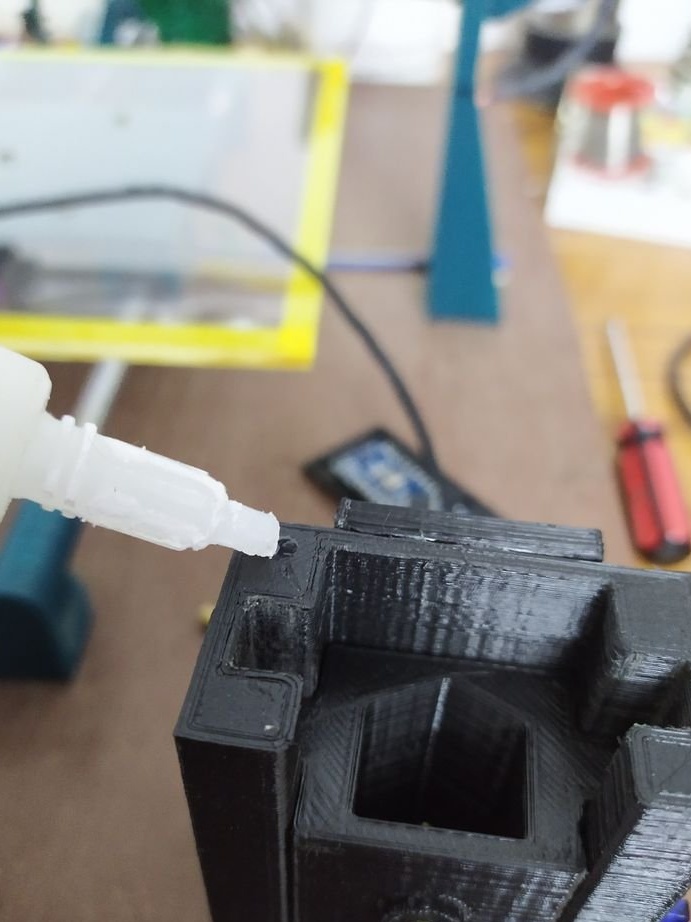
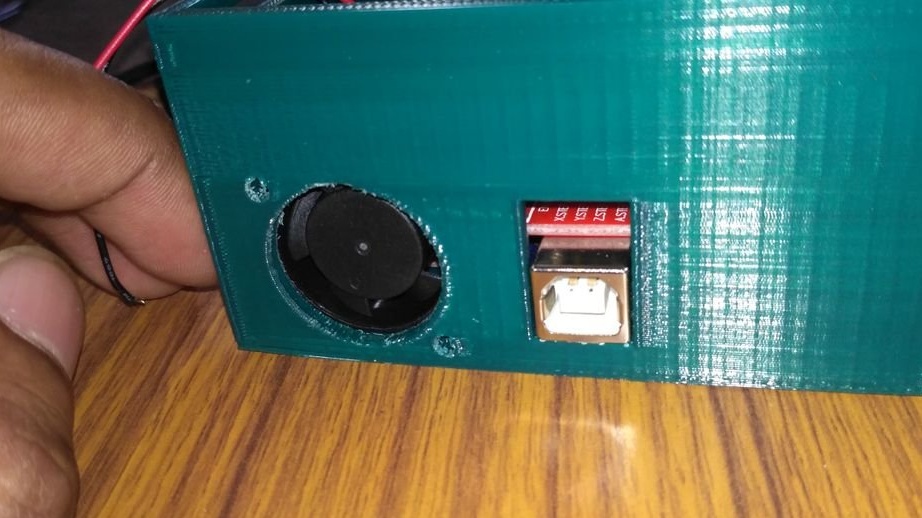
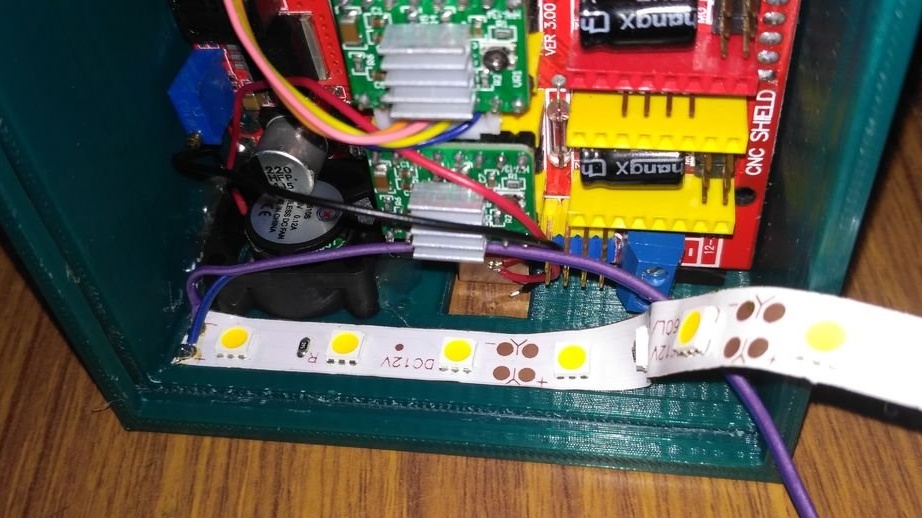
Ang tagahanga ay nakadikit sa butas na ibinigay para sa ito na may mainit na matunaw na malagkit.
Ang isang LED strip ay naidagdag para sa parehong hitsura at indikasyon ng kuryente.
Ang naka-print na kaso ay screwed sa playwud.
Ang isang transparent na acrylic sheet 87 x 75 mm 2 mm makapal ay ginagamit bilang isang takip sa katawan. Maaari itong maipasok sa pamamagitan ng uka na ibinigay para dito sa isang panig ng pabahay.
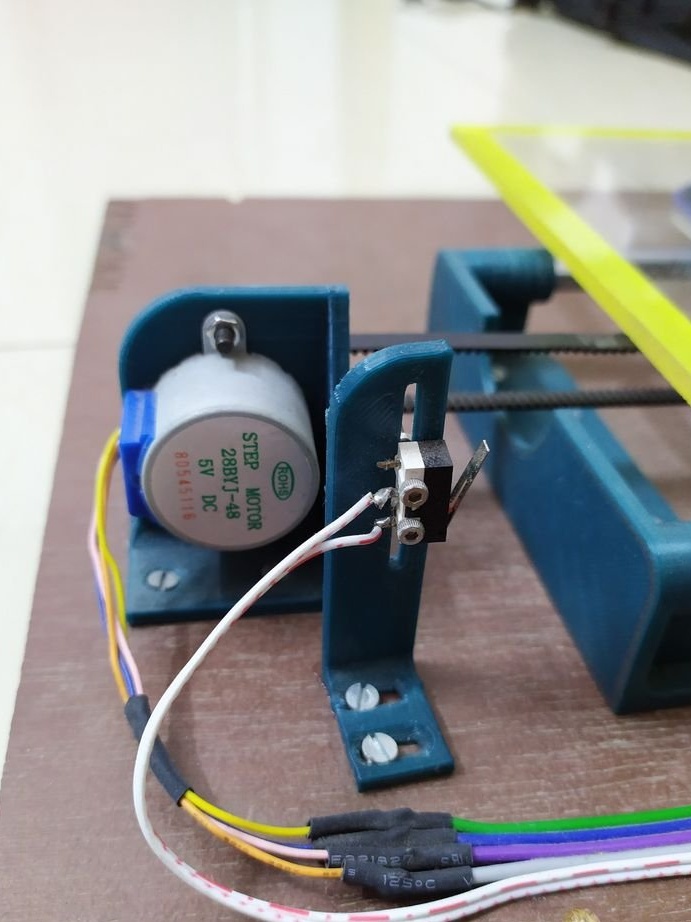
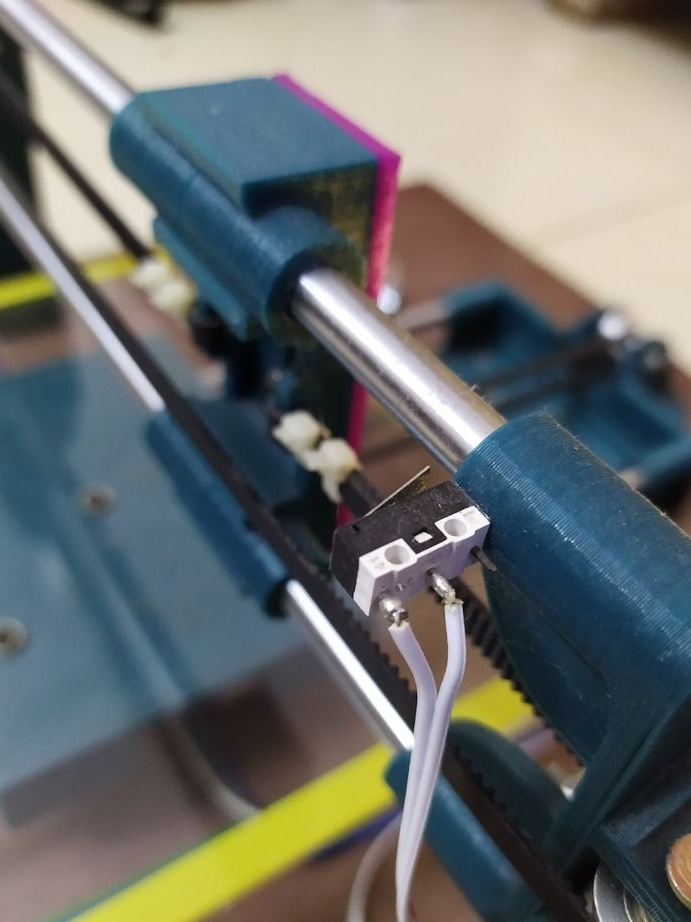
Ang mga limitasyon ng switch ay nakalakip upang ang pindutan ay pinindot 3 mm bago ang mga bearings ng bawat karwahe mabangga sa mga may hawak ng traksyon.
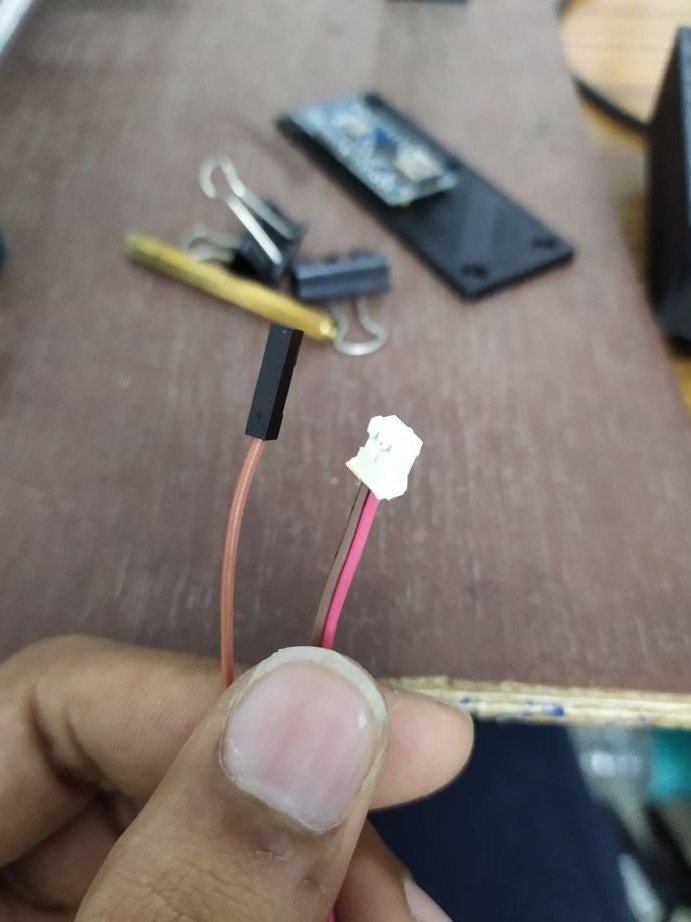
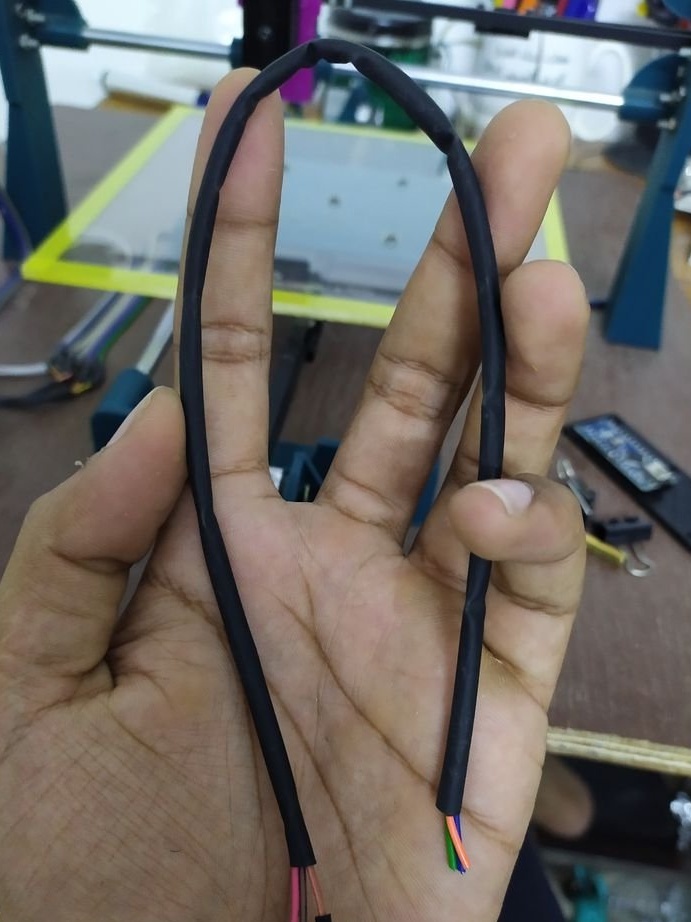
Ang mga wires para sa motorsiklo at mga switch ng limitasyon ay pinahaba at ang mga koneksyon ay insulated.

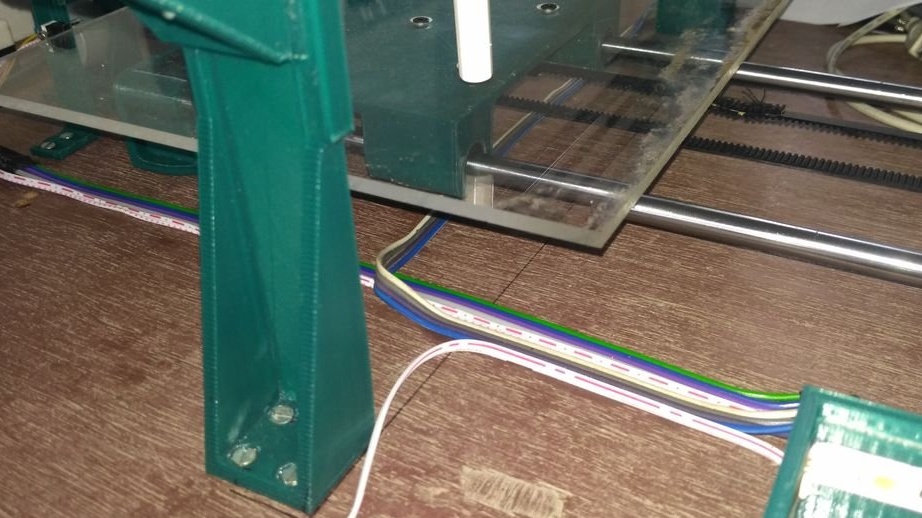
Ang mga wire ay nakadikit sa base ng playwud na may superglue.
Dito, ang boost converter ay ginagamit lamang upang mabigyan ng kapangyarihan ang chips ng driver ng A4988 motor. Ang bawat motor ay gumugol lamang ng 150 mA ng kasalukuyang.
Hakbang Labintatlo: Module ng Bluetooth
Inilalagay ang module ng bluetooth.
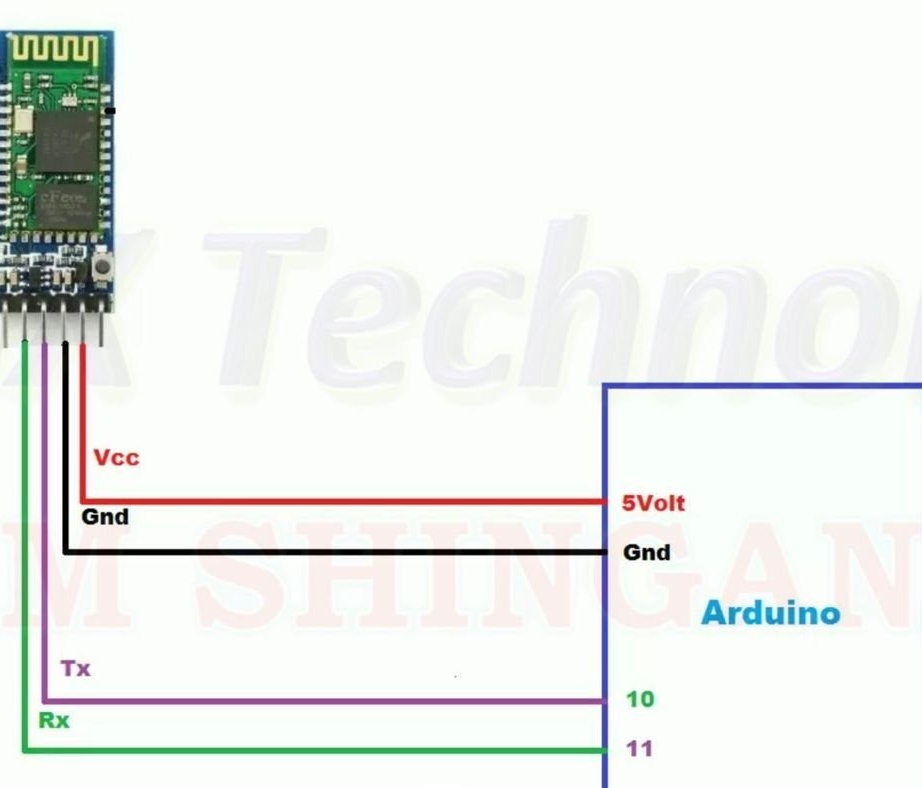
Upang magpadala at tumanggap ng data o, sa kasong ito, ang mga G-code sa pamamagitan ng HC05 Bluetooth module, dapat mo munang i-configure ang module.
Ikonekta ang HC05 module sa Arduino Uno, tulad ng ipinapakita sa unang pigura.
I-download ang code na nakalakip sa hakbang na ito sa Arduino.
BLUE_P.ino
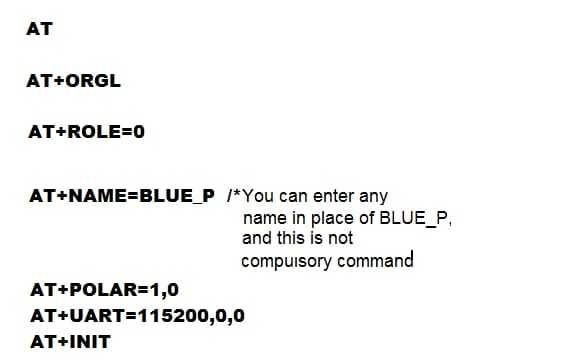
Ipasok ngayon ang mga code na ipinakita sa pangalawang larawan.
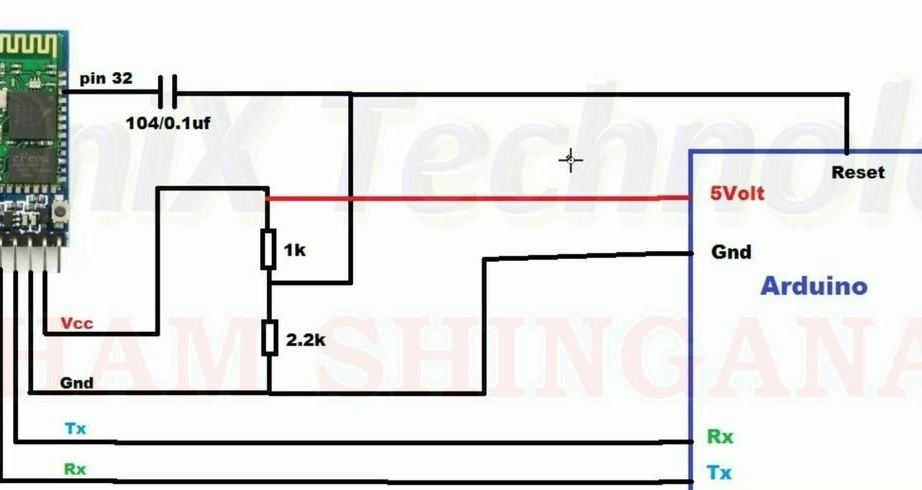
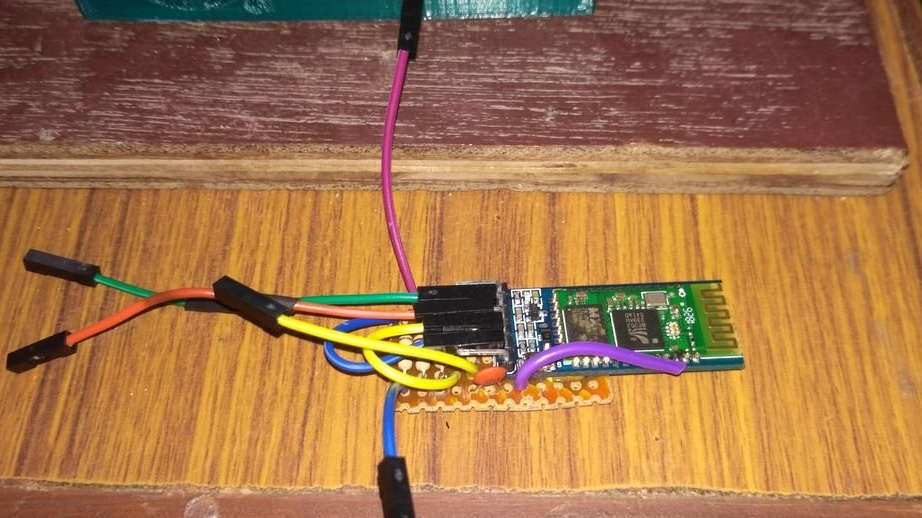
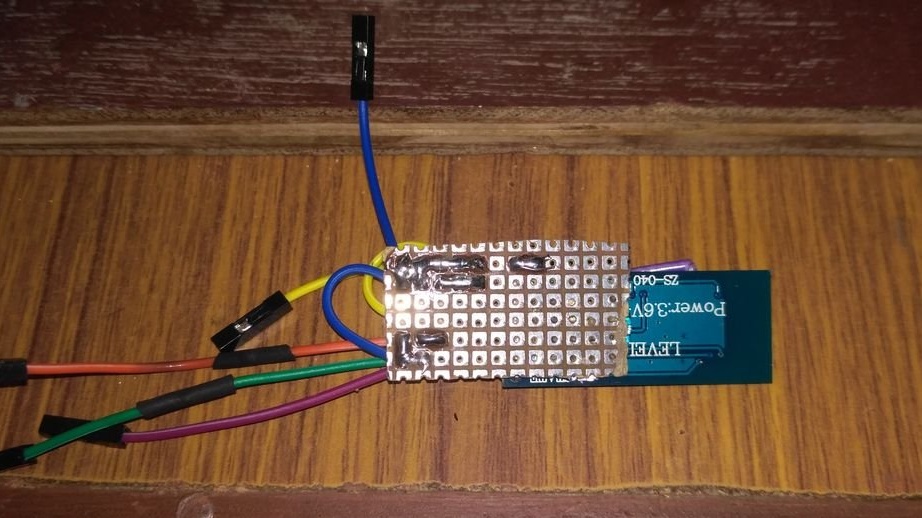
Matapos makumpleto ang mga setting, idiskonekta ang HC05 module mula sa Arduino na ginamit mo para sa programming, at kumonekta sa Arduino CNC Shield alinsunod sa diagram ng circuit sa ika-3 larawan.


Hakbang labing-apat: code at pag-setup
Para sa isang ukit ng laser, ang master ay nag-download ng code.
GRBL.zip
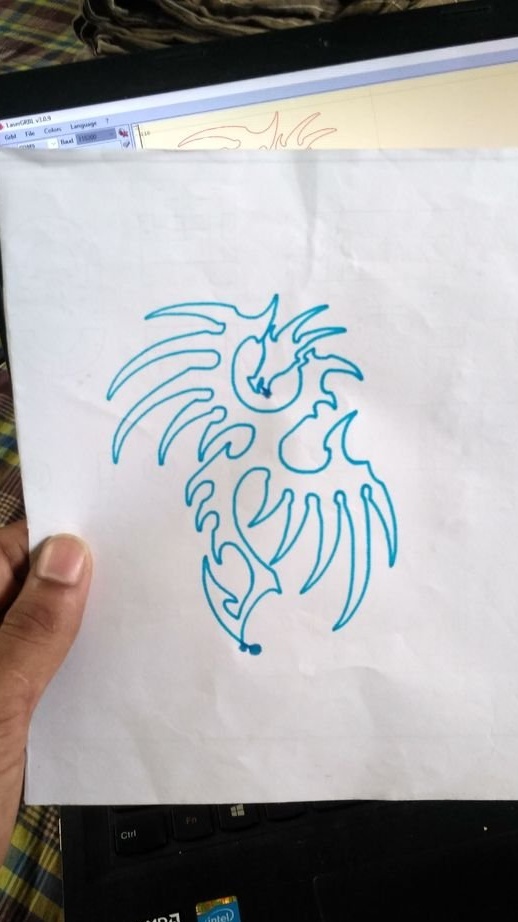
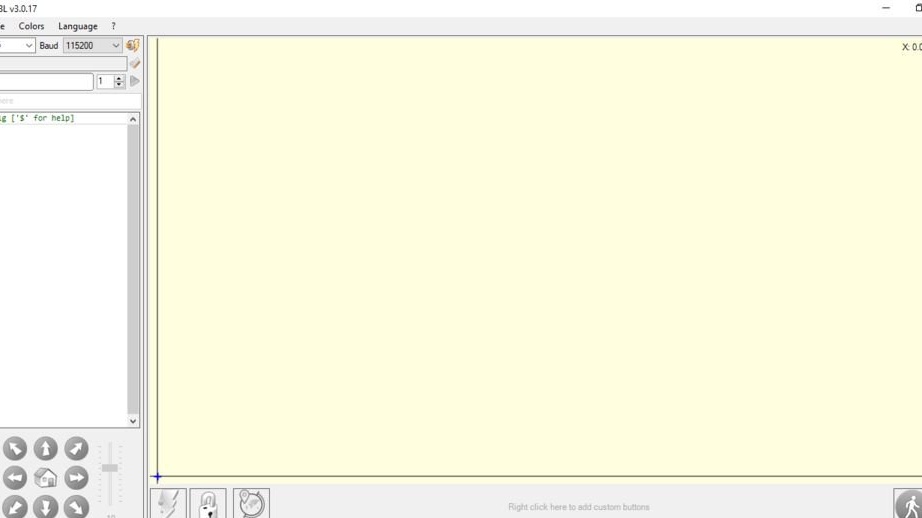
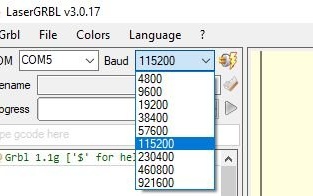
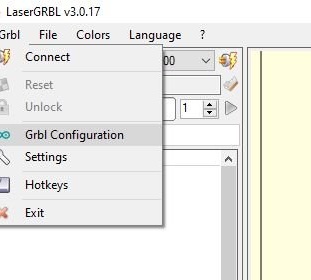
Ang Laser GRBL ay isa sa pinakamahusay na libreng streamer ng G-code para sa mga engraver ng laser. Maaari itong direktang ilipat ang G-code sa Arduino sa pamamagitan ng som port. Mayroon itong built-in na tool upang mai-convert ang mga imahe sa G-code.
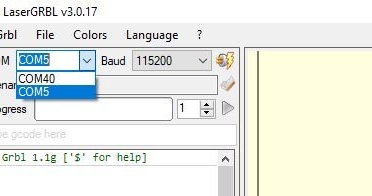
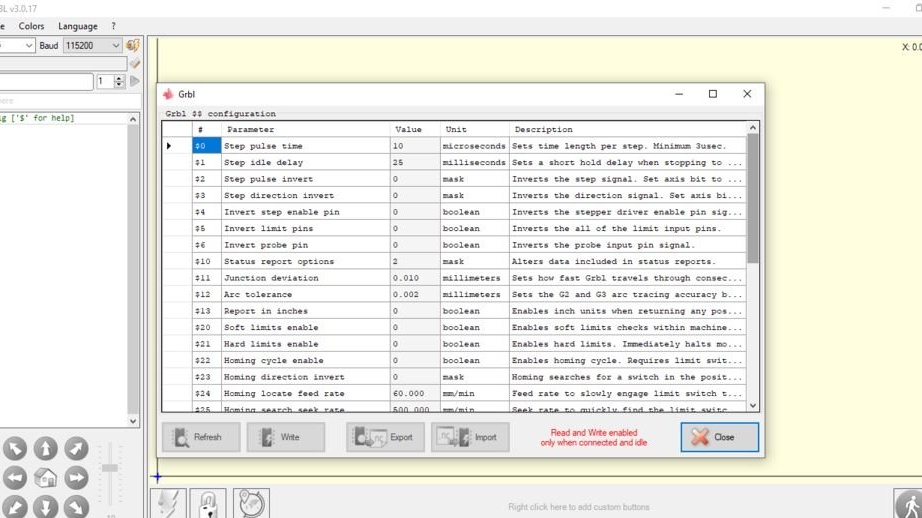
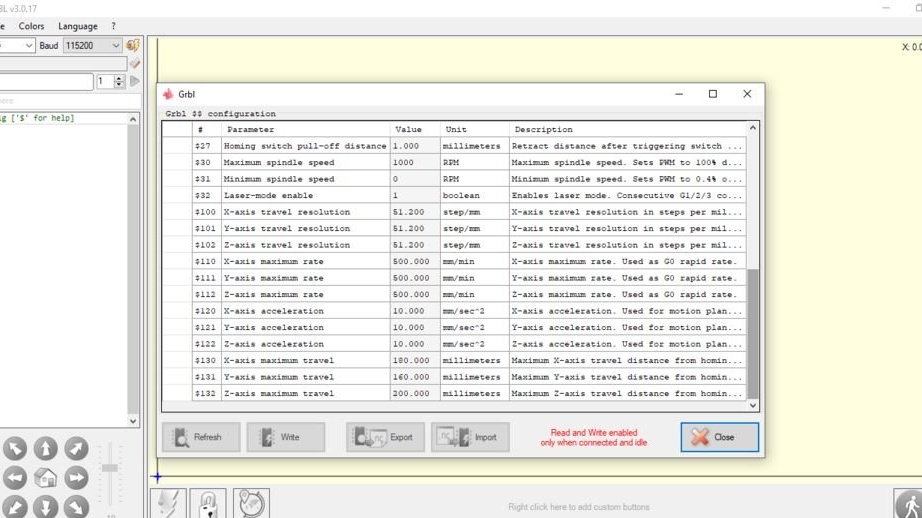
Ang lahat ng mga setting ay dapat gawin tulad ng sa larawan, isinasaalang-alang ang mga sumusunod:
I-install ang port ng catfish ang iyong laser engraver ay konektado.
Ang mga halaga ng pagsasaayos ay maaaring mabago upang umangkop sa iyong pinakamahusay na engraver.
Limang Hakbang: Pagsubok
Matapos na konektado ang laser, oras na upang suriin ang kawastuhan nito.
Mayroong ilang mga bagay upang suriin:
Ang mga X at Y axes ay gumagalaw sa tamang direksyon?
Gumagana ba nang maayos ang homing?
Ang mga hakbang ba ng engine ay lumaktaw dahil sa mataas na pagkiskis o masyadong masikip na sinturon.
Ang mga sukat ba ng nakalimbag na mga imahe ay naaayon sa mga laki na ipinahiwatig sa software. Ang bilang ba ng mga hakbang sa bawat mm ay tumutugma sa ginamit na motor ng stepper.
Ang pag-igting ng sinturon ay maaaring maiakma gamit ang tensioner. Lumiko ang bolt hanggang sa makamit ang tamang pag-igting.
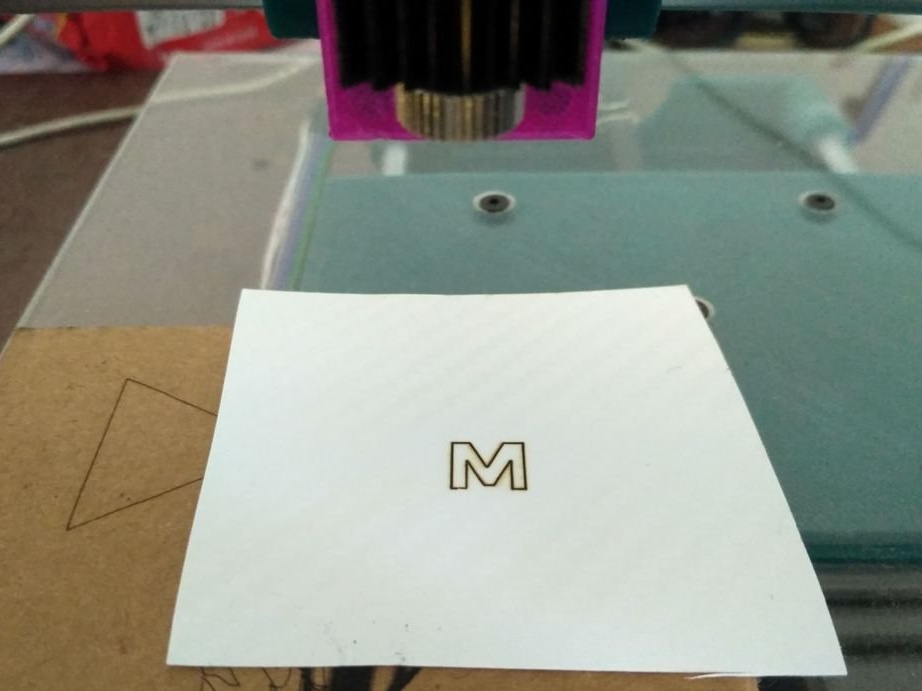
Upang suriin kung ang mga engine ay may mga hakbang at tamang sukat, output isang simpleng tuluy-tuloy na geometric figure, halimbawa, isang parisukat, tatsulok o bilog. Kung ang laser ay nagsisimula mula sa isang punto at huminto ng perpektong sa parehong punto, nangangahulugan ito na ang iyong laser ay hindi nakuha ang isang solong hakbang at perpektong gumagana. Matapos i-print ang tatsulok o parisukat, manu-manong sukatin ang laki nito sa isang pinuno at tingnan kung tumutugma ito sa mga sukat na iyong tinukoy.

Ayon sa panginoon, ganap na nasiyahan siya sa makina.
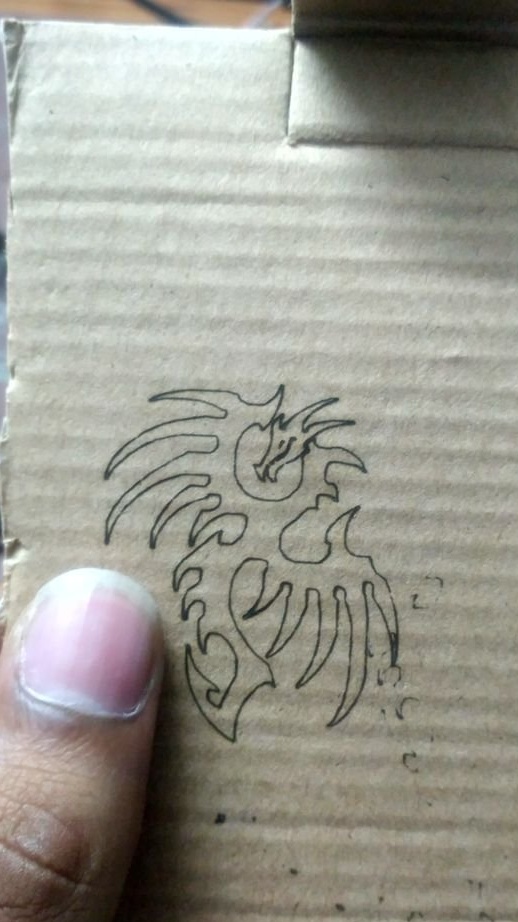
Maaaring mai-ukit sa iba't ibang mga materyales, tulad ng kahoy, karton, katad, plastik, atbp.
Yamang ang makina ay may halos 102 na mga hakbang bawat mm, maaaring gawin ang mga maliliit na ukit.
Ang engraver ay nagtrabaho nang walang mga problema sa USB power supply.