

Gumawa ng isang pares ng mga robot ng sayawan gamit ang mga magnet!
Sa halip na maglaro lamang sa mga magnet na binili ko sa Ebay, sumakay ako ng isang bagay na talagang cool. Kung naglalagay ka ng isang maliit na tagapaghugas ng pinggan sa isang patag na ibabaw at ilipat ang magnet sa isang bilog sa ilalim ng washer, kapansin-pansing baguhin nito ang direksyon ng pag-ikot.
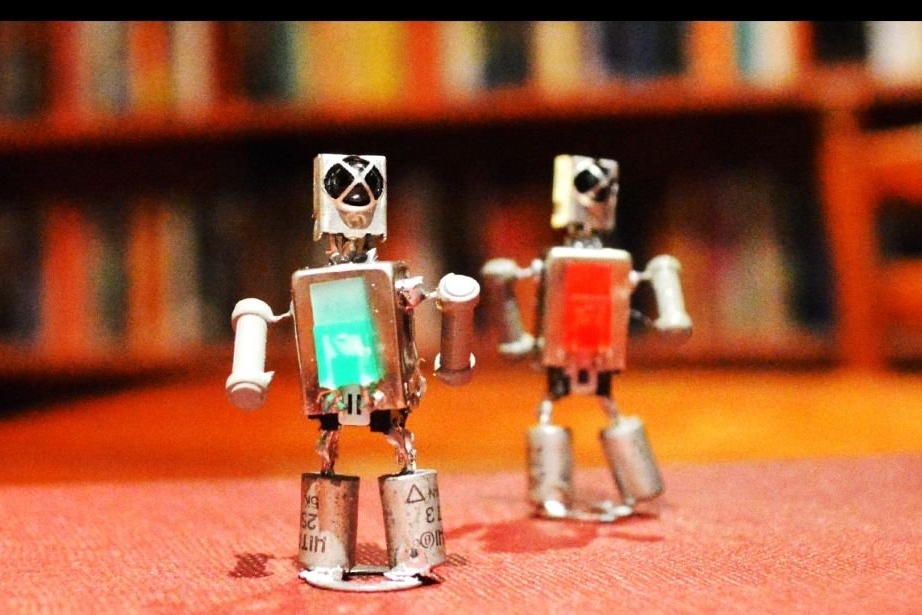
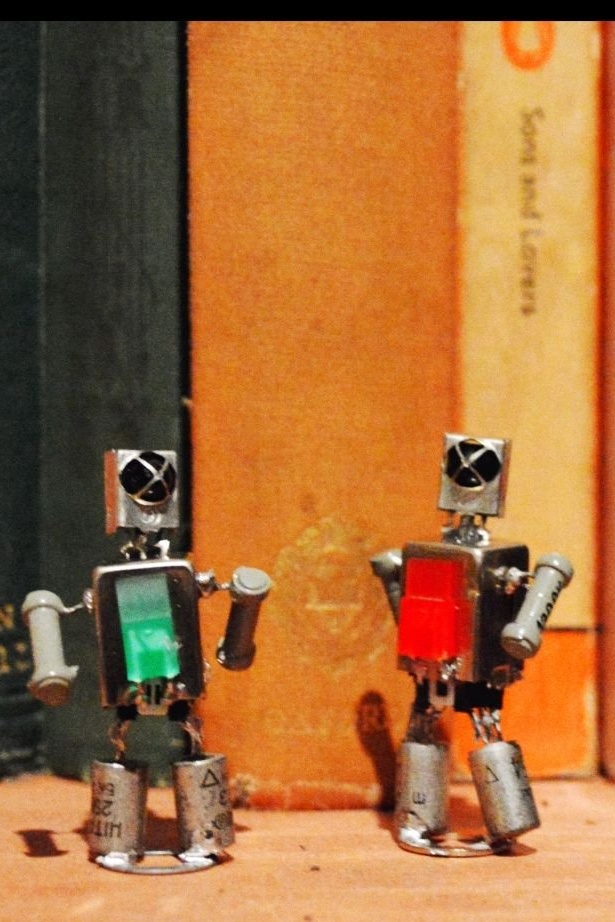
Sa sandaling nakita ko ito, kailangan kong lumikha ng ilang bagong imbensyon. Bilang isang resulta, ito mga robot- mga mananayaw - ang ideya ay hindi gaanong simpleng ipatupad, ngunit ang resulta ay kahanga-hanga lamang! Tila ang mga robot ay tulad ng pagsasayaw ng maliliit na kalalakihan, at kung ano ang mabuti ay ang mekanismo na naglalagay sa kanila sa paggalaw ay hindi nakikita ng lahat.
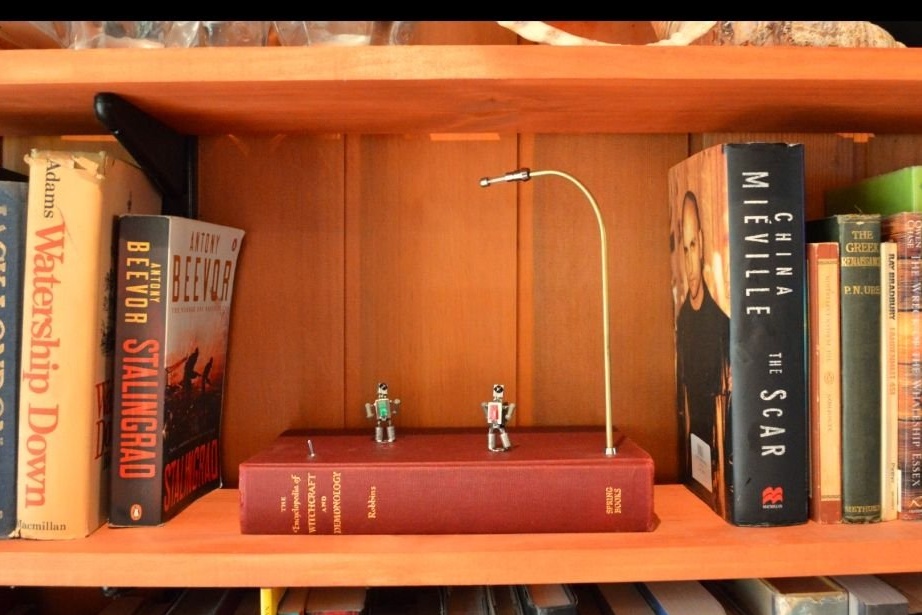
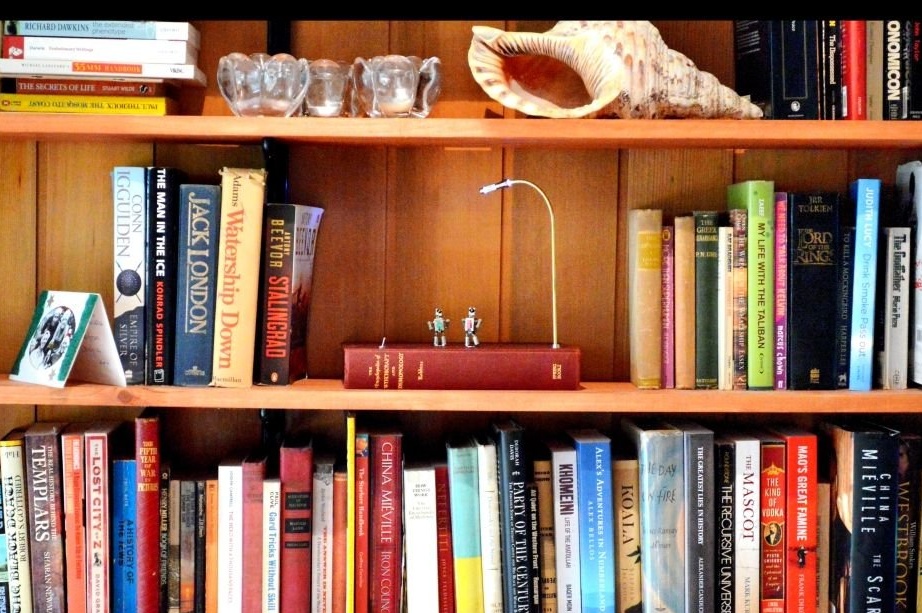
Pinili ko ang libro bilang isang sahig ng sayaw para sa mga robot, dahil gusto ko ang libro bilang isang paninindigan. Maaari kang kumuha ng isang kahoy na kahon o isang karton na kahon kung saan itatago ang motor. Ngunit para sa akin, ang libro ay tila ang pinakamahusay na pagpipilian.
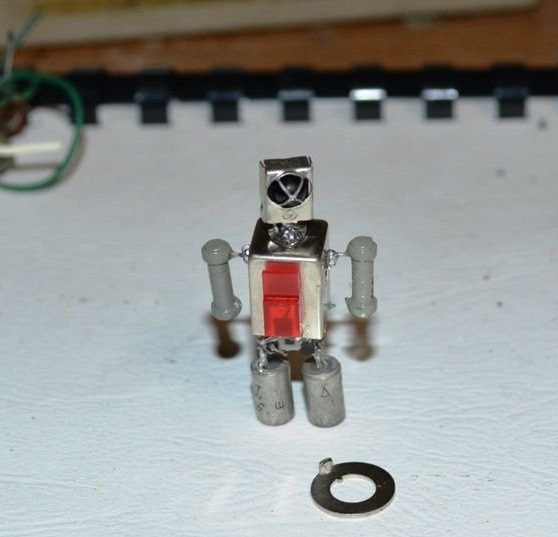
Ganito ang hitsura ng mga robot "sa kilos":
At narito kung paano sila ginawa ...
Hakbang 1: Pagtitipon ng mga Bahagi



Mga Materyales
- libro ng hardcover
- gear motor 3V, 15 rpm
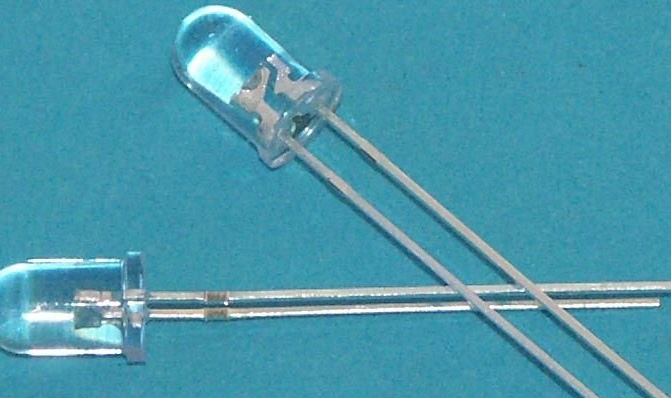
- puting LED switch
- 2 humahawak ng LED
- lumang piyus
- tubo ng tanso - tanso wire (manipis)
- kawad
- 2 magnet
- may hawak ng baterya
- switch ng pingga
- lumang mga de-koryenteng bahagi: resistors, transistors, potentiometer - lahat iyon. Mula sa lahat ng ito, ibenta namin ang aming mga robot.
- 2 tagapaghugas ng pinggan, kasing manipis at makintab hangga't maaari.
Mga tool:
- mainit na pandikit
- paghihinang bakal at panghinang
- mga tagagawa
- kutsilyo ng konstruksyon
Hakbang 2: paggawa ng robot - mga binti


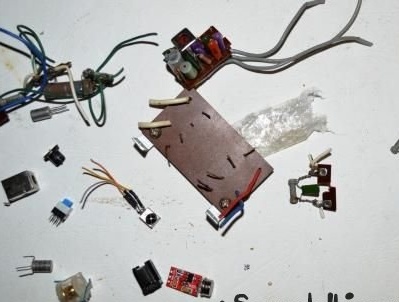




Anong mga bahagi ang dapat na binubuo ng robot ay nasa iyo. Tingnan kung ano ang nasa bahay kung saan posible na maibenta ito - ang mga lumang de-koryenteng sangkap, ekstrang bahagi mula sa radyo, ang lahat na hindi kinakailangan mula sa ito ay maaaring magamit sa proyektong ito.
Upang magsimula, pagsamahin ang lahat ng mga ekstrang bahagi na, sa iyong opinyon, ay angkop para sa pagpupulong ng robot. Eksperimento sa mga detalyeng ito upang piliin ang pinakamahusay.
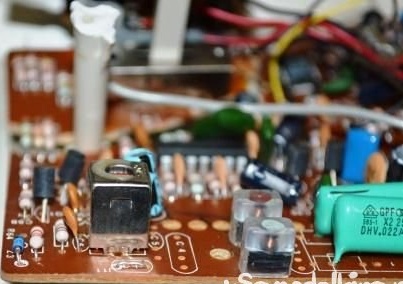
Mayroon akong isang lumang amplifier, na nahanap ko sa basurahan ng isa sa mga kapitbahay, at mayroon itong lahat na kailangan para sa mga robot.
Mga Hakbang:
1. Magtipon ng mga bahagi sa isang lugar
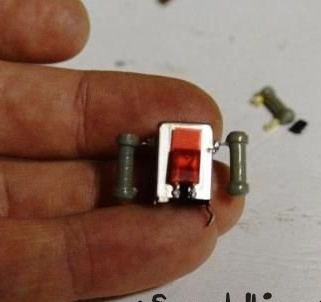
2. Para sa mga binti, gumamit ako ng isang pares ng mga transistor, na ibinebenta ko sa switch, tulad ng ipinapakita sa larawan sa itaas.
3. Pagkatapos nito, ibaluktot ko ng kaunti ang mga transistor upang magbigay ng isang hugis na katulad ng mga binti.
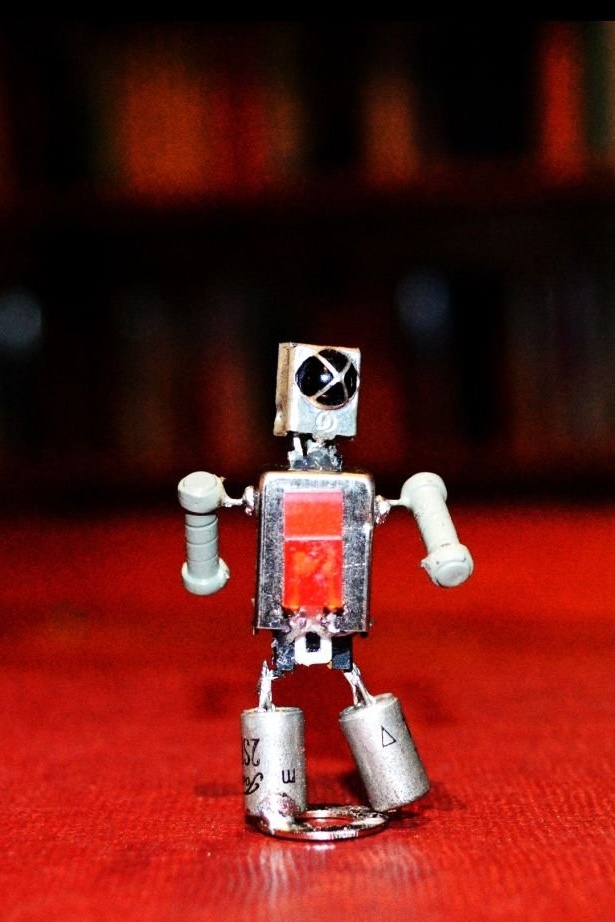
Hakbang 3: Ang pagsabit sa mga bisig at katawan ng tao




Mga Hakbang:
1. Bilang isang katawan, kinuha ko ang lumang potensyomiter. Inalis ko ang mga insekto, at ginamit ang katawan bilang isang katawan.
2.Isinakip ko ang isang pares ng mga resistor sa "katawan" bilang mga kamay. Kailangang kumurap ako sa paghihinang ng aking mga kamay sa katawan, ngunit nakakuha pa rin ako. Para sa mas mahusay na paghihinang, painitin ang kaso sa isang paghihinang bakal at magdagdag ng isang bola ng panghinang dito bago mo subukang mag-attach ng isang risistor. Dapat itong makatulong.
3. Ibinebenta ko ang lumang diode sa harap, dahil gusto ko ang mga robot sa istilo ng retro. Na-sold ko lang ang mga diode contact sa kaso at pinutol ang labis.
Hakbang 4: Idagdag ang natitirang mga detalye.



Mga Hakbang:
1. Pagkatapos ay ginawa ko ang mga ulo ng mga robot. Naisip ko ng mahabang panahon kung ano ang dapat gawin bilang isang ulo, at sa huli pinili ko ang lumang phototransistor (tila ito ay ito!).
2. Pinutol ko ang mga kable at ikinakabit ang phototransistor sa katawan gamit ang mainit na pandikit.
3. Pagkatapos ay tinapik ko ang aking mga binti at katawan sa parehong paraan.
4. At sa wakas, naibenta ko ang isang maliit na tagapaghugas ng pinggan sa aking mga paa. Ito ang pinakamahalagang bahagi, dahil ito ang puck na gagawa ng aming mga robot dancers!
Tandaan: Ang mga washers na ginamit ko ay napaka manipis at mahusay na makintab. Ito ay talagang mahalaga, gumamit ng manipis hangga't maaari mga tagapaghugas ng pinggan. Ang mas makapal na tagapaghugas, na sinubukan ko rin, ay nagbigay ng pinakamasama epekto, ay hindi gumana ayon sa nararapat.
5. Ibinenta ko ang aking mga binti upang mabigyan ang robot ng epekto ng isang gumagalaw na tao, nakikita mo ang mga pagbabagong ito sa mga litrato mula sa hakbang na ito.
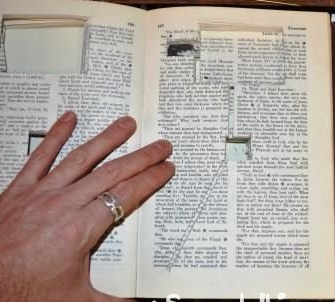
Hakbang 5: Paghahanda ng libro - ginagawa ang unang hiwa
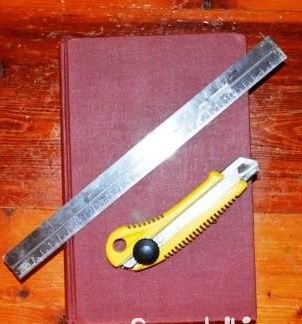



Ang susunod na hakbang ay upang mahanap ang tamang libro para sa pag-embed ng baterya, motor at magneto. Narito ang pinakamahalagang punto ay ang kapal ng libro. Dapat itong sapat upang magkasya ang lahat ng mga bahagi na ito papasok. Marami akong mga libro, kaya ang paghahanap ng tama ay madali (ang pinakamahirap na bahagi ay pinuputol lamang ang mga blangko mula sa libro para sa lahat ng mga ekstrang bahagi!)
Mga Hakbang:
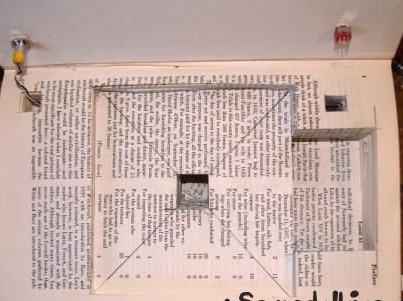
1. Iguhit muna ang isang parisukat sa gitna ng libro. Ito ay kung saan ilalagay namin ang motor at magneto sa ibang pagkakataon.
2. Simulan ang pagputol ng mga pahina sa mga bahagi, at huminto kapag naabot mo ang lalim ng mga 10 mm.
3. Sa gitna ng cut square, sukatin ang isa pang 15x15 mm square. Gumamit ng isang kutsilyo sa konstruksyon, at gupitin ang mas maliit na parisukat na ito sa pinakadulo na pabalik.
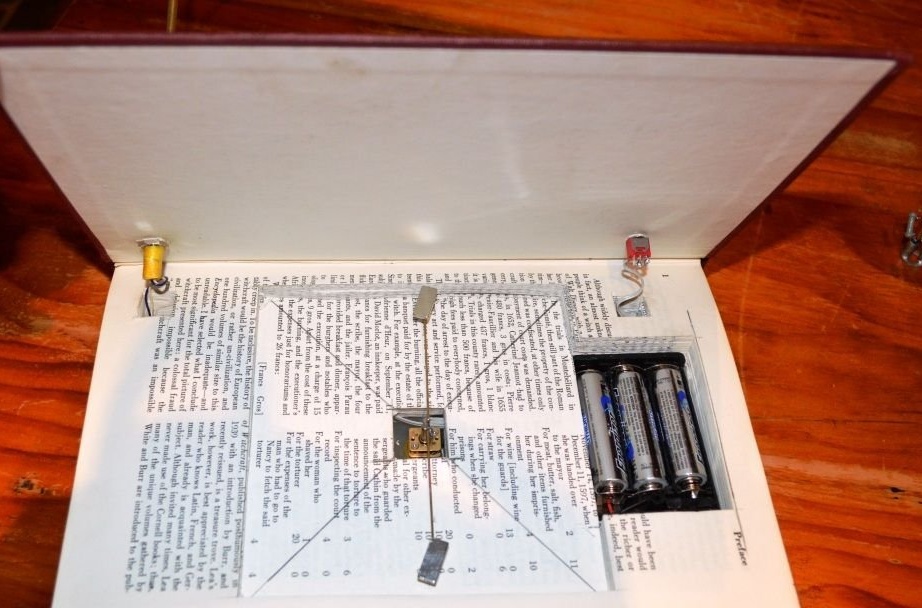
Hakbang 6: pinupuno namin ang libro - na-embed namin ang baterya





Mga Hakbang:
1. Markahan ang lokasyon para sa mga baterya.
2. Gupitin ang bingaw sa mga pahina upang ang mga baterya ay magkasya sa loob.
3. Gupitin ang isang maliit na "channel" sa libro upang kumonekta sa motor, tulad ng ipinapakita sa larawan sa itaas. Sa channel na ito ang mga wire mula sa baterya hanggang sa motor.
4. Dumating ang oras upang ikonekta ang baterya. Kakailanganin mo ng 3 mga wire. Gumamit ako ng isang computer cable, pinagsama ang 3 wires, tulad ng ipinapakita sa larawan. Isang kable na konektado
- lumipat
- sa motor
- diode
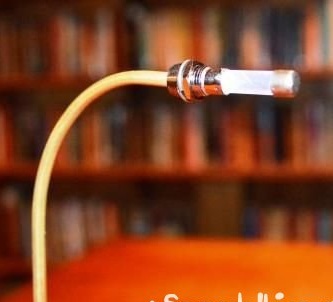
Hakbang 7: Nasaksak namin ang Aklat - Idagdag ang Liwanag at ang Lumipat







Ngayon ay kailangan mong idagdag ang on / off switch at ang ilaw. Sa katunayan, ang pag-iilaw ay isang opsyonal na sangkap, kaya nasa sa iyo na magpasya kung gagawin ito o hindi.
Mga Hakbang:
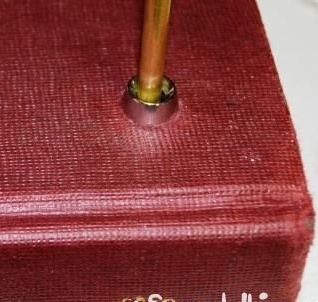
1. Bend ang tanso pipe tulad ng ipinakita.
2. Hilahin ang isang wire sa pamamagitan nito, tiyaking mayroong isang supply ng wire sa magkabilang dulo.
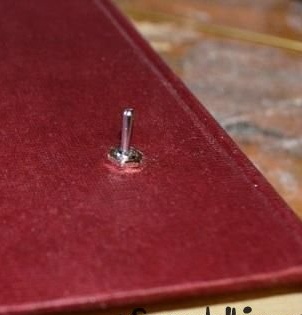
3. Sa flat dulo ng tubo, naayos ko ang may-hawak para sa diode. Ito ay kinakailangan upang ilakip ang tubo sa libro.
4. Mula sa kabilang dulo, naayos ko rin ang may-hawak para sa diode, ngunit kabaligtaran. Naglakip din ako ng isang piyus sa dulo ng may-hawak, na pinutol ang dating tip sa isang metal. Ipinasok ko lang ang glass fuse tube sa may diode holder.
5. Pagkatapos ay kailangan mong ikonekta ang diode sa dulo ng tubo ng tanso, isara ito lahat gamit ang may diode na may fuse sa dulo.
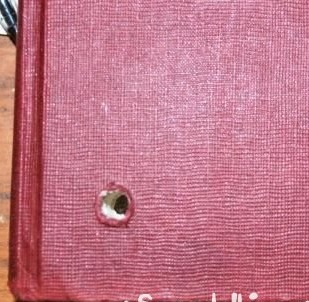
6. Susunod, kailangan mong mag-drill ng 2 butas sa libro. Ang isa ay para sa switch, at ang pangalawa para sa lampara. Ang parehong mga butas ay dapat na malapit sa bawat isa.
7. Muli, gumawa ng dalawang mga channel sa libro para sa mga wire, tulad ng ipinapakita sa larawan.
Hakbang 8: pinupuno namin ang libro - na-embed namin ang motor





Mga Hakbang:
1. Habang abala ako sa motor, nagpasya akong magdagdag ng isang salansan dito, na nakatulong sa perpektong isama ito sa libro.
2. Nag-tap din ako ng mga pahina kung saan inilagay ko ang mga channel para sa mga wire. Ang libro ay pinutol at pababa, kaya hindi ito mababaw upang palakasin ang disenyo sa pamamagitan ng gluing ng mga hiwa na pahina ng PVA o clerical glue.
3. Ilagay ang motor sa gitna ng bingaw sa gitna ng libro at secure na may mainit na pandikit. Ang motor ay dapat na mahigpit na "umupo sa libro", kung hindi, balutin ang motor ng mga de-koryenteng tape.
3. Ikonekta ang mga wire sa switch at ang lampara ng diode.
4. Kailangan mo ring magdagdag ng isang pingga sa motor.Magkakaroon ng mga magnet sa magkabilang dulo ng pingga. na magtatakda ng robot sa paggalaw. Una ibaluktot ang pingga tulad ng ipinapakita sa larawan. Pagkatapos ay itakda ang pingga papasok upang ito ay umiikot sa loob ng mas malaking slotted square.
5. Mga magnet na pandikit sa mga dulo ng pingga na may mainit na pandikit. Itinakda ko ang mga magnet sa isang bahagyang anggulo upang matulungan ang aking mga robot na sumayaw.
6. Ilagay ang pingga sa motor tulad ng ipinakita sa itaas.
Hakbang 9: Tapos na ang trabaho!
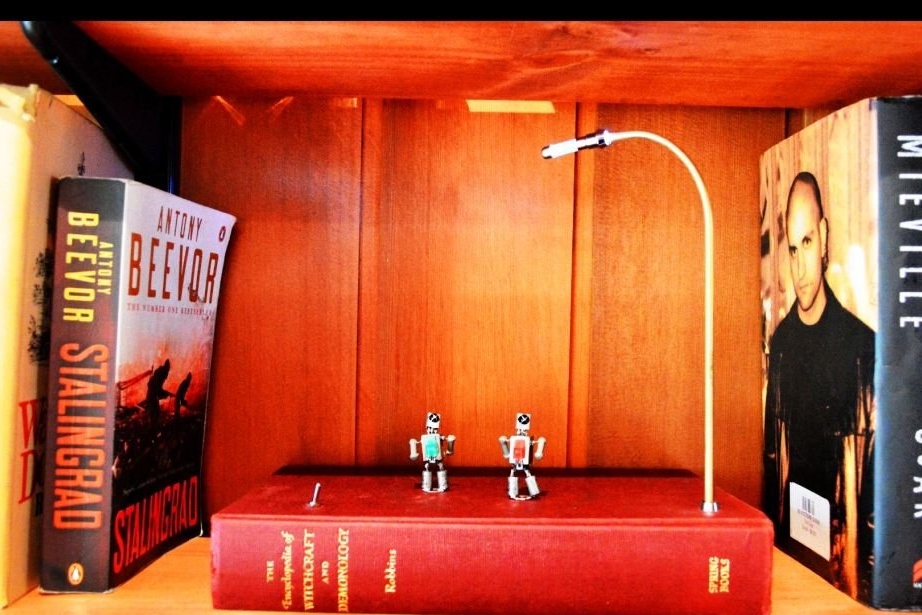
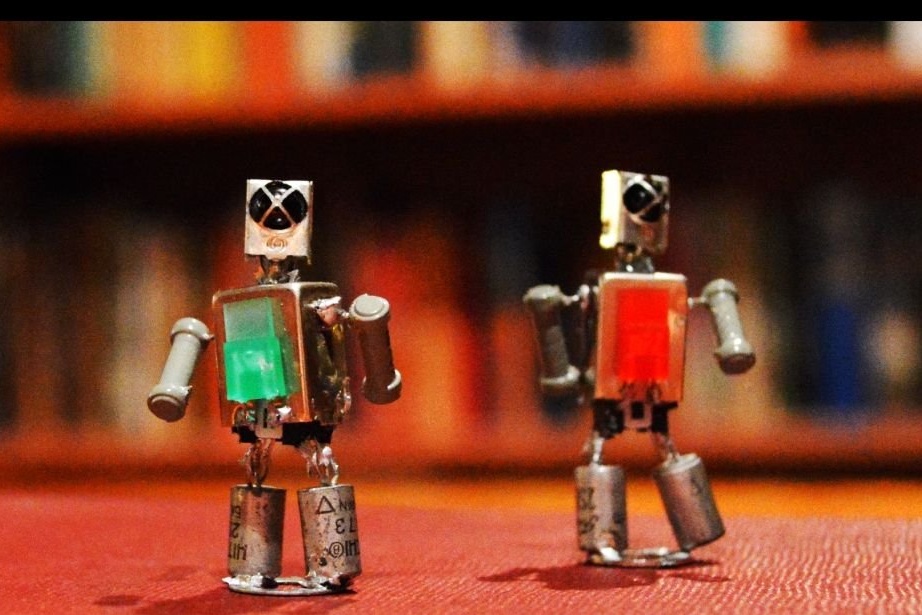
Ang resulta ay dapat na mga robot na umiikot sa libro.
Narito ang ilang mga pangunahing punto na dapat tandaan kung magpasya kang kumuha sa proyektong ito:
1. Siguraduhing kunin ang payat na manipis. Maaari kang mag-eksperimento sa mga magnet upang malaman kung aling mga tagapaghugas ng basura ang pinakamahusay. Kinuha ko ang aking mga tagapaghugas ng basura mula sa mga lumang pamamaraan, ngunit maaari kang bumili ng bago kung wala sa kamay.
2. Subukan ang maraming mga pagpipilian para sa kung gaano kalapit ang mga magnet ay dapat na nasa tuktok ng libro. Napansin ko na kung ang mga magnet ay direkta sa ilalim ng takip, ang mga robot ay mas malamang na sumayaw.
3. Hanapin ang tamang libro - ang mas makapal sa pahina, mas mahusay.
Good luck kung mayroon kang mga katanungan at nangangailangan ng aking tulong - matutuwa akong sagutin ang mga komento.