Pagbati sa lahat ng mga mambabasa ng site. Ginagawa ko ang pagkakataong ito upang hilingin sa lahat ng Maligayang Bagong Taon! "Nais namin sa Iyo Isang Metal Xmas At Isang Taong Bagyong Pambabae." Ngayon ay maaari mong basahin ang mga tagubilin para sa pagmamanupaktura ng isang mini plotter. Ginawa ito mula sa lumang DVD o CD computer drive. Hindi ito ang aking unang tagaplano ng ganitong uri, kaya't kung isusulat ko ang mga tagubilin, isasangguni ko ang aking iba pang mga tagubilin, upang hindi magsulat ng parehong bagay nang dalawang beses. Ang unang plotter ay gumana nang maayos, ginamit ko ito para sa iba't ibang mga layunin. Gumuhit lamang ng isang bagay, at din para sa paggawa ng mga nakalimbag na circuit board. Gamit ang isang permanenteng marker, maaari kang maglagay ng mga track sa board, at pagkatapos ay etch tulad ng dati. Ngunit ang unang modelo ay may maliit na mga bahid ng disenyo. Hindi ko nangangahulugang isang maliit na lugar ng pagguhit o pag-ukit, ngunit ang pangangailangan na mag-mount ng isang bahagi, board o sheet ng papel sa isang maliit na mesa. Madali na gumawa ng isang gumagalaw na talahanayan kaysa sa disenyo na iminumungkahi ko, ngunit posible na magtrabaho kasama ang mga malalaking detalye. Ang laki ng lugar ng nagtatrabaho ay magkapareho, dahil limitado ito sa laki ng mga mekanismo ng drive ng DVD.
Simulan natin ang pagkolekta ng mga kinakailangan:
- CD-ROM, DVD-ROM o katulad na mga mekanismo ng 4 na mga PC.
- Arduino Uno
- Arduino CNC Shield v3
- Mga driver para sa a4988 motor na stepper at radiator para sa kanila ng 3 mga PC.
- Servo SG90
- Platform unibersal na Tamiya 70098
- Pagbubukod mula sa DVD-ROM
- Ang power supply para sa 5V, 3A
- Homutiki
- pagkonekta ng mga wire
- Konektor ng 2.54 mm Dupont
- Bulgarian, electric jigsaw, drill
- Soldering iron, panghinang, rosin
- Manipis na nababanat
- Mga drills para sa metal o kahoy 2, 3, 4, 5 mm
- Screw 3x20 mm o 4 mm x20 mm
- Marker, pinakamahusay na manipis
- Mga mani, grovers at tagapaghugas ng 4 mm
- Mainit na pandikit
- Wood screws 2.5 x 25 mm, 2.5 x 10 mm
Hakbang 1 I-disassemble ang disk reader.
Una sa lahat, kailangan nating hanapin at i-disassemble ang 4 na DVD drive. Malamang, isang CD-ROM ang gagawin. Ang pangunahing bagay ay hindi madapa sa mga tulad nito:
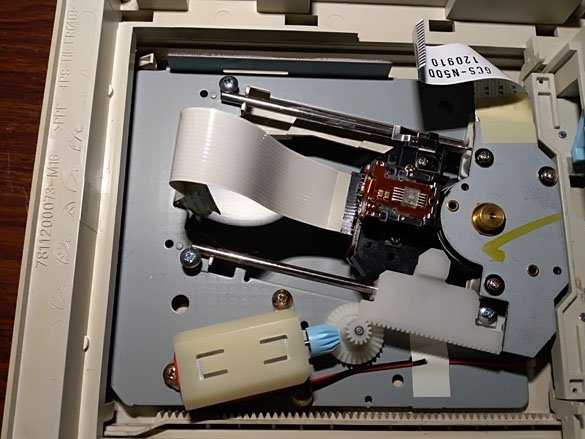
Walang mga motor ng stepper dito, at samakatuwid hindi namin magagamit ang mekanismo nito. Mula sa mga ito, posible na kunin lamang ang katawan, ehe, karwahe.
Hindi namin i-disassemble ang naaangkop na DVD drive. Pagkatapos mag-parse, inilalagay namin ang lahat ng mga board sa isang kahon, pagkatapos ay ibigay namin. Mga plastik na bahagi kaagad para sa paglabas, i.e. para sa pag-recycle:

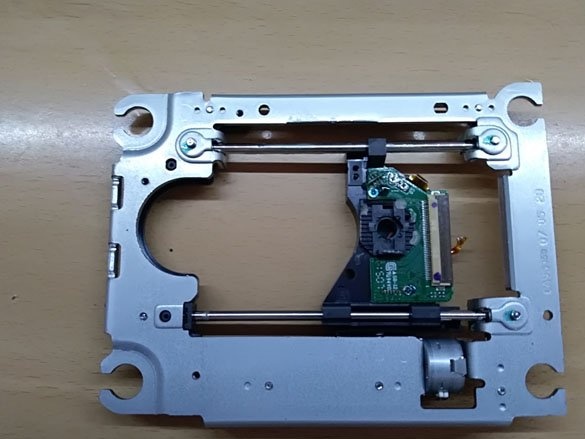
Nakukuha namin ang panloob na mekanismo, at dapat itong magmukhang ganito:

Pinapatay namin ang malaking bilog na motor, hindi namin kailangan ito:
At ilagay ang mga mekanismo sa tabi para sa ngayon.
At mayroon pa rin kaming mga bahagi ng metal:

Kumuha kami ng isa sa mga malalaking takip para sa karagdagang pagproseso, ang natitira na ibibigay namin para sa scrap. Mga patakaran sa pag-recycle!
Hakbang 2 Ginagawa ang kaso.
Ang pagkakaiba sa pagitan ng una at pangalawang bersyon ng mga plotter ay sa pagtatayo ng axis ng Y. Para sa base, kunin ang tuktok na takip mula sa DVD-ROM. Una, paikliin ito. Kumuha kami ng dalawang magkaparehong panloob na mekanismo, sila ang magiging responsable para sa paggalaw ng axis ng Y. Sinusukat namin ang kanilang haba, naiiba sila, maaari silang magkakaiba sa pamamagitan ng ilang milimetro. Ngunit karaniwang ito ay 125 mm. Pinutol namin ang aming takip mula sa harap upang,, simula sa likuran ng liko sa harap, 125 mm ang natitira. At putulin ang mga nakausli na sulok na inilaan para sa pag-fasten ng takip. Sa gitna ng base, ang isang parisukat na 110 x 90 mm ay dapat i-cut:


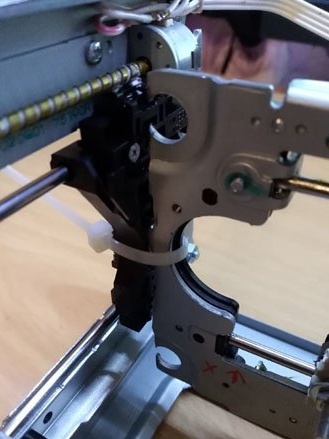
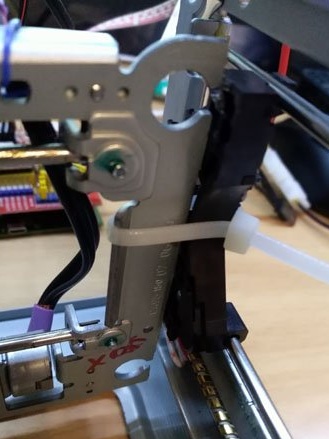
Ngayon inilalapat namin ang nakabinbing magkaparehong mekanismo sa mga dingding sa gilid, mula sa loob ng takip. Ang cutout para sa malaking bilog na motor ay dapat na nasa harap, at ang mga lente sa mga karwahe ay dapat na idirekta palabas. Sa gayon, mayroon kang isang motor na stepper ng mekanismo ay nasa ilalim, at ang pangalawa sa tuktok. Ginagawa namin ito upang mula sa ilalim ng takip hanggang sa tuktok ng mga mekanismo ito ay 120 mm, at markahan ang mga lugar ng pag-attach sa mga pabalat. Sa mga minarkahang lugar na pinapalawak namin ang mga butas na 4 mm, dapat kang makakuha ng dalawang puntos ng pagkakabit sa mekanismo. Isa sa harap:

At ang isa sa likod:

Sa sandaling inilalapat namin ang mga mekanismo, markahan sa batayan ng lugar kung saan ang makina o iba pang mga bahagi ay nakagambala sa akma ng buong mekanismo sa base, at pinutol ito. Pagkatapos nito, inaayos namin ang mga mekanismo sa base sa tulong ng 4 x 12 mm bolts na may 4 mm nuts:


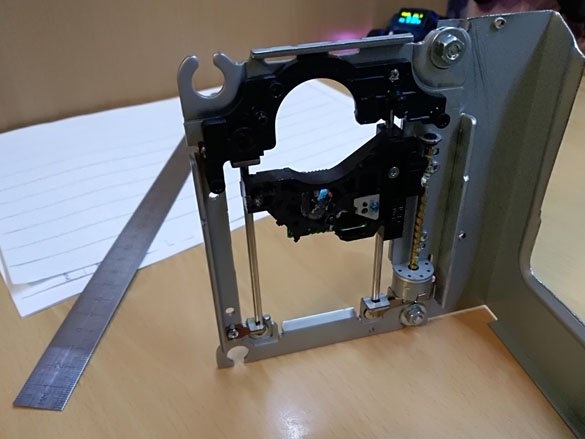
Upang matiyak na ang lahat ng mga mekanismo ay antas, maginhawa upang mai-mount ang mga ito sa pamamagitan ng paglalagay ng base patagilid. Huwag kalimutan na suriin ang distansya mula sa ilalim ng base hanggang sa tuktok ng mga mekanismo:
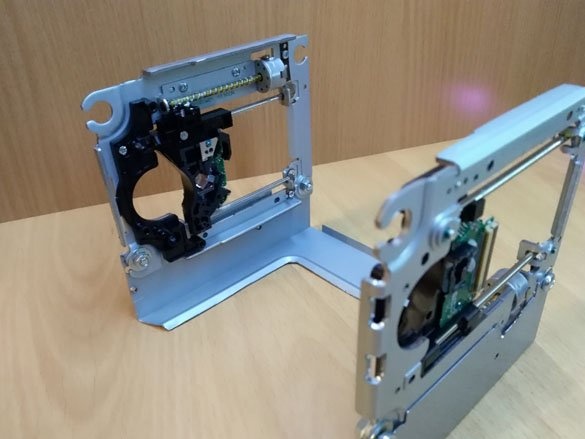
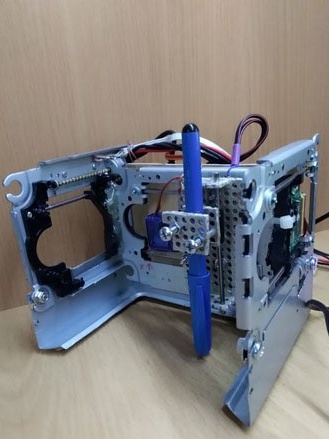
Ang pag-Attach sa parehong mekanismo, nakuha namin ang natipon na axis Y:
Ngayon ay maginhawa upang makagambala mula sa metal at kumuha ng isang paghihinang bakal. Kinakailangan na alisin ang mga motor ng stepper mula sa mga mekanismo at mga wire ng panghinang sa kanila, lahat ng apat, mga 15 cm ang haba:

Mas kawili-wili, ipinangako ko! Kinukuha namin ang pangatlong mekanismo, ito ang hinaharap na X axis. Sinusubukan naming ilagay ito sa pagitan ng mga karwahe ng axis ng Y. Malamang na hindi ito magkasya nang kaunti sa lapad. Sinusukat namin ang laki na kailangan namin, iyon ay, ang distansya sa pagitan ng mga karwahe ng Y-axis.Malamang malamang na ito ay 120 mm. At putulin ang mekanismo ng X axis para sa laki na kailangan namin mula sa gilid ng engine na binaril namin. Para sa mga ito, sa palagay ko, mas maginhawang kumuha ng isang gilingan, dahil ang metal sa mekanismo ay makapal at hindi maaaring dalhin ng mga simpleng gunting para sa metal:

Sa karwahe ng mekanismo na inihanda namin, kola ang isang piraso ng circuit board o universal platform na Tamiya 70098. Ito ay kinakailangan para sa paglakip ng gumaganang tool. Ilagay ang X axis sa lugar nito. Gamit ang mga clamp, inaayos namin ang axis sa lugar nito, ngunit hindi hanggang ngayon:
Dapat itong magmukhang ganito:
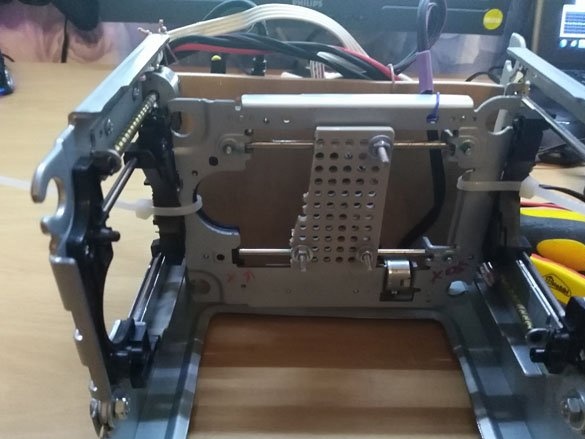
Ngayon kunin ang namumuno. Inilalagay namin ang aming plotter sa isang patag na mesa, na may hindi bababa sa isang panig na dingding. Kaya't ang taga-plot ay nanatili laban sa dingding at nakatayo sa mesa. Ang paglipat ng X axis ay bahagyang ginagawang 110 mm mula sa parehong mga dulo ng talahanayan, iyon ay, pahalang ito sa ibabaw kung saan ito nakatayo. At gumawa kami ng isang kahit na distansya mula sa gilid na pader hanggang sa mga gilid ng X axis upang ang axis ay matatagpuan nang eksakto na may kaugnayan sa axis ng Y. Ang pagkakaroon ng nakamit ang mga sukat na kailangan namin, masikip namin ang mga clamp. Kumuha kami ng isang mainit na baril na pandikit at nakadikit ang axis ng X sa posisyon na ito sa mga karwahe ng axis ng Y. Pagkatapos ng paghihintay sa cool na pandikit, ang mga clamp ay maaaring maputol, sila ay mababaw:

Sa ilalim ng base, ang mga silicone o goma na paa ay dapat na nakadikit upang ang plotter ay sumulyap sa:

Hakbang 3 Tool sa Trabaho.
Para sa plotter, gagamitin namin ang isang tool na gumagana sa lutong bahay. Gumuhit kami ng isang marker, mas mabuti kasing payat hangga't maaari. Posible upang gumuhit ng isang panulat. Ang paggawa ng tulad ng isang may-hawak at mekanismo ay ganap na inilarawan nang detalyado sa "Hakbang 2. Produksyon ng may-ari ng isang object ng pagsulat." aking mga tagubilinDVD mini plotter»
Plotter - hindi ito ang limitasyon sa batayang ito. Maaari mong mai-install ang laser module gamit ang mga tagubilin "Laser engraver mula sa bersyon ng DVD 2.0»
Ang mga pangunahing kaalaman ay ganap na magkatugma.
Hakbang 4 Elektrisyan.
Para sa mga nagsisimula, gupitin ang isang parihaba na 130 x 110 mm mula sa chipboard na 3-6 mm na makapal. Ito ang magiging batayan para sa mga elektrisyan.Maaari kang gumamit ng plastic o textolite, kung kumuha ka ng metal, siguraduhin na walang maikling circuit. Mount Arduino Uno sa aming rektanggulo:

Sa tuktok ng Arduino inilalagay namin ang CNC Shield v 3. Ngayon kailangan nating mag-install ng microstep 1 \ 16 sa mga driver ng engine. Mag-install kami ng mga driver ng A4988, samakatuwid ay aayusin namin ang mga setting para sa kanila, kung mayroon kang iba pang mga setting, ayon sa pagkakabanggit, ay magkakaiba. Para sa Y axis, gumagamit kami ng dalawang stepper motor, kaya inilalagay namin ang dalawang mga jumpers sa tapat ng pagtatalaga ng axis ng Y, kaya madoble namin ang signal ng Y axis sa A axis. Kung saan eksaktong eksaktong ipinapahiwatig ang mga jumpers na ito sa larawan sa ibaba. Kailangan din nating mag-install ng mga jumper sa MS, MS1, at MS2 axes X, Y, at A. Ang mga jumpers na MS0, MS1, at MS2 ay matatagpuan sa pagitan ng mga pad ng pag-install ng driver:
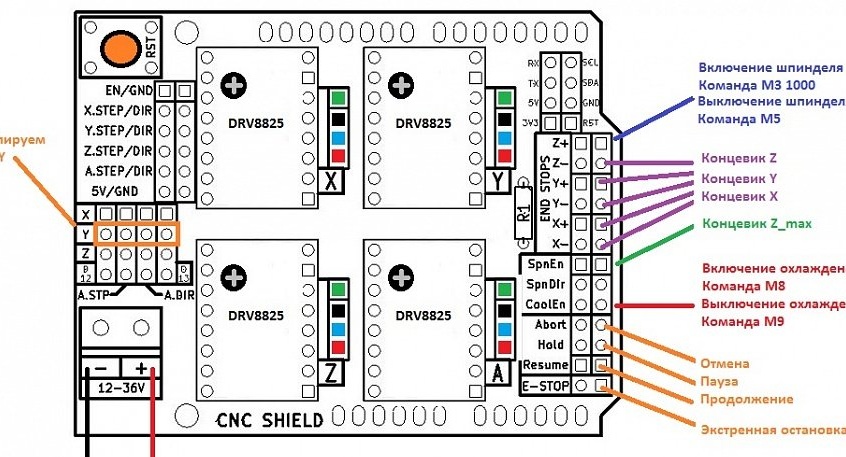
Ang CNC Sheld ay may isang operating boltahe ng operating ng 12 - 36 V, ngunit mayroon kaming mga motor ng stepper na tumatakbo mula sa 5 V, kaya gagamitin din namin ang CNC Sheld mula sa isang 5 boltahe na suplay ng kuryente. Ang suplay ng kuryente ay dapat na kinuha ng lubos na makapangyarihan, hindi bababa sa 3 A. Ang supply ng kuryente ay humigit-kumulang sa sumusunod:

Ang gumaganang tool, sa aming kaso, ay ang servo SG90, ikinonekta namin ang mga sumusunod. Ang isang positibong kawad, pula, kumonekta kami sa +5 na nagmula sa power supply, hindi mo mai-kapangyarihan ang servo mula sa mga +5 na contact na matatagpuan sa CNC Sheld (nagmula sila sa kasalukuyang regulator sa Arduino UNO, at hindi dinisenyo para sa mataas na pagkarga), GND (itim na kawad) mula sa SG90 kumonekta sa GND CNC Sheld, at ang signal wire (dilaw) ay kumonekta sa + Z pin sa CNC Sheld.
Ngayon ay kailangan mong itakda ang operating kasalukuyang para sa mga motor ng stepper. Ang prosesong ito ay inilarawan nang detalyado sa "Laser engraver mula sa bersyon ng DVD 2.0»
Nabasa namin ang ika-apat na hakbang ng pagtuturo "Hakbang 4 Ang pagtatakda ng limitasyon ng motor sa kasalukuyan." at gawin ang lahat ayon sa tagubiling iyon. Ngunit dahil mayroon kaming isang tagaplano, at ang marker ay lilikha ng pagtutol sa paggalaw ng mga axes, tataas namin ang kasalukuyang kaunti upang walang mga nawawalang mga hakbang:
Vref = Imax * 8 * (RS)
Imax - kasalukuyang ng motor ng stepper
Ang RS ay ang paglaban ng risistor.
Sa kaso ng isang taga-plot:
RS = 0.100.
Imax = 0.55
Vref = 0.55 * 8 * 0.100 = 0.44 V.
Bilang isang resulta, sa pagitan ng variable na risistor ng driver ng stepper motor at GND dapat mayroong boltahe na 0.44 V.
Hakbang 5 Software.
Una sa lahat, kailangan mong i-download ang Arduino IDE, pinakamahusay na gawin ito opisyal na site
Gagamitin namin ang GRBL firmware. Upang patakbuhin ang taga-plot ng isang servo drive, espesyal na binago ito. I-download ito
Alisin ang nai-download na archive kasama ang landas ng pag-install ng Arduino IDE, sa folder na "mga aklatan". Binubuksan namin ang kapaligiran sa programming at sumama sa landas na "file" - "mga halimbawa" - "grbl-servo-master". I-download ang sketch sa Arduino. Ang plotter ay kinokontrol sa pamamagitan ng serial port.
Upang magsimula, nananatili itong i-download ang programa para sa mga transcoding ng mga larawan sa gcode, naintindihan sa taga-plot. Ang pinaka komportable, sa aking opinyon, LASERGRBL. I-download ito
Kung gayon ang lahat ay simple, simulan ang LASERGRBL, ikonekta ang plotter, kumonekta dito sa programa at subukang ipadala ang $$, dapat nating makuha ang mga parameter bilang tugon.
Ang plotter ay gumagana nang maayos at may isang sapat na malaking resolusyon, ngunit ang kapal ng marker ay malaki. Samakatuwid, ang mga maliliit na label ay maaaring hindi gumana.
Ngunit ang mga ordinaryong guhit ay lumabas nang maayos