

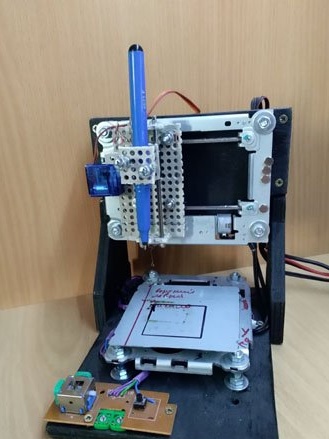
Malugod na batiin kang muli. Kaya, ngayon gagawa kami ng isang tagaplano. Ang isang maliit mula sa isang computer DVD o CD. Ang plotter na ito ay isang pagbabago ng aking pag-ukit ng laser machine, maliit din, din mula sa computer DVD o CD. Samakatuwid, upang hindi sumulat ng parehong bagay, sasangguni ko sa aking iba pa gawang bahay. Kung mayroon ka nang makinang pag-ukit ng laser, na ginawa ayon sa aking mga tagubilin, ang iyong trabaho ay mababawasan sa paggawa ng isang gumaganang tool - isang may hawak ng pen o marker. Ang may hawak na ito ay ilalagay sa lugar ng laser. Ang mga hindi gumawa ng naturang mga makina ay kailangang magbukas ng dalawang tagubilin.
Pagpapakita ng video:
Gagamitin namin:
- DVD-ROM o CD-ROM (kabuuang 4 ay kinakailangan, kung mayroong isang makina - 2)
- Plywood, chipboard, OSB 10 mm makapal (6 mm playwud o chipboard ay angkop din)
- Arduino I-uno (o anumang mga katugmang board. Nano, Micro, Esplora - hindi gagana)
- Arduino CNC Shield v3
- Servo SG90
- Platform unibersal na Tamiya 70098
- Mga driver ng motor ng stepper A4988 na may radiator 2 mga PC.
- Ang power supply para sa 5V, 3A
- pagkonekta ng mga wire
- Konektor ng 2.54 mm Dupont
- Eletrolobzik, drill
- Manipis na nababanat
- Mga drills para sa metal o kahoy 2, 3, 4, 5 mm
- Screw 3 x 20 mm o 4 x 20 mm
- Marker, pinakamahusay na manipis
- Mga mani, grovers at tagapaghugas ng 4 mm
- Mainit na pandikit
- Wood screws 2.5 x 25 mm, 2.5 x 10 mm
- Soldering iron, panghinang, rosin
Hakbang 1 Assembly ng batayan para sa taga-plot.
Tulad ng sinabi ko, kailangan mong lumingon sa isa pa aking mga tagubilin.
Sundin ang mga hakbang 1 at 2. I-disassemble lang ito ay kinakailangan 4 DVD o CD drive. Dalawang drive ang i-disassemble ito ang magiging axis X at Y.
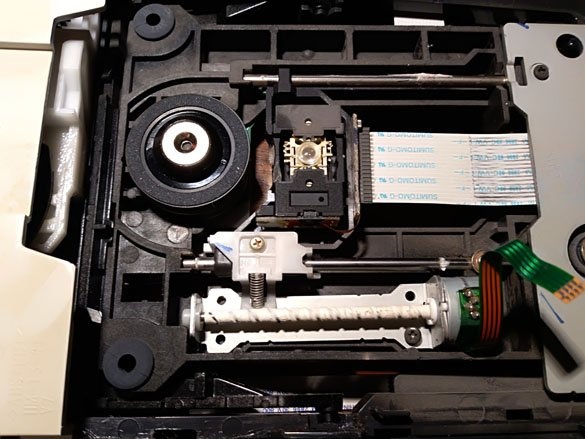
Kapag nag-i-drive ang CD drive, maaari mong makita ang isang hindi kasiya-siya sorpresa. Walang magiging motor ng stepper sa loob. Mukha silang ganito:
Tulad ng nakikita mo sa larawan, sa mga ito ay may regular na DC motor. Ang mga ito ay maaaring magamit upang makagawa ng isang may hawak ng marker o panulat.
Sa parehong pagtuturo, ang pangatlong hakbang ay ang paghahanda ng power supply, maaari mong gamitin ang hakbang na iyon. Ngunit pag-uusapan natin ang tungkol sa power supply mamaya.
Ang engraver manual manu-manong bersyon 1 ay may ika-apat na hakbang, "Hakbang 4 Joystick para sa manu-manong operasyon." - hindi mo kailangang gawin ito. Kinakailangan ang joystick sa unang bersyon ng firmware. Sa pangalawa at lahat ng kasunod, ang mga control command ay ipinadala sa pamamagitan ng serial port.
Hakbang 2 Paggawa ng isang may hawak ng pagsulat.
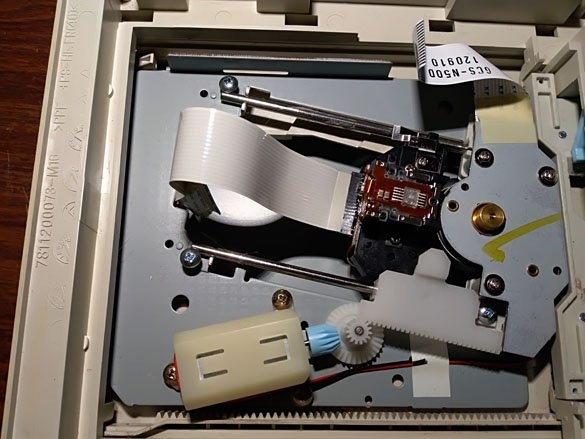
Ang pagkakaroon ng disassembled ng ilang mga DVD-driver, binuksan namin ang dalawa pa. Sa dalawang drive na ito, kailangan lang namin ng dalawang axles at dalawang bearings.
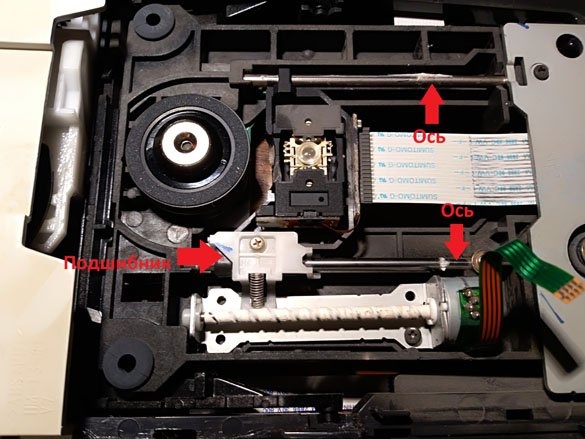
Ngunit ang dalawang drive ay kinakailangan, dahil ang frame na may dalawang mga gulong sa isang biyahe ay isa lamang, at kailangan nating dalawa.Ang mga bearings ay madalas na integral sa isang paglipat ng karwahe. Samakatuwid, ang karamihan sa karwahe ay dapat na maputol o mag-alis, ang pangunahing bagay ay hindi makapinsala sa pagdadala. Ginagawa namin ang mga sangkap na kailangan namin:

Kinukuha namin ang platform mula sa set na "Platform universal Tamiya 70098". Siyempre, ang platform na ito ay ginagamit upang makabuo ng isang sinusubaybayan na modelo, ngunit nanatili akong tulala mula nang gumamit ako ng iba pang mga materyales. Ang platform ay mahusay na angkop para sa paggawa ng iba't ibang mga bahagi, mayroon itong mga butas, at madaling i-cut.
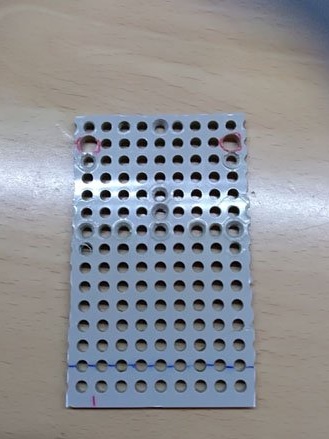
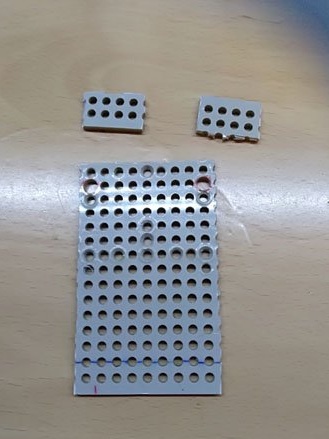
Maaari mong palitan ang platform na ito sa isa pang materyal, halimbawa, makapal na playwud 4 mm. Tanging sa kasong ito kakailanganin na gumawa ng mga butas sa playwud para sa pag-mount ng mga ehe, pag-mount sa machine at clamping plate. Anumang materyal na iyong kinukuha, pinutol namin ang mga parihaba mula dito: 80 x 48 mm ang batayan, dalawang 24 x 15 mm ang mga ehe, 23 x 23 mm ang clip para sa pen (marker), 23 x 23 mm na may protrusion sa isang tabi. sa pamamagitan ng 10 mm.
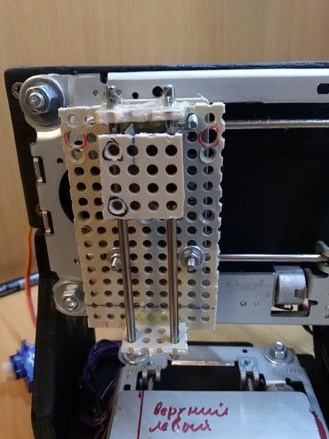
Pagkuha ng isang mainit na baril na pandikit, tipunin namin ang aming mekanismo tulad ng sumusunod:
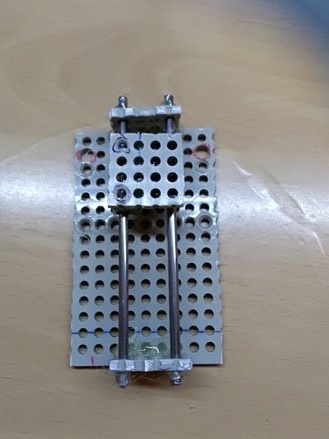
Hayaan akong ipaliwanag: sa base sa itaas at sa ibaba, patayo sa base, kola ang mga parihaba 24 x 15 mm. Pagkatapos ay ipinasok namin ang axis gamit ang mga bearings, ang axis ay naayos din sa mga gilid. Nagdikit kami ng isang 23 x 23 mm na parihaba na may protrusion sa mga bearings (wala akong larawan ng protrusion, nakalimutan ko ito kapag pinutol ko ito, pipikit ko ang protrusion sa ibang pagkakataon).
Bago i-install, dapat kang magkaroon ng sumusunod na pangkabit sa makina:
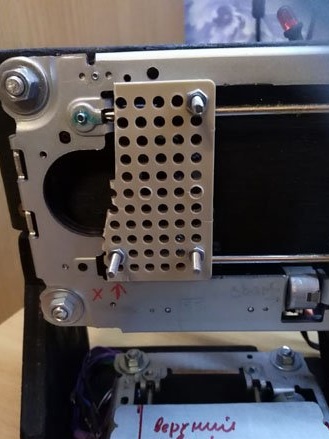
Paano gawin itong inilarawan nang detalyado sa mga tagubilin na "Laser engraver mula sa lumang DVD-Rom."
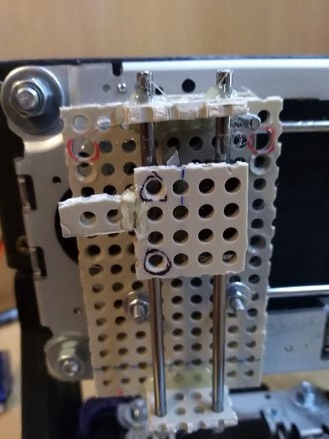
Inilalagay namin ang aming mekanismo sa makina, ayusin ang paggamit ng mga mani:
Dahil nakalimutan ko ang tungkol sa protrusion, inilalagay namin ito sa rektanggulo na nakadikit sa mga goma:
Kinukuha namin ang drive ng servo at nakadikit ito sa base, sa kaliwang bahagi, humigit-kumulang sa gitna. Bago maiayos ang servo, tiyaking nakatakda ito sa 90 degree.
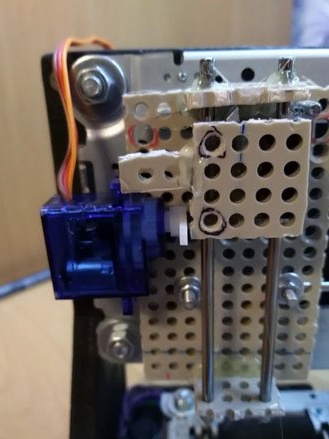
At ngayon kumuha kami ng isang maliit na piraso ng gum, i-thread ito sa panlabas na butas ng servo lever, pagkatapos ay i-thread ito sa butas ng protrusion o ihagis lamang ito sa protrusion:
Ang instrumento ng pagsulat ay itataas ng pingga mula sa servo, habang ang servo ay nasa 90 degree na posisyon. Kapag bumaba ang pingga (ang posisyon ng servo ay magiging 180 degree), ang panulat o marker ay bababa pagkatapos ng pingga, at bahagyang pinindot dahil sa nababanat na tensyon.
Sino ang hindi makapaghintay upang suriin ang taga-plot sa trabaho, maaari lamang itong ilagay ang isang marker sa mainit na matunaw na malagkit:
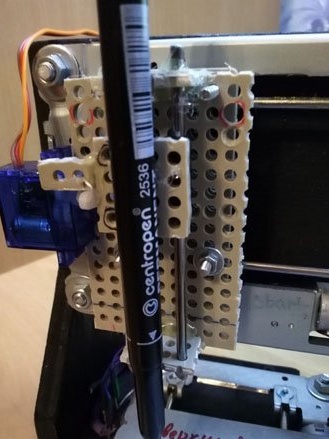
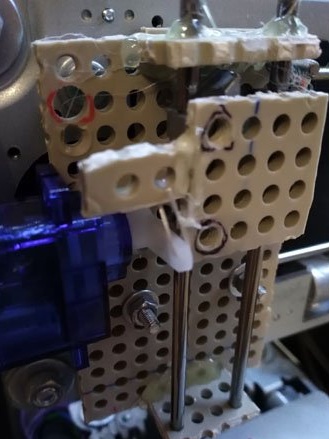
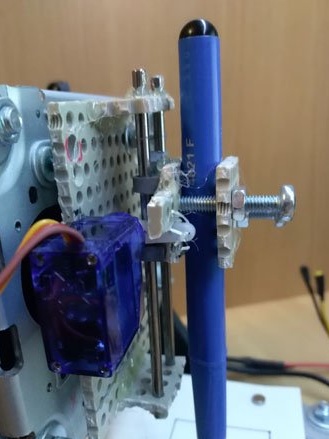
Sino pa ang may pasensya - kumuha kami ng mga bolts, nuts, isang clamping parihaba at tipunin ang disenyo na ito:
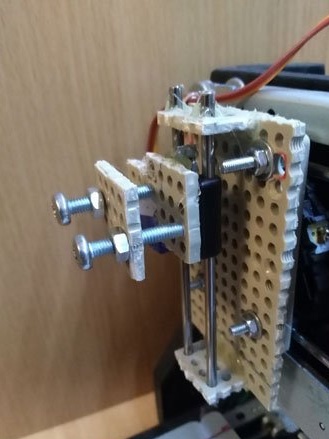
Ipinasok namin ang marker sa pagitan ng mga parihaba at salansan gamit ang mga mani (maaari mong gamitin ang iyong mga kamay, ito ay magiging sapat upang hawakan ang marker):
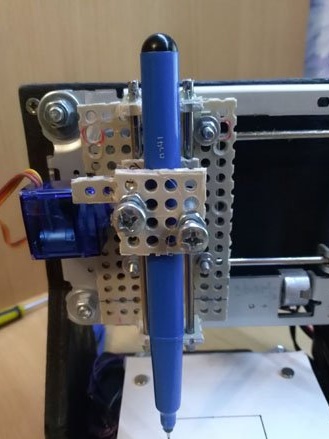
Upang gawing mas mahusay na makita ang buong istraktura, ang isang pares ng higit pang mga larawan mula sa iba't ibang panig:

Iyon lang ang may mga mekanika. Lumiko kami sa mga electrics at software.
Hakbang 3 Elektriko.
Gumagamit kami ng mga electrics mula sa pangalawang bersyon ng engraver ng laser - "Laser engraver mula sa bersyon ng DVD 2.0».
Isinasagawa namin ang halos lahat sa ikatlong hakbang ng mga tagubilin sa itaas. Hindi namin kailangan ang transistor mula sa tagubiling iyon, kinakailangan upang i-on ang laser, gumagana ang servo drive nang walang transistor, mayroon itong sariling magsusupil. Ang isang pagsubok sa LED ay magiging kalabisan.
Sa ika-apat na hakbang ng parehong tagubilin, "Hakbang 4 Ang pagtatakda ng limitasyong motor ngayon.", Inilarawan ang proseso ng pagtatakda ng kasalukuyang motor ng stepper. Kapag nagtatrabaho ang laser, walang karagdagang pagtutol para sa paggalaw nito. Sa plotter, ang instrumento ng pagsulat ay makikipag-ugnay sa papel, na lilikha ng pagtutol sa paggalaw dahil sa mga tinik. Samakatuwid, ang kasalukuyang lakas ay mas mahusay na bahagyang taasan. Ginagawa namin ang lahat ayon sa tagubiling iyon, binabago lamang namin ang mga parameter ng pagsukat:
Vref = Imax * 8 * (RS)
Imax - kasalukuyang ng motor ng stepper
Ang RS ay ang paglaban ng risistor.
Sa kaso ng isang taga-plot:
RS = 0.100.
Imax = 0.55
Vref = 0.55 * 8 * 0.100 = 0.44 V.
Bilang isang resulta, sa pagitan ng variable na risistor ng driver ng stepper motor at GND dapat mayroong boltahe na 0.44 V.
Para sa kapangyarihan kailangan namin ng isang 5 V supply ng kuryente.Pinakamainam na kumuha ng 3 A block, mas mabuti na may isang margin. Ang input boltahe mula 12 V hanggang 36 V ay nakasulat sa CNC Shield, ngunit dahil ang aming mga motor ng stepper ay idinisenyo para sa 5 V, pipilitin namin ang CNC Shield at, nang naaayon, ang mga driver ay 5 V. Ang circuit na ito ay personal na nasubok sa akin at paulit-ulit, gumagana nang maayos ang lahat. Ang power supply ay tulad nito:

Gamit ang mga sumusunod na tampok:

Simula mula sa GRBL bersyon 0.9, ang mga pin ng koneksyon na "Z-limit +" at "paganahin ang spindle" ay pinalitan. Samakatuwid, ang signal wire mula sa servo ay konektado sa "Z-limit +". Dagdag pa, mula sa servo hanggang sa +5 V (ang kapangyarihan ay dapat na dadalhin nang direkta mula sa suplay ng kuryente, at hindi mula sa +5 V, na matatagpuan sa Arduino), GND hanggang GND, ayon sa pagkakabanggit.
Maaari ka ring gumamit ng isang power supply ng computer. Paano gawin ito ay inilarawan sa "Hakbang 3 Paghahanda ng Power Supply." aking mga tagubilinLaser engraver mula sa lumang DVD-Rom»
Hakbang 4 Firmware at kontrol ng programa.
Upang magsimula, i-download ang Arduino IDE, tulad ng lagi opisyal na site
Upang makontrol ang plotter, gagamitin namin ang GRBL, binago upang makontrol ang servo drive. Pumunta sa sumusunod na link at i-download ang archive buo
Isusulat namin ang hindi naka-unpack na archive sa folder na "mga aklatan", na madaling gawin sa folder gamit ang Arduino IDE na naka-install. Sinimulan namin ang Arduino IDE, pumunta sa "file" - "mga halimbawa" - "grbl-servo-master". Mag-click sa "pag-download", maghintay para sa sketch na matapos ang pag-load. Upang makontrol ang taga-plot, gagamitin namin ang programang LASERGRBL. Pag-download at i-install ito
Ang interface ng programa ay madaling maunawaan, ang lahat ay simple doon.
