

Upang makagawa ng ganoong robot gamit ang iyong sariling mga kamay ay hindi magiging mahirap at maging kawili-wili. Ang resulta ay isang napaka-kagiliw-giliw na aparato na kumikilos tulad ng isang buhay na nilalang. Ang lahat ng ito salamat sa dalawang maliit na motorsiklo, sila ang humimok sa robot. Sa pamamagitan ng pagbabago ng anggulo ng pag-atake ng mga shaft ng motor, maaari mong gawing mas mabilis o mas mabagal ang robot. Maaari ka ring mag-eksperimento sa iba't ibang mga tip na maaaring magsuot sa baras ng motor.
Mga materyales at tool:
- dalawang maliit na motor (3 Volts, ay matatagpuan sa mga laruan ng mga bata);
- may hawak para sa mga baterya (magagawa mo ito sa iyong sarili o hilahin ito mula sa lumang remote control, flashlight, atbp);
- dalawang switch ng uri ng SPDT (maaari silang makuha mula sa isang lumang mouse sa computer);
- dalawang maliit at isang malaking clip ng papel;
- isang maliit na gulong mula sa laruan;
- manipis na mga kable

Proseso ng paggawa
Unang hakbang. Ang mga wiring wiring
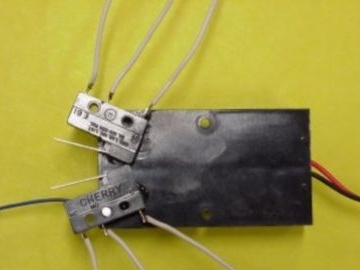
Una sa lahat, kailangan mong ihanda ang mga wires at panghinang sa lahat ng mga elektronikong sangkap, upang sa paglaon ay maginhawa upang kumonekta ang mga node. Ang mga wire ay dapat na i-cut sa isang haba ng 6 cm at tinanggal mula sa kanilang mga dulo sa pamamagitan ng tungkol sa 1 cm. Ngayon kailangan mong maghinang ng dalawang wires sa mga motor at switch. Gayundin, huwag kalimutang ibebenta ang dalawang wires sa mga contact ng may-hawak ng baterya. Ang iba pang mga dulo ng mga wire ay mas mainam na naka-tin.

Hakbang Dalawang Mga setting ng switch
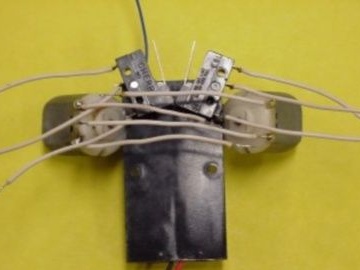
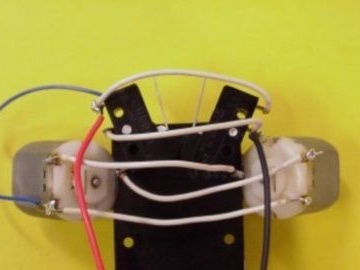
Upang itakda ang mga switch, dapat i-turn up ang baterya. Ngayon ay kailangan mong i-glue ang mga switch na may pandikit sa may-hawak ng baterya. Bilang isang resulta, ang titik V ay dapat mabuo.
Hakbang Tatlong Pag-install ng engine
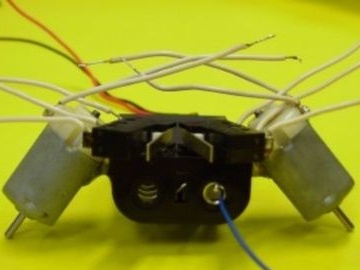
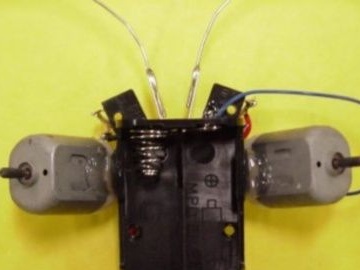
Ang mga motor ay dapat na nakakabit sa may-hawak ng baterya sa isang anggulo, tulad ng ipinahiwatig sa larawan. Ang mga anggulo sa magkabilang panig ay dapat na pareho, kung hindi man ang robot hindi gagana nang maayos. Ang mga motor shaft ay dapat magpahinga sa kalsada. Ang mga Motors ay maaaring mai-mount gamit ang pandikit.

Hakbang Apat Pag-install ng stabilizer wheel
Ang stabilizer ay kinakailangan upang gawang bahay tumayo ng patag sa kalsada. Upang makagawa ng isang gulong, maaari kang gumamit ng isang roller mula sa isang recorder ng tape o isang gulong mula sa laruan ng isang bata. Tulad ng para sa "plug", ito ay gawa sa isang mahabang papel na clip o string.Sa konklusyon, ang stabilizer ay dumidikit nang pantay-pantay sa may-ari ng baterya.

Hakbang Limang Koneksyon ng mga kable
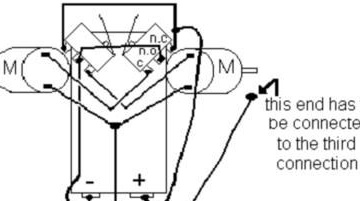
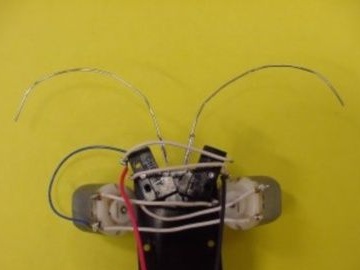
Upang gumana nang tama ang robot, ang lahat ng mga wire ay dapat na konektado nang malinaw ayon sa pamamaraan. Ang circuit ay makikita sa larawan.

Hakbang Anim Ang paggawa ng isang bigote para sa bug
Ang bigote ay magsisilbing isang gulong para sa salaginto, sa sandaling nakakatugon ang isang balakid, ang bigote ay i-on ang mga switch, at pagkatapos ay iikot ng motor ang robot sa ibang direksyon. Kapag ang switch ay isinaaktibo, ang isa sa mga motor ay naka-off at isang uri ng pagkakaiba ay na-trigger. Kung ang parehong switch ay isinaaktibo, ang robot ay humihinto nang ganap. Ang bigote ay gawa sa maliit na mga clip ng papel, dapat na maingat na nakadikit sa mga pindutan ng mga switch.

Ikapitong hakbang. Pangwakas na pag-rebisyon at pagsubok ng robot
Sa pangwakas na yugto, ang mga tip ng goma ay dapat na mai-install sa mga shaft ng motor, kinakailangan ang mga ito para sa mas mahusay na pagkakahawak. Maaari silang gawin mula sa cambric.
Iyon lang, handa na ang robot. Kailangan mong patakbuhin ito sa isang makinis na ibabaw, halimbawa, sa isang mesa o linoleum. Dahil ang mga paws ng salaginto ay napakaliit, hindi ito mai-crawl kasama ang karpet, para dito kinakailangan na dagdagan ang mga tip sa mga shaft ng motor.
Sa hinaharap, ang robot ay maaaring ma-upgrade sa pagpapasya nito. Halimbawa, maaari siyang gumawa ng mga mata ng LED na magaan kapag nakikipag-ugnay sa isang balakid.