
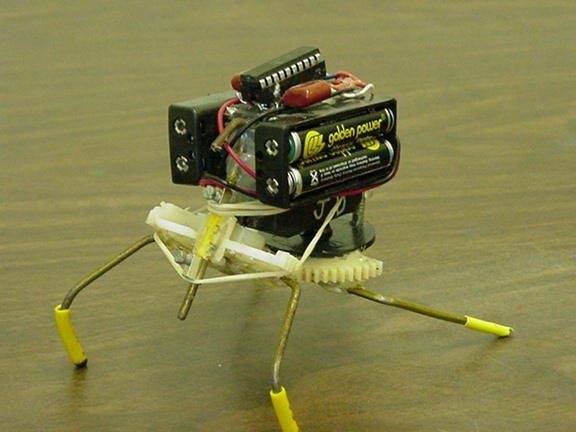
Wala nang mas kawili-wiling kaysa sa isang robot na naglalakad, sapagkat tulad nito ang robot ginagaya ang pinakamahusay na nabubuhay na nilalang na nakatira sa amin sa ating planeta. Upang gumawa ng tulad ng isang robot ay hindi mahirap, ngunit kailangan mong magkaroon ng pagnanais at ilang mga kasanayan sa larangan ng electronics.
Mga materyales at tool:
- isang piraso ng tanso wire;
- dalawang may hawak ng baterya ng daliri;
- dalawang monolitikikong ceramic capacitor na 0.22 mF bawat isa;
- isang 3.3M risistor;
- 74NST240 octal inverter chip para sa walong mga channel (isa);
- 20 pin DIP 74XX240 o 74XX245 (isa);
- servomotor (isa);
- lumipat;
- isang plastik na goma;
- konektor ng kawad.
Proseso ng paggawa
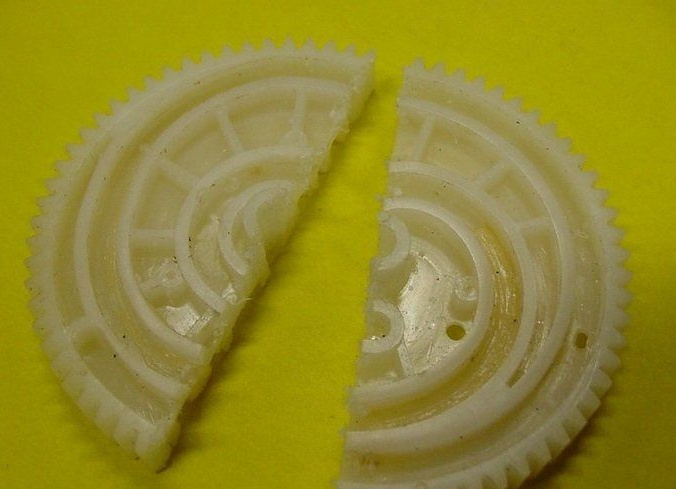
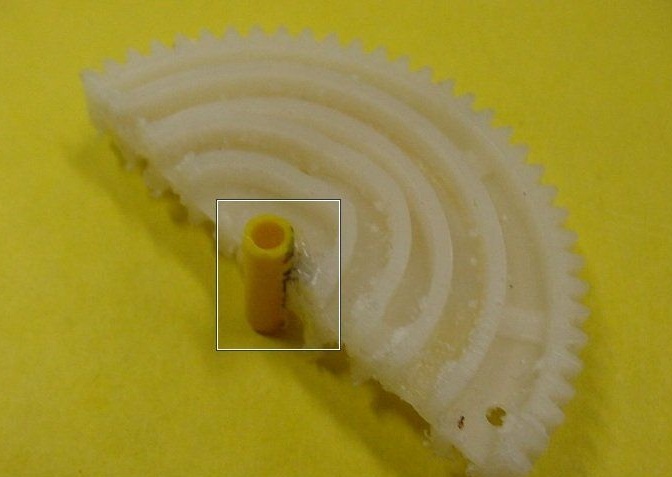
Unang hakbang. Paghahanda ng gear
Kailangan mong kunin ang plastic gear at gupitin ito sa dalawang magkaparehong bahagi. Pagkatapos ay kailangan mong alisin ang sungay at gumamit ng pandikit upang ayusin ito sa isang kalahating bilog.

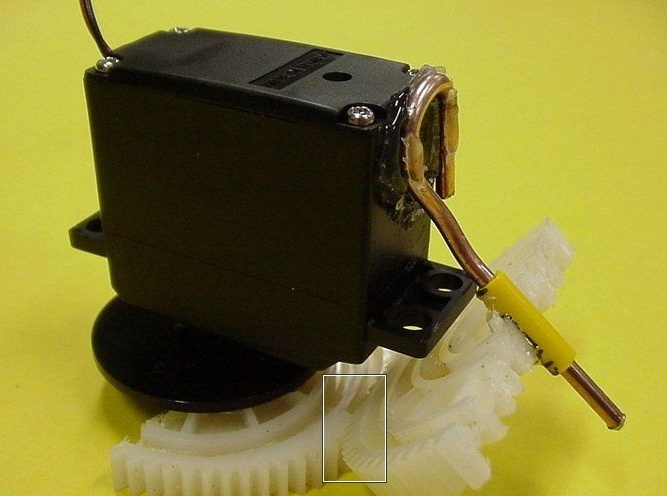
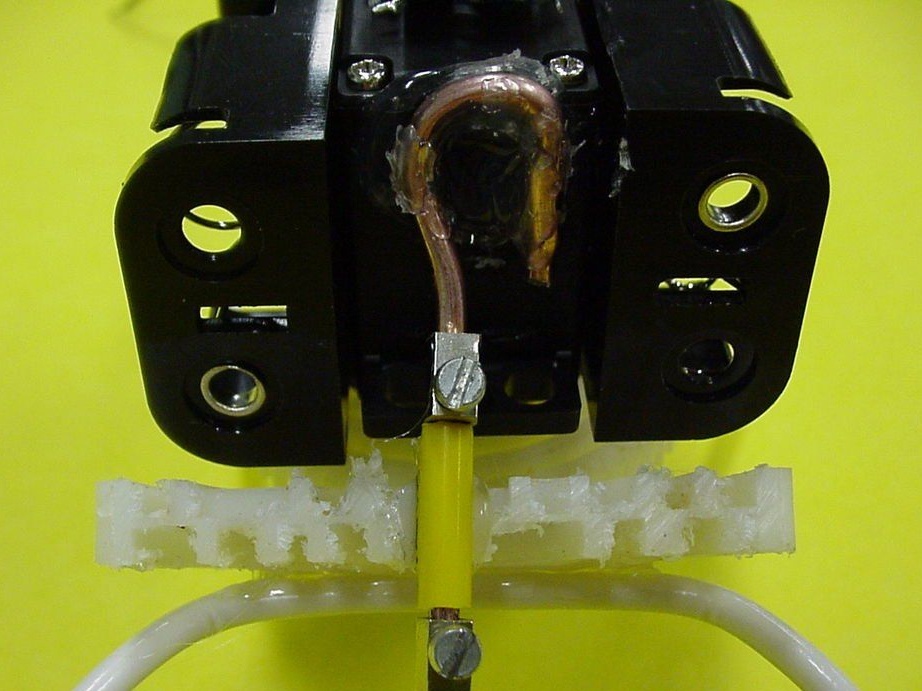
Hakbang Dalawang Pagbabago ng engine
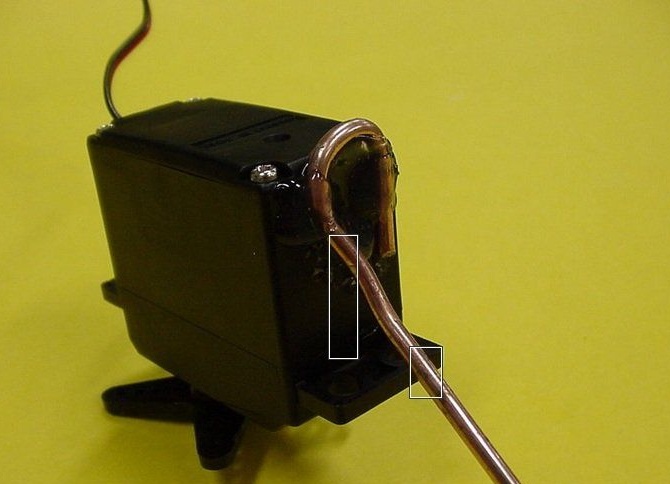
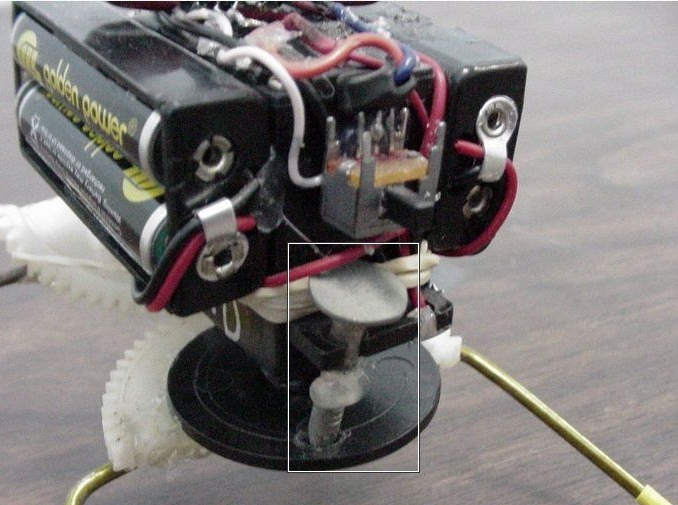
Ang servomotor ay dapat na muling tukuyin upang gumagana lamang ito sa pag-ikot. Pagkatapos ay kailangan mong idikit ang wire ng tanso dito, tulad ng ipinahiwatig sa larawan.
Gayundin sa yugtong ito kakailanganin mo ang isang plastik na tubo ng angkop na lapad, dapat itong nakadikit sa kalahating bilog. Ang sungay ng servomotor ay kasunod na inilagay sa orihinal na lugar nito. Pagkatapos ay maglagay ng isang plastik na tubo sa wire wire. Sa yugtong ito, ang gawain ay maaaring isaalang-alang na nakumpleto.

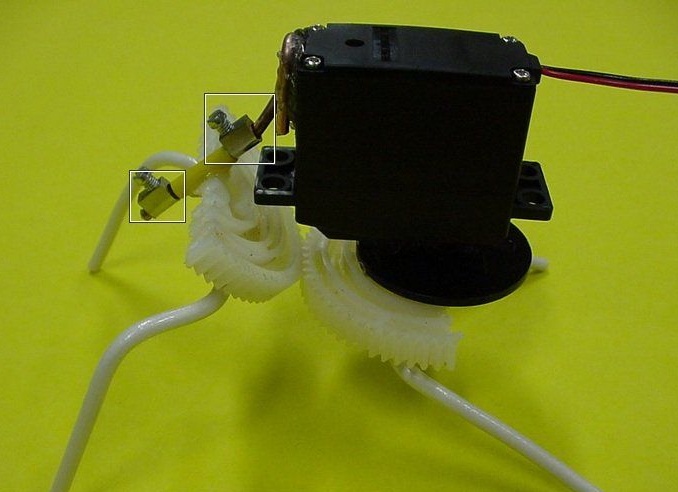
Hakbang Tatlong Paglikha at pag-install ng mga paws ng robot
Ang wire ng tanso ay ginagamit bilang mga binti, dapat itong baluktot tulad ng ipinahiwatig sa larawan. Pagkatapos ay pinangalanan ng may-akda ang mga paws sa semicircles. Maaari mo ring ilakip ang mga may hawak ng baterya sa servomotor.


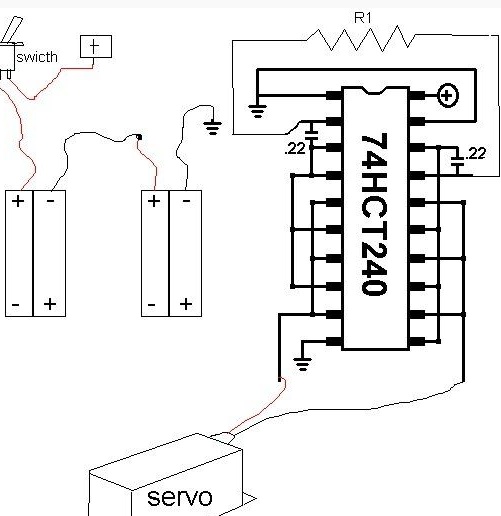
Hakbang Apat Makipagtulungan sa electronics
Marahil ito ang pinakamahirap at mahalagang sandali. Ang buong sistema ay dapat na konektado nang malinaw tulad ng ipinahiwatig sa diagram. Kaagad pagkatapos ng pagkonekta sa robot ay magiging handa, at maaari itong masuri.

Sa pamamagitan ng pagbabago ng anggulo ng mga binti, makakamit mo ang iba't ibang mga katangian mula sa robot. Maaari mo itong gawin nang mas mabilis o mas mabagal. Maaari mo ring magbigay ng kasangkapan ang robot na may mga karagdagang kontrol, halimbawa, isang bigote, kung saan matutukoy nito ang balakid. Maaari ka ring magbigay ng kasangkapan sa isang robot na may mga mata sa anyo ng mga LED, ito ay lilikha ng higit na higit na realismo ng pagkakahawig ng isang buhay na nilalang.
Kailangan mong patakbuhin ang tulad ng isang robot sa isang patag na ibabaw. Upang maiwasan ang kanyang mga binti mula sa pagdulas, ang Cambrices ay maaaring magsuot sa kanilang mga dulo.