Tatalakayin ng artikulo kung paano gumawa ng isang miniature vibro-robot gawin mo mismo. Ganyan mga robot kapag naka-on, nagsisimula silang sumayaw sa isang makinis na ibabaw, paikot-ikot na mga bilog sa mesa. Ito ay dahil ang isang hindi balanseng timbang ay naka-install sa engine, na lumilikha ng mga panginginig ng boses. Ang bawat tao'y maaaring magtipon ng tulad ng isang robot sa bahay, nangangailangan ito ng isang minimum na mga kasanayan at materyales.
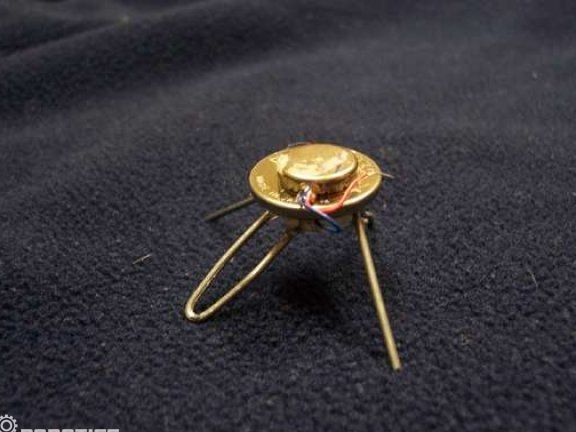
Partikular ito ang modelo Ang robot ay tinawag na Itty Bitty. Dito, ang isang vibro motor mula sa isang lumang mobile phone ay ginagamit dito, at ang robot ay pinalakas ng baterya ng 3V na orasan.
Mga materyales at tool para sa paglikha ng isang robot:
- 3V flat baterya;
- panginginig ng boses motor mula sa isang lumang mobile;
- isang malaking papel na clip;
- paghihinang iron na may panghinang at pagkilos ng bagay;
- de-koryenteng tape;
- mainit na pandikit;
- marker ng madilim na kulay.

Sa mga tool na kailangan mo ng isang file, alkohol at plier.
Ang proseso ng pagmamanupaktura ng robot:
Unang hakbang. Lumikha ng mga binti ng robot
Ang paglikha ng mga binti ng robot ay ang pinakamahalagang sandali sa buong bagay na ito. Ang operasyon ng buong robot ay depende sa kung paano tama ang mga ito ay ginawa. Una sa lahat, ang mga binti ay dapat na malakas, dahil sa panginginig ng boses ang robot ay tumalon nang malakas. Ang mga ito ay ginawa mula sa isang solong piraso ng kawad. Ang isang clip ng papel ay pinakaangkop para sa mga layuning ito. Una sa lahat, dapat itong ituwid at pagkatapos ay nahahati sa 6 pantay na bahagi. Bilang isang resulta, ang haba ng bawat indibidwal na bahagi ay magiging 1/16 pulgada.



Ang isang mahalagang punto kapag nagtatrabaho sa isang clip ng papel ay ang kinis ng kilusan. Kung mabilis mong ibaluktot ang clip, maaari itong masira. Kung ang mga anggulo ay umaabot nang higit sa 90 degrees, dapat itong bilugan.
Ngayon kailangan mong kumuha ng isang marka at ibaluktot ang clip 90 degrees sa lugar na ito, sa kabilang marka ay kailangan mong yumuko sa kabaligtaran na direksyon. Kung ang dulo ng clip ay bilugan habang baluktot, binabawasan nito ang posibilidad ng isang bali.



Sa ikatlong marka kailangan mong gumawa ng isang 90 degree na liko, ngunit ang lugar ng liko ay dapat na malayo hangga't maaari mula sa pagtatapos.
Sa ikaapat na marka, ang isang liko ng 180 degree ay ginawa, ang dulo ay dapat na nasa likod.
Ang isang inflection ng 90 degree ay ginawa sa ikalimang binti, at dapat itong maging malayo hangga't maaari mula sa iba pang dalawang katabing mga binti. Sa konklusyon, ang mga binti ay kailangang ayusin upang ang lahat ay hindi pantay na hawakan ang sahig.


Hakbang Dalawang Pag-install ng engine
Ang baterya ay kumikilos bilang isang sangkap na sumusuporta sa naturang robot. Kailangan mong kumuha ng panginginig at dumikit ng isang vibro-motor dito. Pagkatapos nito, ang isa sa mga wires ng motor ay kailangang maibenta sa contact ng baterya, ito ang magiging pinakamataas na contact. Upang mailapag ang panghinang, ang baterya ay kailangang bahagyang ma-scratched, maaari itong gawin sa isang file.

Hakbang Tatlong I-glue ang mga binti
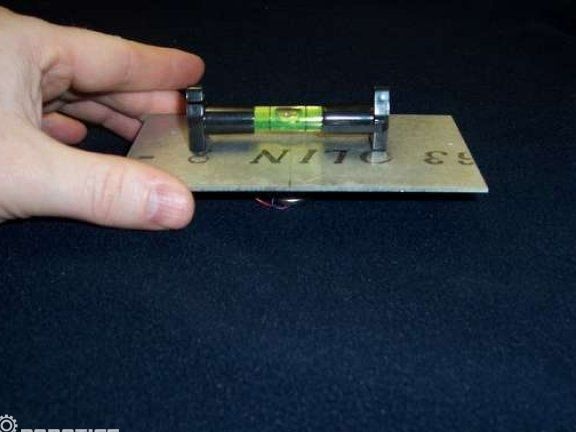
Ngayon ang lahat ng natitira ay upang idikit ang mga binti sa robot. Upang gawin ito, kailangan mong ilagay ang baterya sa mesa, at sa itaas nito ilagay ang mga binti ng robot. Susunod, ang mga binti ay kailangang idikit; para dito, ang isang linear level o piraso ng aluminyo ay maaaring mailapat sa mga binti. Bago mag-apply ng pandikit, ipinapayong i-degrease ang ibabaw ng baterya na may alkohol. Hindi na kailangang ikinalulungkot ang pandikit, dahil kapag nagtatrabaho sa mga binti, kumilos ang isang sapat na malaking puwersa. Kung idikit mo nang masama ang mga paa, maaaring bumagsak ang robot sa panahon ng operasyon.
Hindi na kailangang magmadali upang patakbuhin ang robot, ang kola ay dapat na matatag. Inirerekomenda ng may-akda na ilagay ang workpiece sa ref, kaya mas mabilis ang drue.


Iyon lang, handa na ang robot at maaari mo itong suriin. Upang i-on ang robot, kailangan mong kumuha ng isang piraso ng de-koryenteng tape at idikit ang pangalawang kawad mula sa motor patungo sa terminal ng baterya. Sa pamamagitan ng paglalagay ng robot sa isang makinis na talahanayan, maaari mo na ngayong obserbahan kung ano ang gagawin nito.