
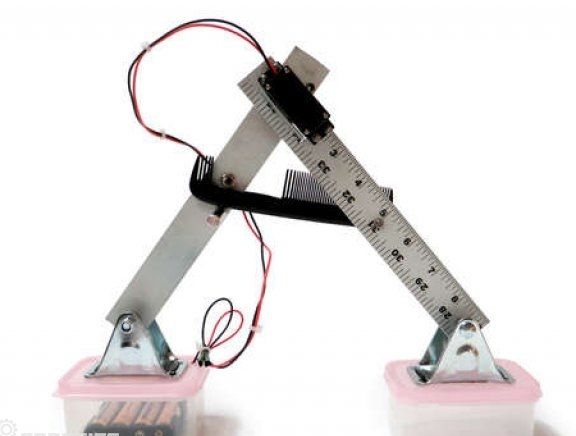
Ang kakaiba ng tulad ng isang robot ay na ito ay tipunin mula sa isang linya ng pagsukat at mga gamit sa sambahayan. Ang robot tumutukoy sa uri ng paglalakad. Ayon sa may-akda, kasama ang lahat ng kinakailangang mga tool at materyales, ang pag-iipon ng naturang robot ay tatagal lamang ng ilang oras.
Mga materyales at tool para sa pagpupulong:
- naka-configure ang servomotor para sa direktang pag-ikot;
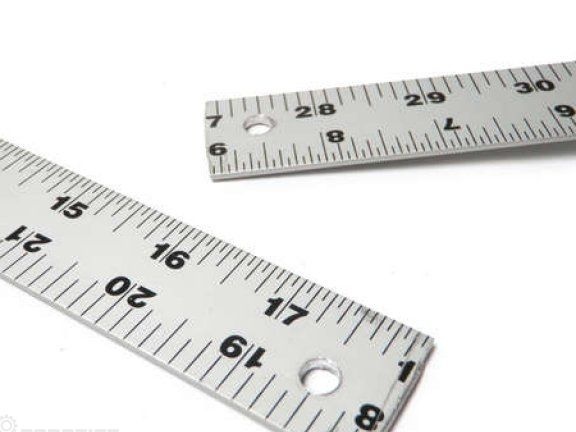
- mga pinuno ng aluminyo na may sukat na 2 - 18 ";
- dalawang maliit na lalagyan ng pagkain;
- dalawang roller na may gulong 2 "- 3" sa laki;
- isang ordinaryong bolpen pen;
- isang scallop;
- sampung maliit na bolts na may mga mani;
- apat na maliliit na tagapaghugas ng pinggan;
- isang metal counterweight 2 "- 3";
- apat na rivets;
- isang uri ng switch DPDT;
- Taglay ng baterya ng AA;
- apat na baterya ng AA;
- dalawang wires ng iba't ibang kulay (itim at pula);
- de-koryenteng tape.

Ang proseso ng pagmamanupaktura ng robot:
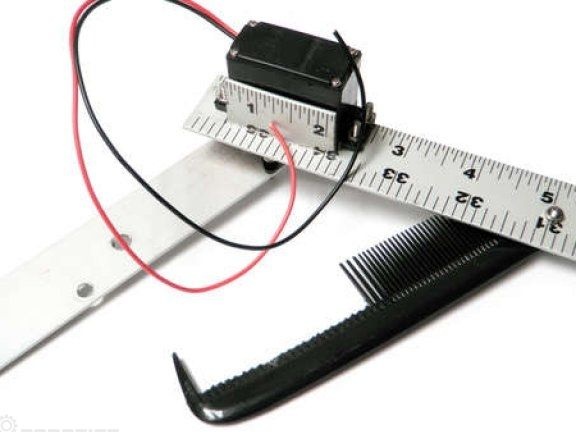
Unang hakbang. Gupitin ang namumuno
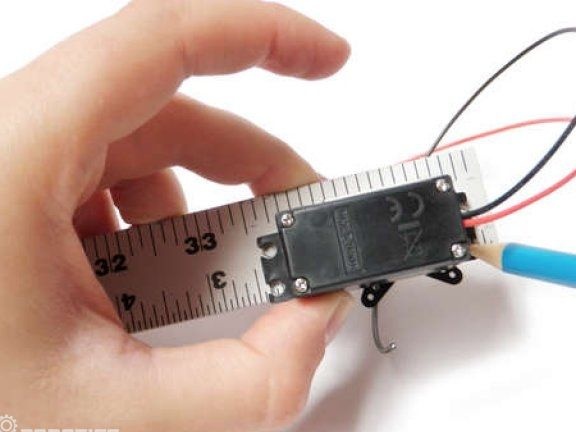
Una kailangan mong kumuha ng isang namumuno at gupitin ito sa isang lagari ng bench. Sa kabuuan, dapat makuha ang dalawang mga segment ng siyam na pulgada.



Hakbang Dalawang Lumikha ng mga marka
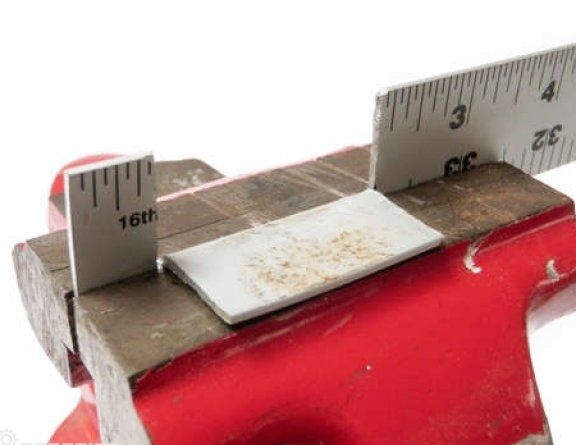
Sa isang piraso ng namumuno kailangan mong gumawa ng dalawang 3/4 incision. Mula sa isang gilid, ang lalim nito ay dapat na 1/2 ", at mula sa iba pang 2-1 / 8". Susunod, ang pinuno ay dapat na mai-clamp sa isang bisyo at gamit ang martilyo upang ibaluktot ang seksyon, ito ang magiging batayan para sa pag-mount ng engine.



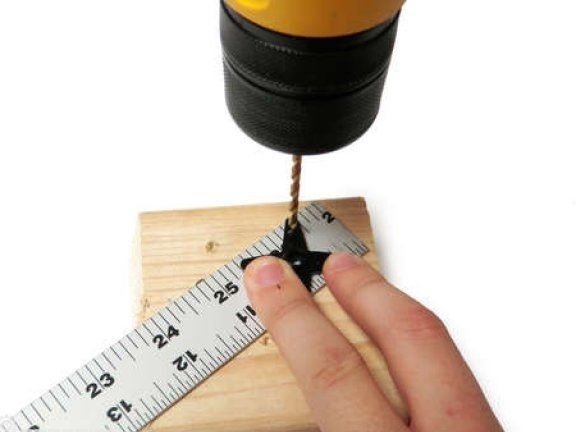
Hakbang Tatlong Mag-drill hole
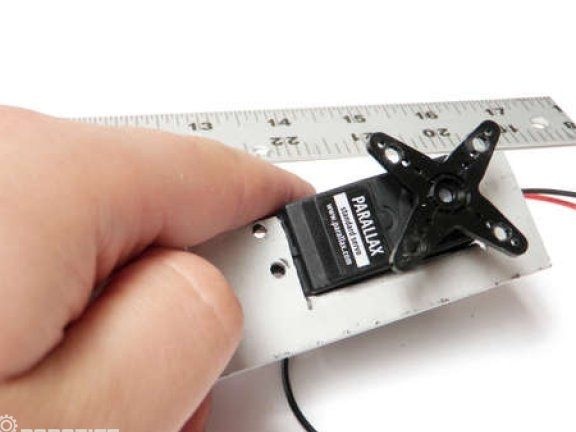
Ngayon kailangan mong kunin ang servomotor at ilakip ito sa lugar kung saan ito mai-mount. Pagkatapos ay may isang lapis kailangan mong gumawa ng mga marka kung saan pagkatapos ay kailangan mong mag-drill ng mga butas na may diameter na 1/8 ".



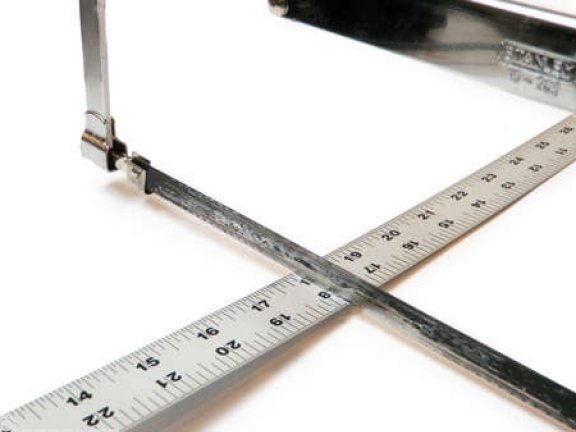
Ngayon kailangan mong mag-drill ng butas 1/4 ", humakbang pabalik mula sa dulo ng pinuno ng 1/2". Ang butas ay drill sa kabaligtaran na dulo mula sa kung saan mai-install ang engine. Ang parehong butas ay dapat na drill sa dulo ng isa pang piraso ng namumuno.


Ngayon ay kailangan mong mag-drill ng mga butas sa mga blades ng servo, para sa mga ito kailangan nilang alisin. Sa kabuuan, kailangan mong mag-drill ng 4 na butas tulad ng ipinahiwatig sa larawan na may diameter na 1/8 ". Susunod, ang mga blades ay kailangang naka-attach sa gilid ng pinuno, na humakbang mula sa dulo 1/2". Ngayon katulad ng apat na butas ay kailangang gawin sa namumuno.





At sa wakas, kailangan mong mag-drill hole 1/8 ", lumakad mula sa pag-mount ng lokasyon ng engine 5". Kailangan mo ring mag-drill ng 3/16 hole sa mount engine. Kailangan mo ring mag-drill ng isa pang malaking butas na kung saan magkasya ang servo screws. Iyon lang, ang lahat ng mga butas para sa pag-iipon ng istraktura ay handa na.
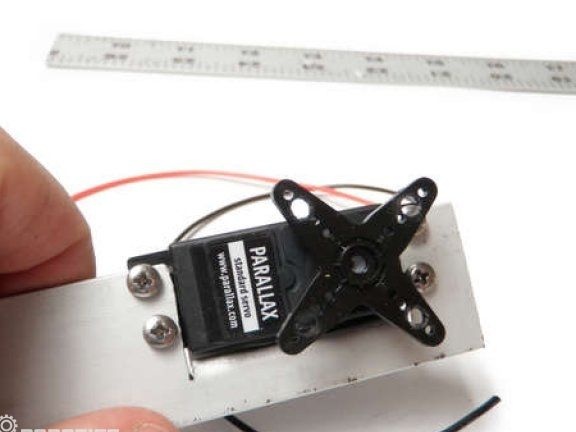
Hakbang Apat Pag-install ng engine
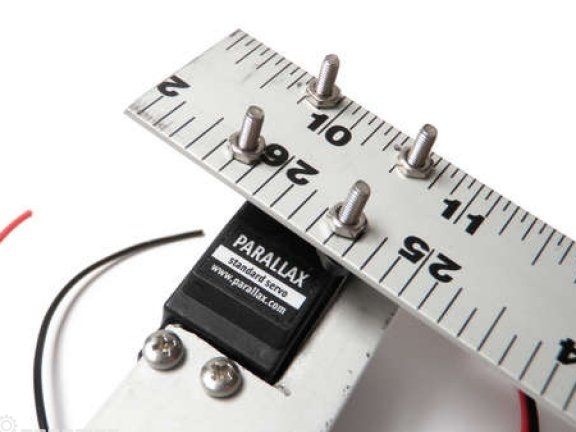
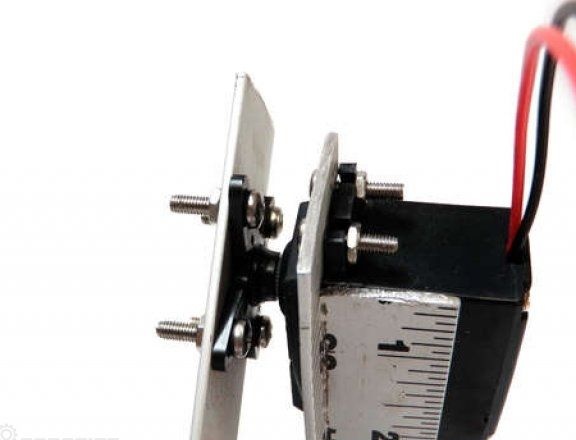
Ang engine ay dapat na mai-mount sa isang namumuno na may mga nuts at bolts.Upang matiyak ang isang mababang profile, ang mga ulo ng tornilyo ay dapat na matatagpuan sa gilid ng mga blades ng servo. Pagkatapos nito, ang ikalawang kalahati ng pinuno ay dapat na nakadikit sa mga blades ng servomotor. Sa kasong ito, ang mga ulo ng tornilyo ay dapat na lumiko sa loob upang walang makagambala sa paggalaw ng mga namumuno.

Hakbang Limang Paghahanda ng scallop
Sa isang bahagi ng scallop, dapat alisin ang dalawang pulgada ng mga ngipin. Ang pinakamadaling paraan upang gawin ito ay may isang tagputol sa gilid. Sa gilid ng scallop, kailangan mong mag-iwan ng isang tiyak na bilang ng mga clove, salamat sa kanila ang magsuklay ay susubaybayan. Sa gilid, kailangan mong mag-drill ng isang 1/8 "hole. Sa pangwakas na yugto, ang magsuklay ay maingat na nababalot ng papel de liha sa isang maayos na estado.






Hakbang Anim Pag-install ng Scallop
Ang isang tornilyo ay dapat na ipasok sa butas ng scallop, pagkatapos na ang dalawang washers ay dapat ilagay sa tornilyo, papayagan ka nitong kunin ang suklay mula sa mga pinuno sa isang tiyak na distansya. Sa pangwakas na yugto, ang bolt ay naka-install sa isang namumuno, at pagkatapos ay ang scallop ay naayos na may isang nut.

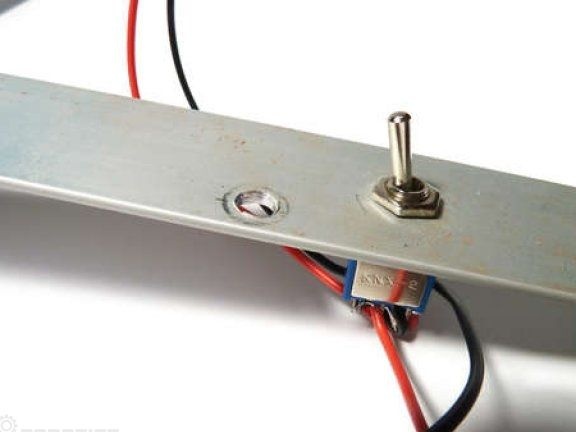
Ikapitong hakbang. Lumipat ng pag-mount
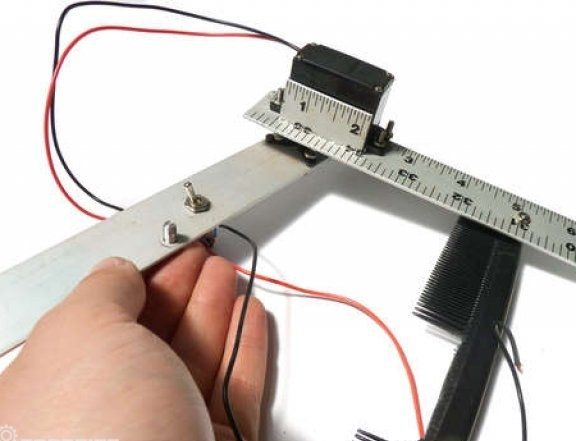
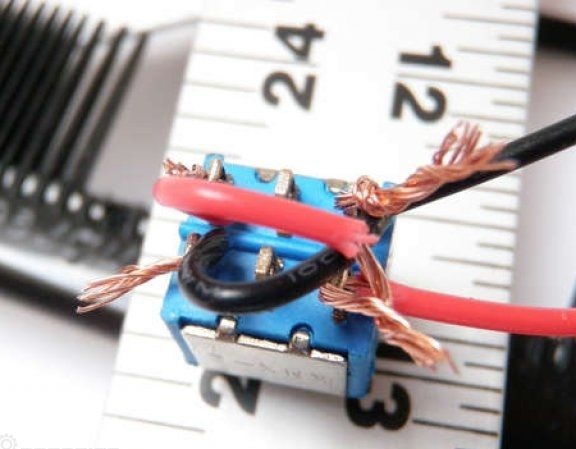
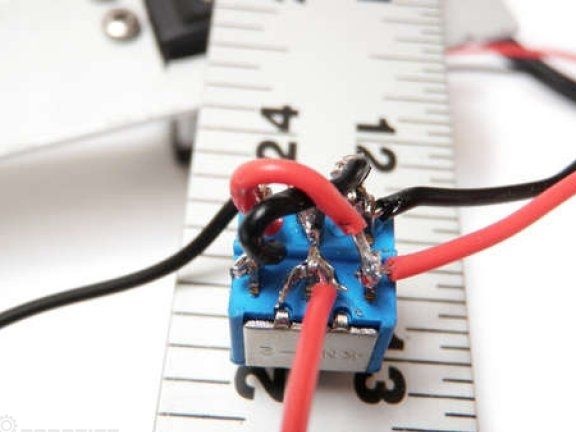
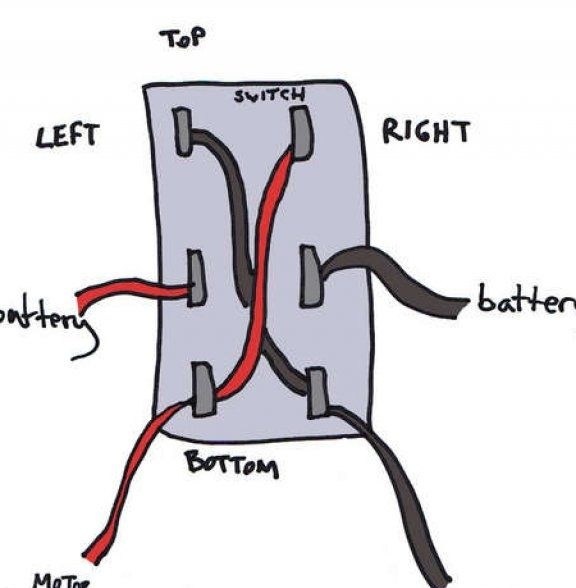
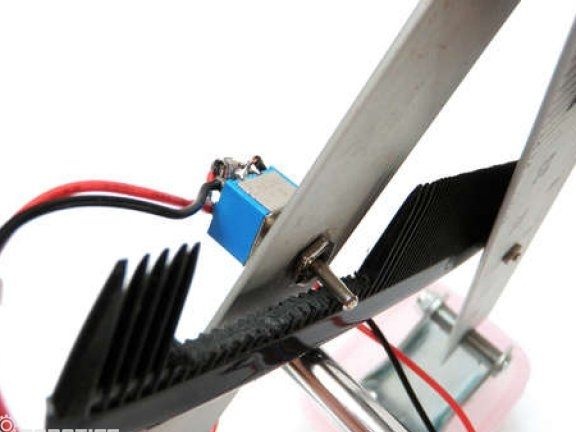
Ang switch ay dapat na maipasok sa naghanda na butas at secure na may isang nut. Ang switch ay dapat na maipasok sa posisyon na ipinahiwatig sa mga litrato. Ngayon ay kailangan mong kumuha ng dalawang piraso ng kawad, pula at itim, at ibebenta ang mga ito sa switch tulad ng ipinapakita sa larawan. Pagkatapos ay kailangan mong magbenta ng dalawang mahabang wires sa mga contact sa gilid ng switch.

Hakbang Walong. Pag-install ng counter.
Ang counterweight ay naka-install sa bahaging iyon ng linya kung saan naka-install ang servomotor. Ang suklay ay naka-mount sa tuktok ng counterweight.
Hakbang Siyam. Gupitin ang hawakan
Kunin ang ampoule mula sa bolpen pen at pagkatapos ay i-cut ang pen sa dalawang piraso ng isang pulgada. Susunod, ang mga panindang tubo ay kailangang i-cut sa kalahati, bilang isang resulta, apat na tubo ang lalabas.


Hakbang Sampung Pagkuha ng gulong
Ngayon kailangan mong kumuha ng dalawang roller at i-disassemble ang mga ito sa pamamagitan ng pag-alis ng mga gulong. Ang mga gulong ay kailangang isantabi; maaari itong magamit sa iba. gawang bahay.



Hakbang labing-isang. Lumikha ng mga puntos ng pivot
Ang pabahay mula sa roller ay dapat ilagay sa gitna ng takip ng plastic container. Ngayon kailangan mong mag-drill ng apat na butas at mai-secure ang elemento na may mga kurbatang.

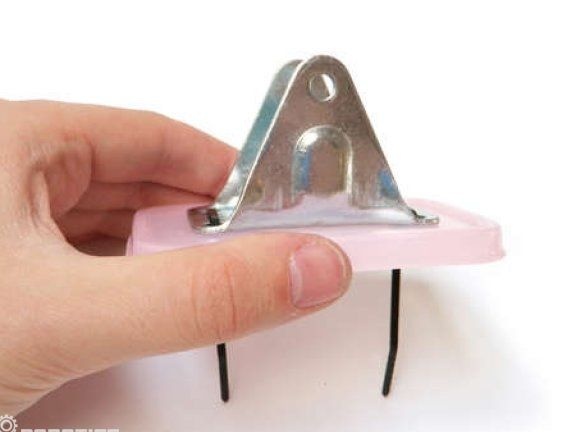

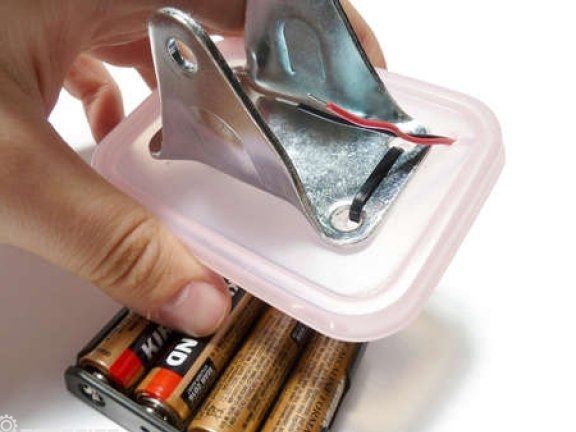


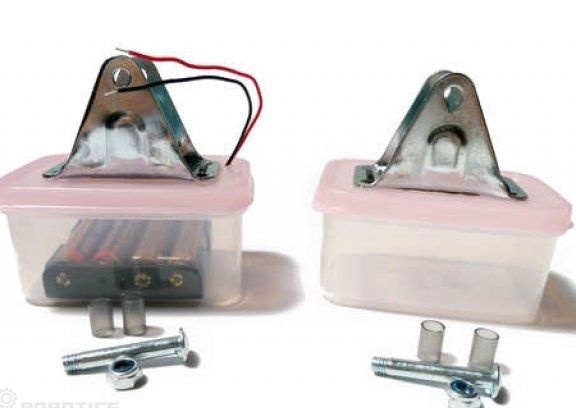

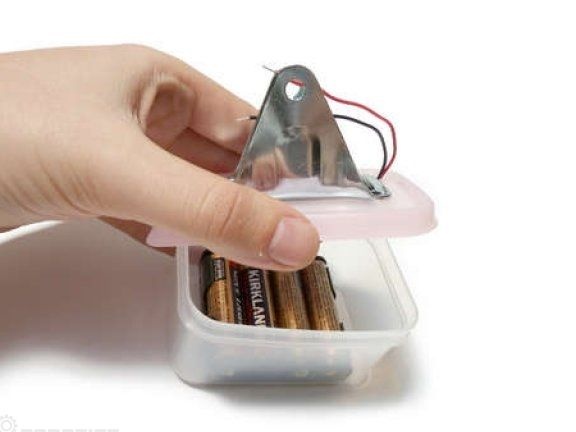

Gayundin sa yugtong ito, maaari kang mag-install ng isang mapagkukunan ng kuryente. Upang gawin ito, sa isa sa mga lalagyan kailangan mong mag-drill ng isang butas at i-install ang mga baterya sa loob. Kasunod nito, sa pamamagitan ng drilled hole, kailangan mong i-output ang mga kable.
Hakbang Labindalawa. Assembly ng Robot
Susunod, ang mga dulo ng parehong mga namumuno ay dapat na nakadikit sa mga suporta tulad ng ipinahiwatig sa mga litrato. Ngayon ay nananatili lamang upang ikonekta ang mga wire mula sa kapangyarihan at switch, madaling gawin ayon sa mga kulay ng mga wire.
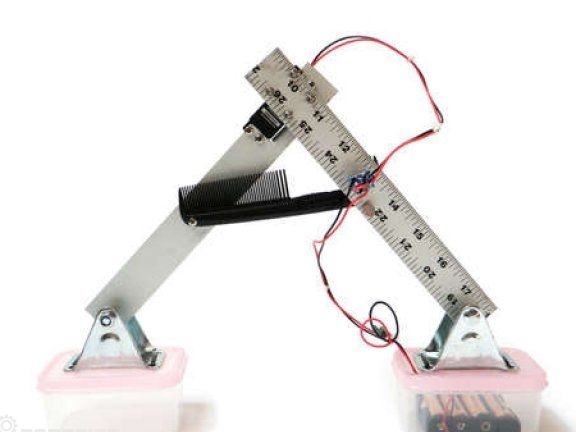
Iyon lang, handa na ang robot. Kapag tumatakbo ang makina, nagsisimula ang paglipat ng robot, sa ilang mga punto, ang scallop ay patayin ang kapangyarihan at ang mga binti ng robot ay bumalik sa kanilang orihinal na estado. Pagkatapos ang switch ay lumiliko muli sa circuit, at ang mga binti ng robot ay nai-compress muli. Kaya pupunta siya.