

Ang robot Ang DIY ay magiging isang mahusay na laruan para sa mga bata, kasama nito maaari kang maglaro ng mga kamag-anak o kaibigan. Ang kakanyahan ng robot ay ang mga sumusunod. Ito ay isang kahon na may switch. Sa sandaling may nag-click sa isang switch sa isang kahon, isang pinto ay nagsisimula upang buksan, mula sa kung saan lumabas ang isang kamay at ibabalik ang switch sa kanyang orihinal na estado. Sa kabila ng panlabas na pagiging simple ng robot, sa katunayan, ang lahat ng ito ay mukhang nakakatawa.
Ang batayan para sa paglikha ng isang robot ay isang circuit Arduino. Mayroon ding ilang mga elemento ng mekanikal na tatalakayin sa ibaba. Isaalang-alang natin nang mas detalyado kung paano gawin mo mismo mag-ipon ng tulad ng isang robot.
Mga materyales at tool para sa pagmamanupaktura:
- Arduino board, ang anumang may mga output ng PWM;
- servomotor, dalawang piraso (angkop ang modelo Ang Futaba - S3003, ang lakas ng naturang engine ay sapat na upang buksan ang pinto, ang aparato ay gumagawa ng hanggang sa 3.2 kg / cm ng kapangyarihan);
- baterya;
- uri ng switch ng SPST o SPTT;
- isang switch upang makontrol ang lakas ng baterya;
- kailangan mo ng isang pindutan upang i-restart ang Arduino;
- wires, jumpers at iba pang maliliit na bagay.

Bilang karagdagan, kakailanganin mo rin ang isang gearbox (angkop para sa mga sasakyan na kinokontrol ng radyo), isang board para sa isang de-koryenteng motor na tinatawag na Arduino motor shield, isang RC servo motor. Ang mga sangkap na ito ay kinakailangan upang gawin ang paglipat ng kahon, tulad ng may-akda.
Upang mabawasan ang antas ng ingay sa panahon ng pagpapatakbo ng aparato, isang electrolytic type capacitor na may nominal na halaga ng 10mF, isang 10K risistor, at isang 74HC04 inverter ay kinakailangan.
Ang proseso ng pagmamanupaktura ng robot:
Unang hakbang. Paano gumawa ng isang kahon
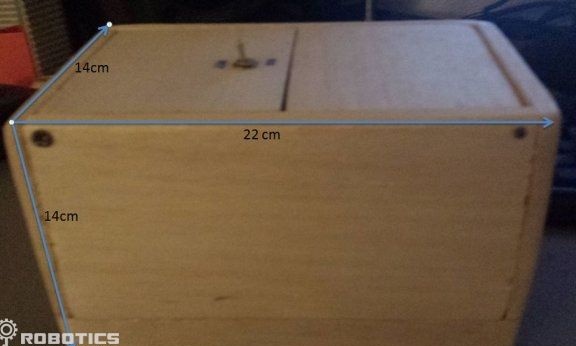
Upang lumikha ng isang kahon, iyon ay, isang katawan ng robot, kailangan mong makahanap ng playwud o tapunan. Bilang karagdagan, kailangan mo ng isang malakas na pandikit para sa gluing kahoy. Mahalagang maunawaan na kung mas maraming timbangin ang istraktura, mas maraming enerhiya ang maubos. Tulad ng sa laki ng kahon, ito ay 22cm x 14cm x 14cm.
Hakbang Dalawang Diagram ng eskematiko e mga bahagi
Ang tuktok ng robot ay may kasamang isang Arduino main board, dalawang servos, at isang switch. Tulad ng para sa circuit, na may pananagutan sa dami ng ingay, maaari itong mapalitan ng isang ordinaryong risistor.
Ang mga drive ng Servo ay pinapagana sa pamamagitan ng ikalimang pin ng board ng Arduino. Tulad ng para sa mga wire ng signal, konektado sila sa mga contact 9 at 10. Salamat sa mga contact na PWM na ito, kinokontrol ang anggulo ng pag-ikot ng servomotor. Ito ay isang anggulo mula 0 hanggang 180 degree.
Ang pulang pindutan ay kinakailangan upang mai-restart ang Arduino.
Sa ilalim ng circuit ay ang Arduino motor shield board.Sa board maaari mong makita ang dalawang mga channel, A at B, salamat sa kanila, kung nais, maaari mong kumonekta ang dalawang motor nang sabay-sabay. Ang pangunahing gawain ng board na ito ay na kasama nito maaari mong i-programmatically itakda ang bilis ng pag-ikot, direksyon, mga break para sa anumang channel ng mga engine. Kung titingnan mo ang diagram, pagkatapos ay ginagamit ang channel B, habang ang contact 13 ay tumutukoy sa direksyon, ang contact 11 ay bilis, at ang contact 8 ay ginagamit upang makontrol ang preno.
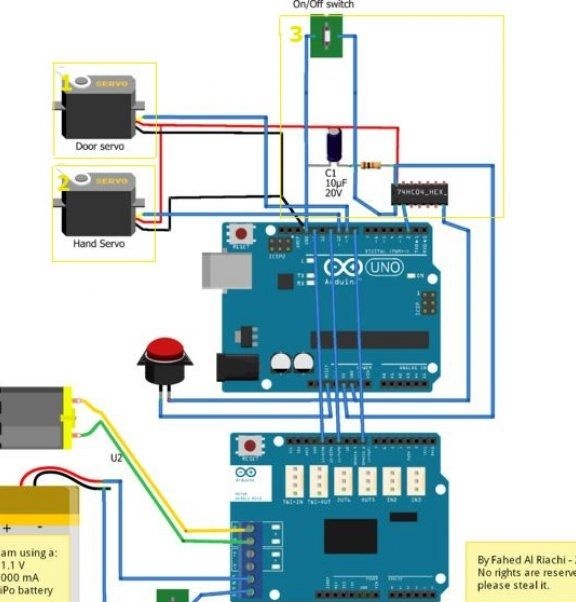
Ang pinagmulan ng kuryente ay isang baterya na 11.1 / 1000 mA, kumokonekta ito sa board ng kalasag na motor Arduino. Kung hindi ito gagamitin, pagkatapos ang baterya ay direktang konektado sa pangunahing board.
Hakbang Tatlong Pag-install ng engine
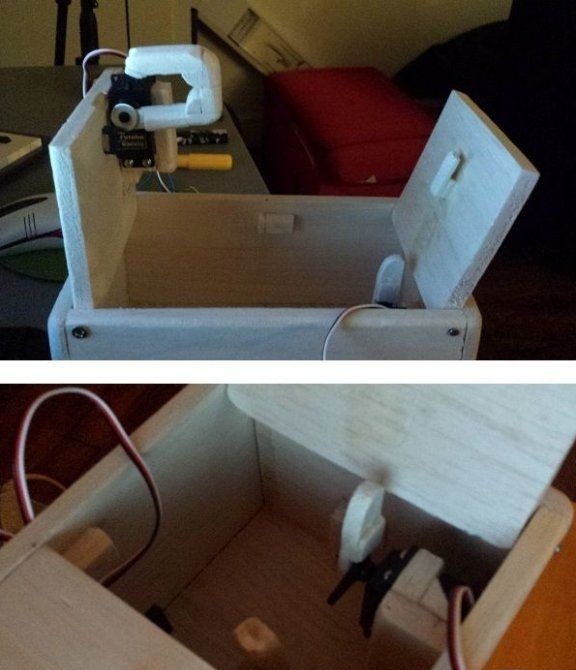
Ang servo drive at mga kamay ay naka-install nang eksperimento, kailangan mong suriin sa pagsasanay kung gumagana nang tama ang mga mekanika. Upang suriin ang radius ng paglihis ng mga makina, maaari mong gamitin ang programang Arduino IDE.
Para sa paggawa ng mga kamay na kinuha ng kahoy ng anumang uri. Ang pangunahing bagay ay ito ay magaan, dahil kung hindi man ay tataas ang pagkonsumo ng enerhiya. Tulad ng para sa laki ng kamay, nababagay ito sa panahon ng pag-install, pagpili ng nais na haba, ang nais na epekto ay nakamit.
Ang takip ng pusher at kamay ay naka-mount upang hindi nila hawakan ang servomotor sa panahon ng operasyon.
Hakbang Apat Ikinonekta namin ang servomotor at lumipat sa Arduino
Gamit ang mga wire at jumpers, kailangan mong ikonekta ang lahat ng mga elektronikong elemento sa bawat isa ayon sa tinukoy na pamamaraan. Ang mga wire ay dapat na mailagay upang hindi sila makagambala sa mga gumagalaw na elemento ng robot.
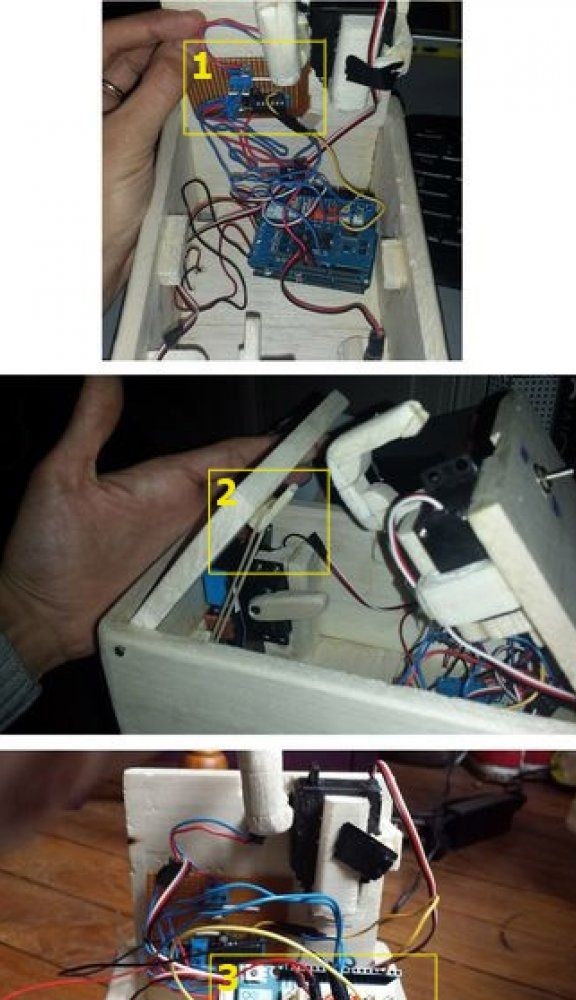
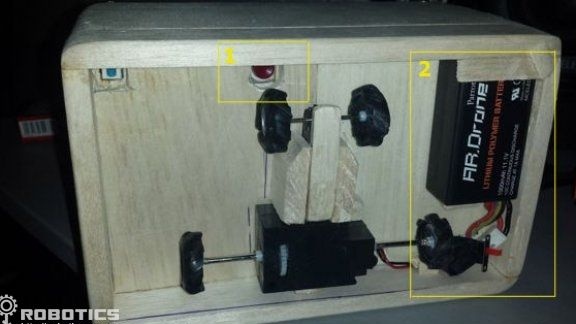
Sa ilalim ng numero 1, makikita mo kung paano ito konektado at kung saan matatagpuan ang paglipat ng circuit. Ang numero ng 2 ay nagmamarka ng isang elemento bilang isang nababanat na banda, kinakailangan upang ang pinto ay magbukas nang may ilang pag-igting. Sa gayon, ang bilang 3 ay nagpapahiwatig ng kalasag ng engine na naka-install sa Arduino.
Hakbang Limang Pag-install ng mekanikal na bahagi para sa paglipat ng kahon
Sa ilalim ng kahon ay isang baterya, isang makina na may mga gulong, isang gearbox, isang pindutan ng pag-reset, at isang toggle switch upang makontrol ang kapangyarihan ng robot. Bago i-attach ang mga elemento, kailangan mong kalkulahin ang balanse ng bigat ng kahon. Upang ang robot ay maging matatag, bilang karagdagan sa nangungunang axis, naka-install ang isa pang karagdagang isa.
Hakbang Anim Isa pang karagdagang tampok
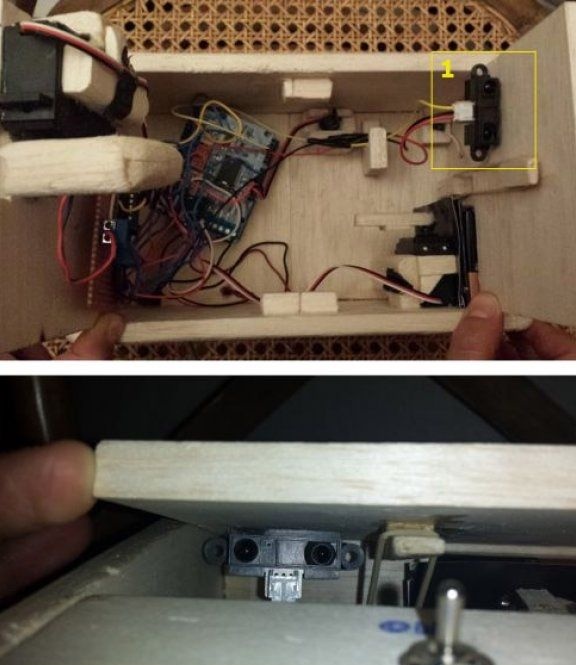
Upang matukoy ng robot ang direksyon ng paggalaw, maaari itong magamit sa isang sensor ng IR. Kasabay nito, kapag sinubukan ng isang tao na hawakan ang switch ng toggle, ang kahon ay lilipat sa kaliwa at pakanan. Para sa mga layuning ito, angkop ang sensor ng GP2Y0A21, mayroon itong tatlong mga wire. Dapat na konektado ang dilaw sa ikatlong pin ng Arduino, pula hanggang pin 5, at itim hanggang sa lupa.
Iyon lang, isang simple at sa parehong oras nakakatawa robot ay handa na. Ang ganitong laruan ay magdudulot ng kagalakan hindi lamang sa bata, ngunit nakakagulat din sa maraming mga may sapat na gulang.
Firmware: