
Mga materyales at tool para sa pagmamanupaktura:
- may sinulid na shaft;
- playwud;
- mga bolts at mani;
- mga bearings ng bola;
- motor ng stepper tulad ng Nema 23;
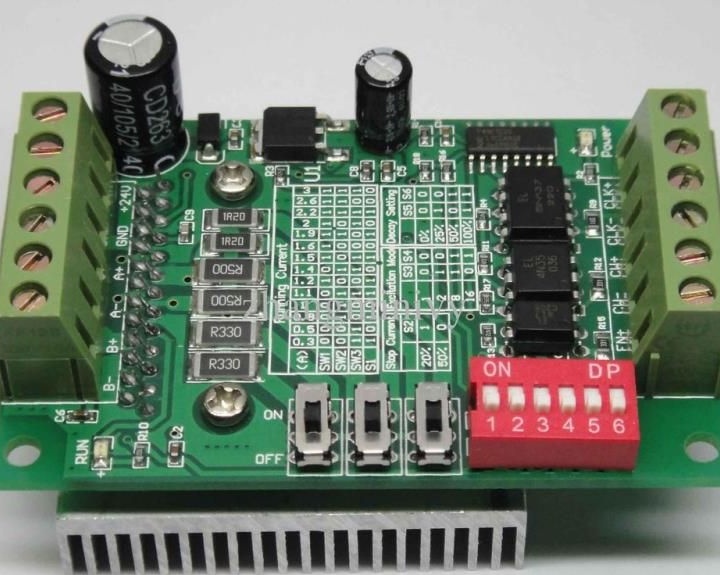
- Ang mga driver ng TB6560 ay kinakailangan para sa mga motor na stepper;
- ang pag-install ay pinalakas ng isang boltahe ng 24 V 15 A;
- Arduino UNO R3;
- metal bushings, pati na rin ang bushings na gawa sa nylon (posible mula sa caprolon o fluoroplastic);
- mga wire.









Proseso ng paggawa
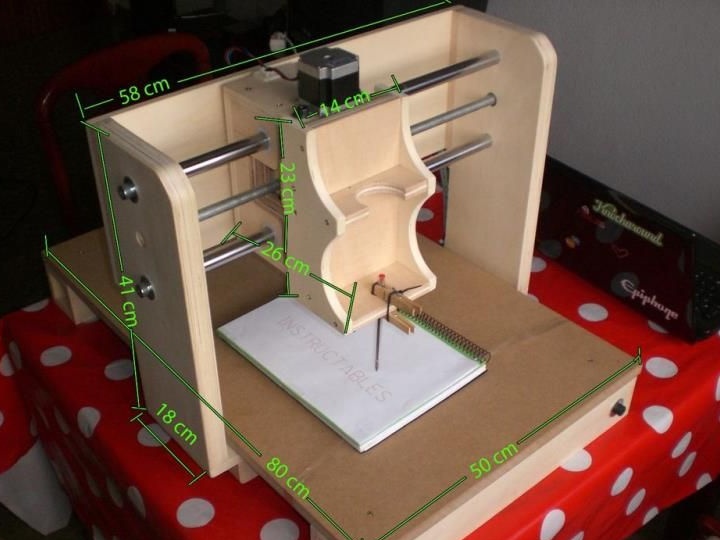
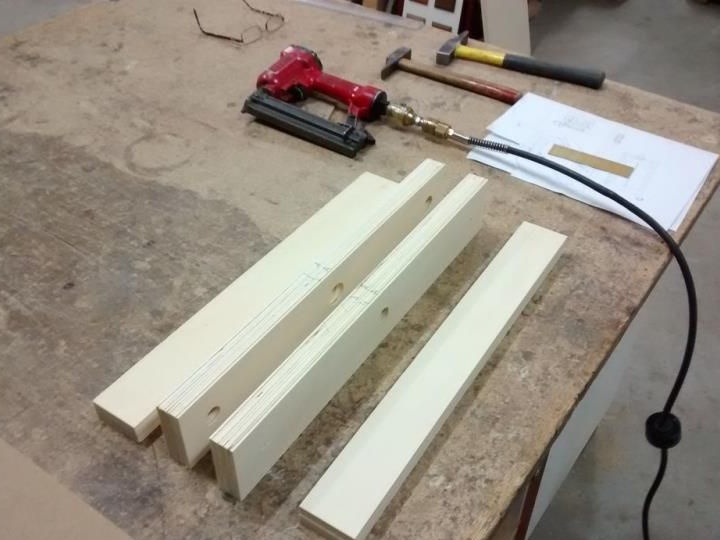
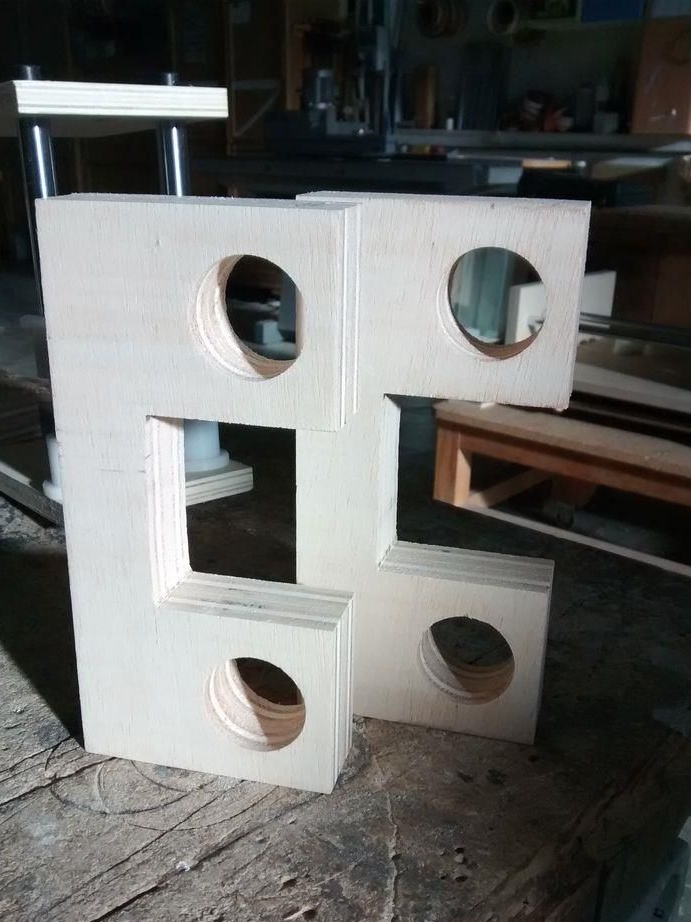
Unang hakbang. Ang paggawa ng base ng makina (X axis)
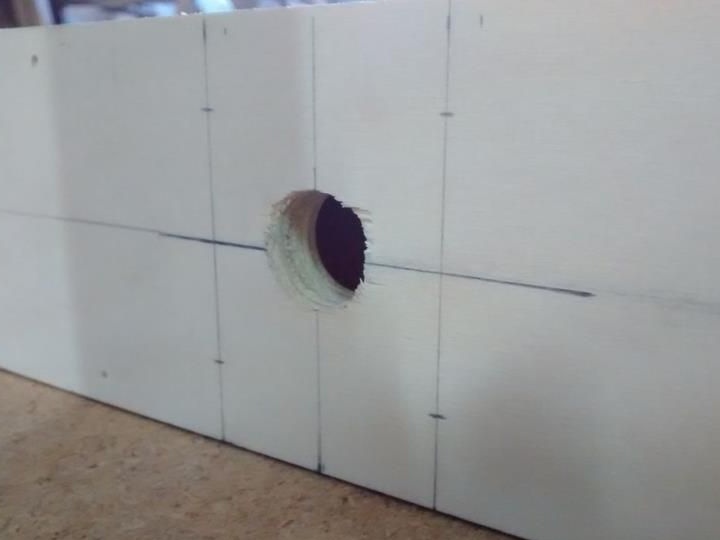
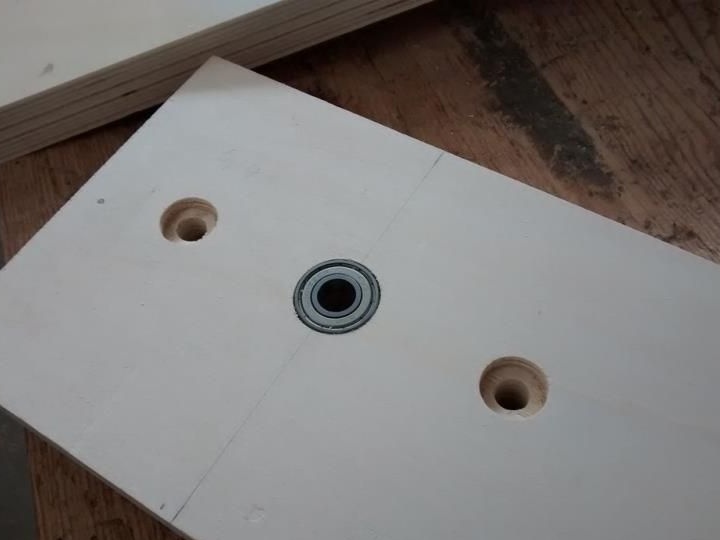
Upang makagawa ng base, kakailanganin mo ang maraming mga bar kung saan kakailanganin mong mag-drill ng maraming bulag at sa pamamagitan ng mga butas. Pagkatapos ay i-install ang mga shaft ng metal, nagsisilbi silang drive para sa X axis.
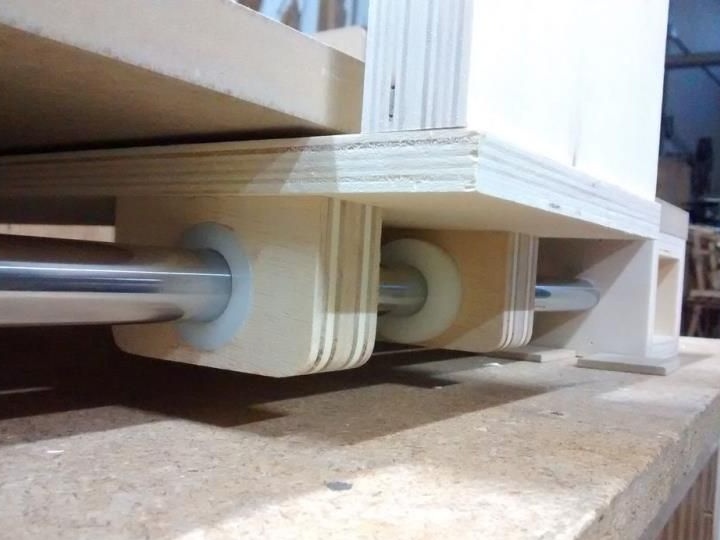
Ang sinulid na baras ay naka-install sa gitna, at ang dalawang mga shaft ng bakal ay naka-install sa mga panig bilang mga gabay. Kapag ang may sinulid na baras ay umiikot, ang karwahe ay gumagalaw sa sinulid na talahanayan kasama ang X axis.
Ang bar ay dapat na makapal hangga't maaari, dahil mas mabigat ang base, mas maaasahan ang makina sa panahon ng operasyon. At ito, sa turn, ay nagpapabuti sa pagkakagawa sa panahon ng trabaho.






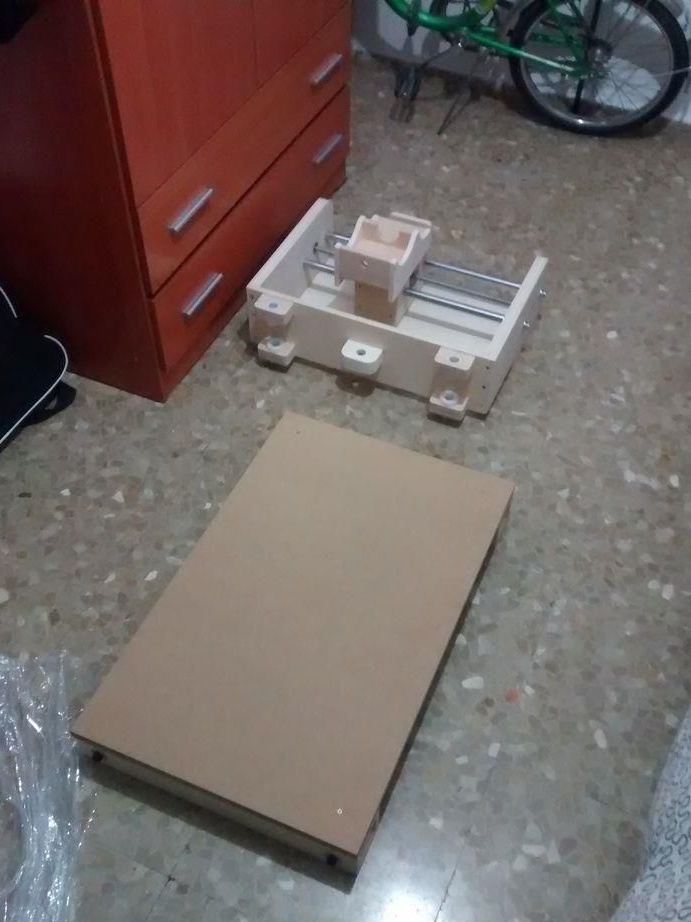
Hakbang Dalawang Lumikha ng axis Y
Ang istraktura ng portal para sa Y axis ay nilikha sa parehong paraan tulad ng batayang X. Ang portal ay naayos sa isang movable table, na gumagalaw sa X axis.Sa nangyari ito, maaari mong makita sa larawan.




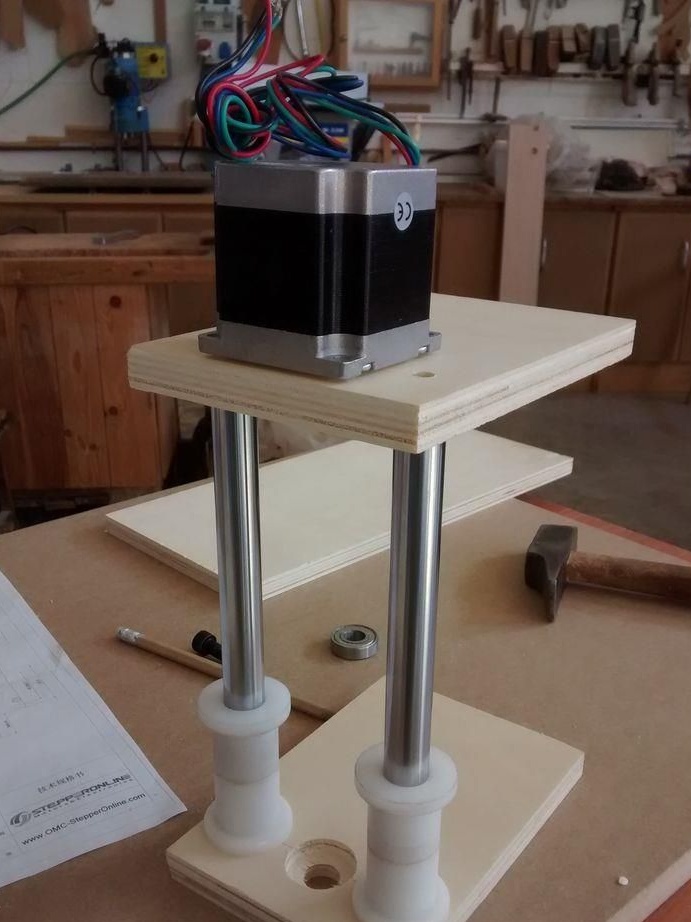
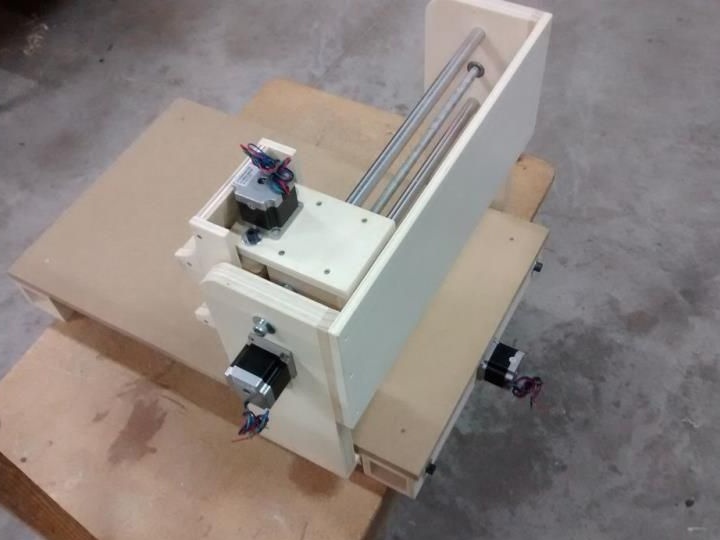
Hakbang Tatlong Lumikha ng Z axis
Ang Z axis ay nilikha na eksaktong katulad ng dalawang nauna. Dahil sa axis na ito mayroong isang patayong kilusan ng nagtatrabaho na katawan, na pinapakain ang tool.











Hakbang Apat Pagpupulong ng asembleya
Karagdagan, matapos na ang lahat ng mga elemento ay nakagawa na, ang makina ay maaaring tipunin at hindi kumplikado ang prosesong ito. Upang ikonekta ang mga elemento, ginagamit ang mga bolts na may mga mani. Ang mga sukat ng makina ay maaaring magkakaiba, lahat ay nakasalalay sa mga personal na pangangailangan.Kung sa panahon ng proseso ng pagpupulong ay nasira ang anumang mga elemento, hindi mo kailangang gumamit ng pandikit upang maayos ang mga ito, mas mahusay na muling paggawa ng elemento. Sa kasong ito, ibibigay ang kinakailangang higpit ng mga elemento.


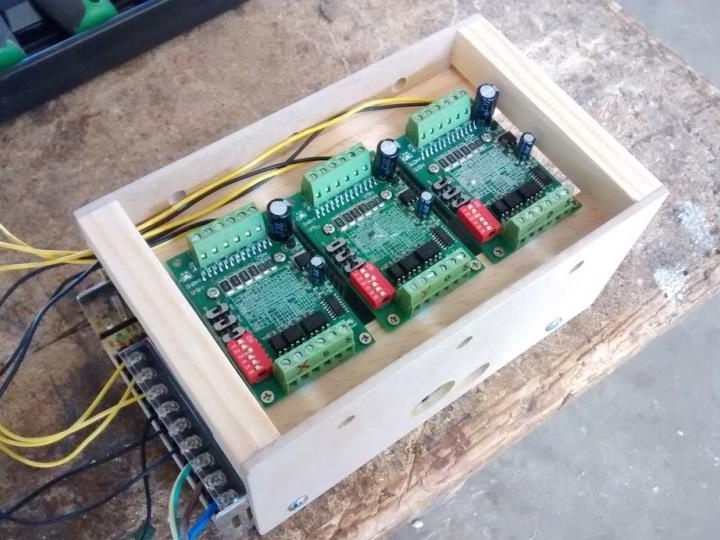
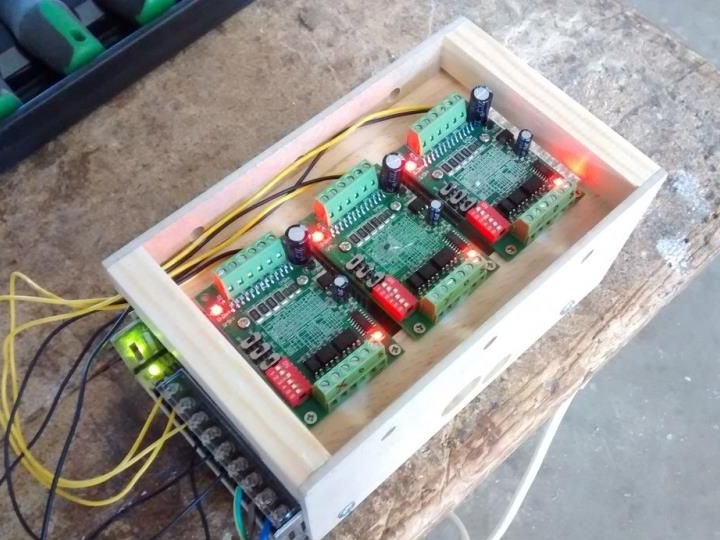
Hakbang Limang Ang elektronikong bahagi ng aparato
Kapag ang mekanikal na bahagi ay tipunin, maaari kang magpatuloy sa proseso ng pagkonekta sa electronics. Kailangan mong ikonekta ang Arduino sa mga driver at motor ng stepper. Ang bawat driver ay nangangailangan ng isang mapagkukunan ng kapangyarihan upang gumana. Gumamit ang may-akda ng isang 24 V 15 Isang suplay ng kuryente .. Tulad ng para sa driver, narito na napili nang isa-isa depende sa lakas ng engine. Ang mga motor coil at ang kanilang mga poste ay ipinahiwatig ng mga letrang A +, A-, B +, B-.

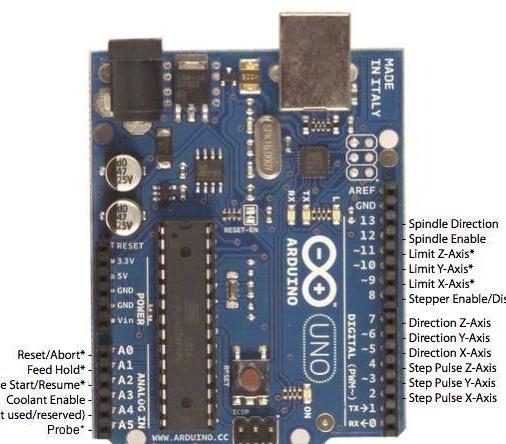



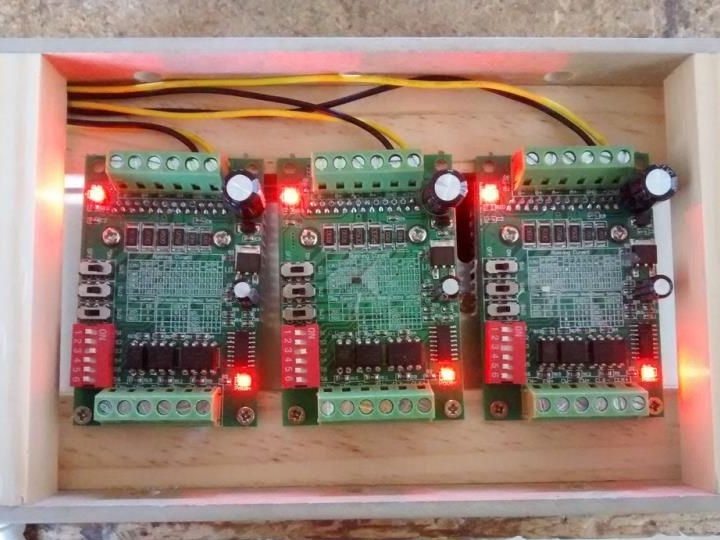

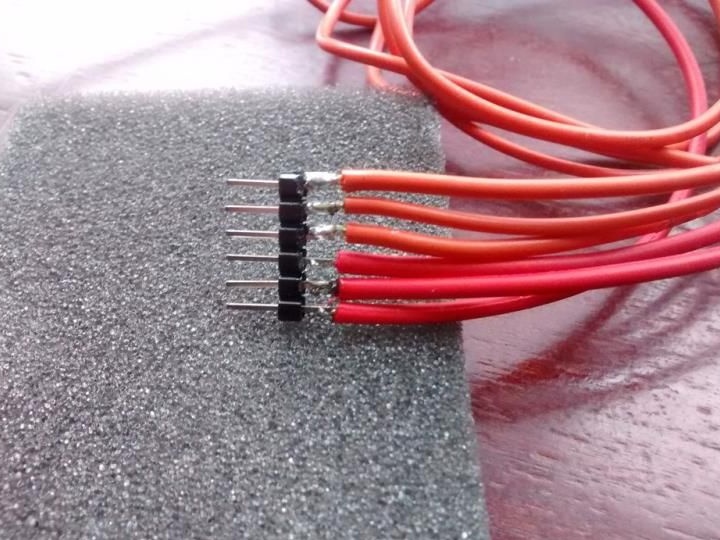
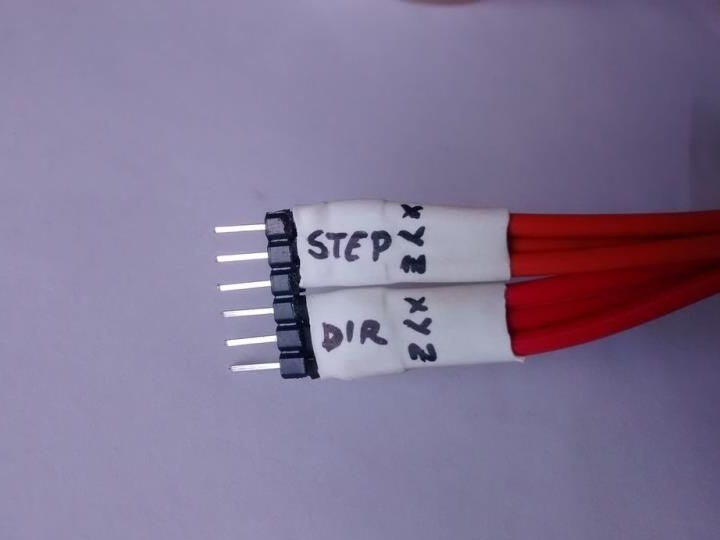

Ang output ng CLK + ay dapat na konektado sa pin pin sa Arduino. Ang CW + pin ay dapat na konektado sa pin ng direksyon. Well, ang CLK- at CW ay kailangang konektado sa GND pin. Hindi ginagamit ang mga contact EN + EN-.
Hakbang Anim Ang bahagi ng software ng aparato
Ang susunod na hakbang ay ang pag-download ng software na makokontrol ang makina. Ang proseso ay hindi kumplikado, kailangan mong i-download ang code gamit ang XLoader program sa Arduino board. Pagkatapos nito, kailangan mong buksan ang GCodeSender upang ikonekta ang board ng Arduino sa isang personal na computer. Pagkatapos nito, ang board ay handa na upang makontrol ang CNC machine.
Iyon lang, handa na ang makina, maaari mong subukan ito sa pagsasanay. Upang itakda ang mga kinakailangang mga parameter para sa pagproseso ng bagay, kailangan mong gumamit ng anumang mga guhit mula sa programa ng CAD. Pagkatapos, gamit ang CAM program, ang code ng G ay nabuo.Para sa mga layuning ito, maginhawang gamitin ang programang MasterCam X7. Mayroon itong parehong CAD at CAM.