


Ngunit una, alamin natin kung ano ito at kung bakit kinakailangan ito. Sa katunayan, ang pangalan nito ay nagsasabi sa atin ng layunin nito. Ito ay nabuo mula sa salitang Latin na curvus, na nangangahulugang curved o kulot. Iyon ay, ang isang kurbada ay isang gulong o meter na distansya ng gulong. Ang dalawang uri ng mga curvimeter ay nakikilala: maliit (cartographic), na karaniwang ginagamit para sa mga sukat sa mapa, at malaki (kalsada), na kadalasang ginagamit upang masukat ang haba ng mga hubog na mga seksyon ng mga daanan na daan. Maaari silang magamit kahit saan ito ay abala o imposible upang masukat gamit ang karaniwang roulette, samakatuwid ang proyekto ay nangangako na maging kawili-wili.
Ang unang bagay na dapat alagaan kapag ang pagbuo ng curvimeter ay isang gulong o roller. Dapat itong maliit na maliit upang ang katumpakan ng instrumento ay mataas, sa parehong oras dapat itong sapat na malaki upang ang halaga ng mga pagbasa ay hindi lubos na naapektuhan ng hindi pagkakapantay-pantay ng sinusukat na ibabaw. Sa aking kaso, ang gulong ay may diameter na 14 sentimetro.

Ngayon kailangan mong matukoy ang materyal at sukat ng istraktura. Gumamit ako ng isang puno.

Sa mga bar ay gumawa ako ng pagmamarka at ginawa ang mga kinakailangang pagbawas at butas.

Pagkatapos ay tinipon ko ang mga makinang mga bahagi gamit ang maliit na self-tapping screws.
Ngayon maghukay tayo nang kaunti mula sa curvimeter mismo at isipin kung paano ang bagay na ito ay maaaring matukoy ang distansya? Ang lahat ay medyo simple. Kailangan lang nating kalkulahin ang bilang ng mga rebolusyon ng gulong at dumami sa haba ng panlabas nitong sirkulasyon, at mas madali itong magdagdag ng isang haba ng halaga sa bawat oras na ang gulong ay gumawa ng isa pang rebolusyon.
Upang mabilang ang bawat rebolusyon sa pinakasimpleng kaso, maaari mong gamitin ang "sliding contact". Gayunpaman, hindi ko inirerekumenda ang paggamit ng naturang mekanismo ng sanggunian. Mas mahusay na gumamit ng reed switch o isang sensor ng Hall.
Panahon na upang subukan sa isang gulong. I-fasten ko ito ng mahabang bolt. Nakakahanap kami ng isang lugar sa frame kung saan ang wheel rim ay malapit na hangga't maaari at markahan na may mga stroke. Sa paligid ng lugar na ito, dapat nating i-install ang switch ng tambo.

Sa gulong kailangan mong mag-install ng isang maliit na magnet.Tiyaking ang kanyang lakas ay sapat upang isara ang mga contact ng reed switch.
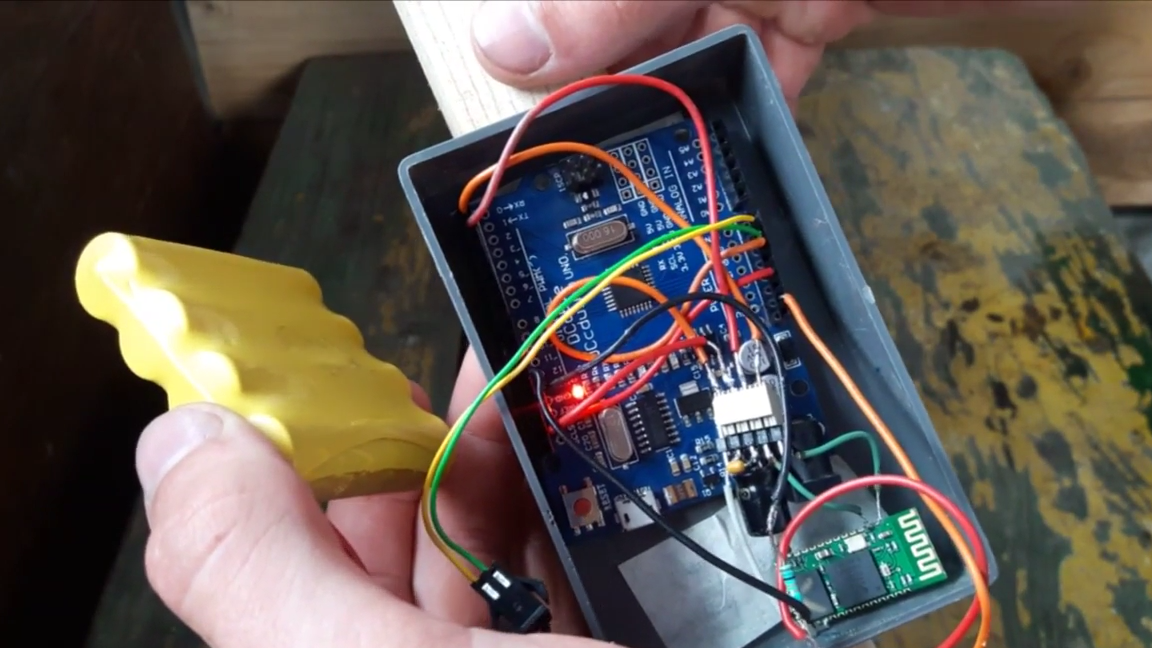
Ngayon kami ay makikibahagi sa "talino" ng system. Sa aking kaso, ito ay isang bayad Arduino UNO. Babasahin nito ang katayuan ng reed switch at magpadala ng data sa pamamagitan ng koneksyon sa Bluetooth, gamit ang HC-05 module, sa telepono. Sa pamamagitan ng paraan, ang switch ng tambo ay konektado sa board tulad ng isang regular na pindutan. Sa palagay ko ay hindi dapat magkaroon ng anumang mga problema sa pagkonekta sa module ng Bluetooth.
Tulad ng para sa code mismo, napaka-simple. At sinubukan kong magkomento tungkol dito upang ang lahat ay malinaw hangga't maaari.
int gercon = 12; // konektado ang tambo ng switch sa 12 pin
dobleng distansya = 0; // lumikha ng isang dobleng variable upang maimbak ang distansya
walang pag-setup () {
Serial.begin (9600); // konektado ang isang serye na koneksyon
}
walang bisa na loop () {
/ * Susunod ay kung ang loop. Kung ang switch ng tambo ay sarado, pagkatapos maganap ang susunod na pagkalkula ng distansya. Ang halaga ng 0.46472 ay na ang kinakalkula na haba ng isang rebolusyon ng gulong. Upang maiwasan ang "dagdag" na data, magdagdag ng pagkaantala ng 200 millisecond at ipakita ang mga pagbasa
* /
kung (digitalRead (gercon) == HIGH)
{
distansya = distansya + 0.46472;
pagkaantala (200);
Serial.println (distansya);
}
} 
Narito ang aming curvimeter at handa na!
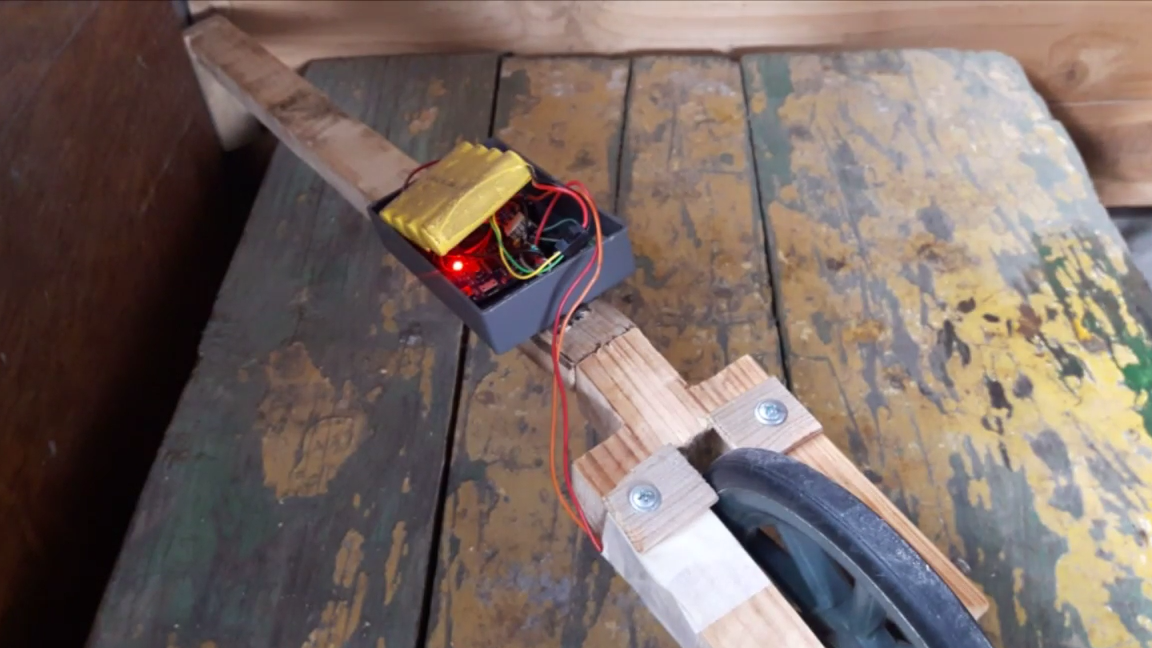
Gumawa tayo ng ilang mga karera sa pagsubok. Lahat gumagana mahusay!

Maaari kang manood ng isang video sa pagpupulong ng aparatong ito, marahil ay may makikita kang kagiliw-giliw na bagay.
[media = https: //youtu.be/kx_7ztPsLws]
Magkaroon ng isang mahusay na ulitin ang proyekto!