

Isasaalang-alang ng artikulo ang isang halimbawa ng paglikha ng isang maalamat na robot na tinatawag na "Canbot". Ang karamihan sa mga detalye para sa robot ay naka-print sa isang 3D printer. Ang robot ay kinokontrol nang malayuan.
Mga materyales at tool para sa gawang bahay:
- Isang Atmel Attiny85 microcontroller;
- dalawang microservices HXT900 o ang kanilang mga analogue;
- isang 3.7V LiPo baterya;
- isang tatanggap ng infrared sa 38kHz;
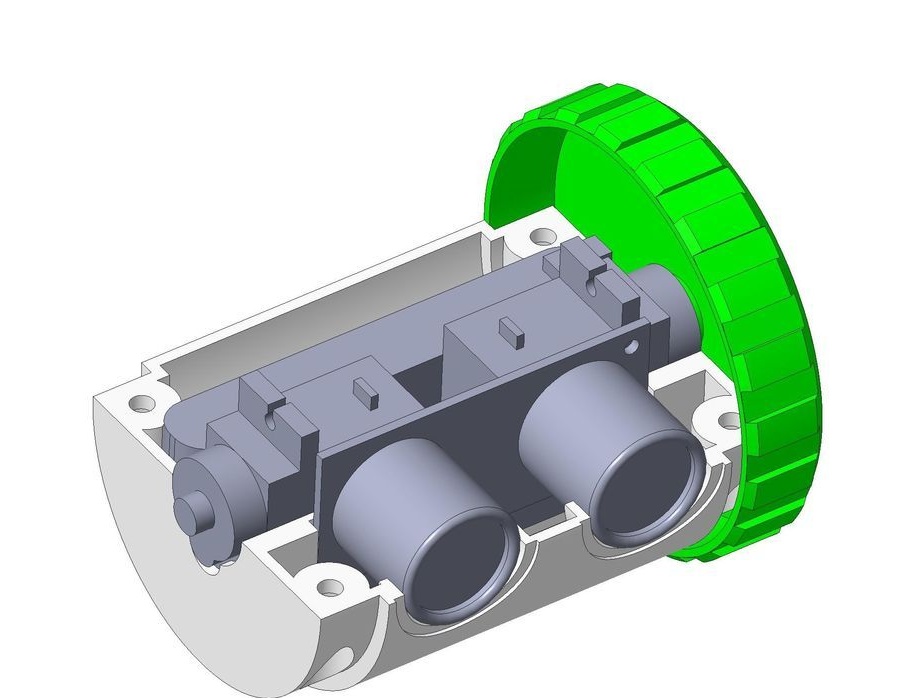
- Uri ng ultrasonic transducer HC-SR04;
- 9x4mm switch o jumper sa halip;
- Mga bahagi ng 3D (posible). Dadalhin ang isang tuktok (tuktok.stl), isang ibaba (ibaba.stl) at dalawang gulong (wheel.stl).
Siyempre, kakailanganin ang mga kagamitan sa paghihinang, mainit na pandikit, mga distorner, turnilyo, mga wire at iba pang maliliit na bagay.

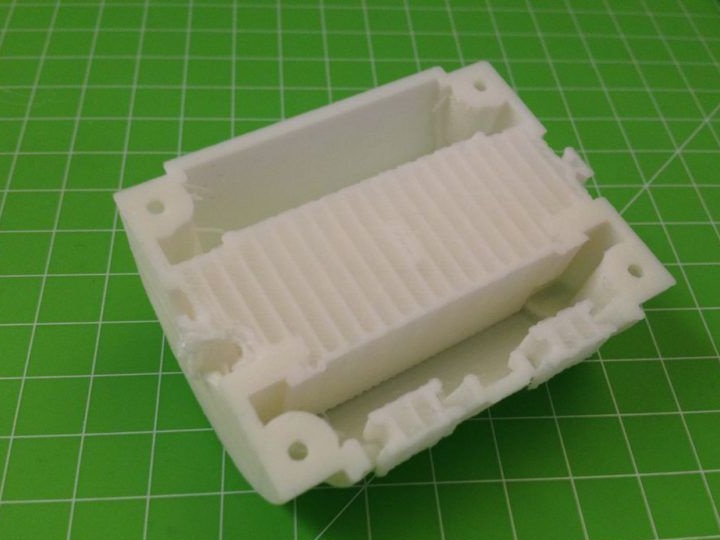
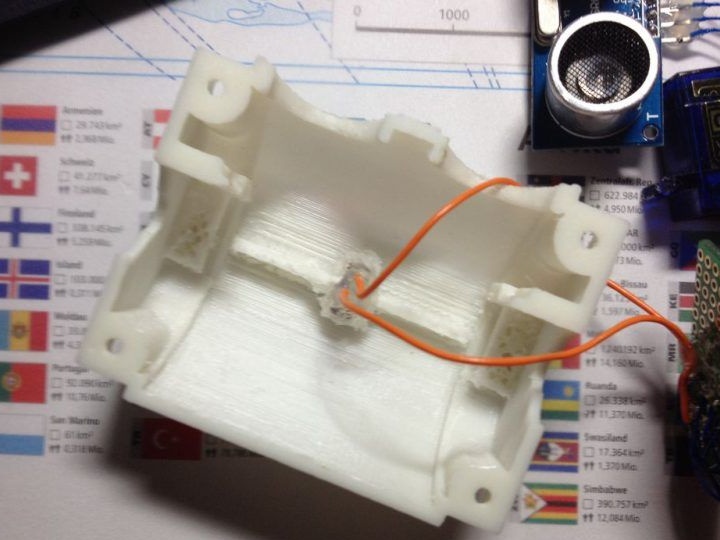
Ang mga tuktok at ilalim na bahagi ay kailangang mai-print na flat side down gamit ang pagpipilian na "mga istruktura ng suporta" Depende sa kung anong uri ng printer ang ginamit, ang mga natapos na bahagi ay maaaring kailangang malinis sa dulo.
Ang proseso ng pagmamanupaktura ng robot:
Unang hakbang. Electronic bahagi ng robot
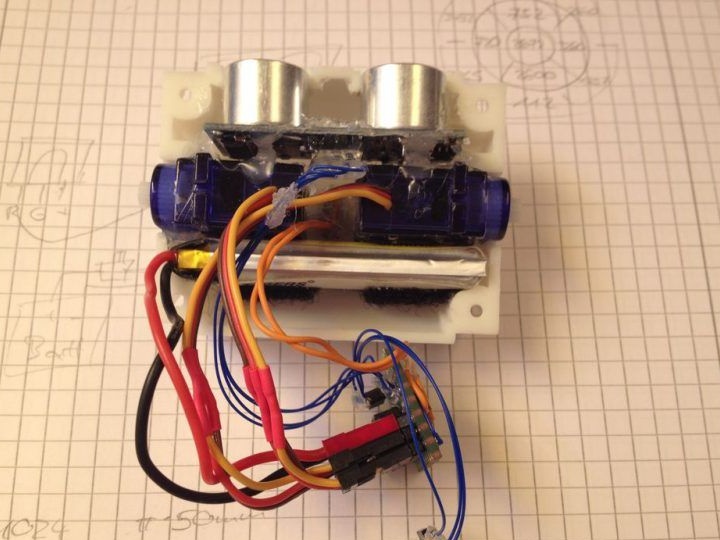
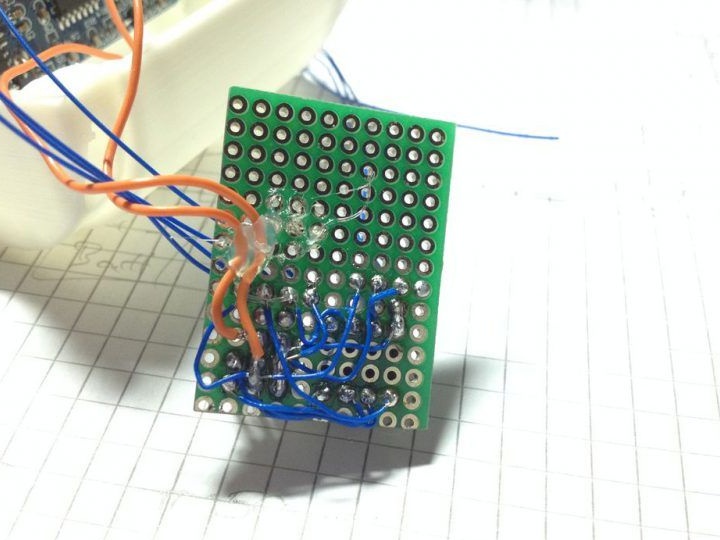
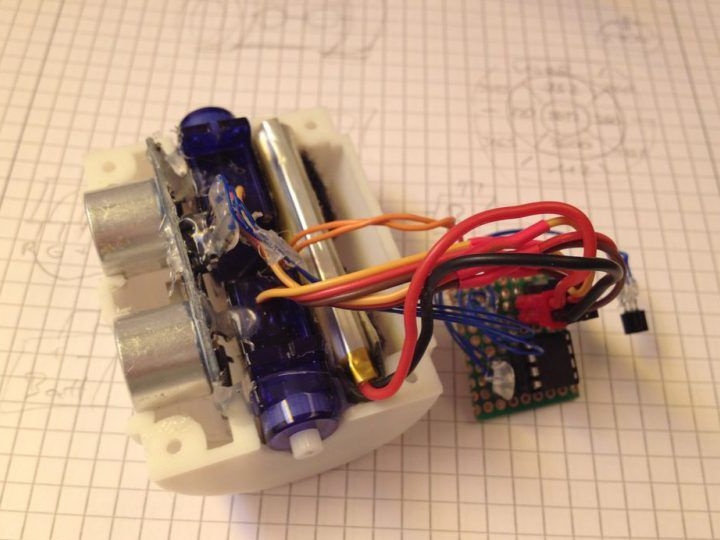
Una kailangan mong i-configure ang mga servo, kailangan nilang ma-convert sa patuloy na pag-ikot. Paano ito gawin, may mga toneladang tagubilin sa Internet. Kaya, kung gayon ang lahat ng mga elektronikong elemento ay kailangang tipunin tulad ng ipinahiwatig sa diagram. Upang tipunin ang elektronikong bahagi ay maginhawa, maaari kang kumuha ng isang maliit na piraso ng isang tinapay, pati na rin ang manipis na mga wire.


Hakbang Dalawang Ang bahagi ng software ng robot
Kung lalapit ka sa proseso ng paglikha ng isang robot na may pinakamataas na propesyonalismo, kung gayon ang bahagi ng software ay maaaring maisulat nang nakapag-iisa. Ngunit para dito kailangan mong malaman ang isang wikang programming. Sa isang mas simpleng bersyon, maaari mong i-download ang yari na code at i-upload lamang ito sa microcontroller.
Ayon sa may-akda, ang pinakamahusay ang robot Tumatanggap ng mga infrared signal mula sa mga remote control ng brand ng Sony. Sa hinaharap, kinakailangan na "sumalamin" ang bahagi ng code Arduino at output ang data sa pamamagitan ng Serial.print () function. Bilang isang resulta, posible upang malaman kung ano ang pag-encode sa bawat pindutan.
Hakbang Tatlong Ang huling yugto. Pangkatin ang robot
Kaya, sa konklusyon, ang robot ay pupunta. Para sa mga layuning ito, kakailanganin mo ng mainit na pandikit. Gamit ito, kailangan mong ayusin ang mga wire upang hindi sila bumaba kapag gumagalaw ang robot.Kinakailangan din upang ayusin ang switch at ayusin nang maayos ang ultrasonic sensor. Sa konklusyon, ang mga takip ng robot ay konektado gamit ang apat na mga tornilyo, bilang isang resulta, kung kinakailangan, madali itong ma-disassembled. Sa pamamagitan ng paraan, ang mga turnilyo para sa mga servo ay perpekto para sa pag-mount.

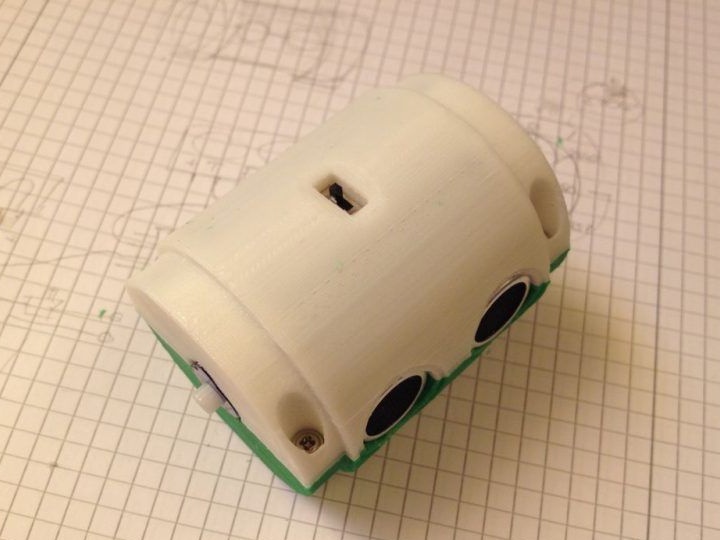
Iyon lang, ngayon ang robot ay halos handa na. Ito ay nananatiling i-install ang mga gulong sa servomotor shaft at maaari mong simulan ang pagsubok sa robot. Maaari mong makita nang mas detalyado kung paano gumagana ang homemade sa video.