

Video ng trabaho sa Robot
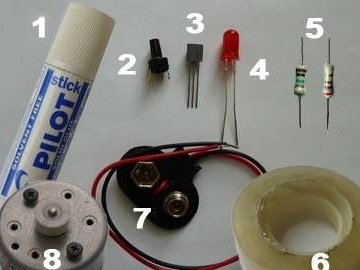
Mga materyales at tool para sa paglikha ng isang robot:
- tuyong pandikit;
- transparent tape;
- Dalawang hindi pin naayos na pindutan;
- isang kumikislap na uri ng LED ARL-513URC-B;
- uri ng transistor na KP505A;
- dalawang resistors na may nominal na halaga ng 1M at 270 Ohms;
- clip-connector para sa pagkonekta sa isang baterya ng uri ng "Crown";
- modelo ng motor RF-300CA-D / C 3V o pareho.

Pag-andar at katangian ng robot:
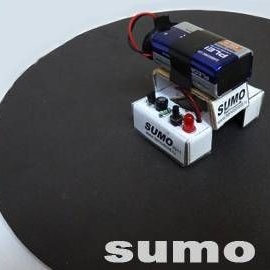
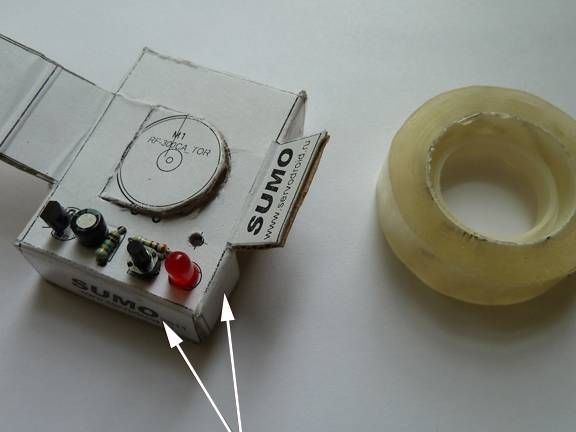
Sa larawan maaari mong makita na natipon ang robot. Upang ilipat ang aparato, isang motor lang ang ginagamit, naka-install ito nang patayo, ngunit sa isang tiyak na anggulo. Kapag lumipat sa isang maikling segment, ang robot ay gumagalaw sa isang tuwid na linya, at gumagawa ng isang arko sa isang mas mahabang seksyon.
Ang isang pindutan ay ginagamit upang i-on ang robot; kapag pinindot ito, ang robot ay lumiliko sa loob ng 20 segundo. Pagkatapos nito, nangyayari ang isang awtomatikong pagsara, at ang robot ay nasa standby mode hanggang sa susunod na pag-activate.
Ang isa pang tampok ng robot ay awtomatikong humihinto ito sa gilid ng singsing. Ang katuparan ng kundisyong ito ay posible kung ang bigat ng kalaban ay hindi bababa sa bigat ng robot, at ang kapal ng singsing ay hindi bababa sa 3 mm.
Dito, ang isang 9 Volt baterya ay ginagamit bilang isang mapagkukunan ng kuryente, naka-mount ito sa tuktok ng robot. Salamat sa karagdagang timbang, naipon ng robot ang kinakailangang enerhiya ng kinetic para sa mga kinakailangang aksyon.
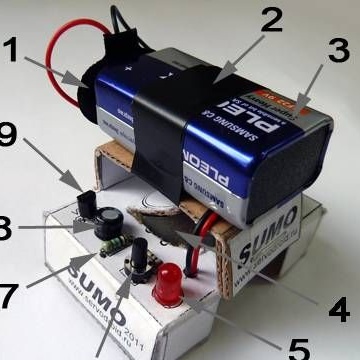
Sa larawan, ang mga bahagi ng robot ay minarkahan ng mga numero:
1. Clip para sa pagkonekta ng baterya.
2. Layer ng baterya.
3. Power supply (9 V baterya).
4. Ang makina.
5. Flashing LED (nagpapahiwatig na ang kapangyarihan ay konektado).
6. Pindutan upang i-on ang robot.
7. Resistor, salamat dito maaari mong itakda ang oras ng robot.
8. Capacitor, siya rin ang may pananagutan sa oras ng robot.
9. Transistor type KP505A, ito ay isang driver ng motor.
Proseso ng pagpupulong ng Robot:
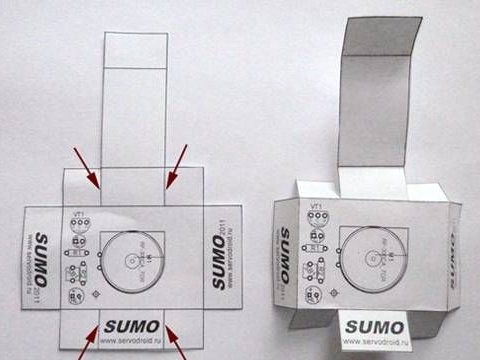
Unang hakbang. Ginagawa namin ang kaso
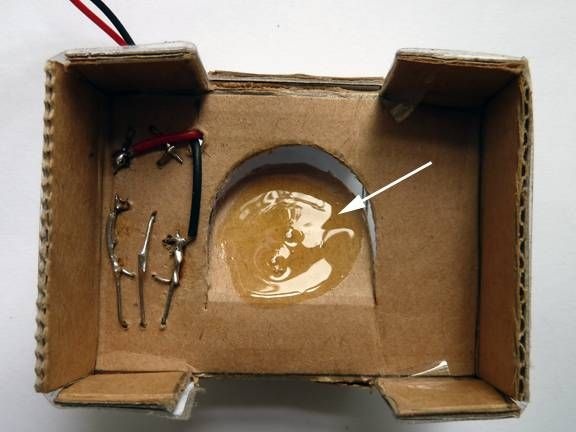
Upang gawin ang kaso, ang may-akda ay gumagamit ng corrugated cardboard, kailangan mong mag-apply ng isang contour ayon dito ayon sa template. Ang template ay maaaring mai-print sa isang printer, naka-attach ito sa artikulo. Karagdagan, pagkatapos gawin ang mga kinakailangang folds, ang pattern ay maaaring i-cut kasama ang mga makapal na linya. Upang mai-install ang engine, kailangan mong i-cut ang isang kalahating bilog sa karton, at pagkatapos ay yumuko ito nang kaunti, tulad ng ipinahiwatig sa larawan.


Hakbang Dalawang Pag-install ng mga elemento ng radyo
Sa susunod na yugto, kailangan mong i-install ang lahat ng kinakailangang mga elemento ng radyo. Upang gawin ito, kailangan mong kumuha ng awl at gumawa ng mga butas sa karton, kailangan nilang gawin sa mga bilog na marka. Upang ayusin ang mga sangkap, pagkatapos ng pag-install, ang kanilang mga konklusyon ay kailangang bahagyang baluktot. Maaari mo ring makita ang marka sa anyo ng isang paningin sa karton, narito kailangan mong gumawa ng isang malaking butas, isang power wire ang dadaan dito.
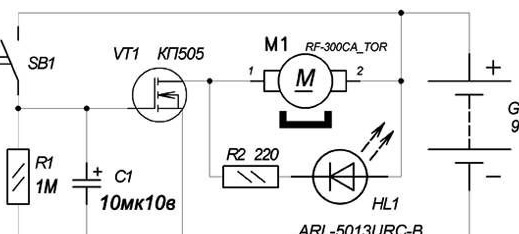
Pagkatapos nito, maaari kang kumuha ng isang paghihinang bakal at simulan ang pagkonekta sa mga contact ng mga elemento ng radyo alinsunod sa scheme.





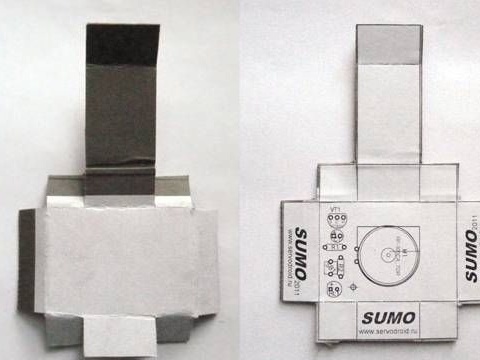
Hakbang Tatlong Inaayos namin ang mas mababang mga ibabaw ng gilid
Sa yugtong ito, ang mga ibabang bahagi ay maaaring sumali. Upang gawin ito, kailangan mong yumuko ang mas mababang mga eroplano at pagkatapos ay ayusin ang mga ito gamit ang transparent tape. Gayundin sa larawan maaari mong makita ang mga elemento ng kaso na tumagilid, kinakailangan upang ayusin ang baterya.


Hakbang Apat Ikonekta ang mga peripheral
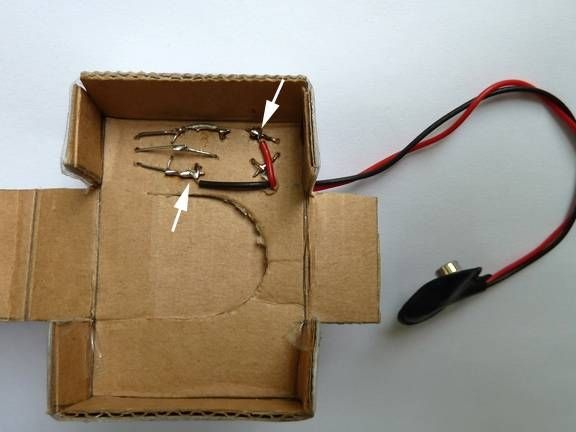
Upang ikonekta ang kapangyarihan sa baterya, kailangan mong gumamit ng isang konektor ng clip. Ang wire ay kailangang maipasa sa pamamagitan ng butas, ang pula ay soldered sa positibong contact ng LED, at itim sa minus ng capacitor C1.
Pagkatapos ay kailangan mong ikonekta ang kaliwa at kanang bahagi ng ibabaw, bilang isang resulta, ang titik na "P" ay dapat makuha. Para sa maaasahang pag-aayos ng mga elemento, ginagamit ang isang bracket mula sa stapler. Kung saan i-install ang mga bracket ay ipinahiwatig ng isang puting arrow. Ang mga clamp ay maaaring mai-clamp sa mga plier.


Hakbang Limang I-install at ikonekta ang makina
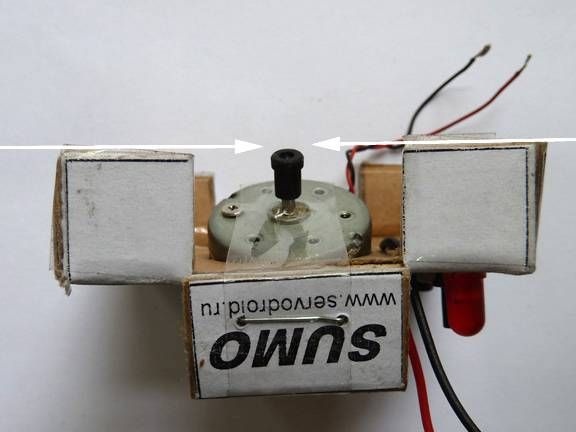
Para sa robot na ilipat tuwid, ang baras nito ay dapat na sa isang tiyak na anggulo sa ibabaw. Sa madaling salita, ang robot ay tatayo sa mga bahagi, at ang baras nito ay makikipag-ugnay lamang sa ibabaw. Upang ang baras ng robot ay magkaroon ng isang mahusay na mahigpit na pagkakahawak, kailangan mong ilagay sa isang nababanat na banda, maaari itong maging isang cambric o isang goma retainer mula sa isang helium pen.
Ang motor ay naka-mount sa pandikit, ang lugar ng pagpapadulas ay minarkahan ng isang puting arrow. Pagkatapos mag-apply sa pandikit, kailangan mong maghintay ng kaunti para sa ito upang maging malapot, kung hindi man ay maaaring makuha ang likidong pandikit sa makina at masira ito.
Para sa karagdagang pag-aayos, ang motor ay balot ng tape.


Tulad ng para sa anggulo ng robot, kung gayon ang lahat ng ito ay malinaw na nakikita sa mga larawan. Pagkatapos ng pag-install, ang motor ay kailangang konektado. Ang isang pin ay konektado sa minus, at ang iba pa sa kanal ng transistor VT1.


Hakbang Anim Ang huling yugto ng pagpupulong
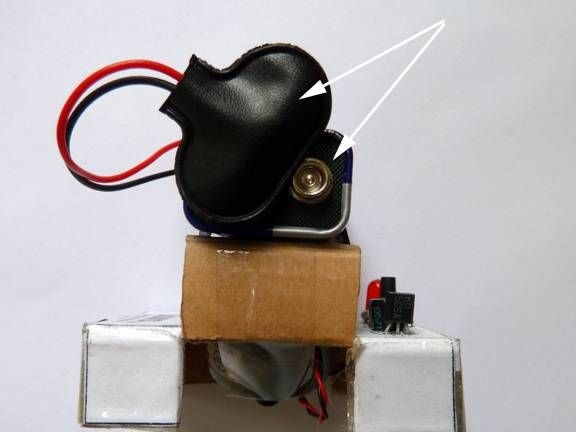
Ang baterya ay naka-mount sa isang hugis ng U-frame, ang baterya ay naayos gamit ang electrical tape. Ang frame ay naisip sa isang paraan na, bilang karagdagan sa suporta, ito rin ay isang shock absorber para sa baterya. Kung ang robot ay kailangang ganap na mai-disconnect mula sa power supply, maaari mong idiskonekta ang isang wire mula sa baterya.
Kaya, sa konklusyon, para sa kumpetisyon kakailanganin mo ang isang singsing, ito ay ginawa ng dalawang-layer, na may kapal na hindi bababa sa 3 mm. Kung hindi nakamit ang kondisyong ito, ang robot ay hindi maaaring tumigil sa gilid ng singsing. Ang diameter ng singsing ay dapat na 250 mm. Ang ibabang layer ay binubuo ng isang manipis na corrugated karton, at ang itaas ng isa sa itim na manipis na karton. Ang parehong mga layer ay kailangang nakadikit nang magkasama. Tapos na ang pagpupulong, maaari mong simulan ang kumpetisyon. Ang nagwagi ay ang robot na nananatili sa ring.