Ngayon nais kong ibahagi ang aking susunod gawang bahay. Ito ay batay sa Lego at Arduino. Para sa kontrol, gagamitin namin ang isang remote control na may isang 433 MHz transmitter. Sa oras na ito nais kong gumawa ng karera isang kotse. Magpatuloy
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- 433 module ng komunikasyon sa radyo MHz
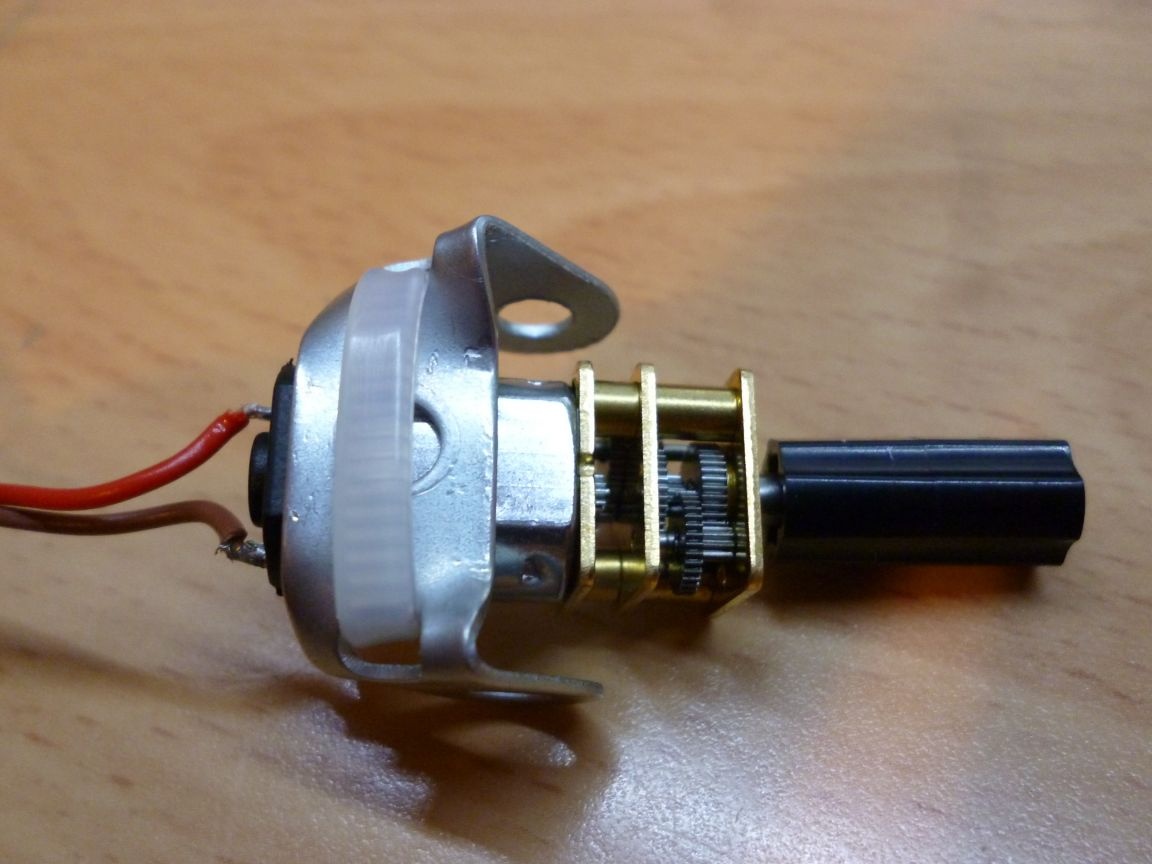
- Motor reducer 200 rpm, na may diameter ng baras ng 3 mm
- 2 LEDs
- 2 resistors 150 ohms
- Capacitor 10v 1000uF
- 2 solong hilera ang sumali sa PLS-40
- 2 mga konektor ng PBS-20
- Inductor 68mkGn
- 6 na baterya NI-Mn 1.2v 1000mA
- Konektor ng tatay-nanay ng dalawang pin sa kawad
- Homutik
- Mga wire ng iba't ibang kulay
- nagbebenta
- Rosin
- paghihinang bakal
- Bolts 3x40 at nuts at tagapaghugas para sa kanila
- Bolts 3x20
Hakbang 1 tipunin ang kaso.
Kinakailangan na i-ipon ang aming makina ayon sa mga tagubilin sa Lego 42022 ang pangalawang pagpipilian na may ilang pagpipino. Ginagawa namin ang lahat ng mga aksyon mula sa pahina 3 hanggang 6. Hindi namin kailangan ng mekanismo ng gear. Ang engine ng Lego ay hindi rin kailangang tipunin. Gayunpaman, kakailanganin mo ang mga mounts ng engine na nakolekta sa mga pahina 14-19, maliban sa mga gears at shaft. Susunod, kinokolekta namin ang lahat mula sa mga pahina 20 hanggang 74, maliban sa pingga sa pahina 25.
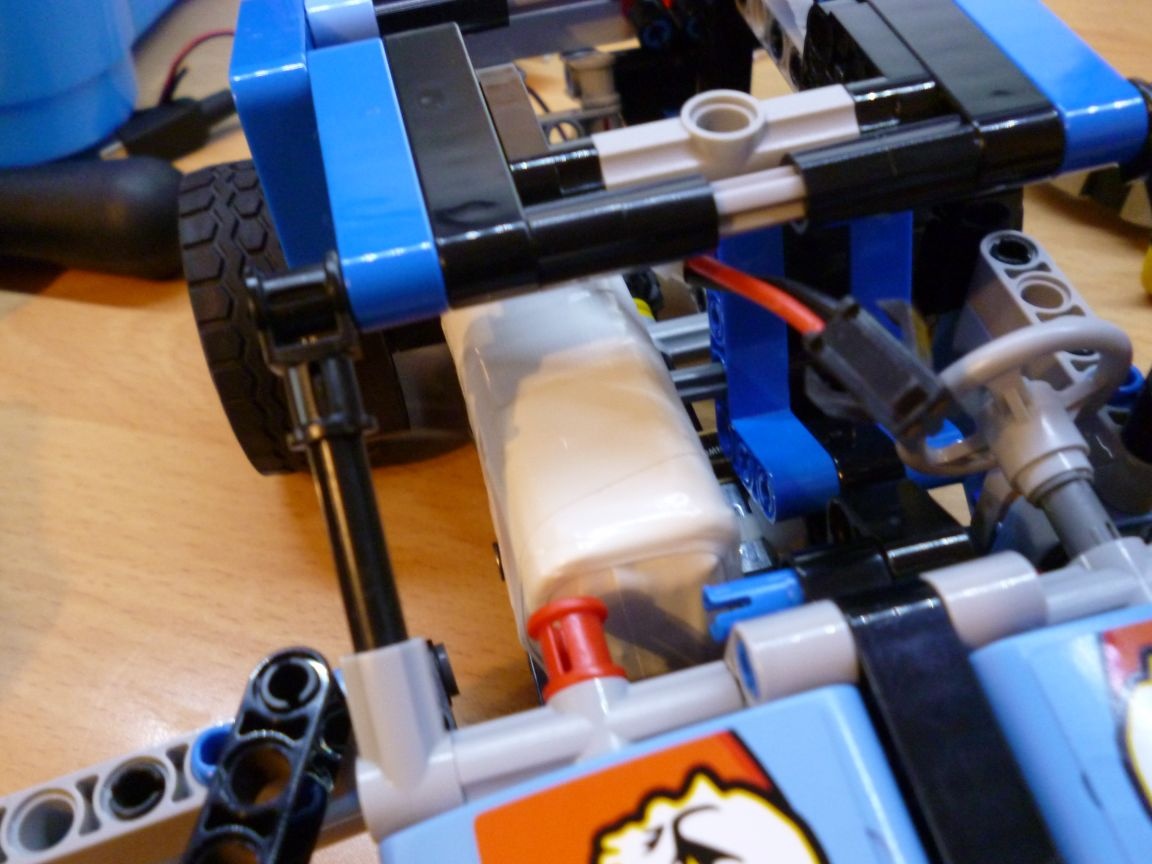
Ang mekanismo ng Hakbang 2 ay pinapagana ang katawan.
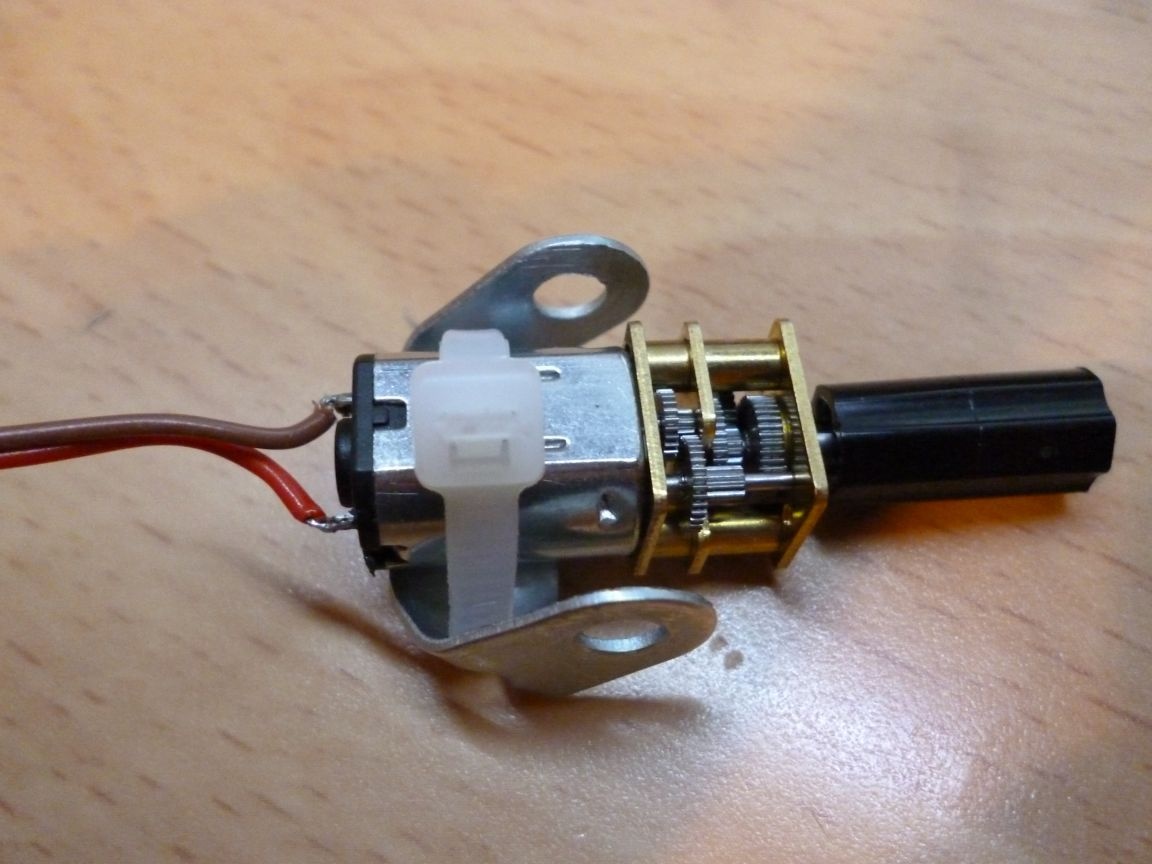
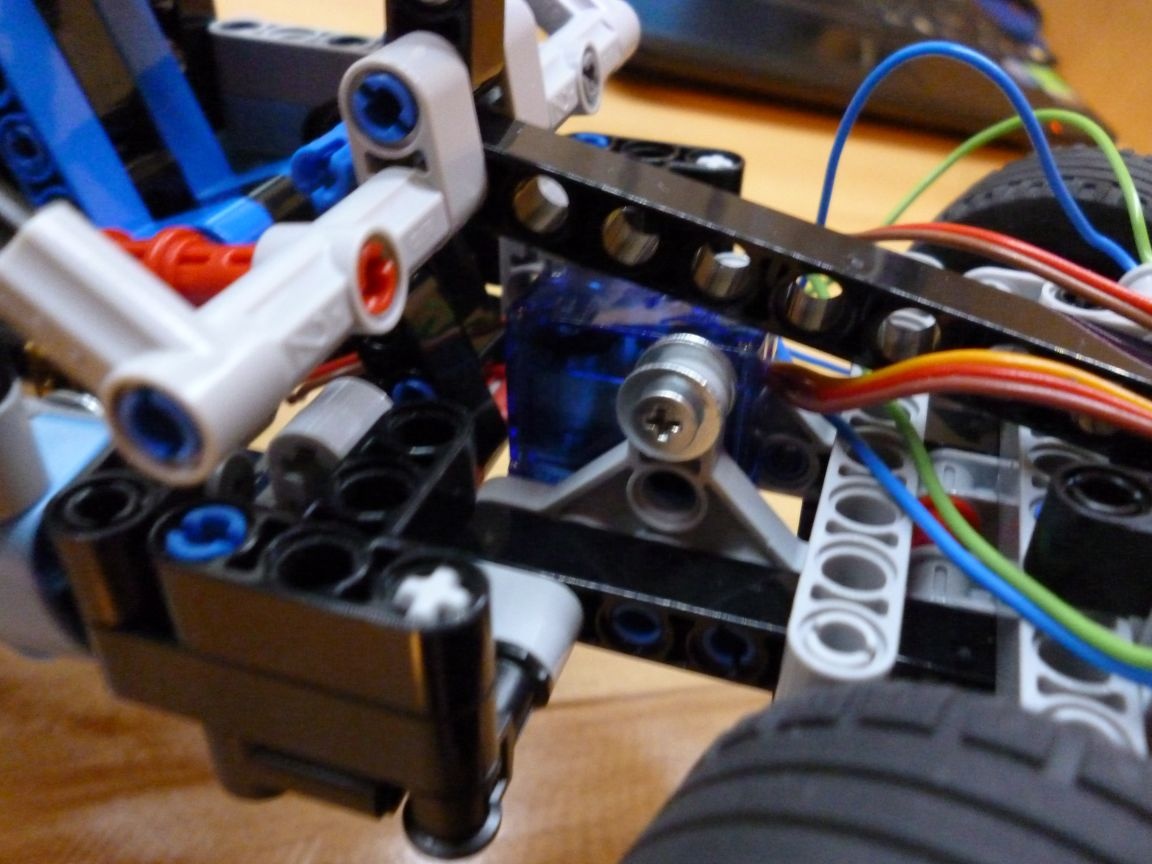
Itakda sa paggalaw ng aming ang modelo magkakaroon ng gear motor na may bilis na 200 rpm. Maaaring magamit gamit ang ibang ratio ng gear. Ngunit, sa aking opinyon, ito ang pinakamahusay na pagpipilian. Sa 100 rpm - masyadong mabagal, 300 rpm - walang sapat na lakas at ang engine ay sobrang init. Sa baras ng gearmotor, dapat mong ilagay ang "Legovskiy" na kumonekta ng manggas at mai-secure ito laban sa pag-takbo ng isang tugma. Upang ayusin ang aming motor sa modelo, kinakailangan upang ibaluktot ang bahagi mula sa metal na tagabuo ng titik na "P" at ikabit ang motor motor sa plato na may isang salansan. Ang resulta ay dapat na sumusunod:
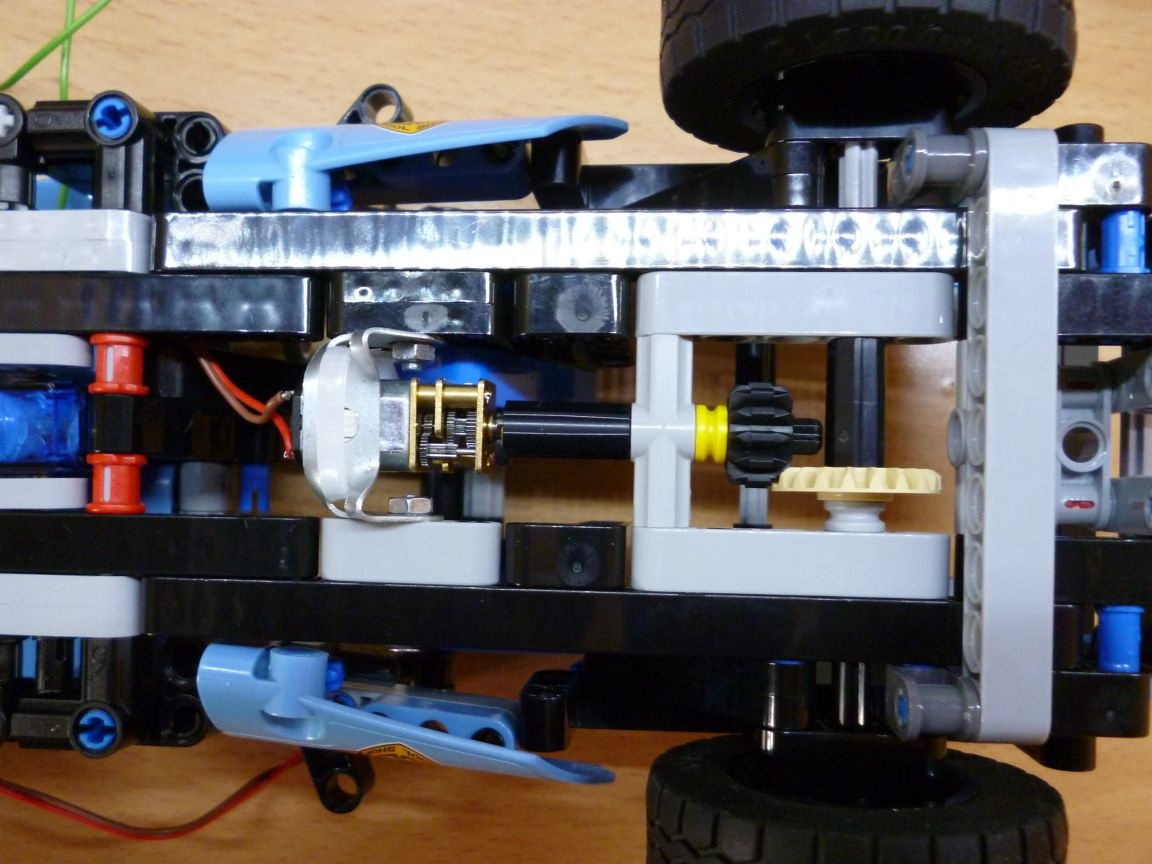
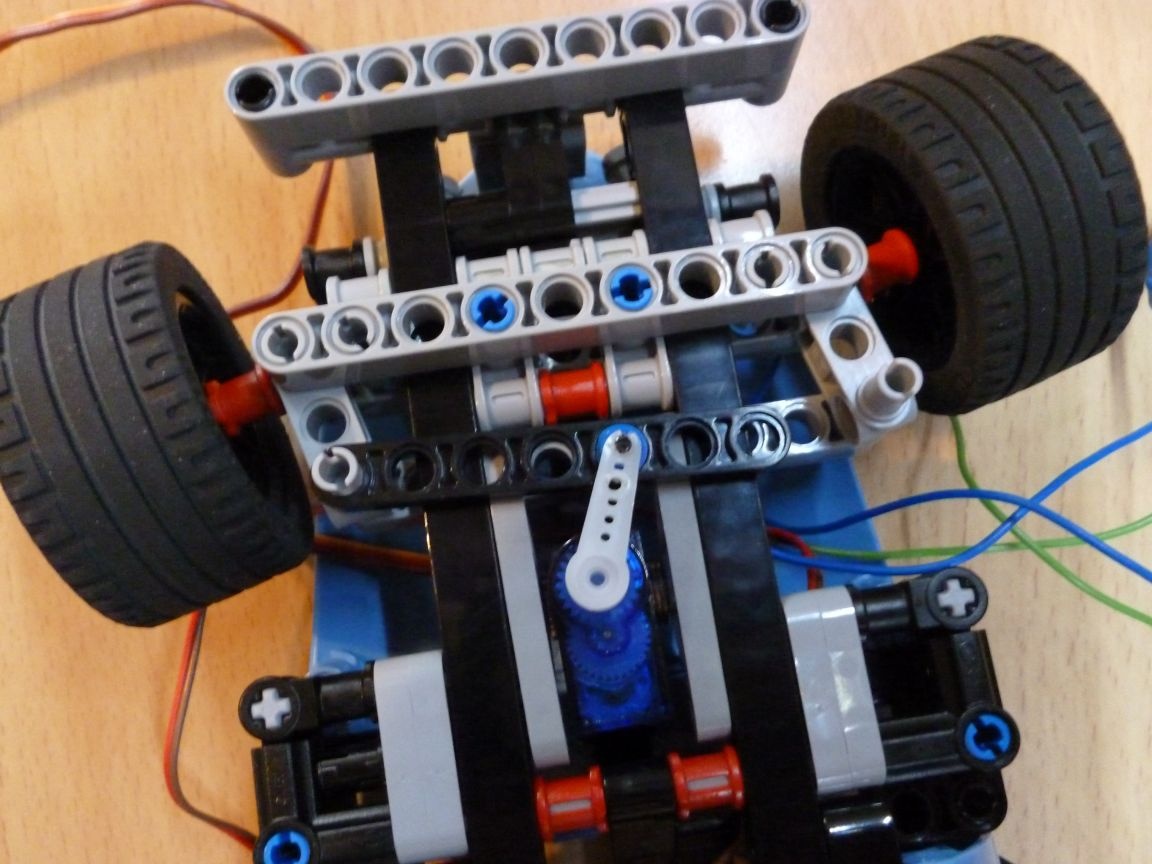
Sa tulong ng 3x20 bolts ay pinasasan namin ang aming motor sa modelo. Huwag higpitan ng sobra! Kung hindi, maaari mong masira ang mga bahagi ng tagapagtayo ng Lego. Sa modelo, ganito ang hitsura nito:
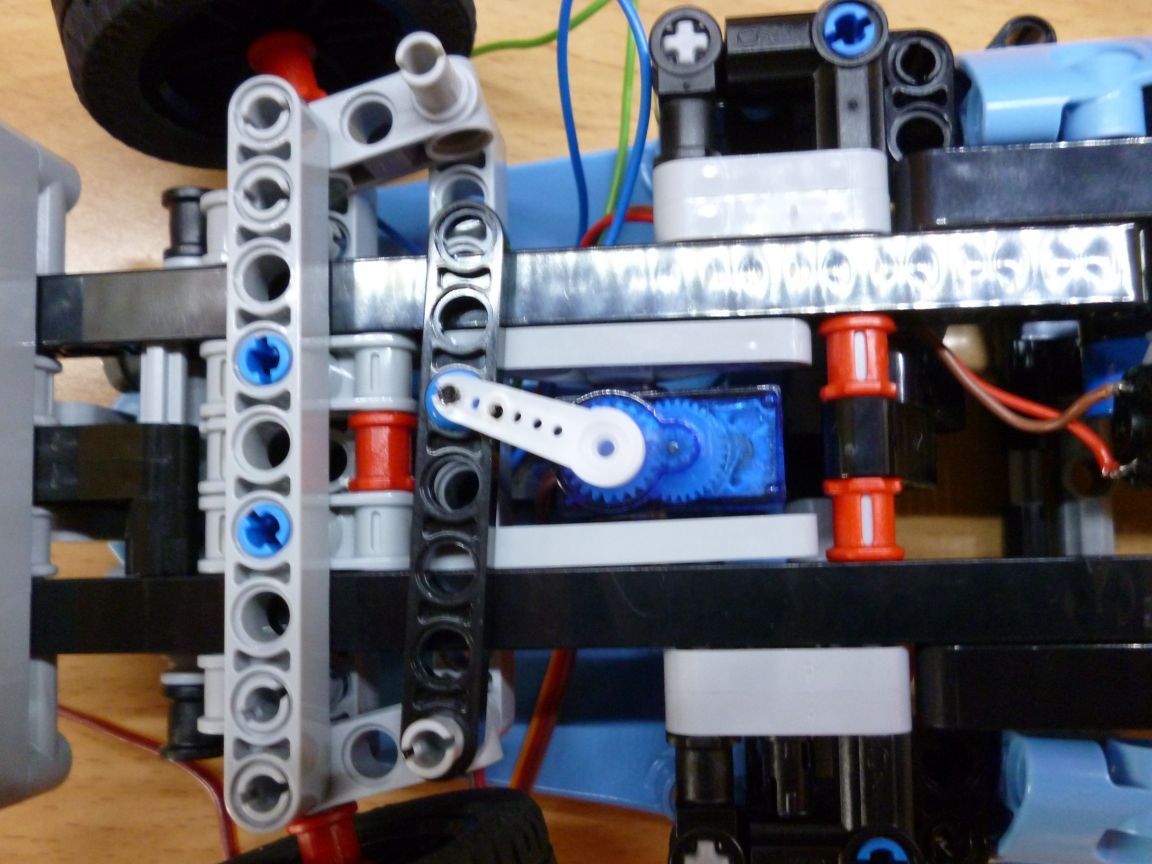
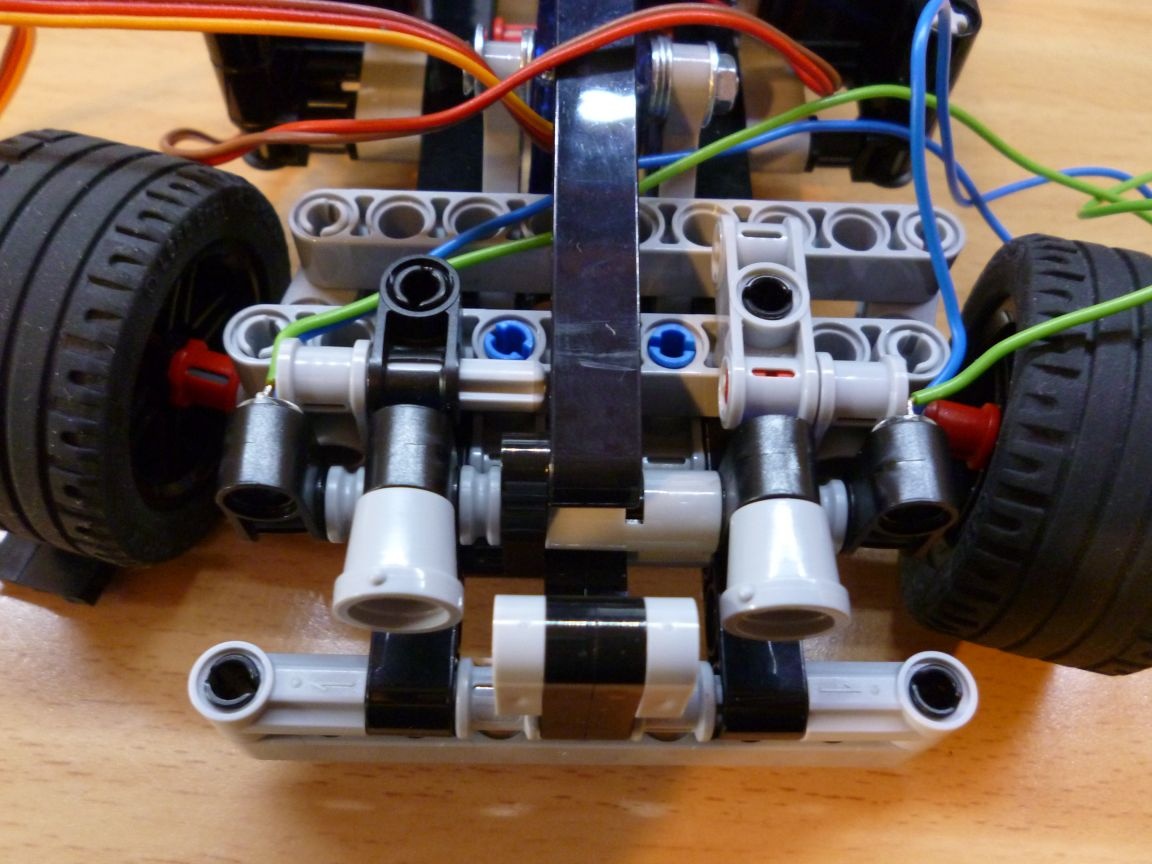
Upang gumawa ng pagliko, kumuha ng isang bahagyang nabago servo SG-90. Ang kaso ay dapat na maingat na drilled upang hindi hawakan ang mga panloob na bahagi, sa pamamagitan ng butas na may diameter na 3.2 mm o simpleng gupitin gamit ang isang headery na kutsilyo.

Nagpasok kami ng isang bolt sa butas na ginawa, at sa mga gilid na inilalagay namin sa tatsulok na mga plato at ayusin ang mga nuts. Inilalagay namin ang pingga sa baras ng servo at itabi ang bahagi sa pingga ng Lego. Sa isang makinilya, ganito ang hitsura:
Ang Hakbang 3 ay isang elektrisyan.
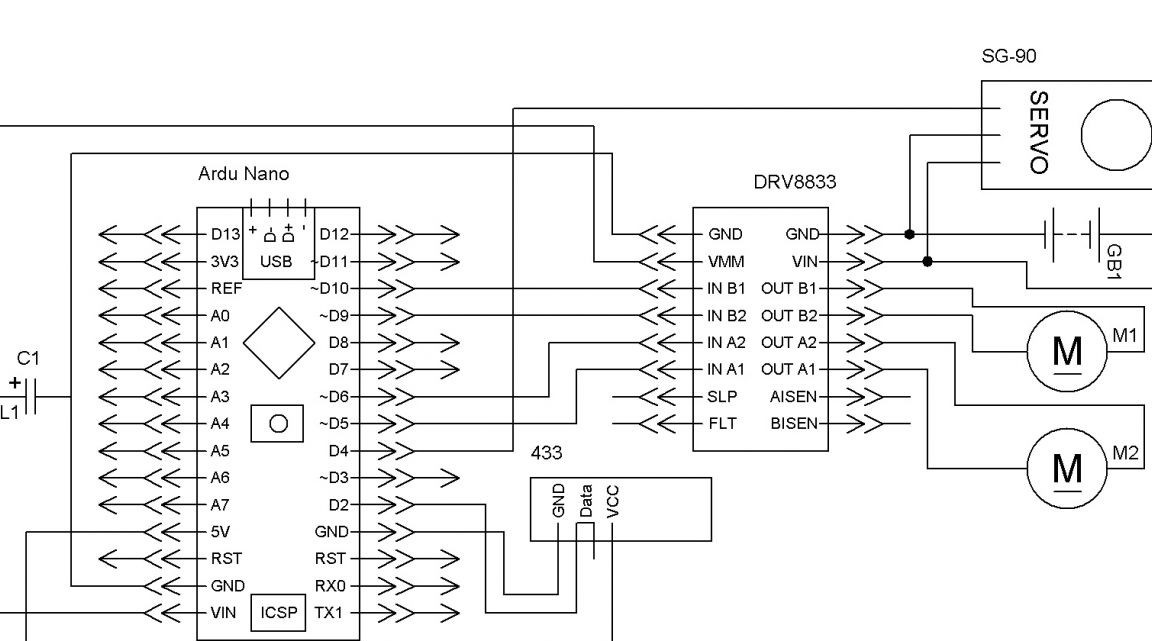
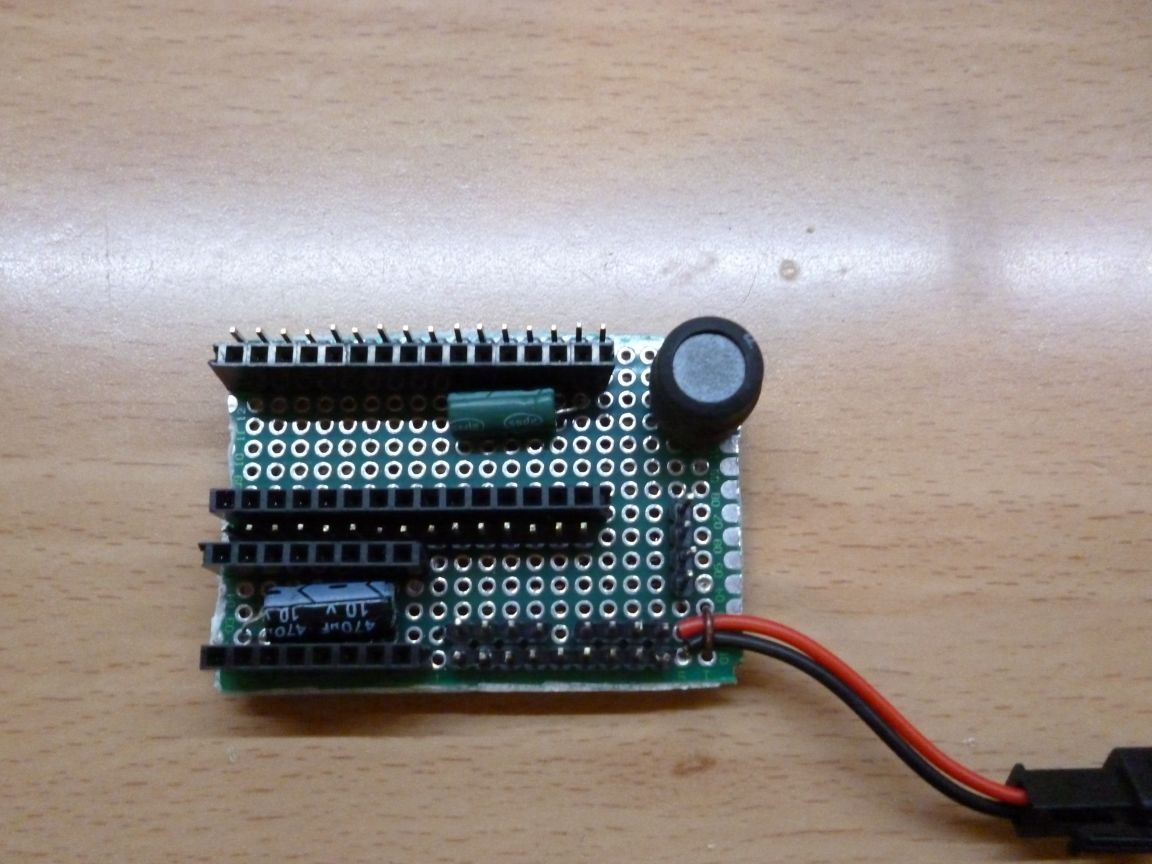
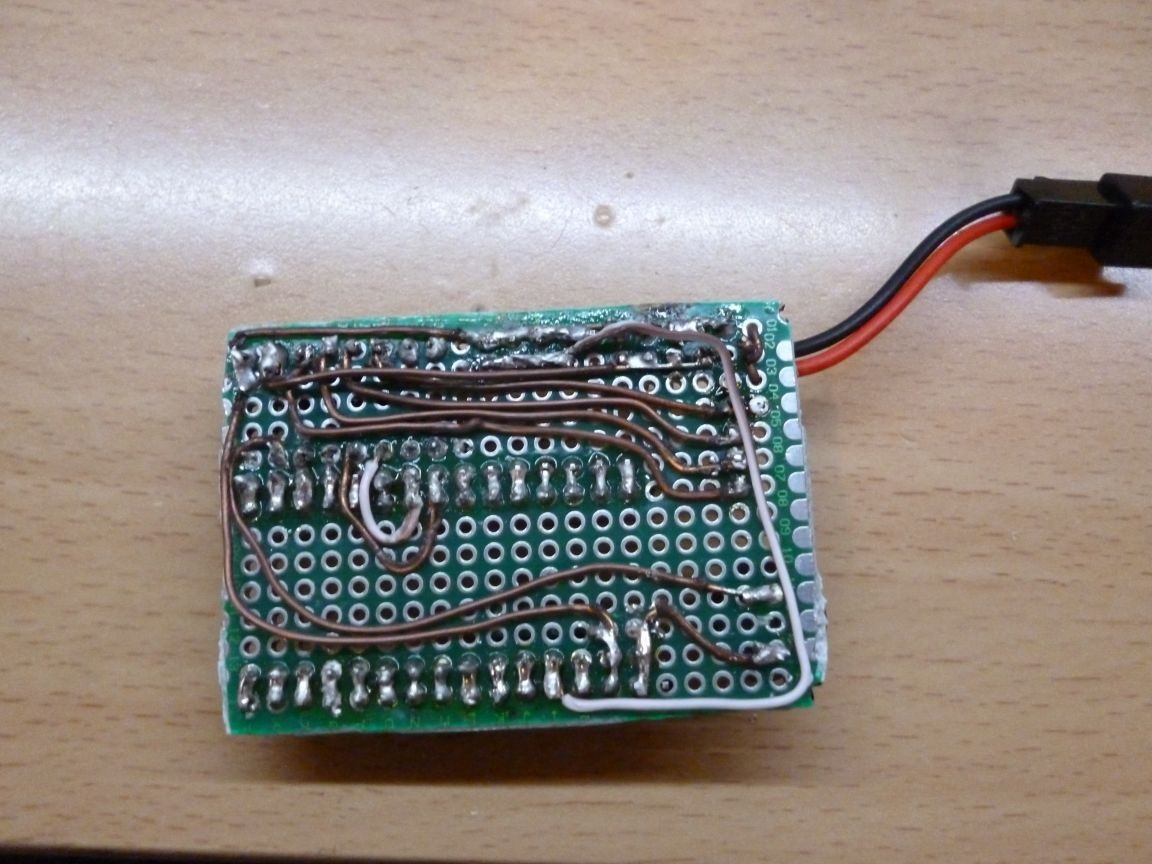
Soldering iron sa kamay at pumunta. Ang lahat ng mga electrics ay maaaring tipunin sa pamamagitan lamang ng pagkonekta sa mga mounting wires. Ngunit hindi ito maginhawa, dahil nangangailangan ito ng maraming espasyo. Bilang karagdagan, mayroong isang mataas na posibilidad ng hindi magandang kalidad na contact. Samakatuwid, mas mahusay na ibenta ang lahat sa circuit board ayon sa sumusunod na pamamaraan:
Magdadala ako ng isang maliit na kalinawan: maaari kang kumuha ng anumang mababang kapasidad ng kapasidad, maaari ka ring makahanap ng isang inductor ng anumang uri, ito ay kinakailangan upang patatagin ang boltahe ng microcontroller. Ang antena ay dapat ibenta sa tatanggap. Nakuha ko ang sumusunod:
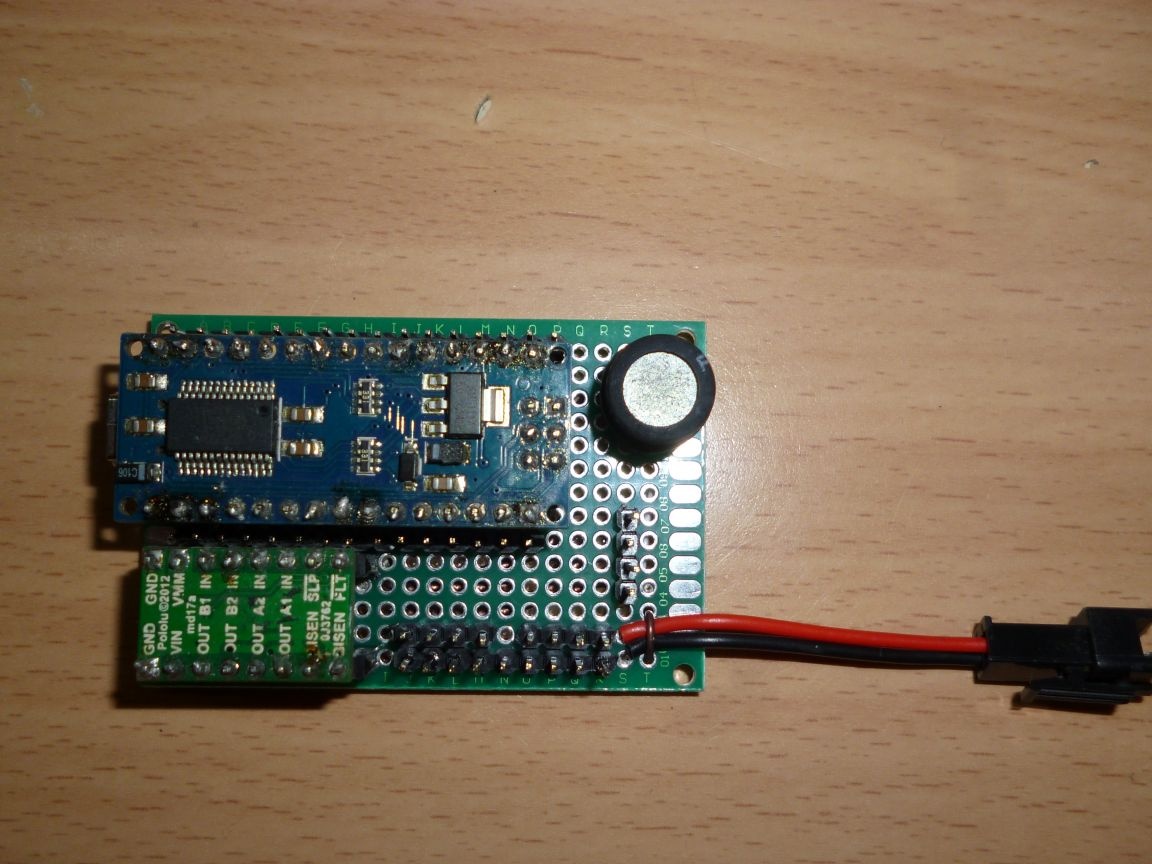
Inilagay namin ang Arduino Nano at DRV 8833 sa kanilang mga lugar:
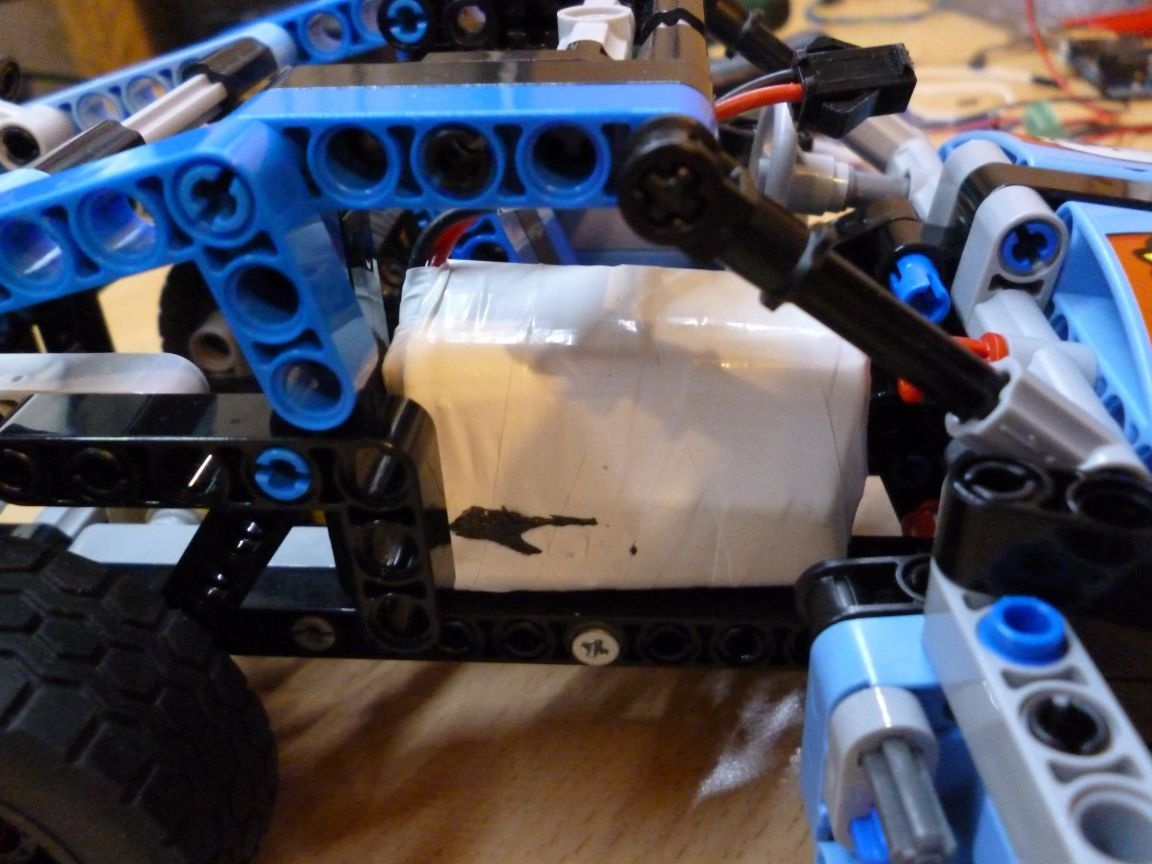
Para sa lakas ay gagamitin namin ang 6 na baterya ng Ni-Mn 1.2v 1000mA, na ibinebenta sa serye at sugat na may de-koryenteng tape. I-pandikit ang mga ito sa isang double-sided adhesive tape passenger seat.

Ikinonekta namin ang lahat ayon sa pamamaraan at mai-install sa likod ng makina. Maaari ka ring magdagdag ng ilang mga LED. Ilagay ang mga ito sa mga headlight at kumonekta sa pin 14 (A2).
Hakbang 4 firmware.
Upang maisulat ang firmware, ginamit ko ang Arduino IDE. Ang kasalukuyang bersyon sa oras ng pagsulat ay 1.8.1. Maginhawa upang ipatupad ang protocol ng komunikasyon gamit ang 433 MHz module gamit ang rc-switch-2.52 library. Kailangan mong i-download ito at idagdag ito sa "mga aklatan" folder ng Arduino IDE.
Ikinonekta namin ang Arduino at flash ito sa mga sumusunod na firmware:
Upang masubukan ang pagganap ng aming modelo, kailangan namin ng pangalawang board Arduino. Kinakailangan na ikonekta ang isang 433 MHz radio transmitter sa pangalawang board. Ang transmiter ay konektado tulad ng mga sumusunod:
VCC (transmitter) hanggang 5+ (Arduino),
GND sa GND,
DATA hanggang D10.
Isulat ang nabagong sketch ng SendDemo. Ito ay sa mga halimbawa sa library na na-install namin, at nagsisilbi upang magpadala ng mga utos. Bago ang pag-flash ng sketch, kailangan mong bahagyang baguhin ito, ibig sabihin, baguhin ang ipinadala na mga utos. Depende sa kailangan mong suriin, isulat ang sumusunod na mga utos sa send line:
"1" - kilusan ng pasulong (sumulat ng utos na walang mga quote!)
"2" - paatras na kilusan
"15" - buong paghinto
"3" - iiwan ang manibela sa kaliwa
"4" - i-on ang kanan sa manibela
"5" - itakda ang manibela sa gitna
"10" - i-on ang mga headlight
"11" - patayin ang mga headlight
Ang paggawa ng isang remote control na may isang 433 MHz radio transmiter ay isang paksa para sa isang hiwalay na artikulo. Tiyak na isusulat ko ang mga tagubilin para sa paggawa ng tulad ng isang remote control.
Gusto kong sabihin na ang pagpipiliang ito ay angkop para sa halos anumang modelo ng mga kotse ng Lego. Ito ay sapat na upang ikonekta ang lahat ng mga mekanika at makahanap ng isang lugar para sa board. At kung isinasama mo ang pantasya, pagkatapos ay maaari mong makamit ang anumang modelo.