

Magandang araw na mahilig sa Arduino! Sa Internet, nakakita ako ng isang medyo kawili-wili at kamangha-manghang robot (o aparato, tawagan ito kung ano ang gusto mo) na "gumaganap" ang Stak na laro, gamit ang parehong mga prinsipyo sa pagpapatakbo maaari kang gumawa ng isang robot na maaaring maglaro ng mga laro tulad ng geometry dash, piano, at iba pa kung saan kailangan mo lang Poke sa screen na may isang tiyak na pagkakasunud-sunod. Ang ginawa ko, mangyaring suriin sa survey sa ibaba.
Kung may interes, narito ang isang video ng gawain ng robot na ito:
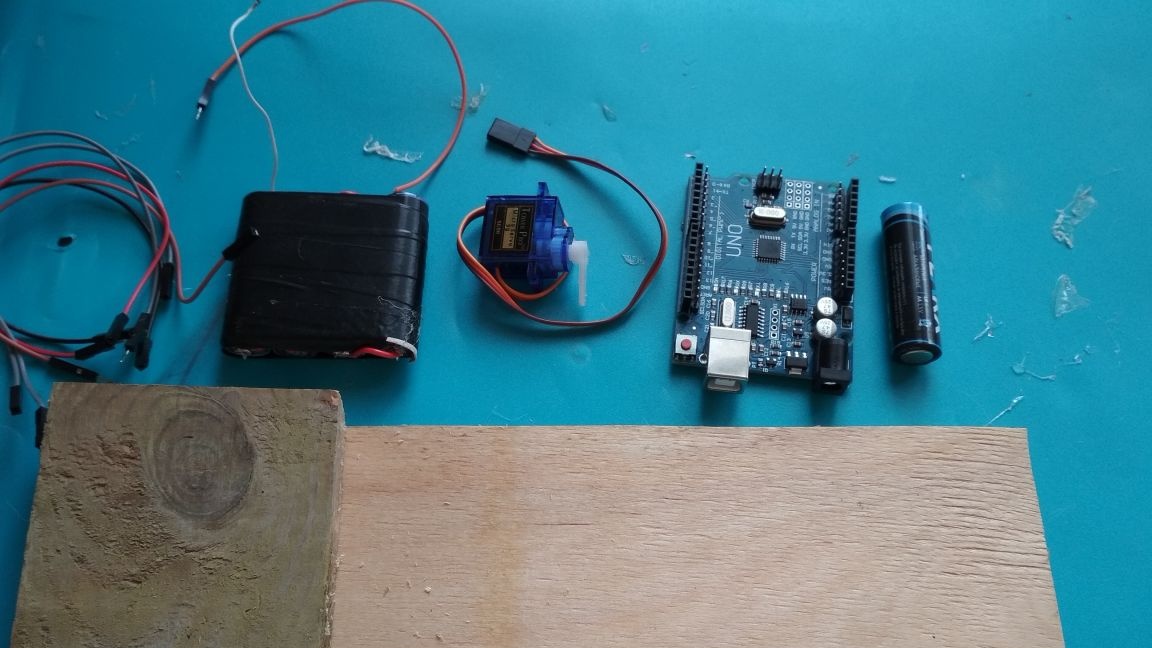
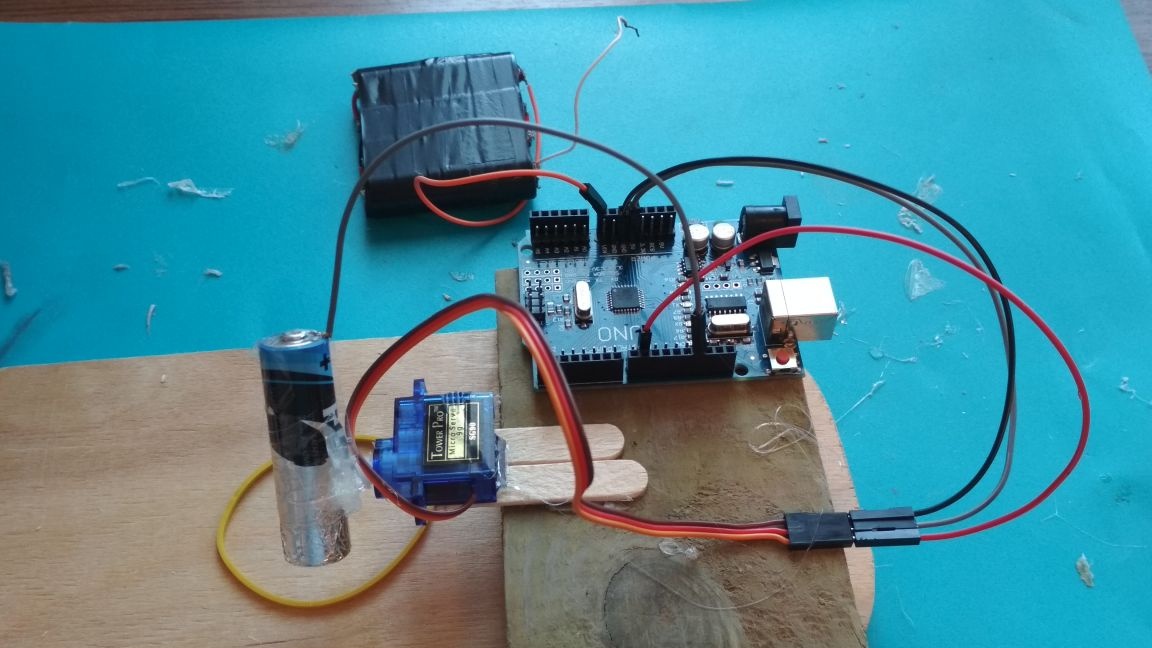
At kaya para sa "robot" na kailangan namin:
pagbabayad Arduino Uno
- pagkonekta ng mga wire tulad ng "ama-ina" o "ama-ama"
-serbisyo
- isang piraso ng playwud
- isang piraso ng board na halos 1 cm ang kapal, ang pangunahing bagay ay ang dalawang beses ay mas makapal kaysa sa playwud
stick ng ice cream
stylus
Foil (kung walang stylus)
-battery (kung walang stylus)
- power supply para sa 6-12 volts (Gumagamit ako ng 4 na baterya ng daliri na konektado sa serye)
Mula sa mga tool na kailangan namin:
gunting
thermal pandikit
At kaya ang unang bagay na dapat gawin ay upang i-cut ang isang piraso ng dalawang beses nang malaki kaysa sa iyong telepono mula sa isang piraso ng playwud, maaari kang mas malaki, at kailangan mong i-cut ang isang piraso ng laki ng iyong telepono mula sa board (gumawa ako ng bahagyang magkakaibang laki, ngunit hindi ito kritikal sa lahat). Pagkatapos ay idikit namin ang aming mga blangko tulad ng ipinapakita sa larawan:

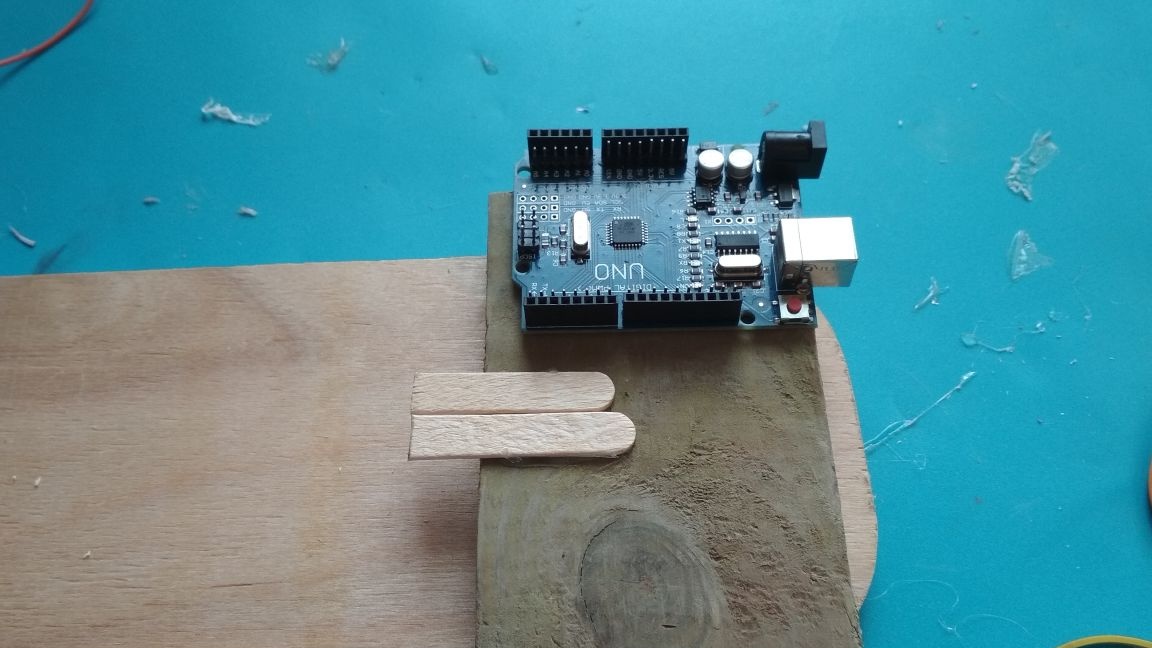
Kumuha ng ice cream stick at gupitin ito sa halos kalahati:

I-pandikit ang mga ito sa gitna ng board, mula sa gilid ng playwud, tulad ng ipinapakita sa larawan:

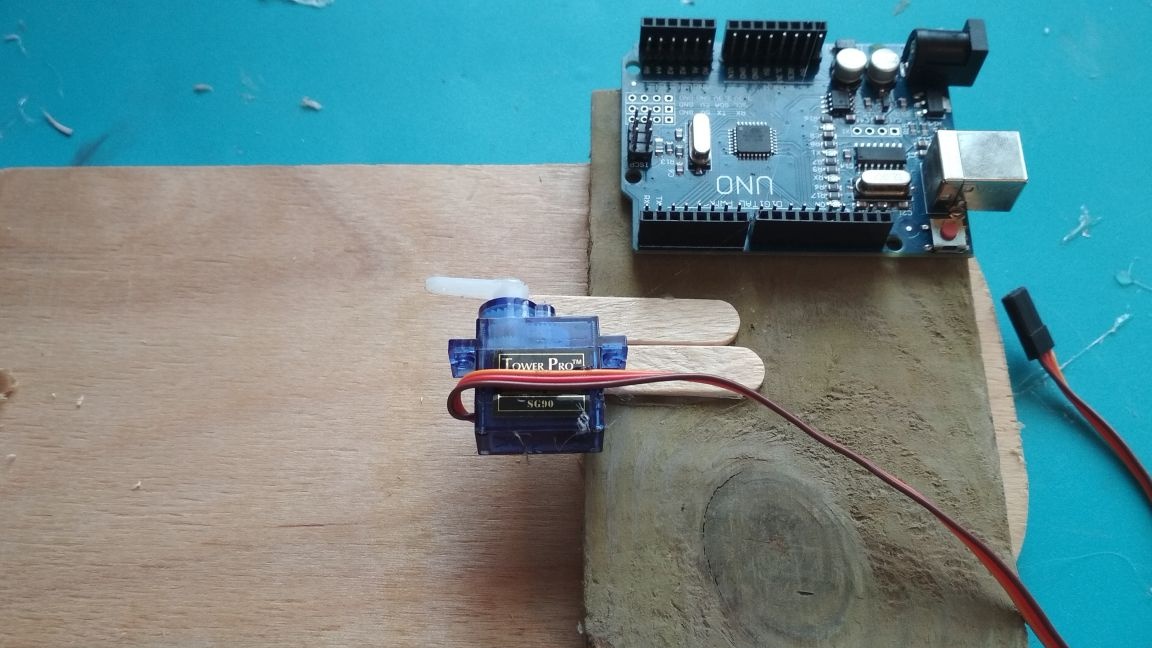
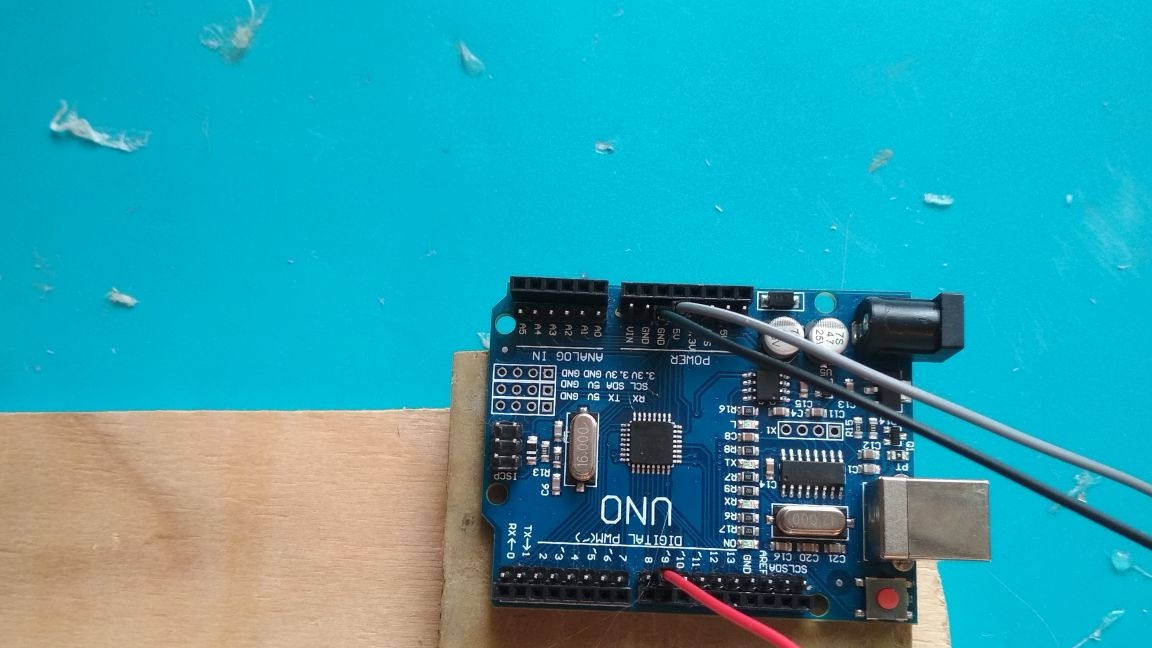
Dinikit namin ang Ardino Uno board mula sa gilid ng board:
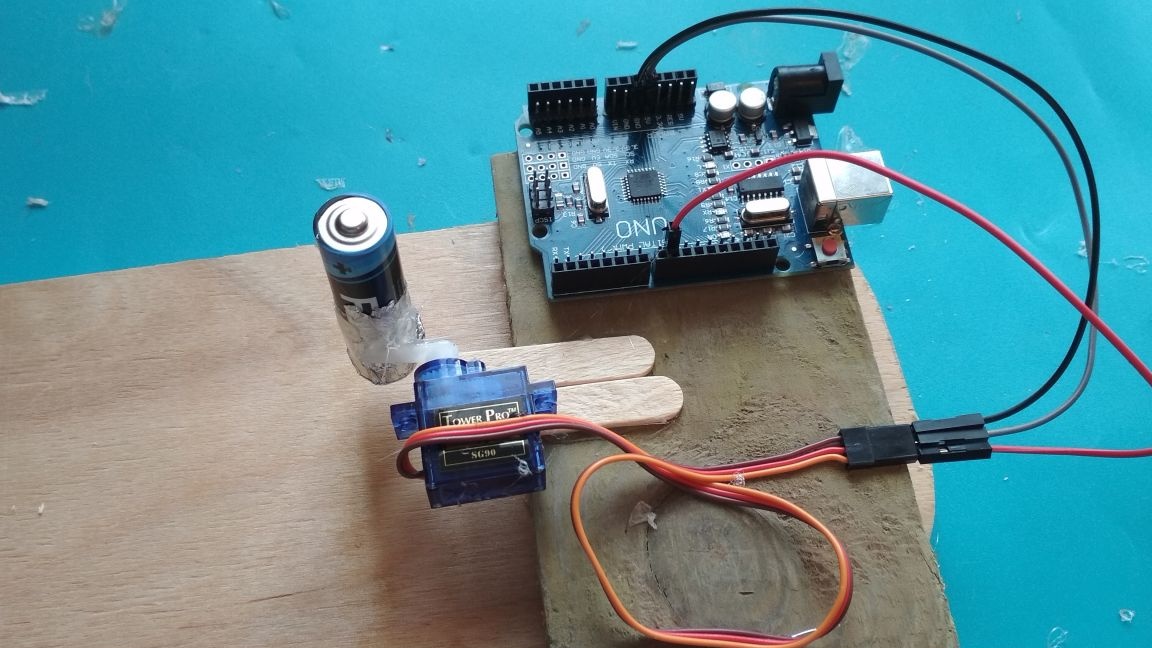
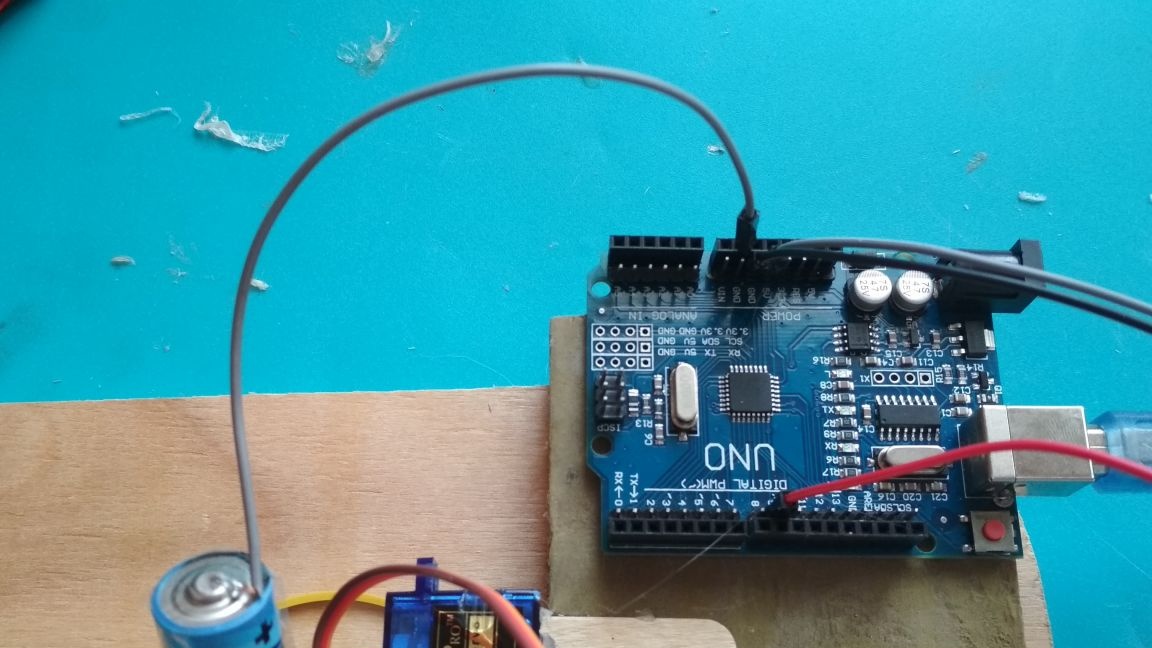
Kinukuha namin ang servomotor at nakadikit ang mga wire upang hindi sila makagambala:
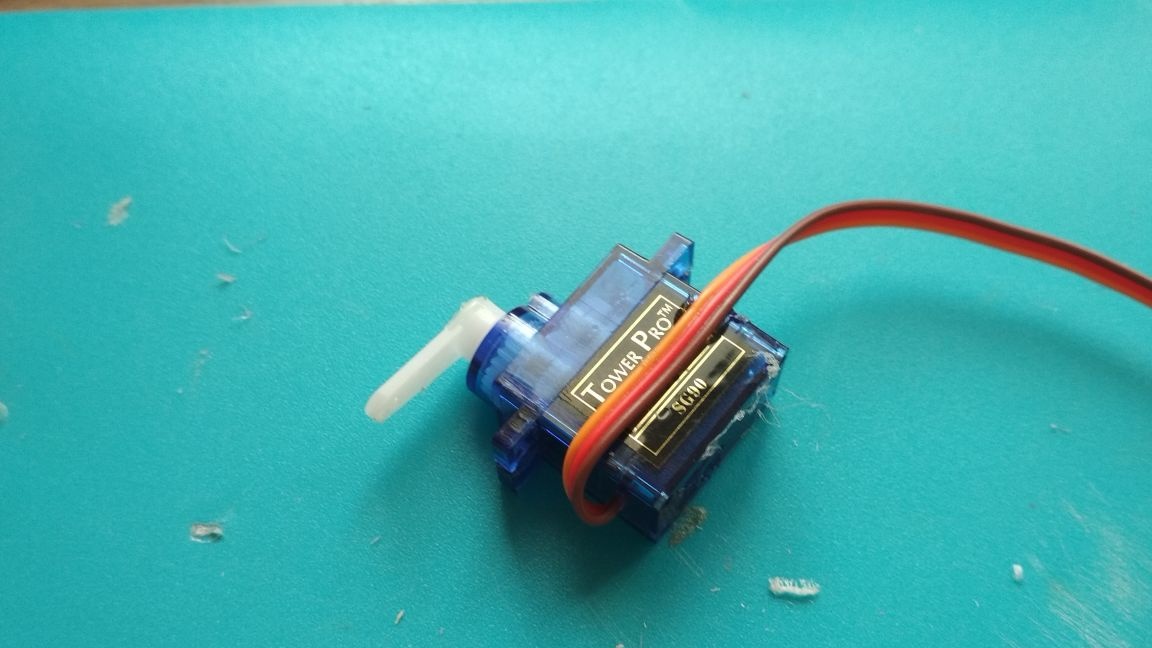
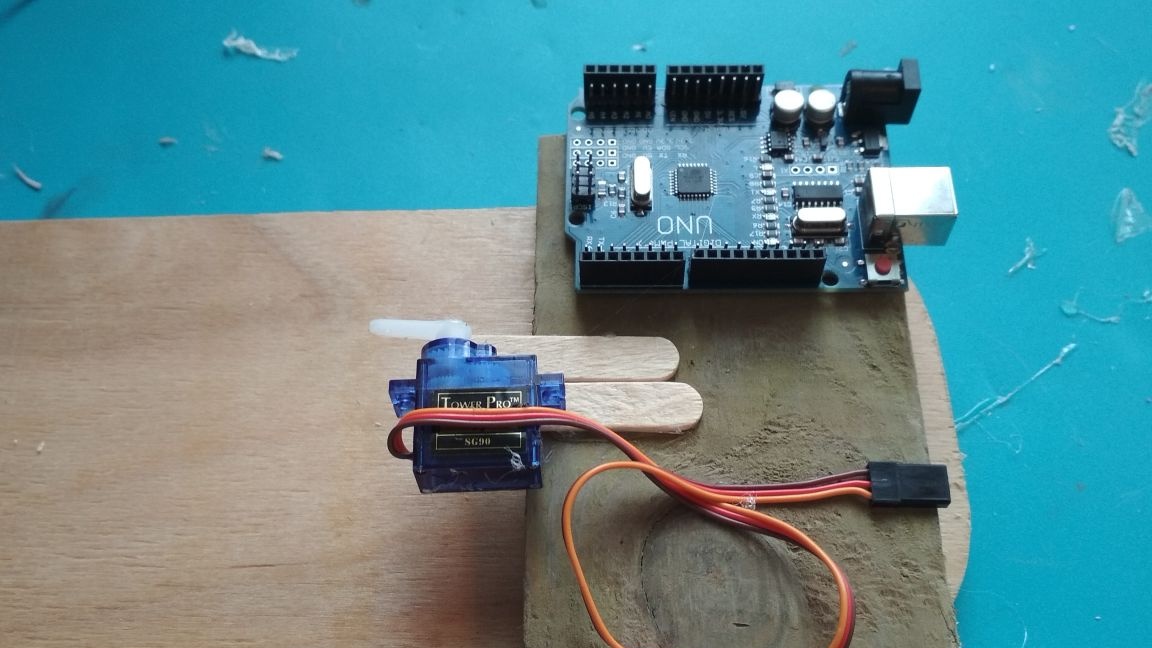
Idikit ang servomotor hanggang sa dulo ng mga halves ng mga ice cream sticks:
Inilalagay namin ang mga wire at nakadikit ang output ng motor ng servo sa gilid ng board.
Magdagdag ng 3 wires ng ama-ina, mas mabuti sa iba't ibang kulay, upang hindi malito
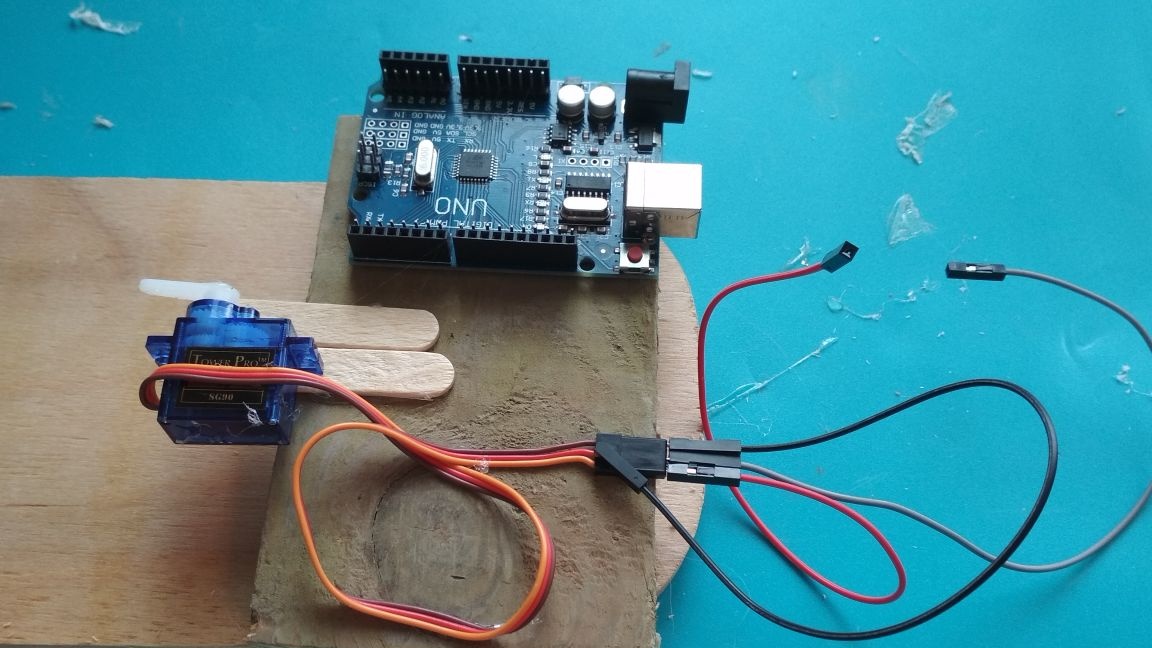
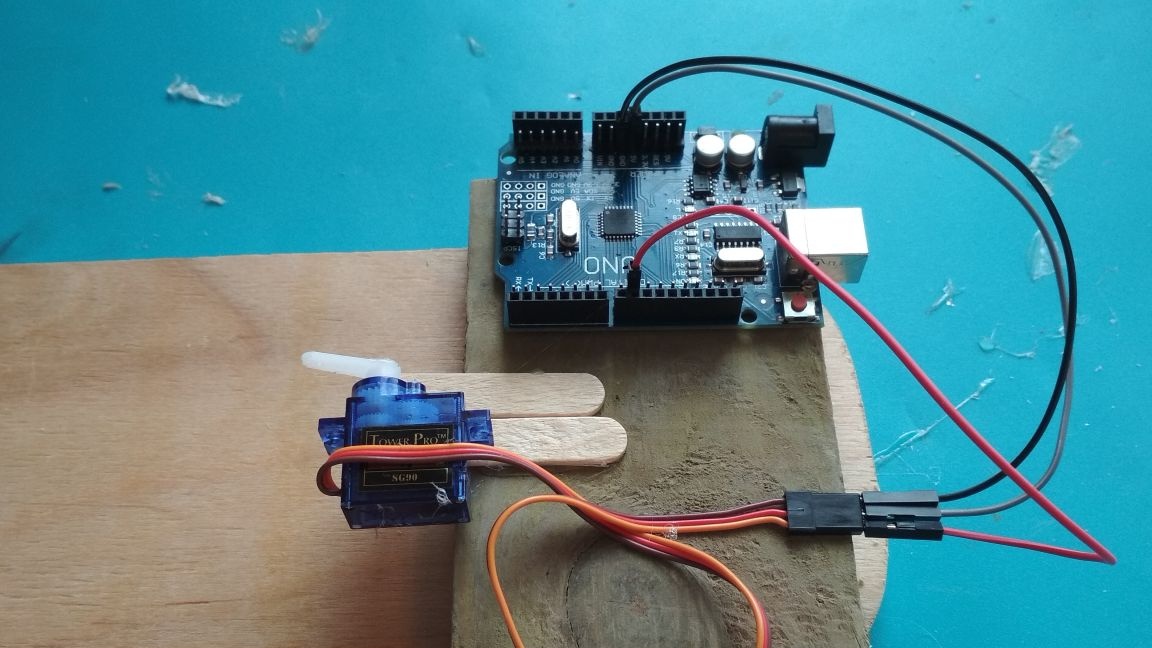
Ikinonekta namin ang servo drive sa board ng Arduino tulad ng sumusunod:
kayumanggi kawad hanggang gnd
-Red wire sa 5v
- orange wire sa 9 "digital pin"
Kung wala kang stylus, tulad ng minahan, pagkatapos ay huwag mawalan ng pag-asa, napakasimpleng gawin.
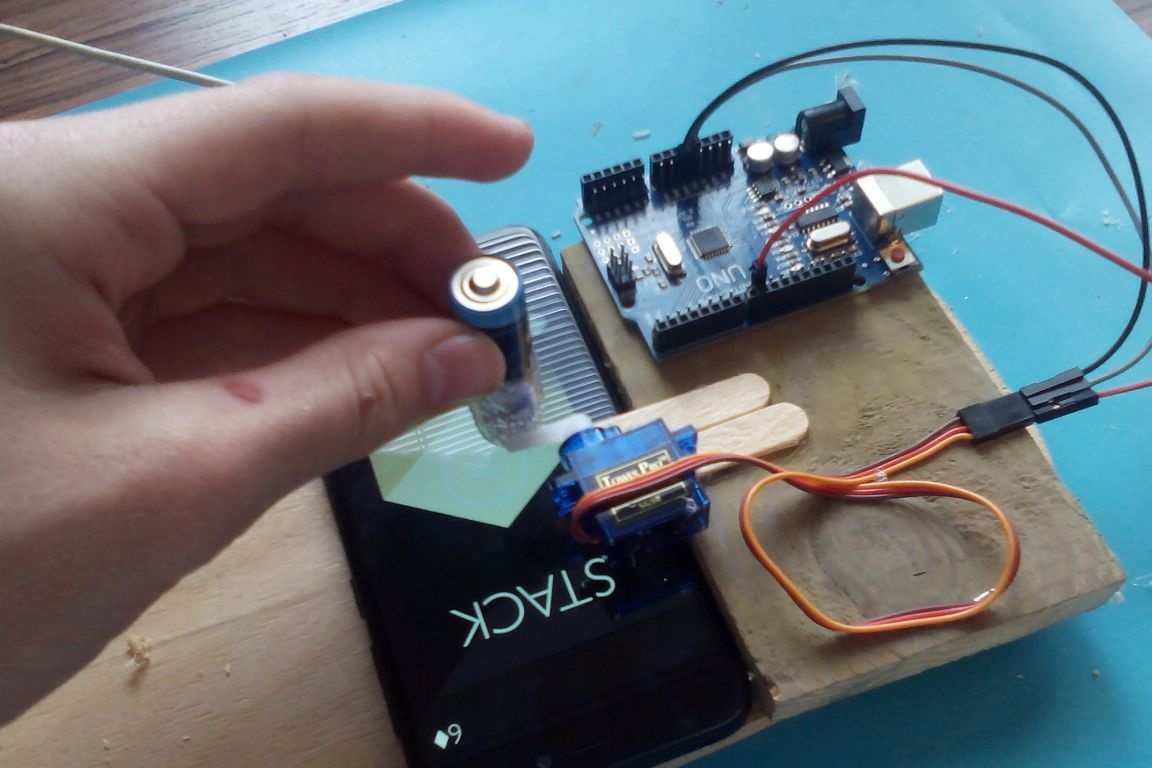
Kumuha kami ng isang regular na baterya ng daliri at negatibong panig nang mahigpit hangga't maaari, balutin ito ng foil, at pagkatapos ay i-tape namin ito nang mahigpit:

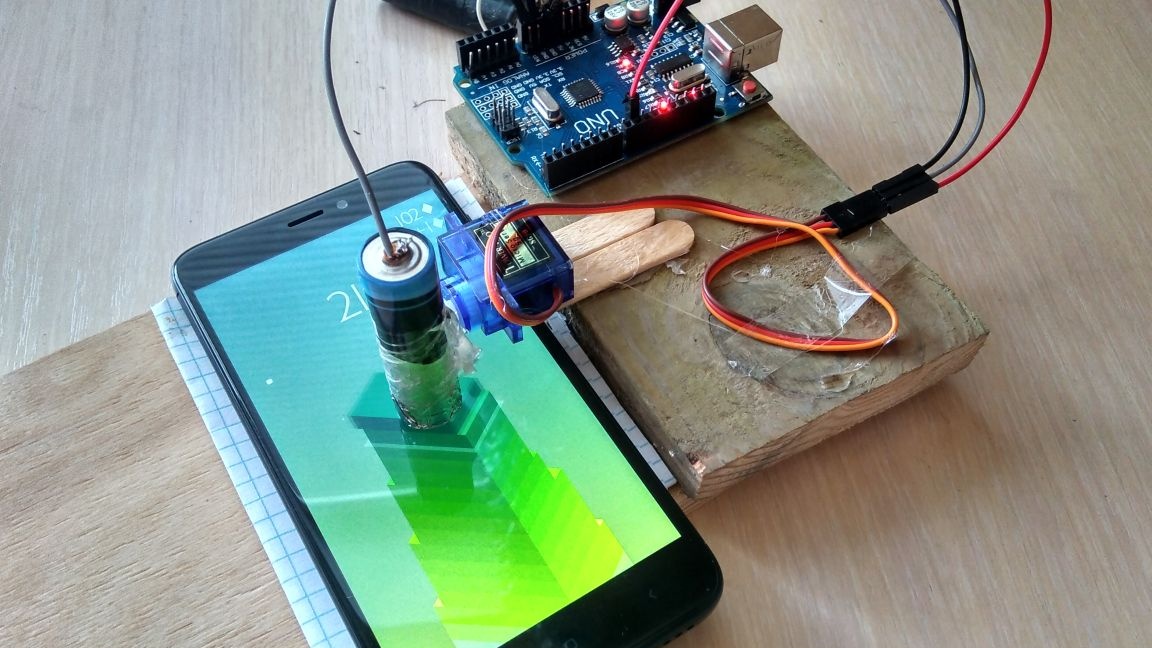
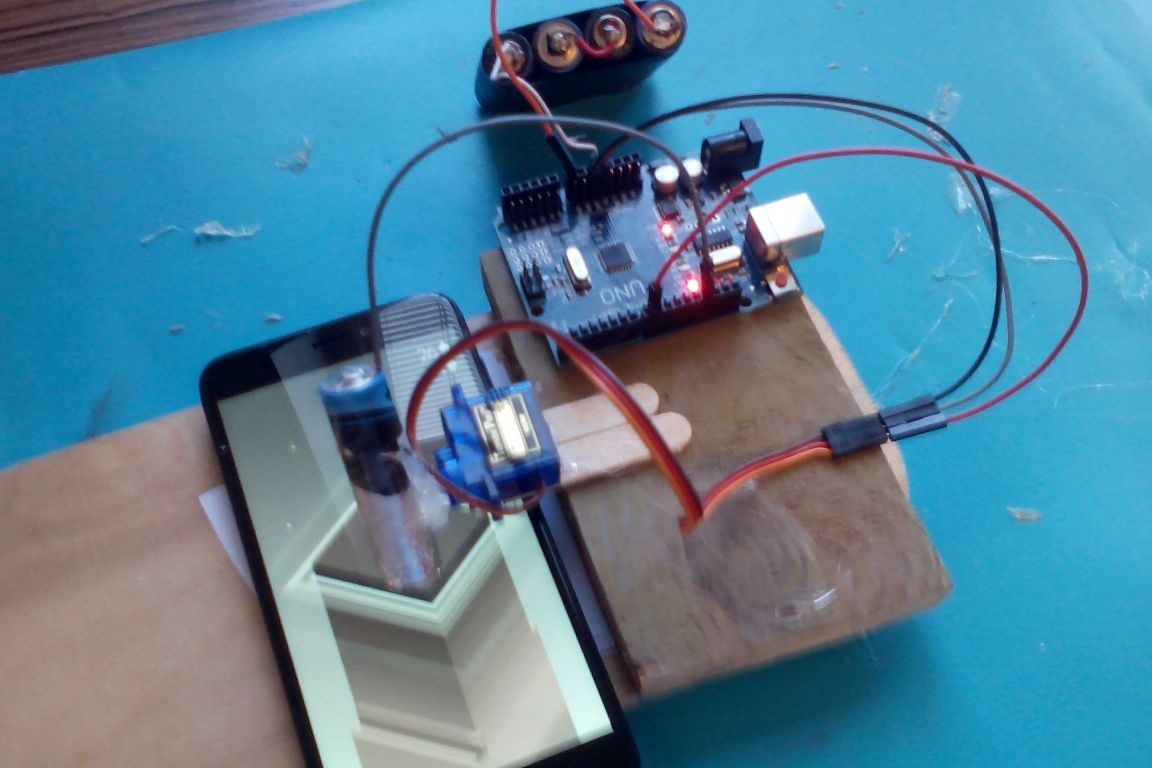
Ngayon ay kailangan mong ilagay ang telepono sa playwud sa ilalim ng servomotor, ikabit ang baterya sa itaas at tandaan kung anong antas kami ay idikit ang aming "stylus". Matapos naming mapansin ang lahat, mahigpit na ipikit ang "stylus" sa pingga ng servomotor, mahigpit sa isang anggulo ng 90 degree (ang parehong anggulo ay dapat na kapag inilalapat ang "stylus" sa telepono kapag sinusukat namin ito). Ang lahat ay dapat na gumana tulad ng ipinapakita sa larawan:

Ngayon ikinonekta namin ang aming "robot" sa computer sa pamamagitan ng port na na-configure sa Arduino IDE, patakbuhin ang dating pinangalanan na Arduino IDE at kopyahin ang sketch sa ibaba, pagkatapos ay i-click ang pindutan ng "download". Kung ang lahat ay tapos na nang tama, ang sketch ay mag-load nang walang anumang mga pagkakamali at pagkatapos ng ilang segundo ang servomotor ay magsisimula sa trabaho nito. Kung mayroon kang mga makabuluhang pagkakaiba sa laki ng stylus at servomotor, pagkatapos ay gawin itong sketsa para sa iyong sarili, medyo simple ito.
Narito ang isang sketsa:
#nagsama
Servo servo1;
walang pag-setup ()
{
servo1.attach (9);
servo1.write (125);
pagkaantala (5000);
servo1.write (90);
pagkaantala (200);
servo1.write (125);
pagkaantala (750);
}
walang bisa loop ()
{
servo1.write (90); // 1
pagkaantala (200);
servo1.write (125);
pagkaantala (600);
}Gamit ang malagkit na tape o de-koryenteng tape, isinasaksak namin ang hinubad na bahagi ng isang "ina-sa-ina" na uri ng kawad na may isang cut-off na "ina" na output sa plus na bahagi ng aming "stylus" at output ang wire na ito sa Gnd sa Arduino:
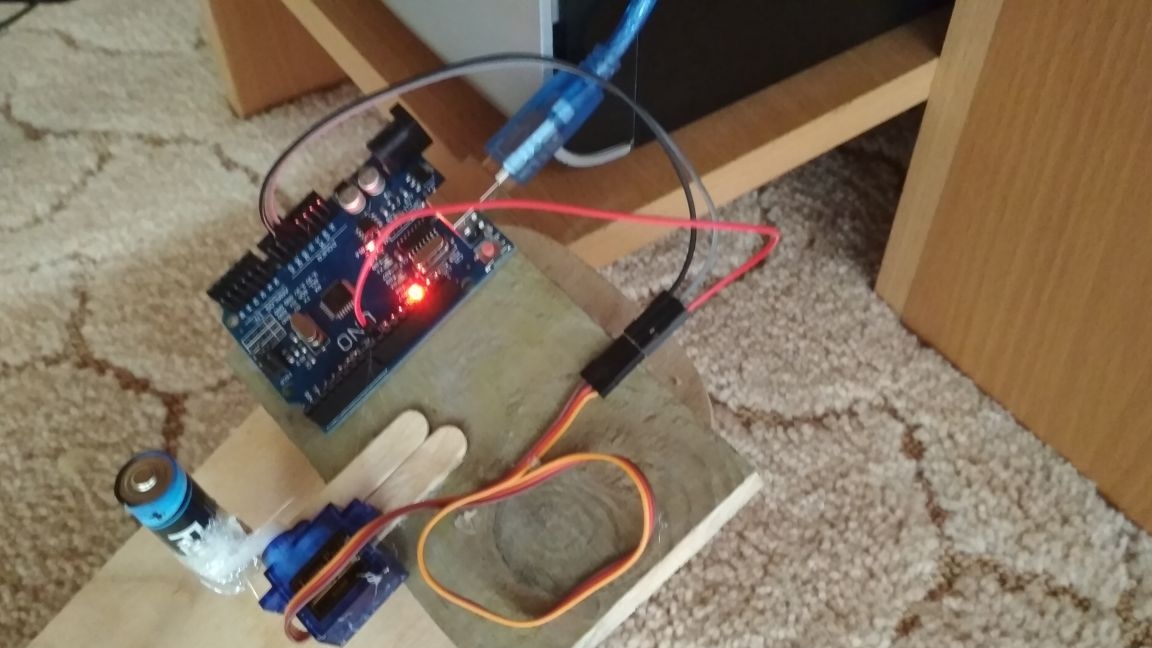
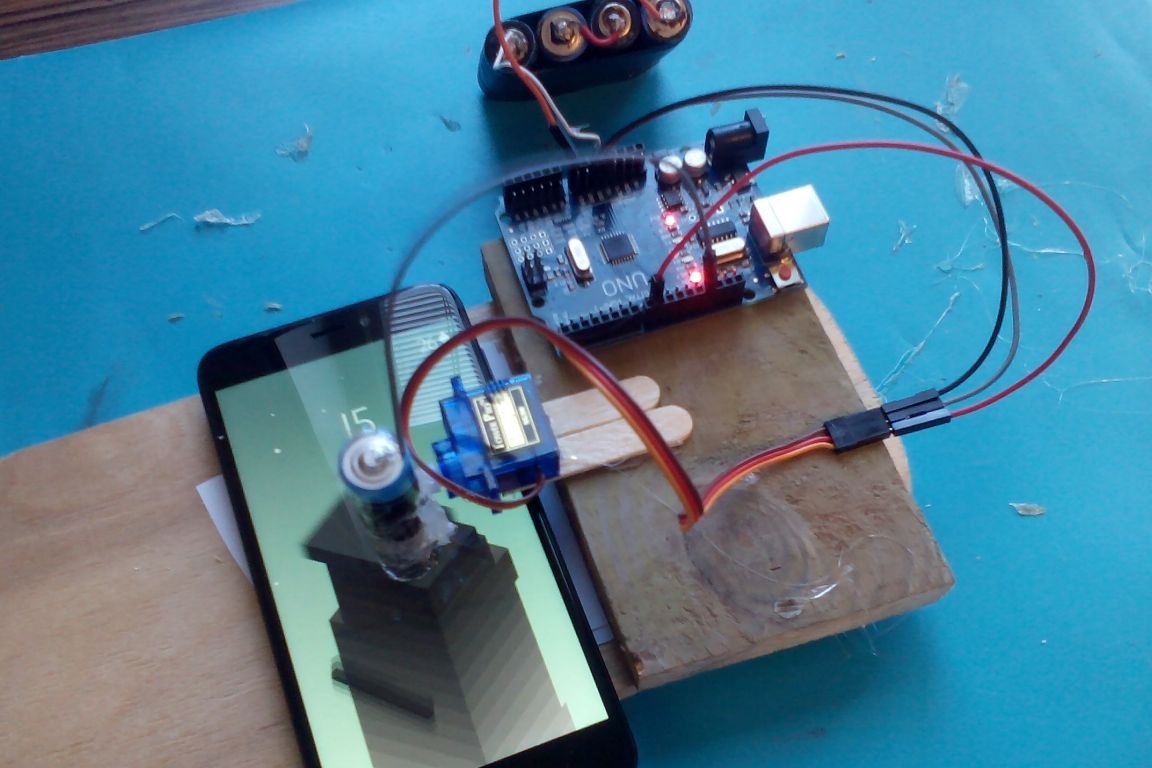
Oo, iyan! Ang aming simple ang robot handa na at nananatili lamang ito upang subukan ito! Upang gawin ito, ilagay ang telepono sa ilalim ng stylus, ilunsad ang application na Stak at ilagay ang telepono upang ito ay nasa itaas ng pindutan ng "play", na ipinapahiwatig ng isang arrow, ikinonekta namin ang kapangyarihan sa arduino alinman sa tulong ng isang espesyal na adapter o maglalabas kami ng plus mula sa aming "baterya" hanggang sa Uin sa Arduino, at minus sa gnd. pagkatapos ng pagkonekta sa kapangyarihan, ang aming robot ay agad na nagsisimulang "maglaro". At kahit na dahil sa ang katunayan na hindi ako ginamit ng isang normal na stylus, ngunit isang Baterya, ang aming robot ay madalas na hindi nakakuha ng tulin at hindi nakuha, ito ay "nilaro nang mahabang panahon. Kung ang lahat ay tapos na nang tumpak, sa pangkalahatan ito ay i-play hanggang sa bumaba ang telepono.

Salamat sa lahat para sa iyong pansin!