


Kinuha ko ang bahagi ng aking disenyo mula sa mga tagubiling Lego Technic 42049 na pagpupulong.Ang natitira ay ang aking improvisasyon. Para sa pamamahala, gagamit ako ng isang module ng Bluetooth na konektado sa isang aparato sa android o computer.
Kaya kailangan namin:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- 2 L9110S Engine driver
- 1 servo drive SG-90
- Bluetooth module HC-05 o katumbas
- USB-UART para sa arduino firmware
- Mini gear motor 50 rpm
- Mini motor gearbox 100 rpm
- Motor gearbox 6v 150 rpm
- 2 LEDs
- 2 resistors 150 ohms
- Capacitor 10v 1000uF
- 2 solong hilera ang sumali sa PLS-40
- Inductor 68mkGn
- 6 na baterya NI-Mn 1.2v 1000mA
- Konektor ng tatay-nanay ng dalawang pin sa kawad
- Homutik
- Mga wire ng iba't ibang kulay
- nagbebenta
- Rosin
- paghihinang bakal
- Bolts 3x20, nuts at tagapaghugas para sa kanila
- Bolts 3x40
- Bolts 3x60
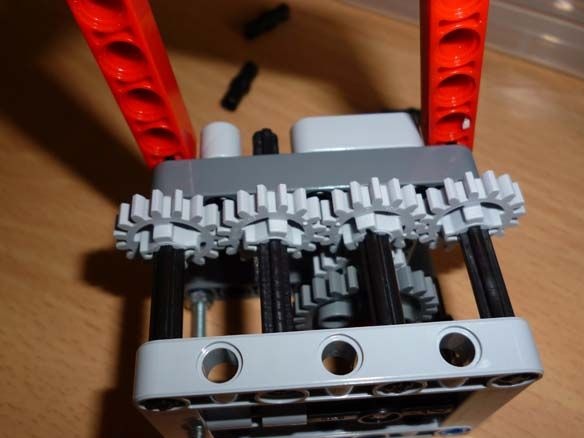
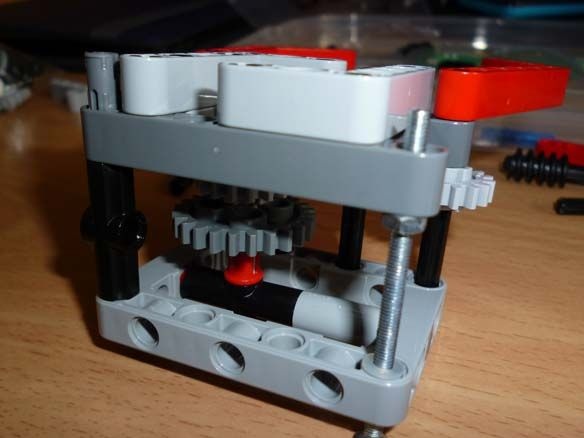
Hakbang 1 Rear Axle Assembly
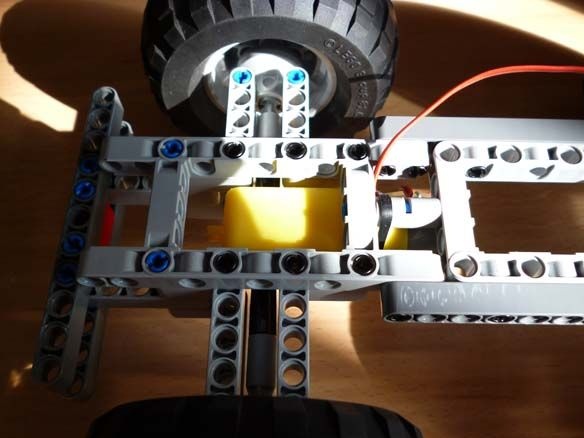
Para sa paggalaw, gagamit kami ng isang motor motor na may isang 6 boltahe na motor sa bilis na 150 rpm. Ang axis ng gearbox ay dapat i-cut mula sa magkabilang panig at ilagay sa mga bahagi ng lego. Ang hulihan ng ehe ay tipunin tulad ng sumusunod:
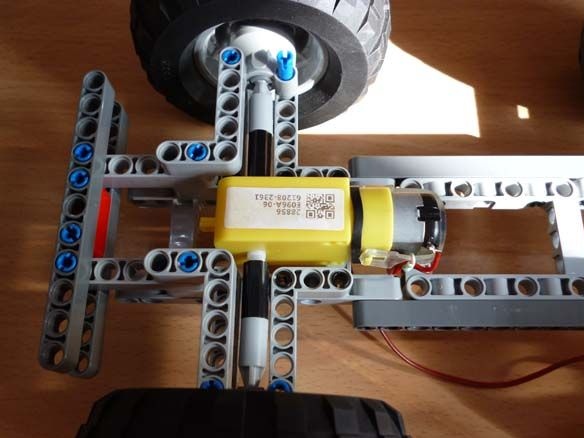
At sa flip side:
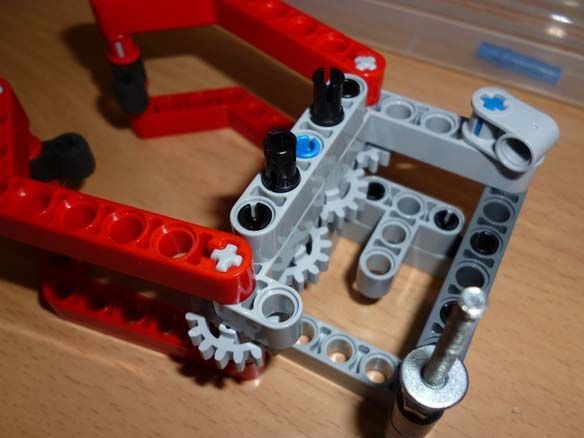
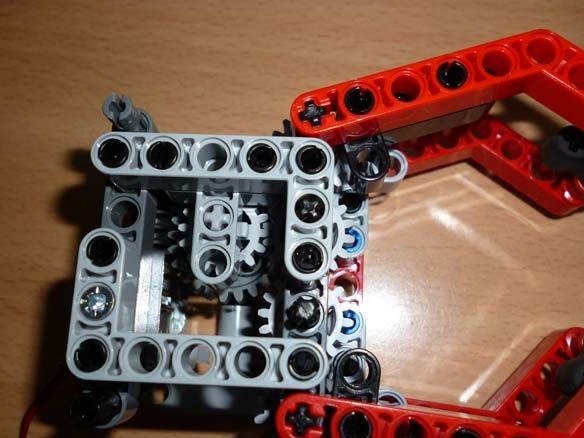
Hakbang 2 Pagtitipon sa Front Axle
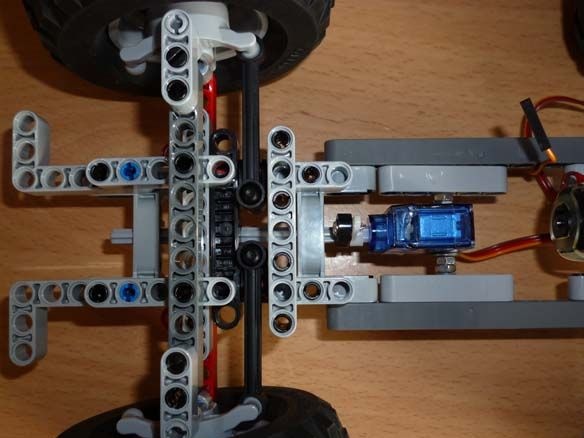
Para sa pag-ikot ng mga gulong, ang SG-90 servo ay mahusay na angkop. Upang ayusin ito sa aming modelo, kinakailangan na maingat na mag-drill, upang hindi hawakan ang mga panloob na bahagi ng servo, isang butas na may diameter na 3.2 mm o pinutol lamang ito gamit ang isang headset na nakalagay. At pinutol din ang mga nakausli na bahagi ("mga pakpak" para sa pag-fasten). Nagpasok kami ng isang bolt sa butas na ginawa at ayusin ito ng mga mani. Sa servo shaft ay inilalagay namin sa isang pingga na may naka-screw na bahagi mula sa lego:

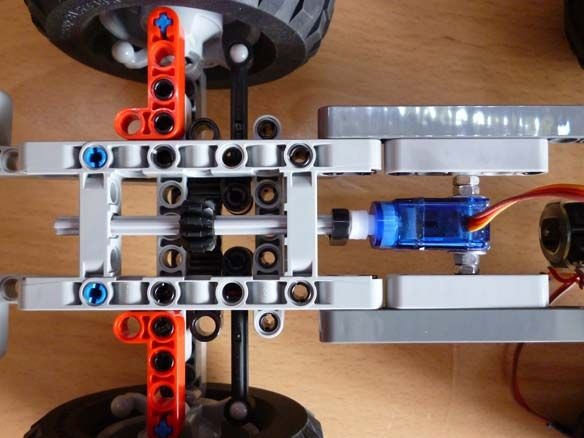
At sa flip side:
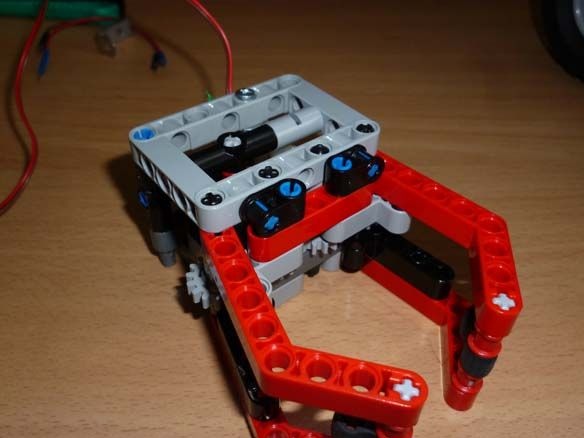
Hakbang 3 Pagtitipon ng base at taksi
Ikinonekta namin ang parehong mga tulay tulad ng ipinapakita sa larawan:

Pinagsasama namin ang cabin (kinakailangan para sa kagandahan):
Inilalagay namin ang cabin batay sa:

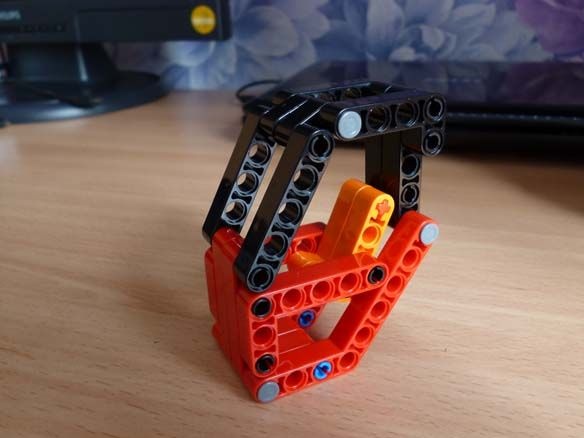
Hakbang 4 Ang paglalagay ng isang Cap o Claw
Ang claw ay hinihimok ng isang mini motor gearbox sa bilis na 50 rpm. Nalutas ko ang problema ng pagkonekta sa motor ng gear sa mga bahagi ng taga-disenyo tulad ng sumusunod: Naglagay ako ng isang pagkonekta ng manggas sa axis ng motor ng gear at inilagay ang isang scrap ng isang tugma para sa pag-aayos. Para sa pag-mount, ginamit ang motor motor ng metal na plastik mula sa isang disenyo ng bakal at isang salansan. Ito ay ang mga sumusunod:

Susunod, kinokolekta namin ang claw mismo mula sa larawan:

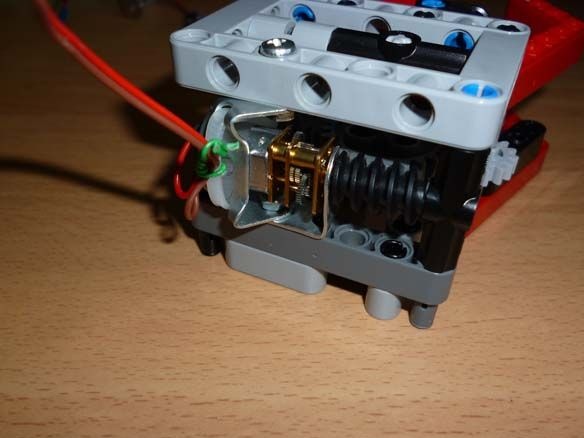
Inaayos namin ito sa base:
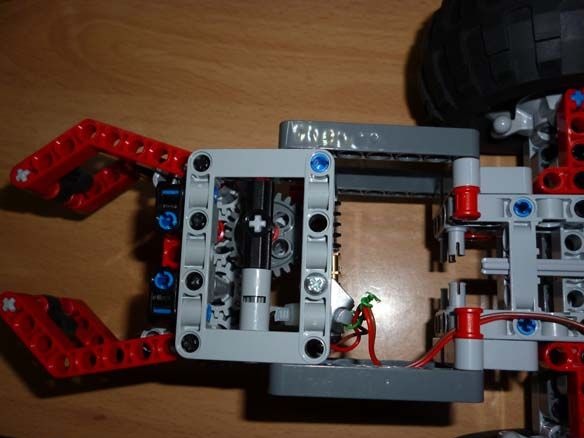

Ang isang mini motor gearbox na may bilis na 100 rpm ay angkop para sa pag-aangat ng isang claw:


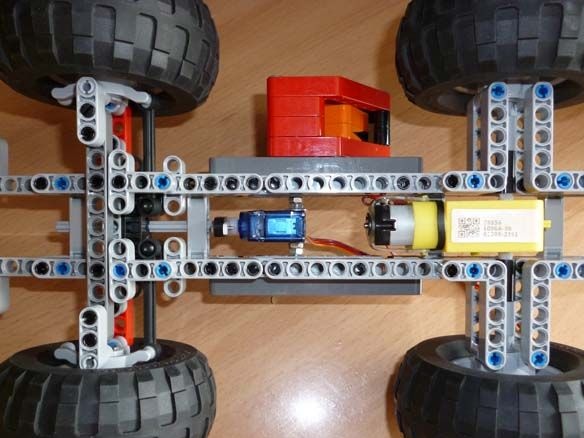
Hakbang 5 Elektronikong
Para sa kontrol, gagamitin namin ang Arduino Pro Mini at ang module ng Bluetooth. Kinakailangan ang mga motor driver upang ikonekta ang mga motor.
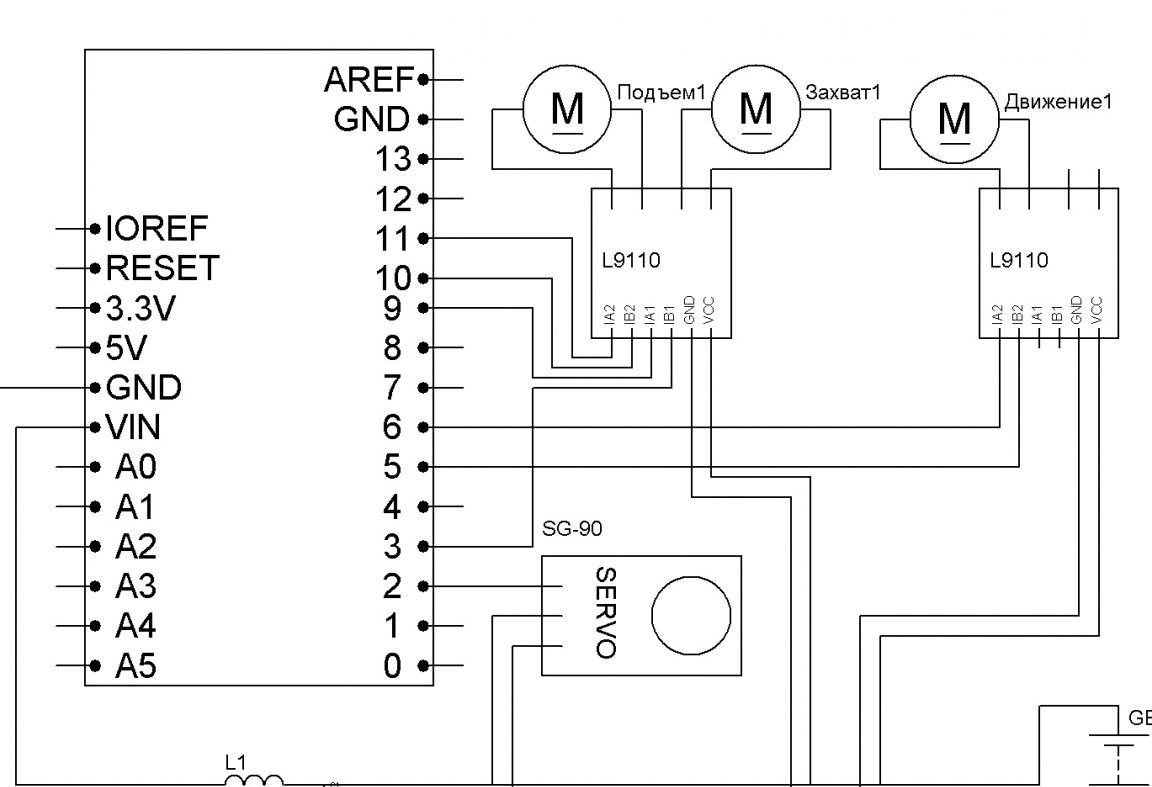
Koneksyon ng lahat ng mga sangkap na may mga wire ng ina-sa-ina na Dupont.Power - 6 na baterya NI-Mn 1.2v 1000mA na konektado sa serye. Ang isang kapasitor ng anumang mababang lakas, isang inductor din ay makikita mo, kailangan mong patatagin ang lakas ng microcontroller. Ang mga anod ng dalawang LEDs ay konektado sa 4 pin arduino, ang mga cathode sa GND. Ang mga resistor ay pinili para sa mga LED na ginamit. Para sa kaginhawaan, reel ang baterya na may tape.

I-glue namin ang lahat sa isang double-sided tape batay sa:

Hakbang 6 Setup ng Bluetooth
Ang pinaka-abot-kayang mga module ng Bluetooth ngayon ay ang HC-05 at HC-06. Sagana sila sa mga online na tindahan ng Intsik. Ang mga pagkakaiba sa pagitan nila ay ang una ay maaaring gumana pareho sa master mode (alipin) at sa mode ng alipin (master). Ang pangalawa ay isang purong alipin na aparato. Sa madaling salita, ang HC-06 ay hindi makakakita ng isang ipinares na aparato at makapagtatag ng isang koneksyon dito, maaari lamang itong sumunod sa master.
Maikling katangian ng modules:
- Bluetooth chip - BC417143 na gawa ni
- Protocol ng komunikasyon - Pagtutukoy ng Bluetooth v2.0 + EDR;
- radius ng aksyon - hanggang sa 10 metro (antas ng kuryente 2);
- Mga katugmang sa lahat ng mga adaptor ng Bluetooth na sumusuporta sa SPP;
- Ang halaga ng flash-memory (para sa pag-iimbak ng firmware at mga setting) - 8 Mbit;
- ang dalas ng signal ng radyo - 2.40 .. 2.48 GHz;
- host interface - USB 1.1 / 2.0 o UART;
- Pagkonsumo ng kuryente - ang kasalukuyang sa panahon ng komunikasyon ay 30-40 mA. Ang average na kasalukuyang halaga ay tungkol sa 25 mA. Matapos maitaguyod ang koneksyon, ang natupok na kasalukuyang ay 8 mA.Walang mode ng pagtulog.
Karaniwan, ang mga module ay ibinebenta bilang magkasama ang dalawang board. Ang mas maliit ay isang module ng pabrika, malawakang ginagamit sa iba't ibang electronic aparato. Malaki - isang espesyal na breadboard para sa DIY. Mukhang isang mas maliit na board na may isang BC417 chip:

At sa gayon ang DIY modules HC-05 at HC-06 mismo:
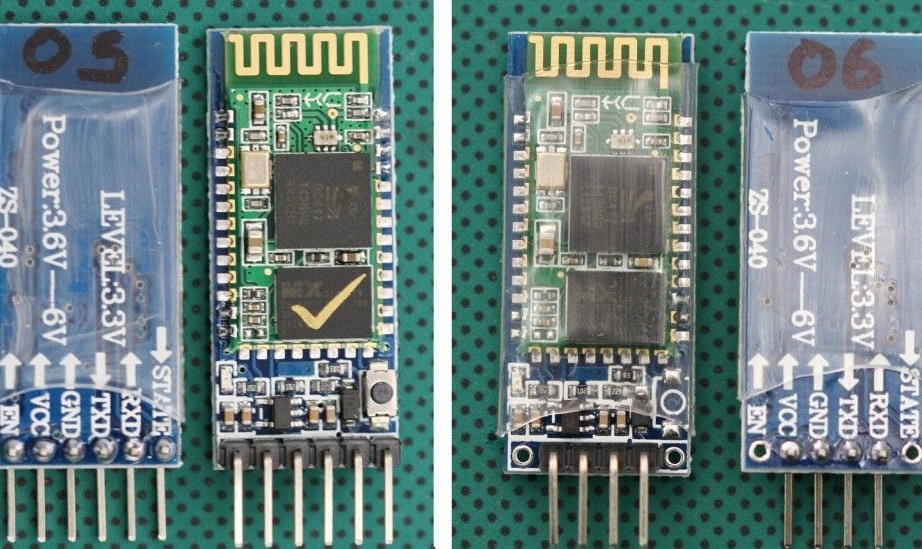
Sa prinsipyo, maaari mong gamitin ang anumang module na gusto mo. Ang isang module na walang isang aparador ay nagkakahalaga ng mas kaunti, ngunit pagkatapos ay kakailanganin mong alagaan ang 3.3 V power supply para sa module at pahirapan ang iyong sarili sa pamamagitan ng paghihinang mga wire sa module. Pinili ko ang pinakamainam, sa aking opinyon, sa presyo / pagganap na ratio HC-06.
Ikinonekta namin ang mga sumusunod:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Para sa tamang operasyon, ang module ay dapat na-configure. I-configure namin ang mga utos na pinasok sa window ng terminal. Nagbibigay ako ng isang halimbawa ng pag-set up ng HC-05 module. Kung mayroon kang ibang setting ay maaaring naiiba. Upang makatanggap ang aming module ng mga utos, una naming pinasimulan ang Arduino gamit ang mga sumusunod na firmware:
Sa kasong ito, ang Arduino ay kumikilos bilang isang tulay sa pagitan ng mga computer at module. Sa firmware, gumagamit ako ng library ng SoftwareSerial. Sa mataas na bilis, ito ay gumagana nang hindi matatag. Kung nais mo ang mataas na bilis, maaari mong ikonekta ang module nang direkta sa mga contact ng Arduino RX at TX at muling isulat ang firmware. Ngunit sa aking kaso, gagana kami sa module sa bilis na 9600. Kaya pagkatapos ng firmware, buksan ang terminal at ipasok ang:
"AT" (nang walang mga quote) ang sagot na "OK" ay darating (nangangahulugang ang lahat ay konektado nang tama at gumagana ang module)
"AT + BAUD96000" (nang walang mga quote) ang sagot na "OK9600" ay darating.
Kung mayroon kang tamang sagot, pumunta sa susunod na hakbang.
Hakbang 7 firmware
Upang maisulat ang firmware at ang firmware mismo, ginamit ko ang Arduino IDE. Ang kasalukuyang bersyon para sa ngayon ay 1.8. Talagang firmware:
Hakbang 8 I-set up ang iyong telepono.
Sa isang telepono ng Android, kailangan mong mag-install ng isang programa upang makontrol ang robot sa pamamagitan ng Bluetooth. Marami sa kanila. Maaari kang magpasok ng "Bluetooth Arduino" sa pag-play ng Google at pumili sa iyong panlasa. Nagustuhan ko ang BT Controller. I-download at i-install sa iyong Android phone o tablet. Susunod, sa pamamagitan ng mga setting ng Android, kailangan mong magtatag ng isang koneksyon sa aming module. Ang password para sa koneksyon ay "1234" o "0000". Susunod, i-configure ang programa para sa naaangkop na mga utos. Nasa ibaba ang listahan.
Hakbang 9 Computer Setup (kung kinakailangan)
Kung kinakailangan, o kaginhawaan para sa kontrol, maaari kang gumamit ng computer o laptop. Upang gawin ito, ang computer ay dapat magkaroon ng Bluetooth. Itinatag namin ang komunikasyon sa aming module sa pamamagitan ng mga kontrol sa computer. Susunod, kailangan namin ng isang terminal upang magpadala ng mga utos. Anumang maginhawa para sa iyo. Ang pagkakaroon ng naitala ang firmware, ang kontrol ay isinasagawa ng mga sumusunod na pindutan (mga utos):
W - pasulong
S - pabalik
A - kaliwa
D - tama
F - huminto
G - manibela
K - mga headlight
L - off ang headlight
R - iangat
E - pababa
Q - itigil ang pag-angat
T - makunan
Y - Paglabas
H - Tigilan ang Claw
Ang patuloy na pagpasok ng mga utos ay hindi naaayon, kaya inirerekumenda ko ang paggamit ng programa upang magpadala ng mga utos. Gumagamit ako ng Z-Controller.Sa programa, piliin ang port (com port kung saan ginawa ang koneksyon) at i-configure ang mga susi para sa mga utos. I-set up ang walang ginagawa at madaling maunawaan.
