
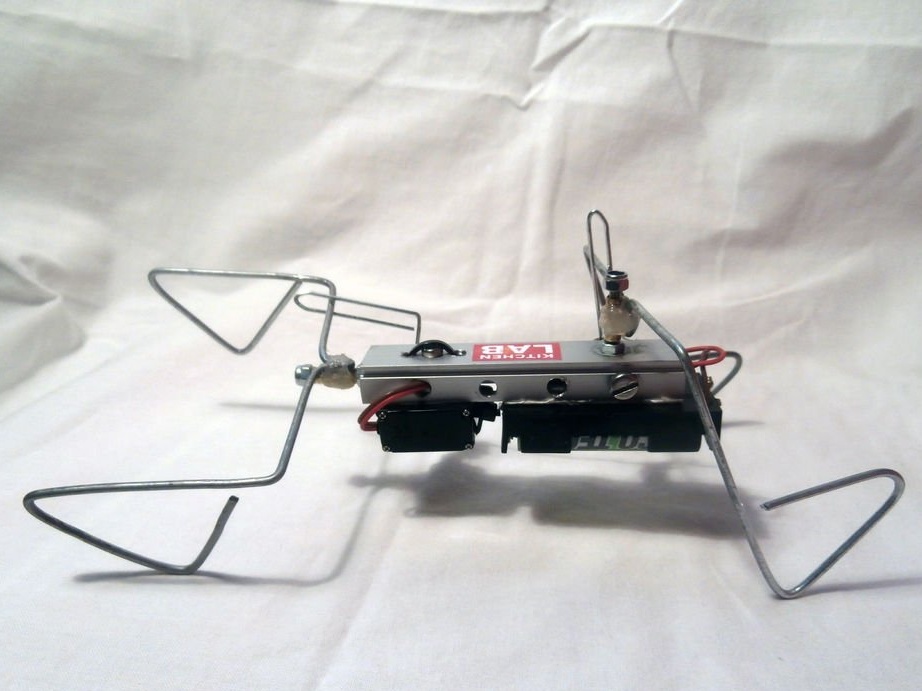
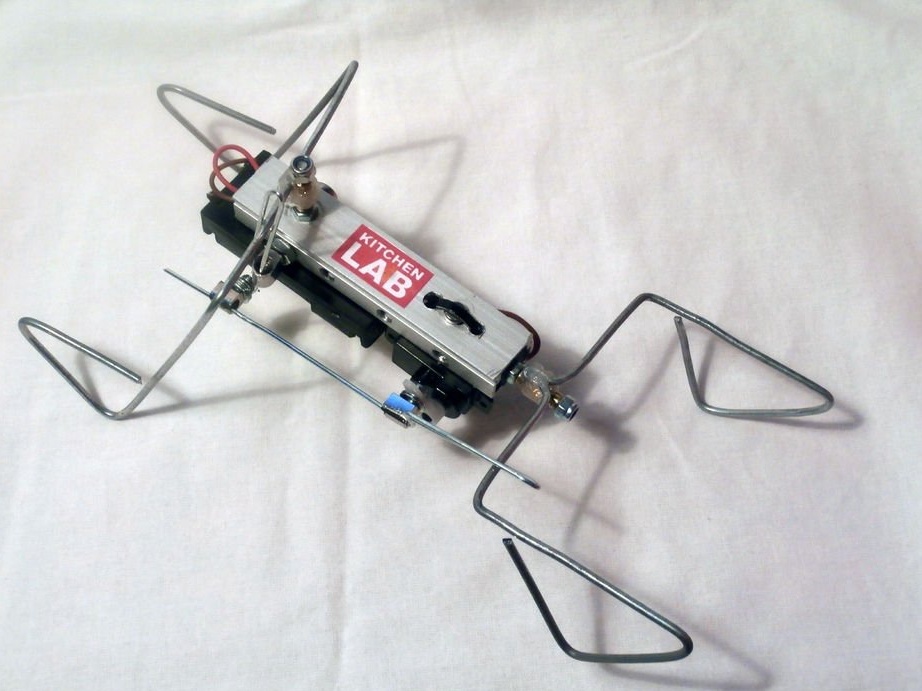
Kamusta sa lahat! Pinukaw ako upang lumikha ng aking BEAM robot, sapat na ang nakikita ko sa mga single-engine at twin-engine na kababalaghan ng mga robotics sa Internet. Ang ideya ay upang lumikha ng isang robot na naglalakad, naglalakad sa parehong paraan tulad ng 1- o 2-motor na mga BEAM-walker. Matapos ang maraming mga hindi matagumpay na mga eksperimento, ginawa ko ang nais ko!
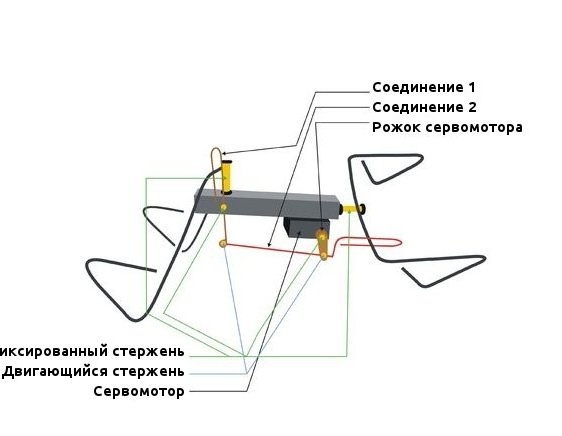
Hakbang 1: Ang Mekanismo
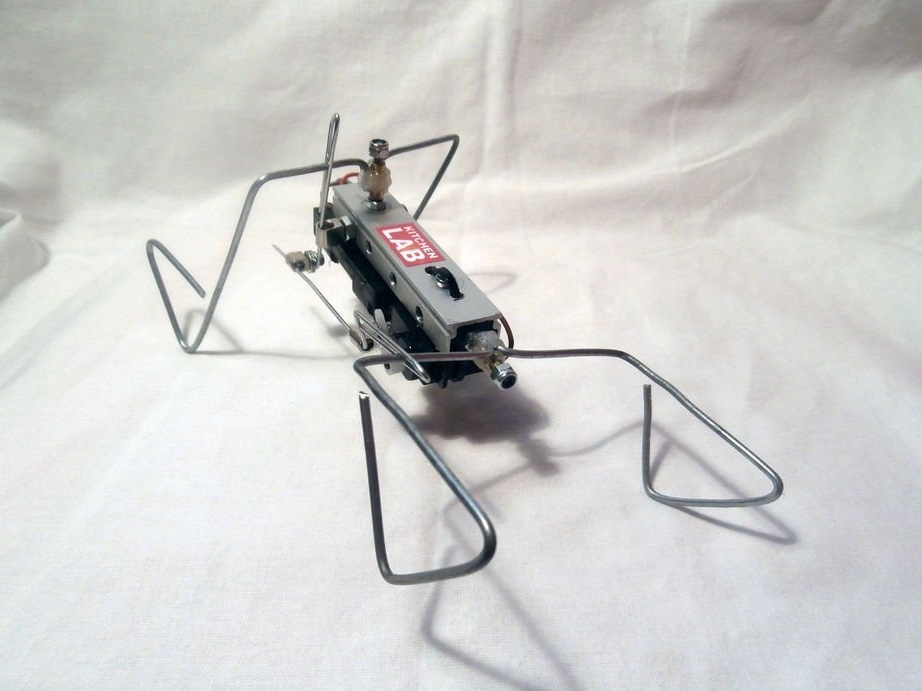
Hakbang 2: Mga Kinakailangan na Mga Bahagi

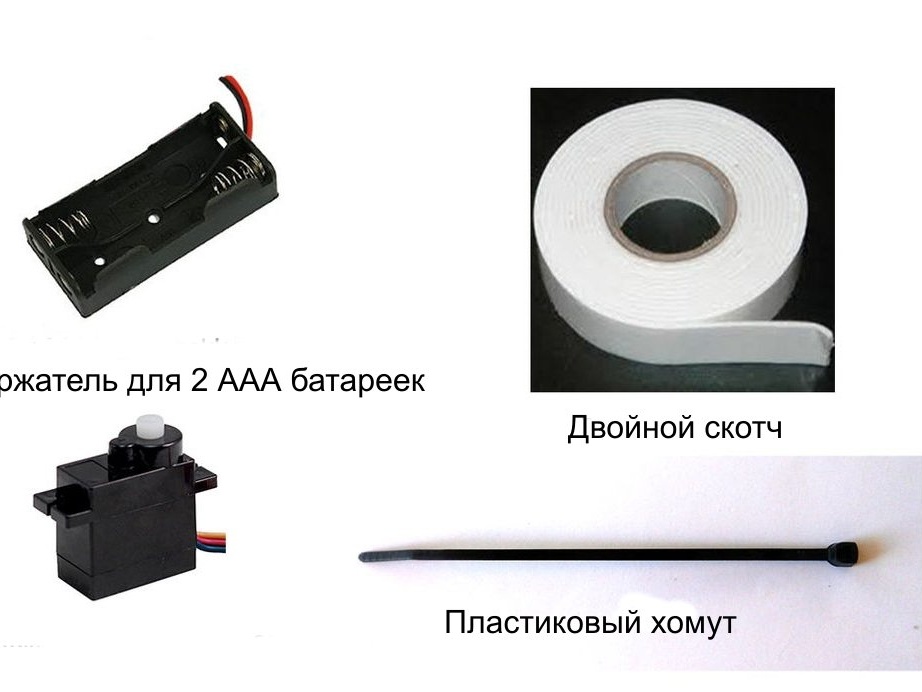



(1x) patuloy na servo ng pag-ikot
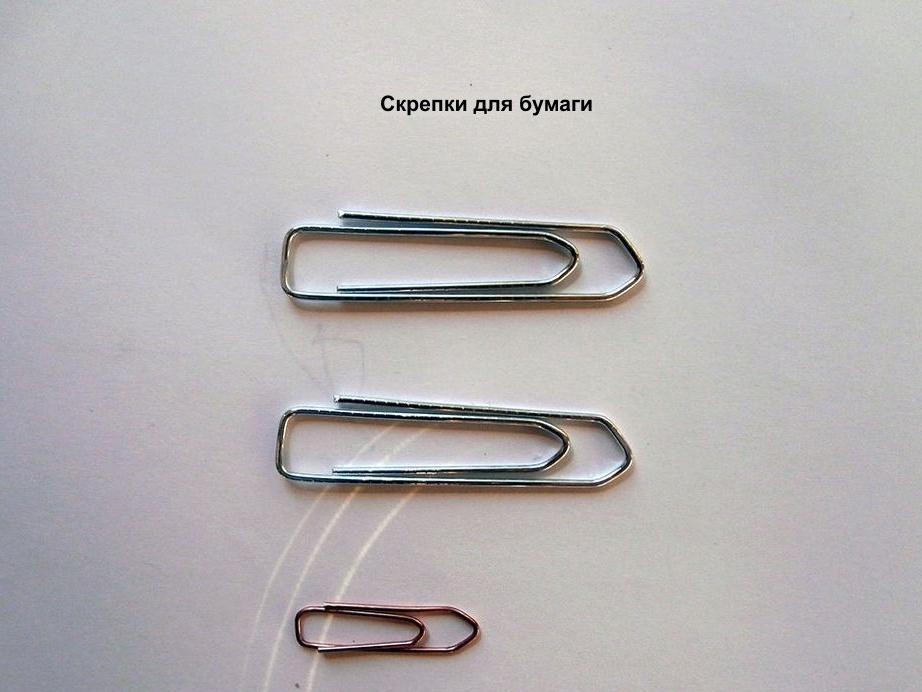
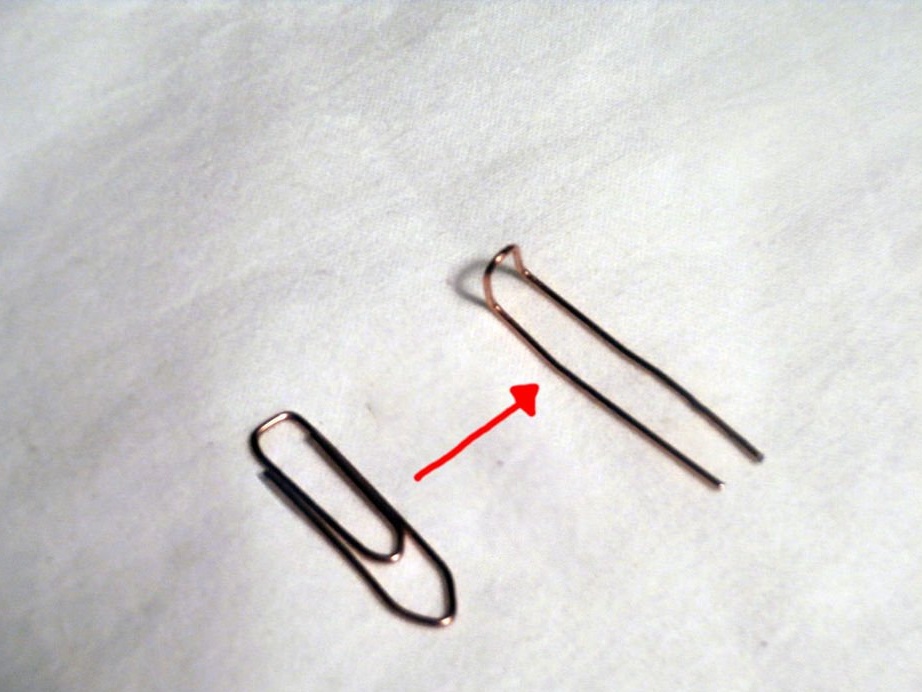
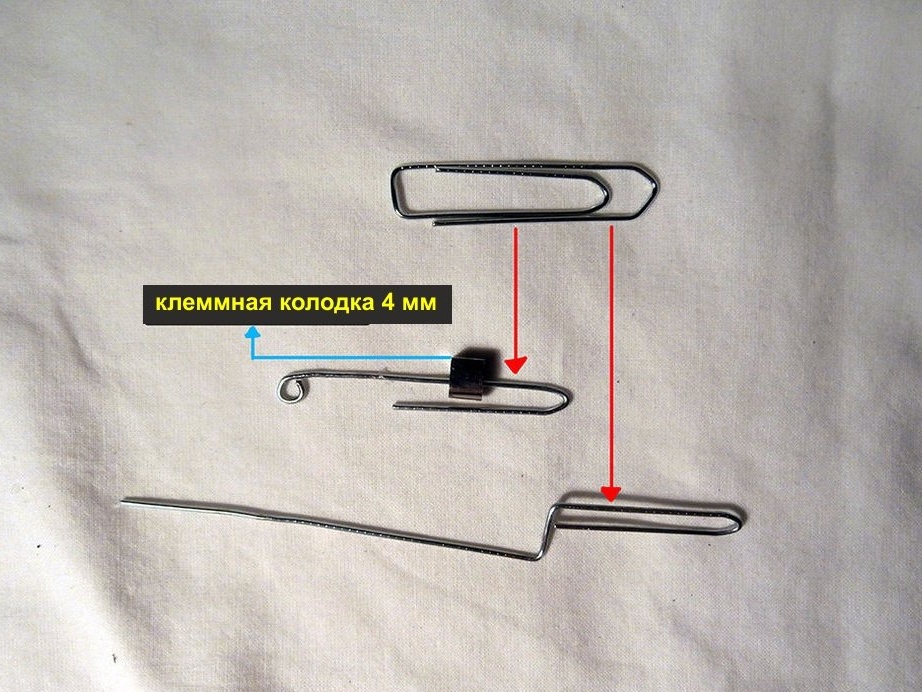
(2x) malaking mga clip ng papel
(1x) maliit na clip ng papel
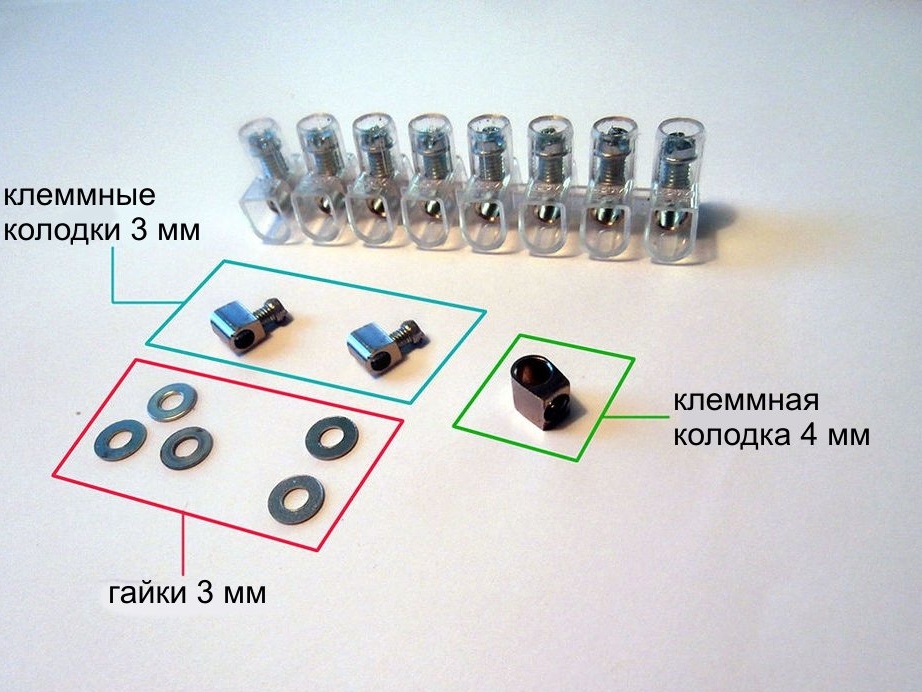
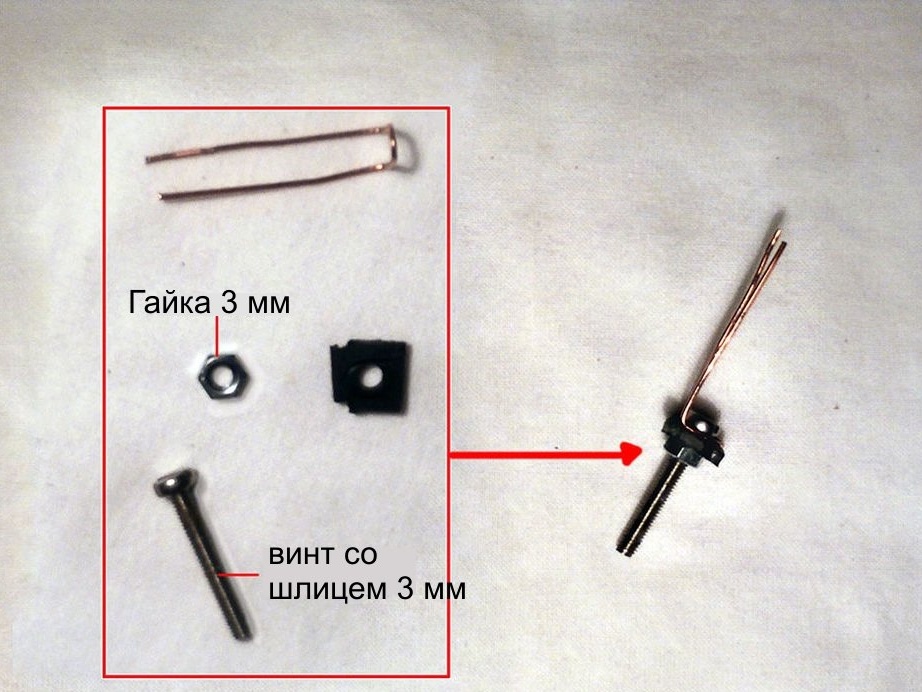
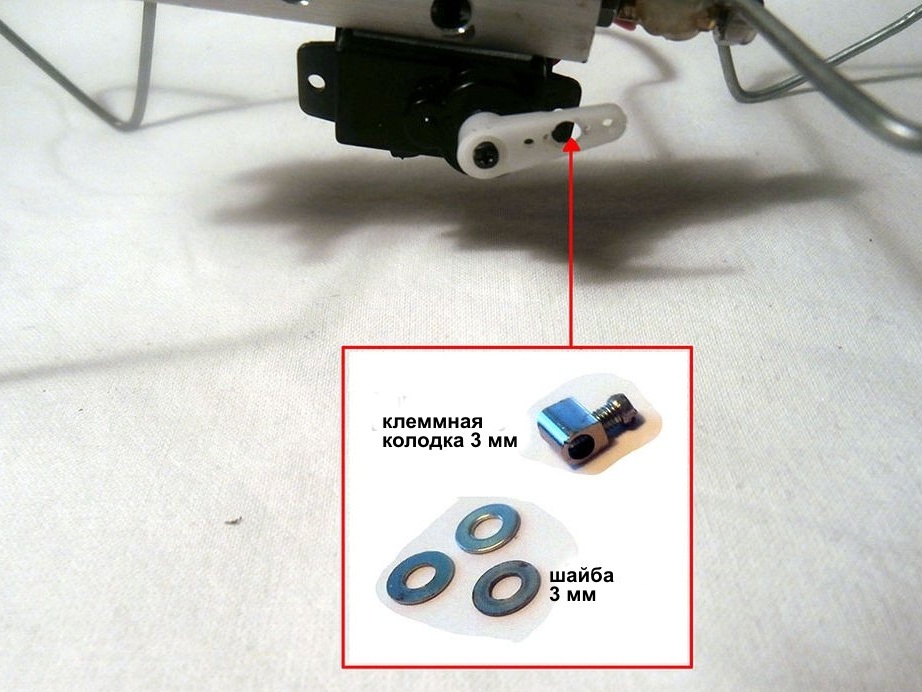
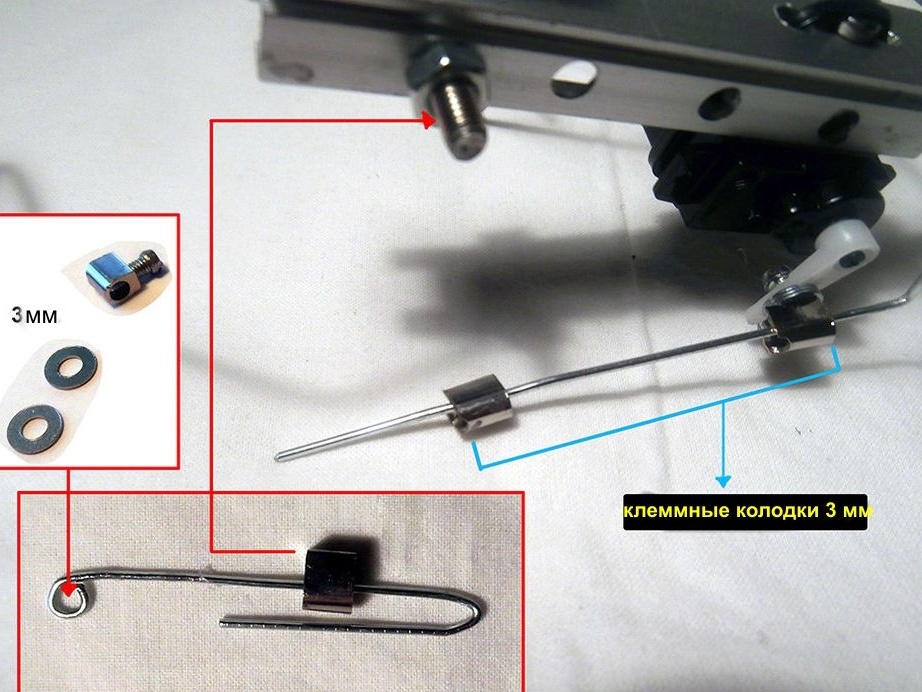
(2x) mga bloke ng terminal (3mm)
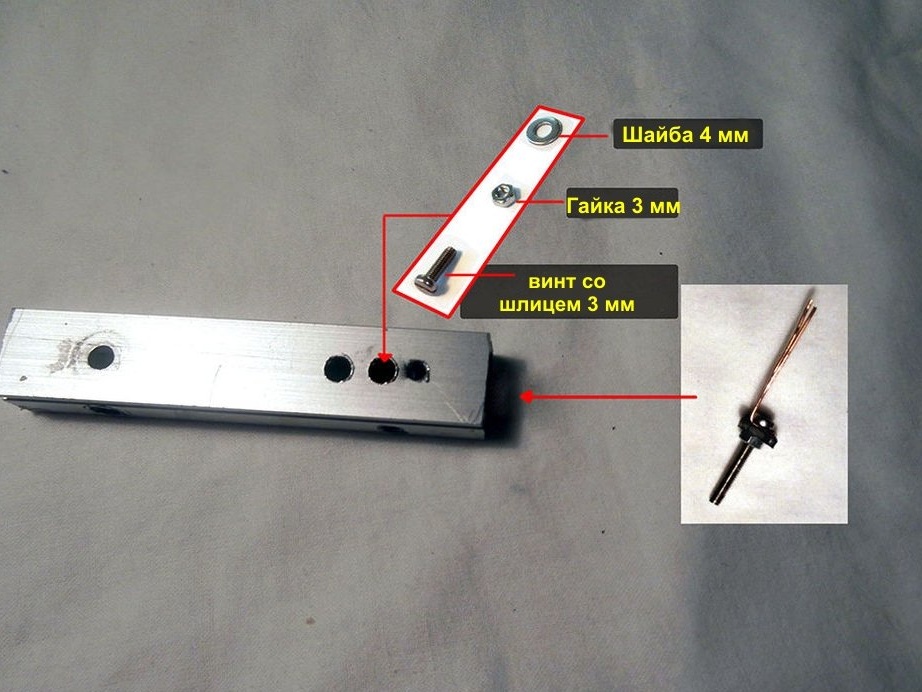
(1x) mga bloke ng terminal (4mm)
(1X) Ginamit na bloke ng profile ng aluminyo
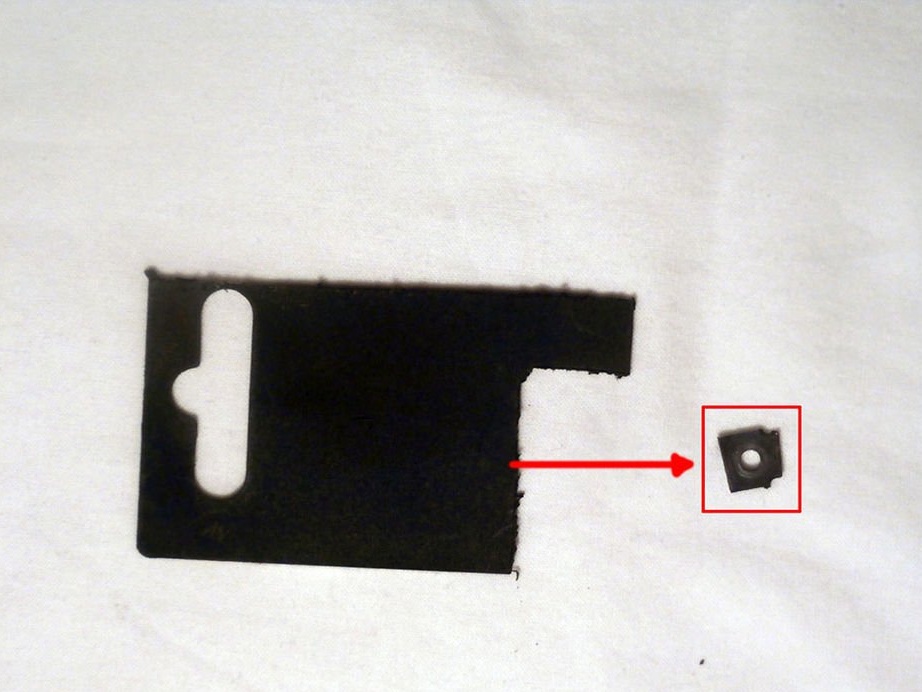
(1X) piraso ng plastik
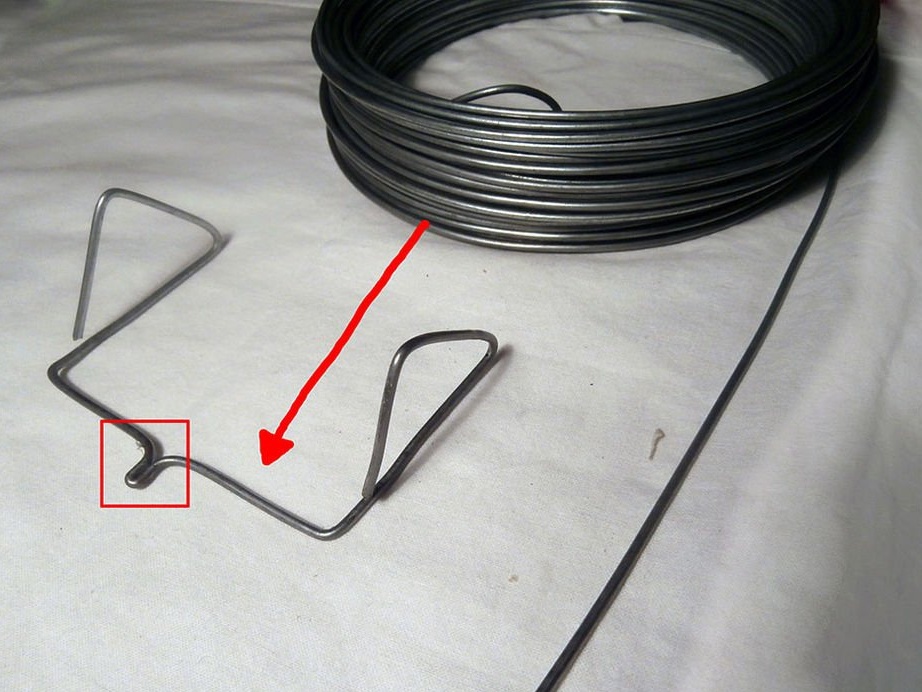
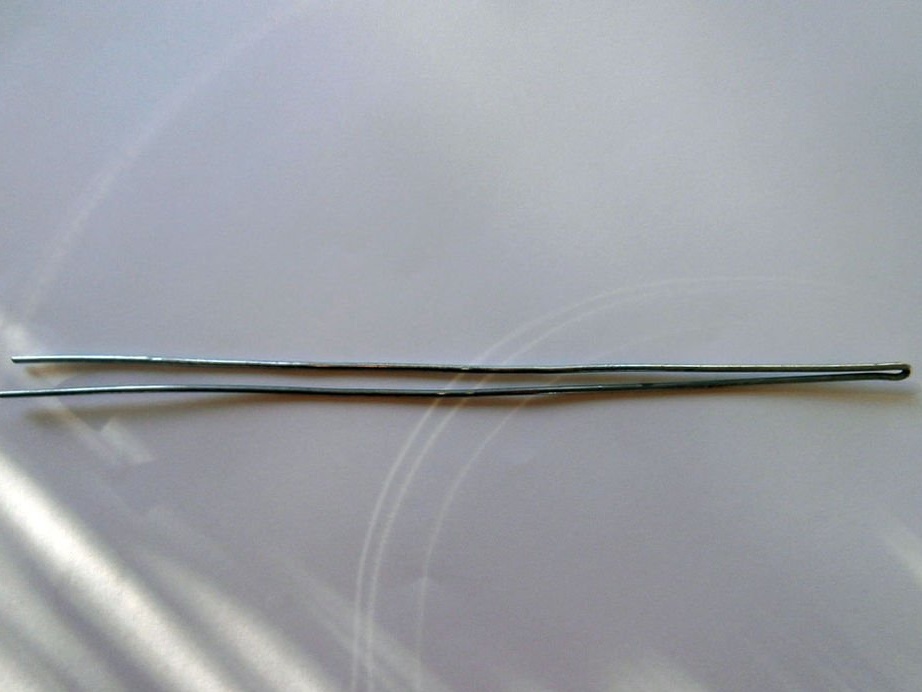
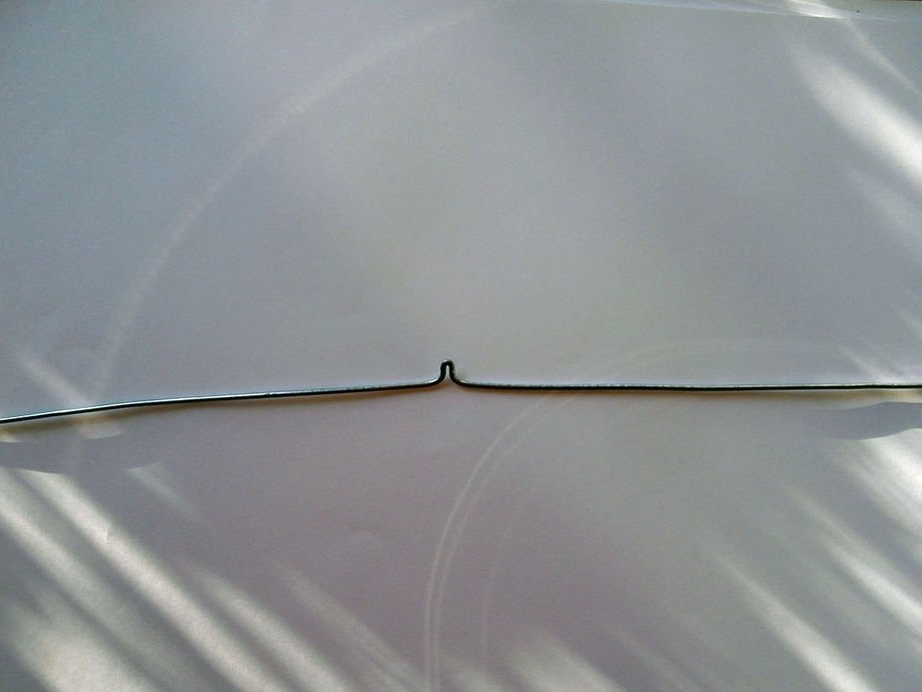
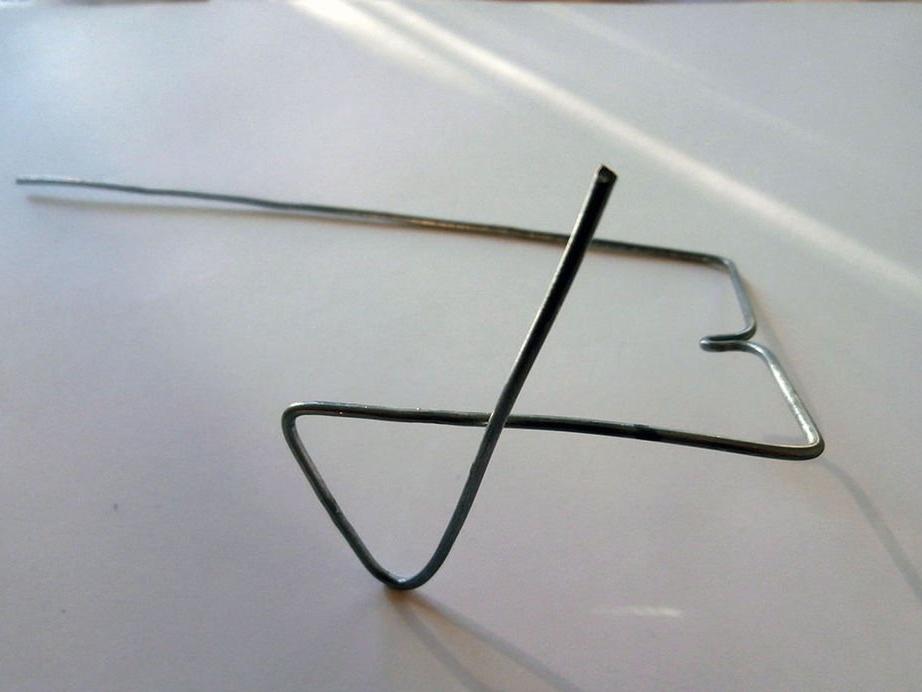
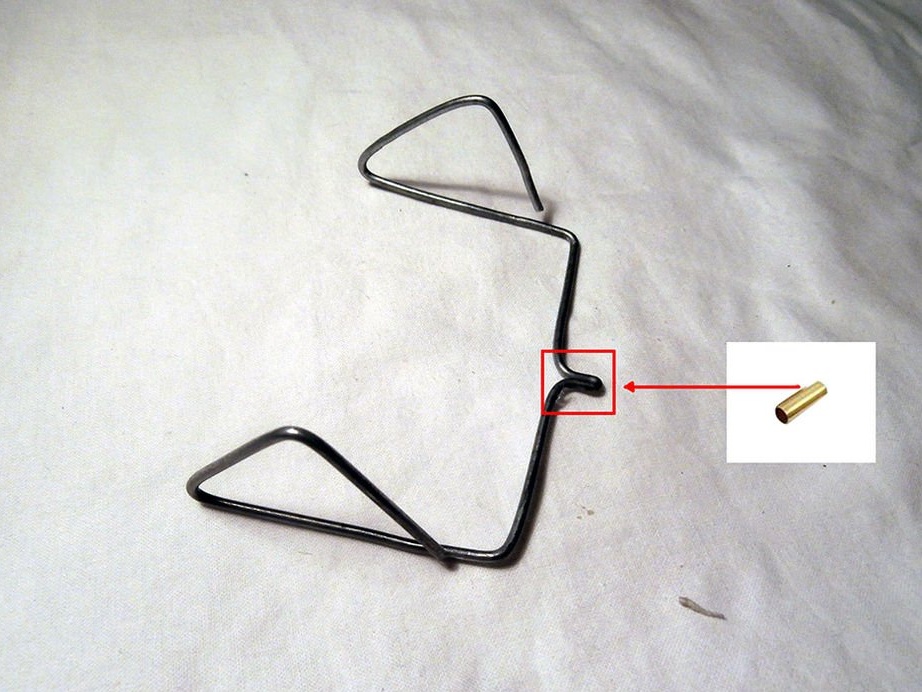
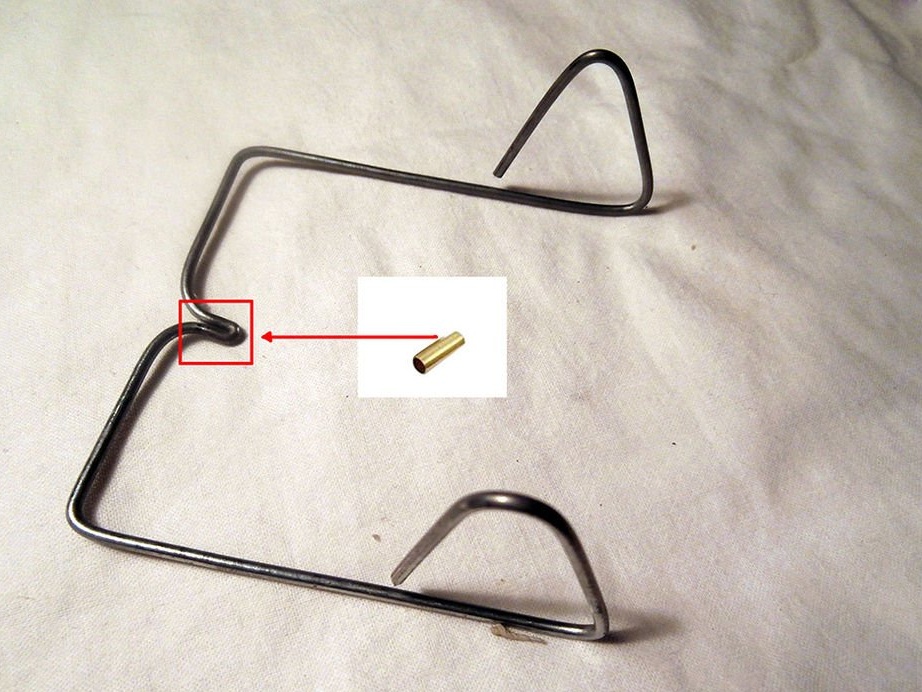
Mga wire na bakal (2 mm)
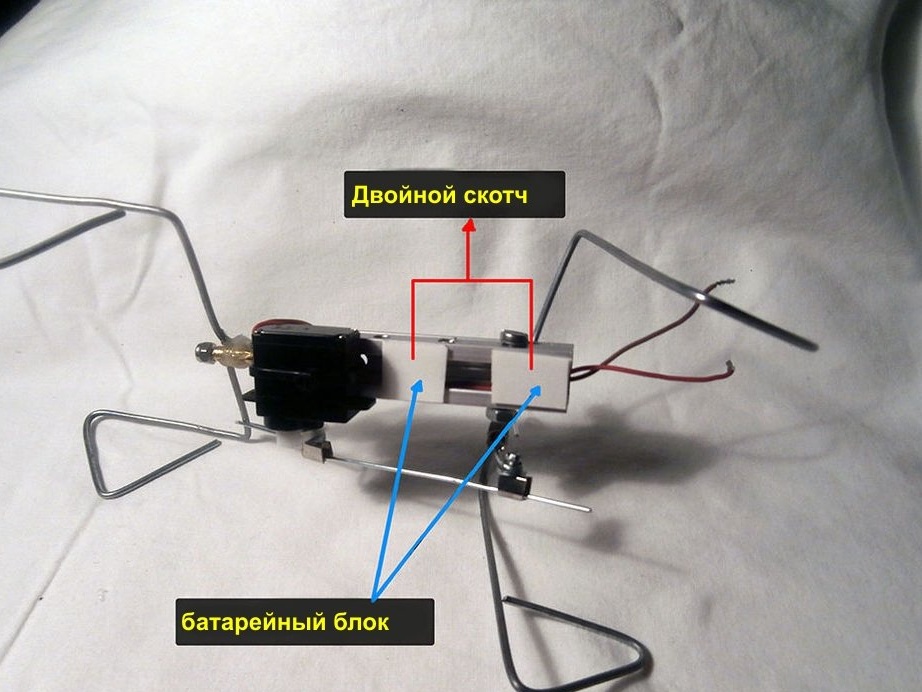
Dobleng malagkit na tape
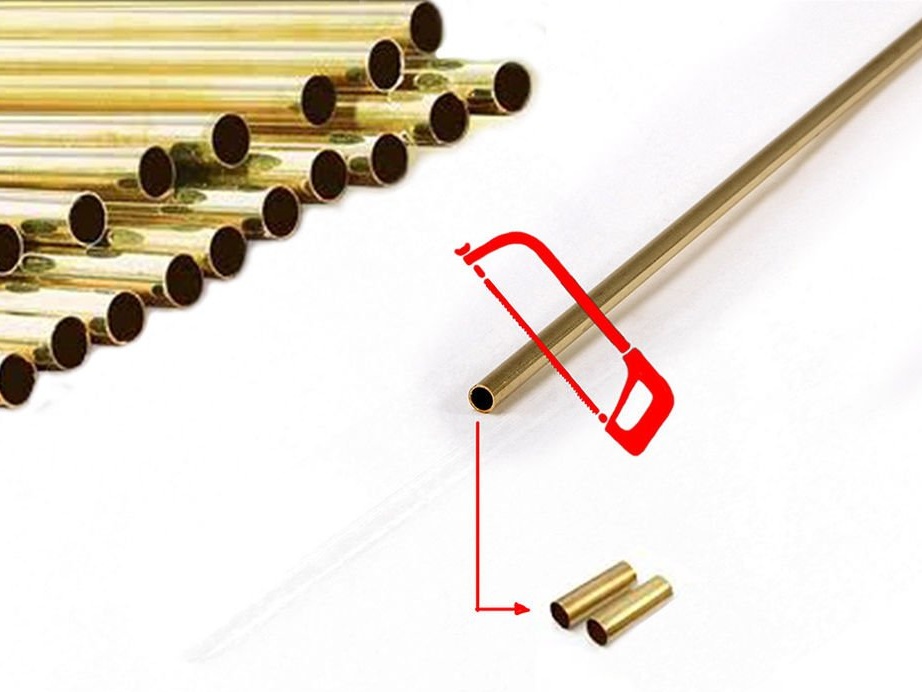
Tube ng tanso
(1X) maliit na salansan
(1X) baterya pack (2 x AAA)
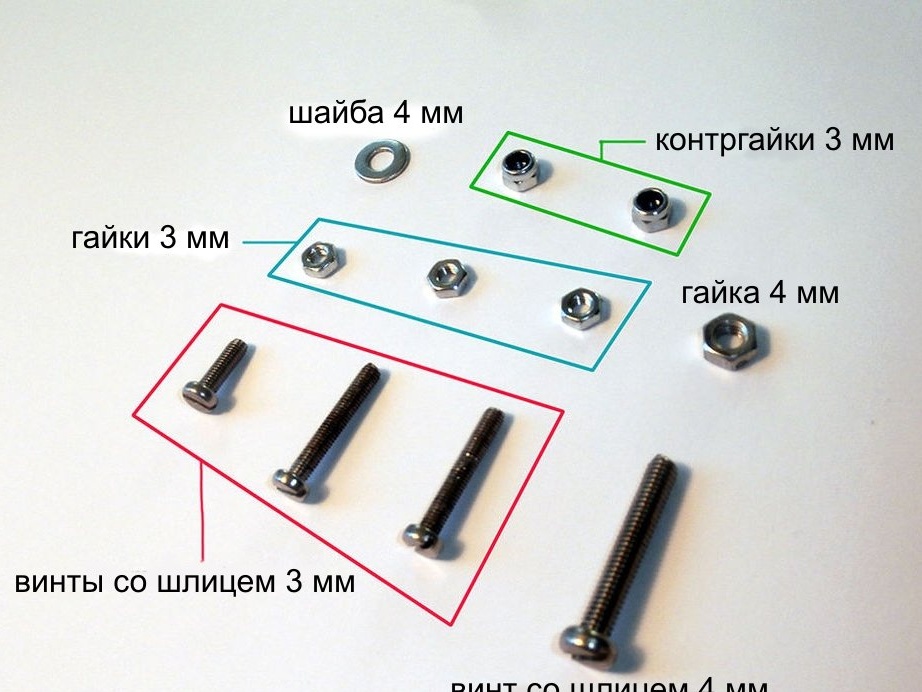
(2X) mga locknuts (3 mm)
(3X) nuts at screws (3 mm)
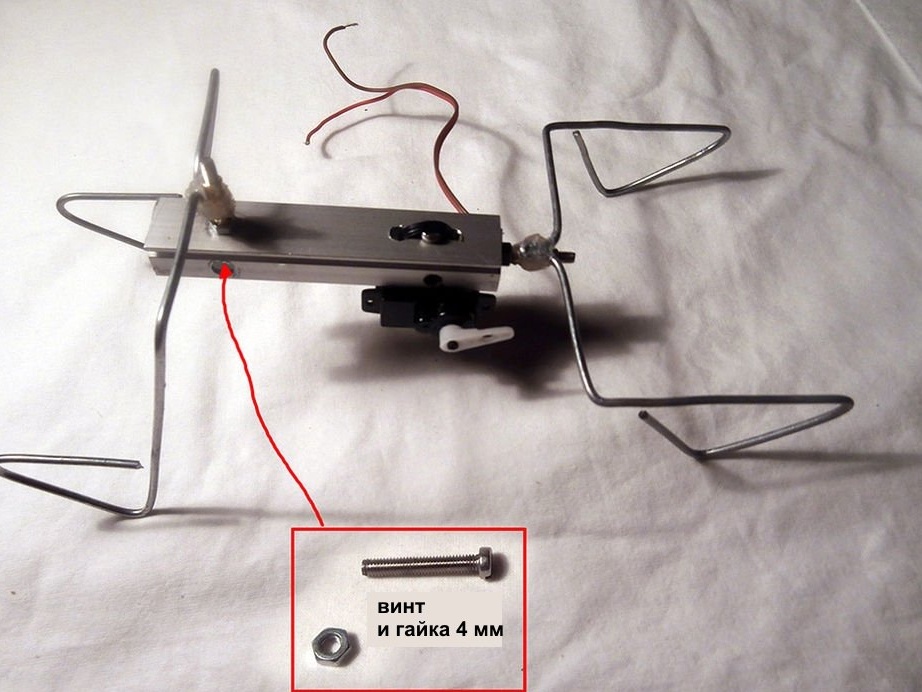
(1x) nuts at screws (4 mm)
(5x) tagapaghugas (3mm)
(1X) tagapaghugas (4mm)
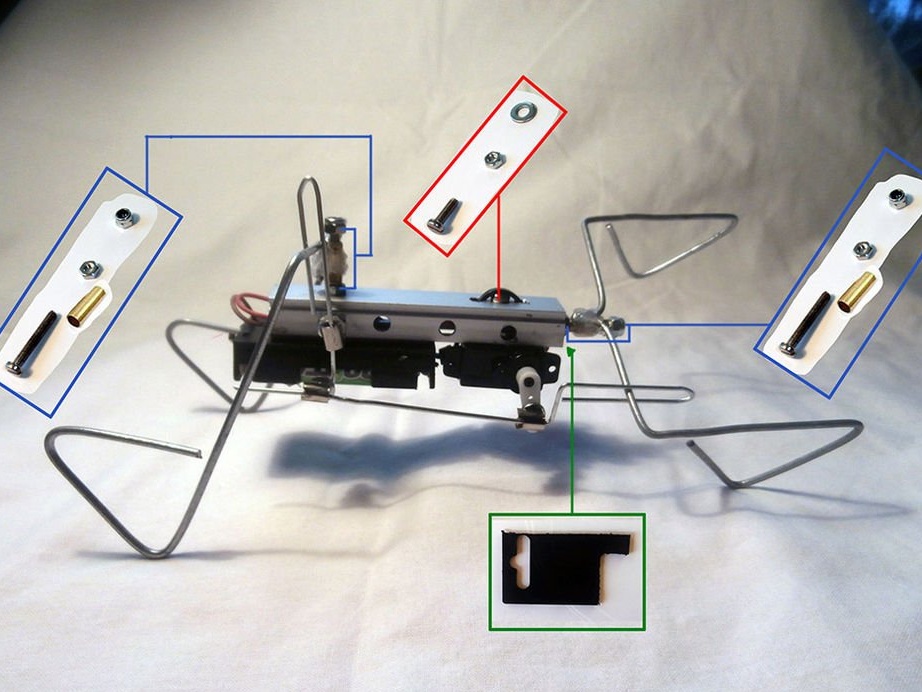
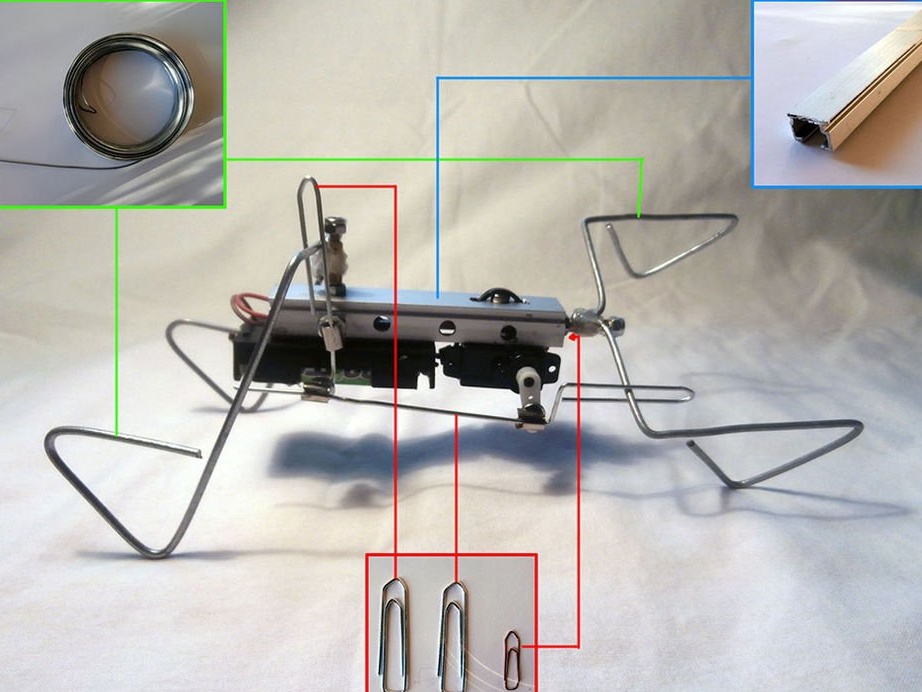
Hakbang 3: Pagtitipon ng mga Bahagi
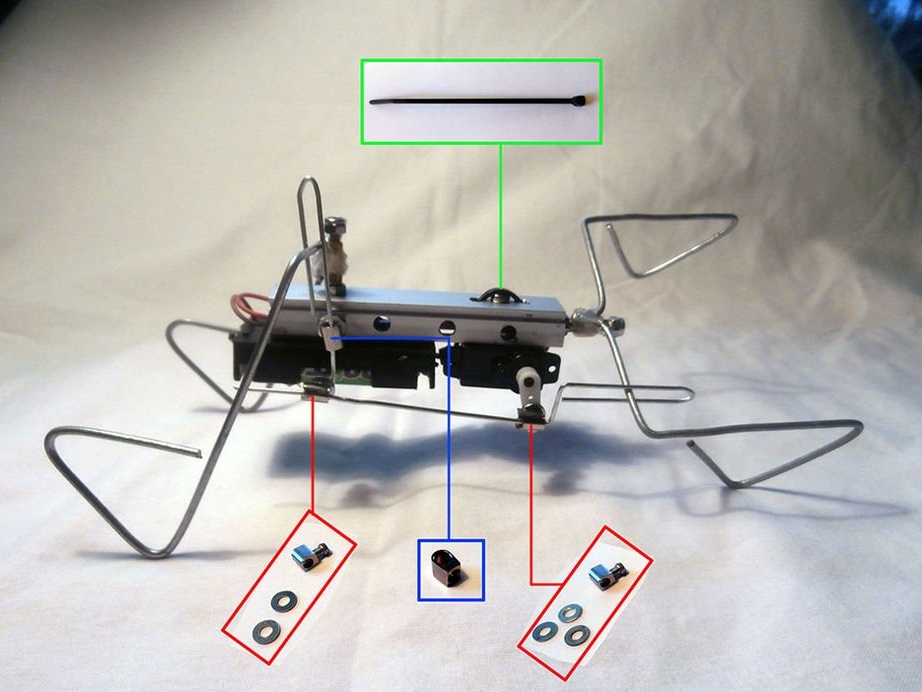
Hakbang 4: Mga tool
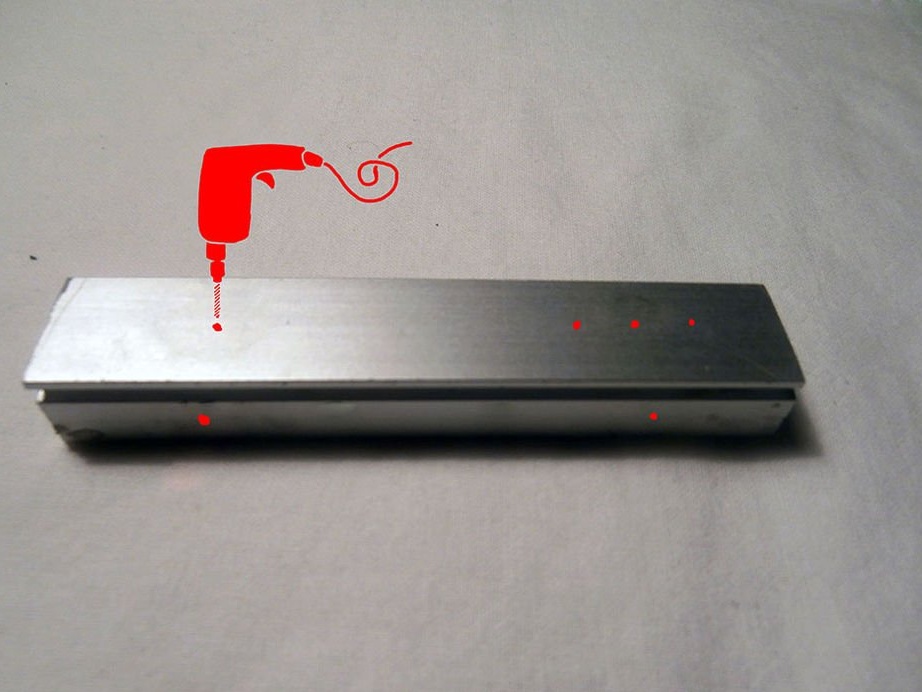
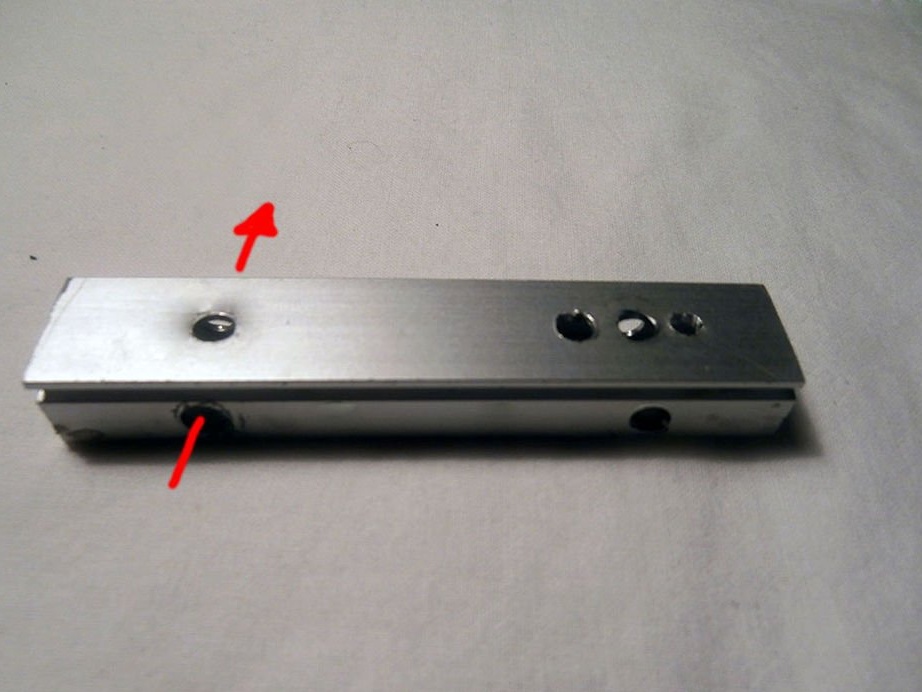
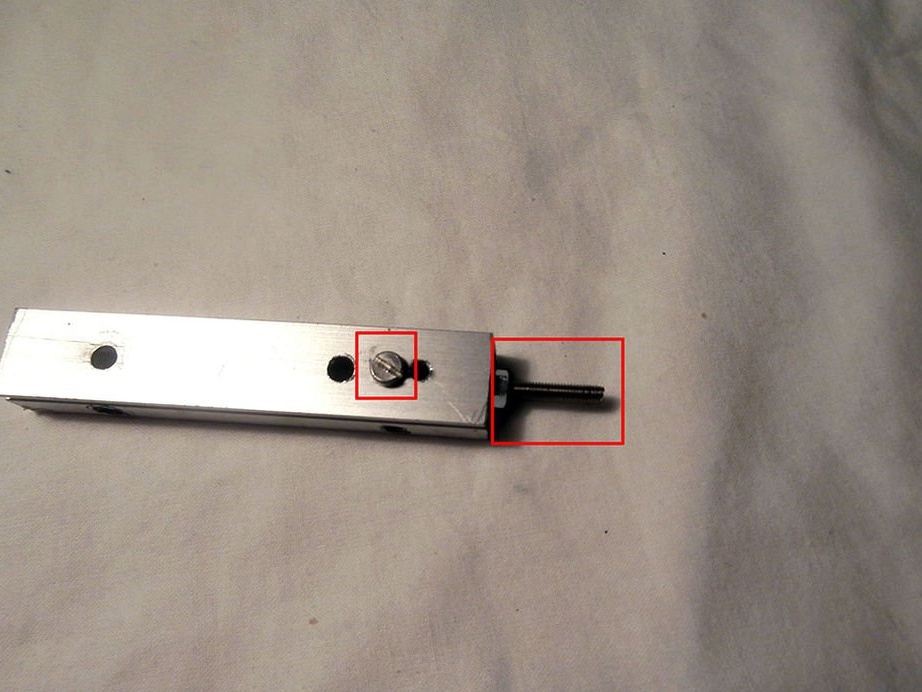
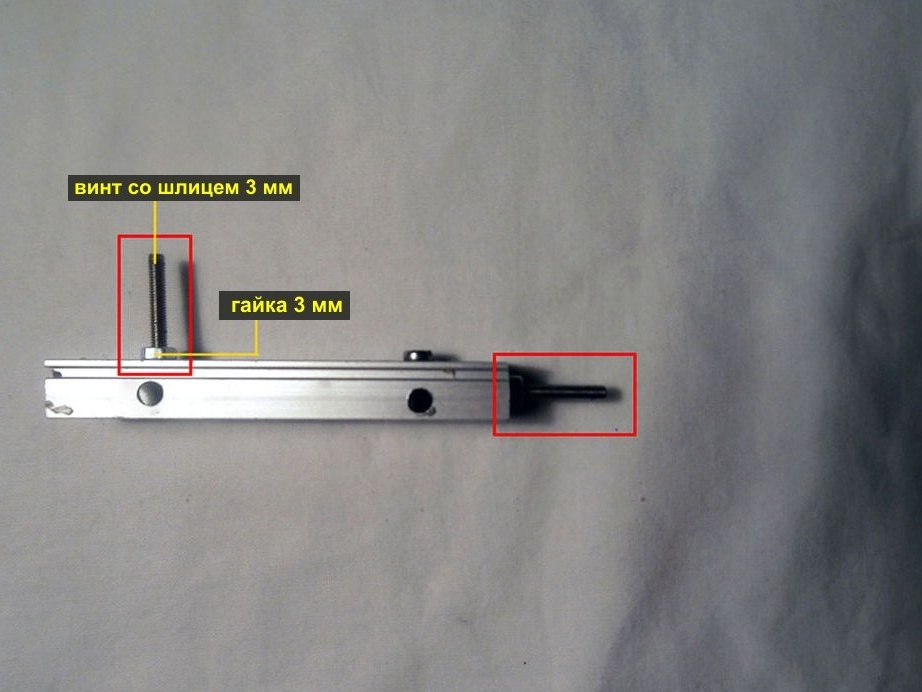
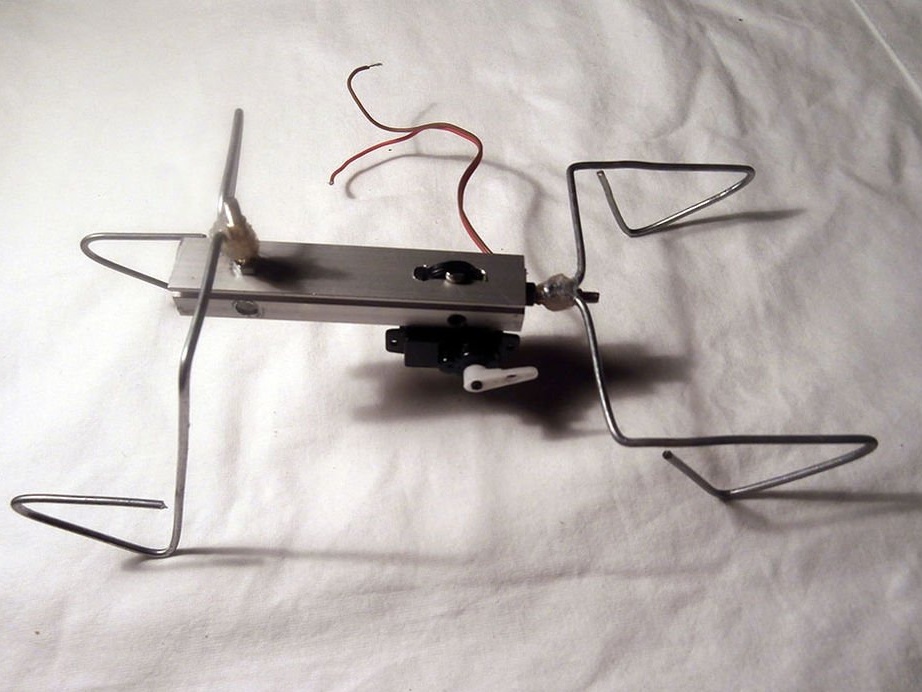
Hakbang 5: Pabahay


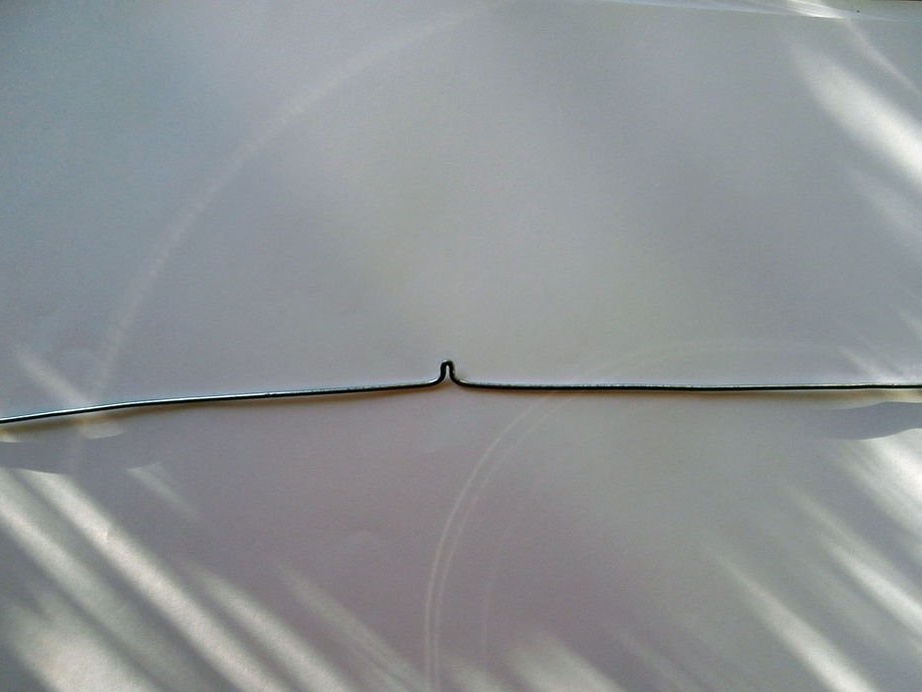
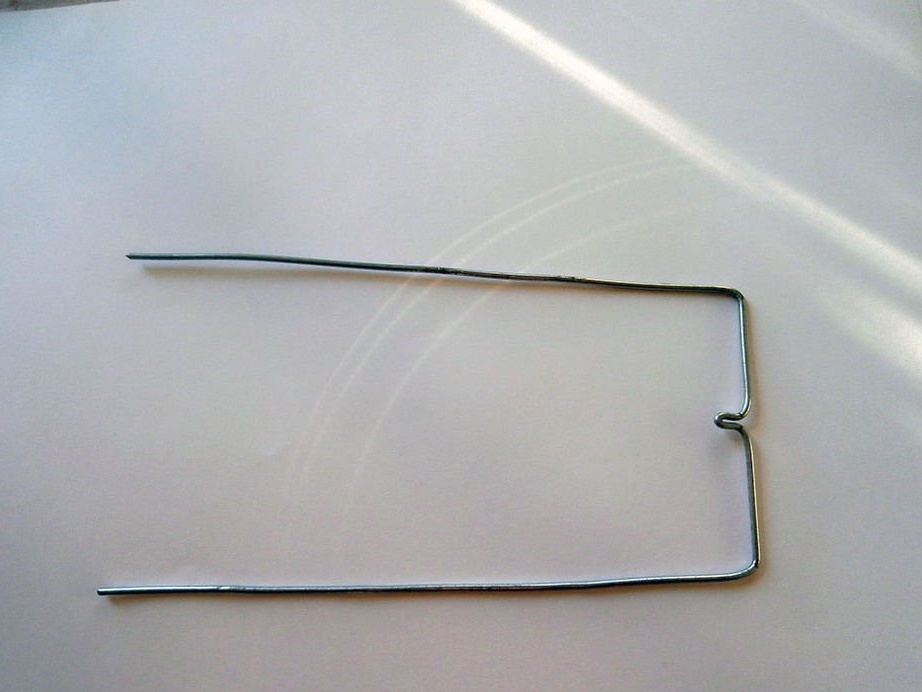
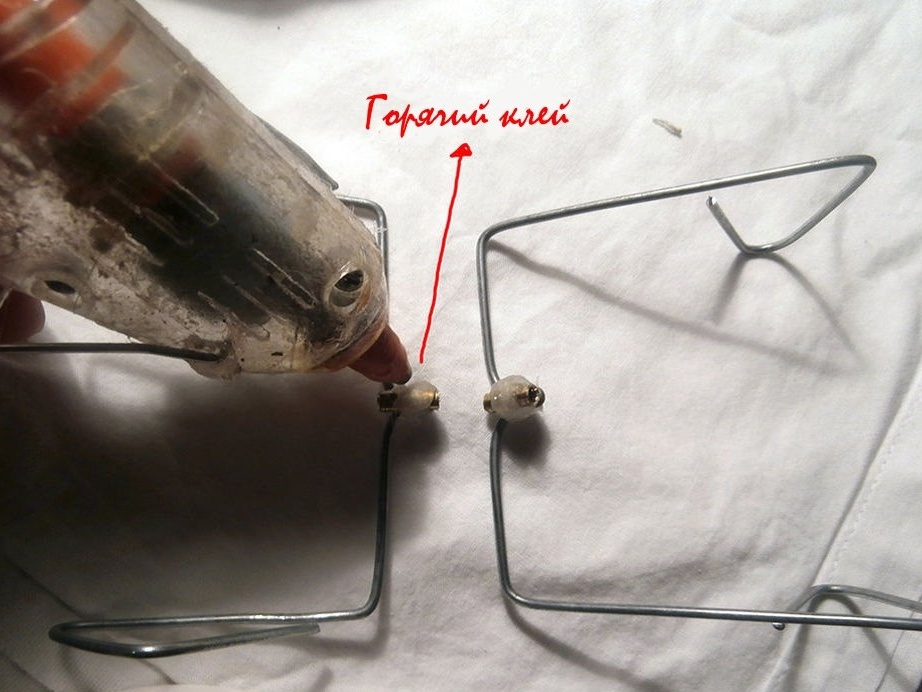
Hakbang 6: harap binti
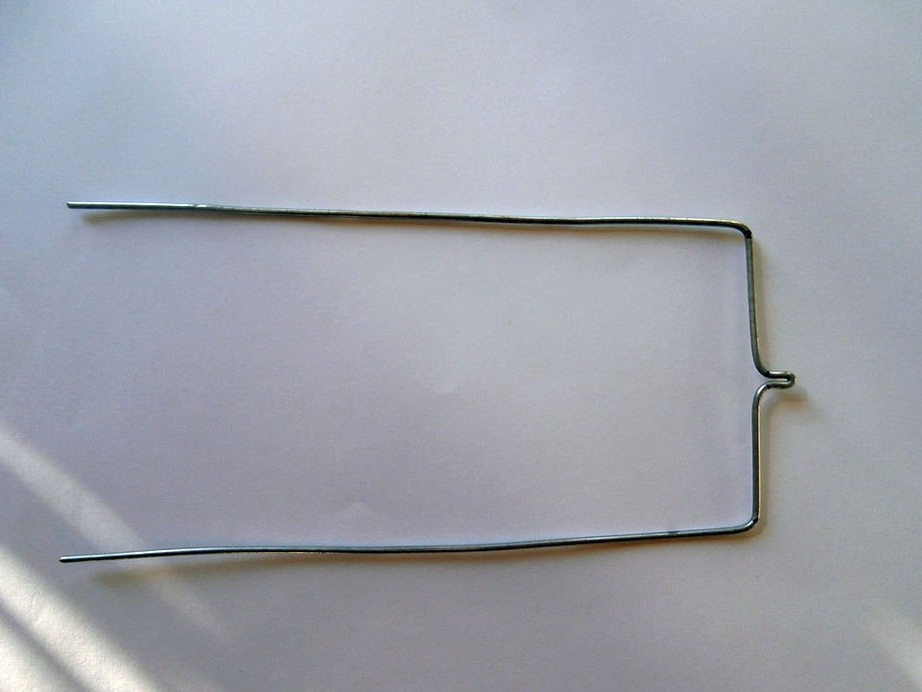
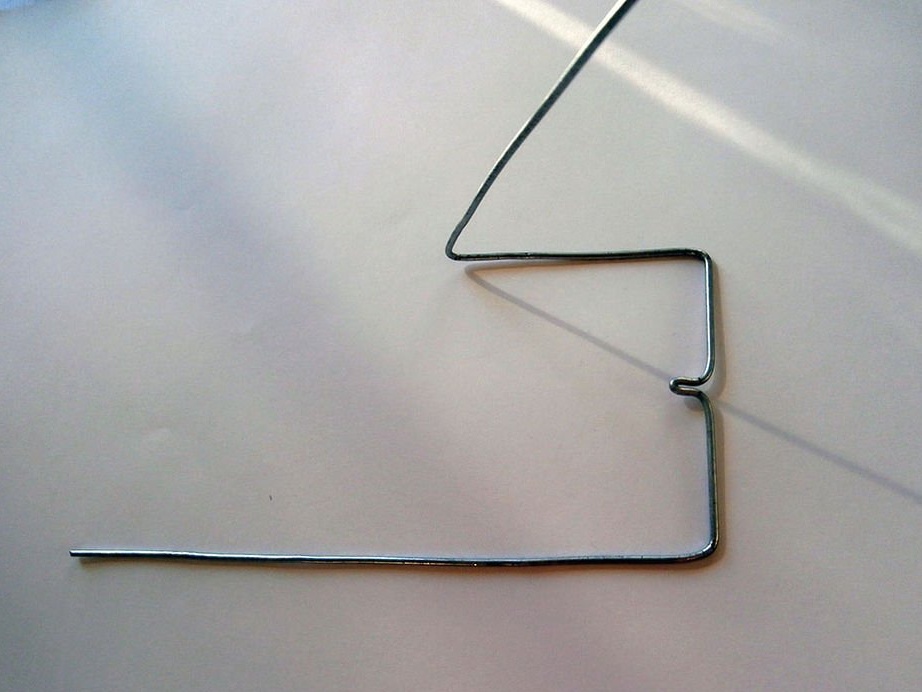
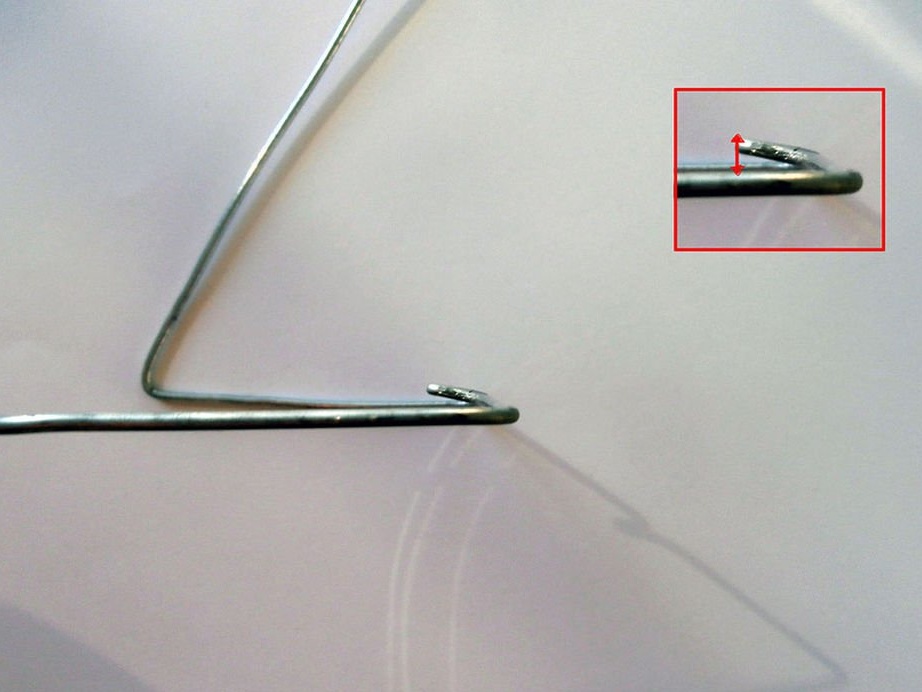
Hakbang 7: Mga paa ng Hind
Hakbang 8: Paglakip sa Talampakan
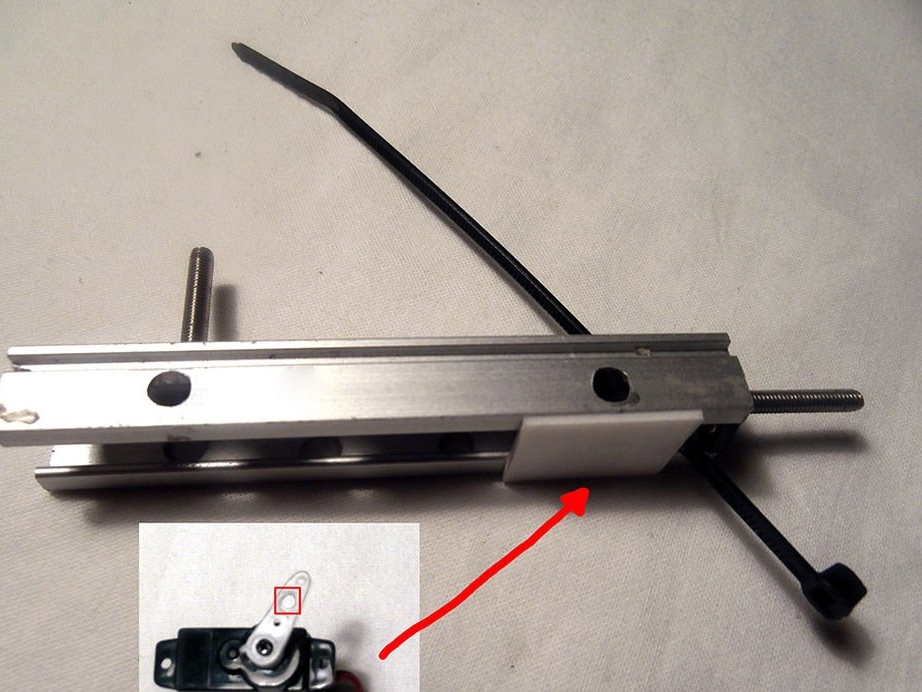
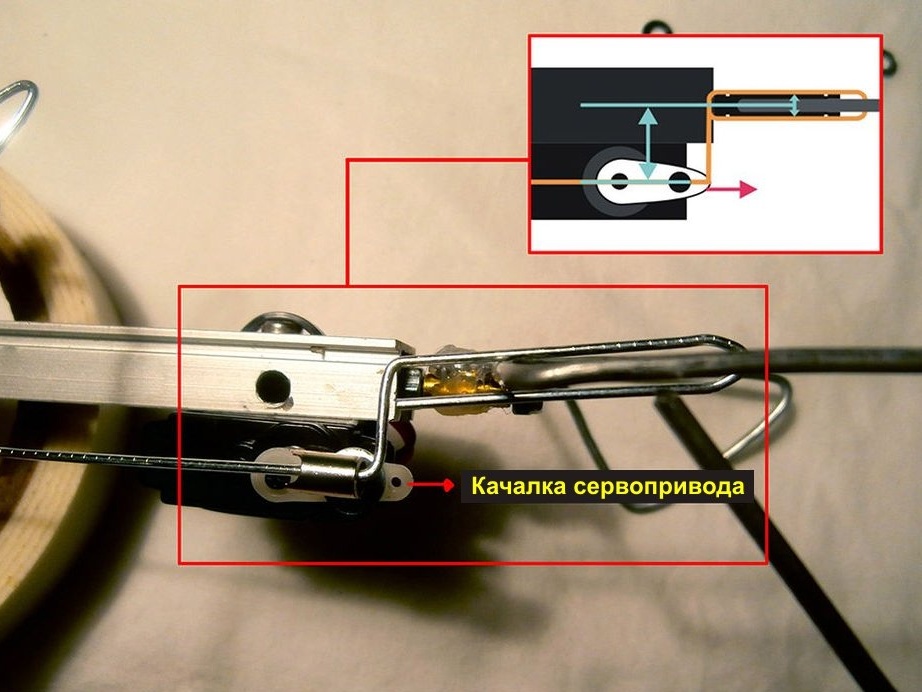
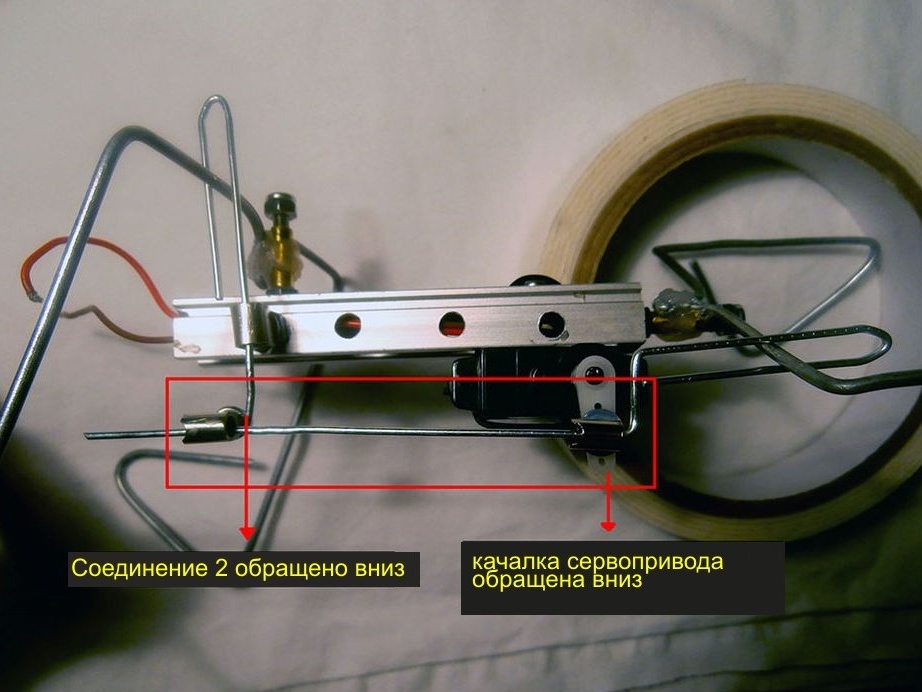
Hakbang 9: Clutch
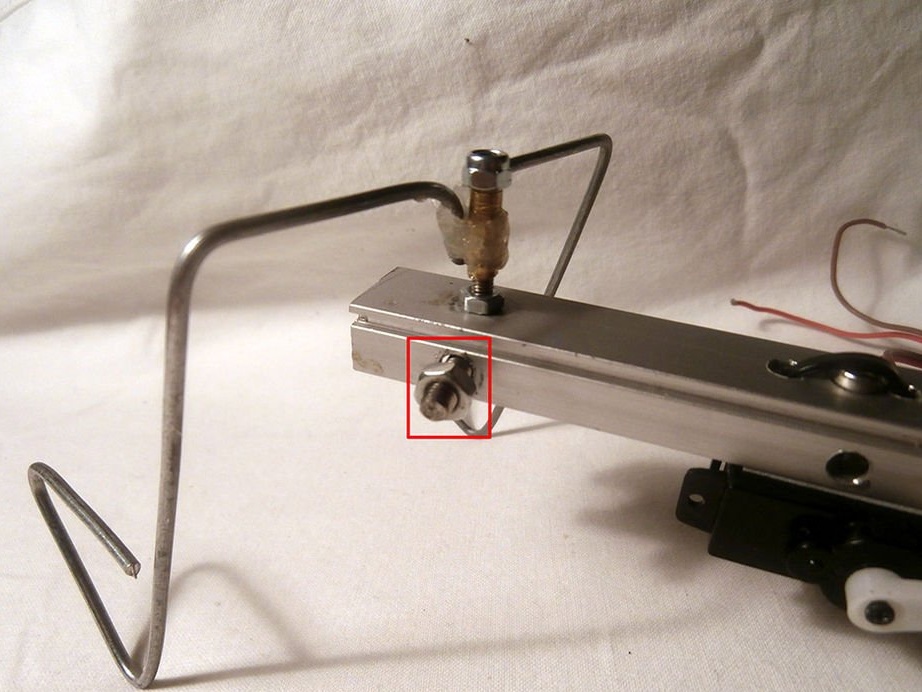
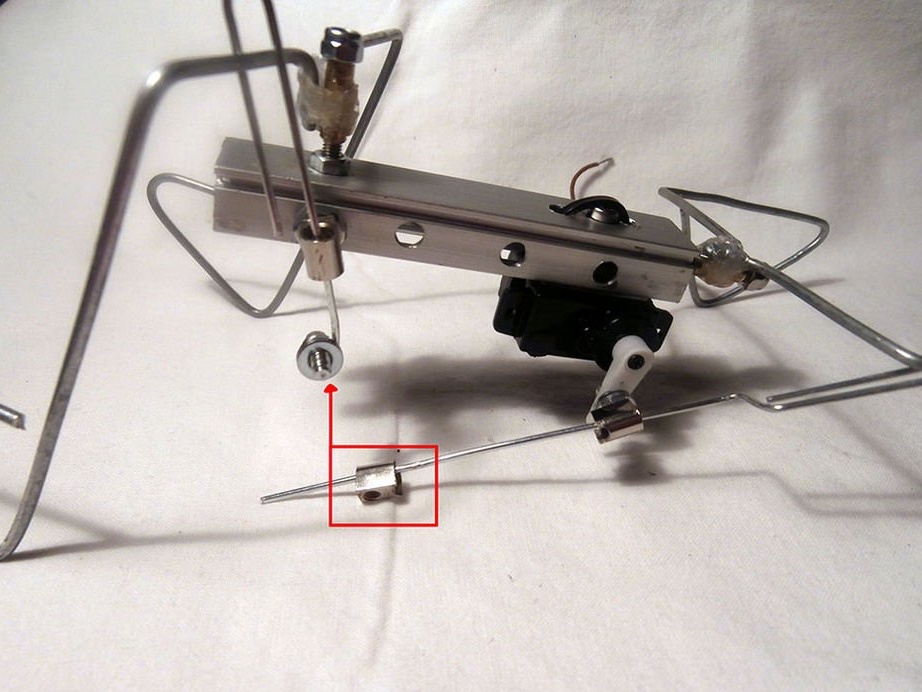
Hakbang 10: Clutch Mount
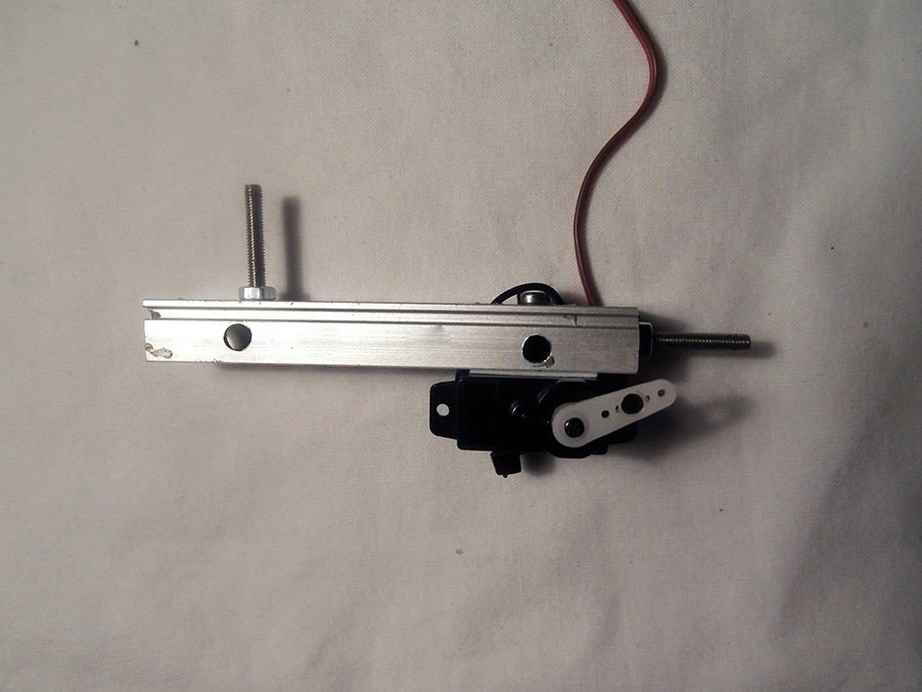
Hakbang 11: ang pangwakas na pagpindot
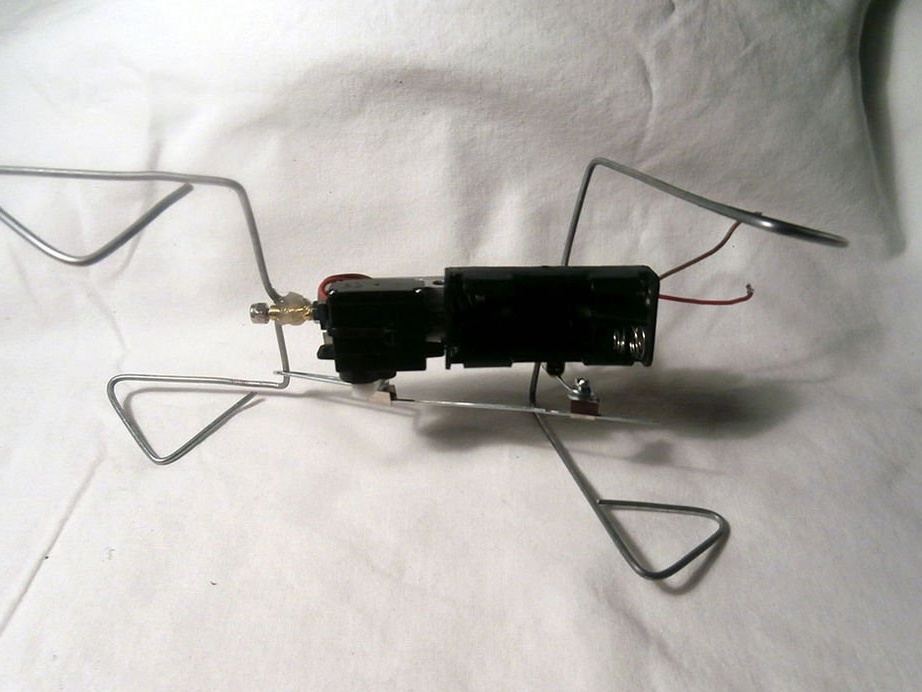
Sa huli, i-wire lamang ang servo at ang mga baterya, at ang robot Ang Owl ay magsisimula ng isang paglalakbay sa paligid ng iyong bahay :)