

Ang mga pultoid ay tinatawag na tulad ng mga robot na maaaring kontrolado nang malayuan gamit ang remote control. Halimbawa, maaaring magamit ang isang remote control sa TV para sa mga layuning ito. Ang pangunahing gawain na itinakda ng may-akda ang kanyang sarili sa paggawa ng tulad ng isang robot ay ang pagiging simple ng pagpupulong nito. Itinuturing ang robot hindi nangangailangan ng paggawa ng isang naka-print na circuit board, ang pag-install ay napaka-simple at nangyayari lamang sa karton.

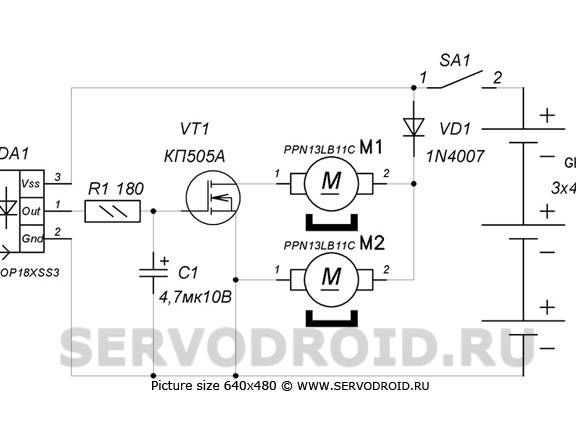
Electronic Ang circuit ng robot ay binubuo lamang ng apat na sangkap: isang diode, isang transistor, isang photodetector at isang kapasitor. Para sa paggawa ng mekanikal na bahagi, kakailanganin din ang isang minimum na mga materyales, halimbawa, isang CD-ROM ang ginagamit upang gawin ang kaso.
Ang isang robot na ginawa sa ganitong paraan ay mauunawaan ang isang koponan lamang. Ito ay nagkakahalaga ng pagpindot sa anumang pindutan sa control panel at ang robot ay magsisimulang lumiko. Kung patuloy mong hawakan ang pindutan, ang anggulo ng pag-ikot ay magiging mas malaki, bilang isang resulta, maaaring i-on ng robot ang 360 degree.
Aparato ng Robot
Ang isang compact disk ay ginagamit bilang batayan para sa paggawa ng robot. Tulad ng para sa mga elemento ng kuryente, nakakabit sila gamit ang M2 bolts. Ang electronic board, pati na rin ang kompartimento ng baterya, ay nakalakip gamit ang tape.
Ngayon tungkol sa mga makina, matatagpuan ang mga ito sa isang anggulo at ang kanilang mga shaft ay nagpapahinga laban sa kalsada. Kaya, hindi na kailangang hiwalay na gumawa ng mga gulong. Ang mga bolts ay ginawang gamit ang mga frame na gawa sa isang linya ng paaralan.
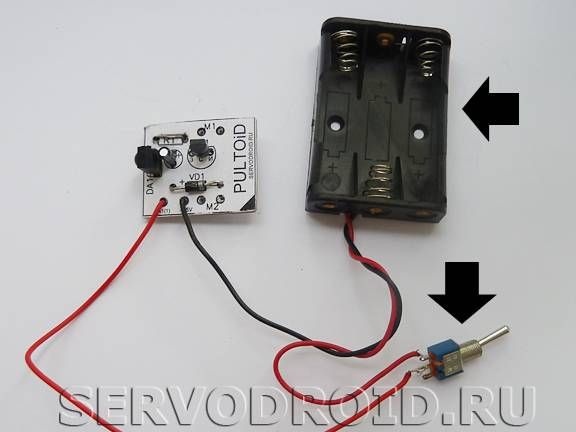
Tatlong "maliit na daliri" na baterya ang nagpapakain sa robot, naka-install ang mga ito sa isang espesyal na kaso. Sa kabuuan, ang suplay ng kuryente ay gumagawa ng 4.5 V.
At sa wakas, ang photodetector, isa lamang ito, ito ang uri ng TSOP. Tumatanggap ito ng mga modulated signal mula sa anumang remote control, salamat sa kung saan maaaring kontrolin ang robot.
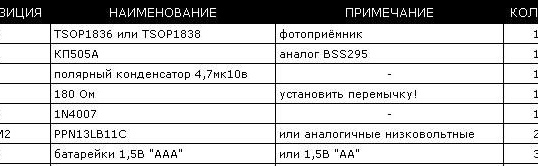
Mga materyales at tool para sa pagmamanupaktura:
- mga kurbatang naylon;
- uri ng photodetector TSOP1836;
- isang patlang na epekto transistor (KP505A);
- isang compact disk;
- Fular para sa mga baterya sa tatlong mga seksyon;
- tatlong "maliit" na baterya;
- tagapamahala ng plastik;
- mga tornilyo para sa paglakip sa frame;
- mga wire at lumipat (tumawid sa uri).
Proseso ng paggawa
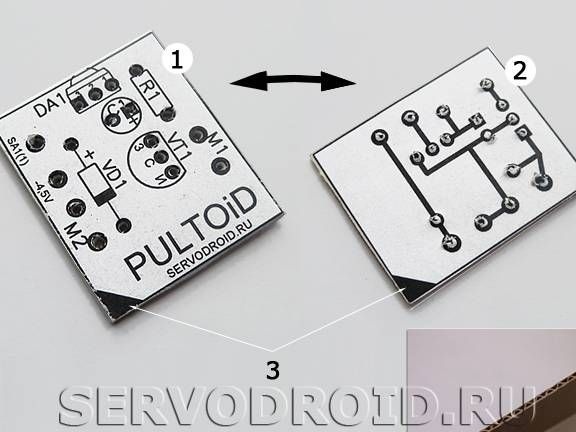
Unang hakbang. Disenyo ng PCB
Upang makagawa ng isang nakalimbag na circuit board, kailangan mo munang mag-print ng isang guhit sa papel. Dapat kang makakuha ng dalawang larawan, sa isang pagguhit ng pag-install, at sa kabilang panig ng board. Sa kabuuan, ang lupon ay binubuo ng tatlong elemento, sa gitna magkakaroon ng isang corrugated cardboard na nakadikit na may papel sa opisina sa magkabilang panig. Upang i-glue ang board, inirerekomenda na gumamit ng isang dry glue stick.
Hakbang Dalawang Pag-install ng mga bahagi ng radyo
Kapag nag-install ng mga elektronikong sangkap, mahalaga na huwag kalimutan o putulin ang nakausli na mga gilid ng mga contact. Kasunod nito, sila ay baluktot, at sa gayon ay lilikha ang isang de-koryenteng circuit. Ang lahat ng mga elemento ay konektado sa pamamagitan ng paghihinang ayon sa tinukoy na pamamaraan.
Ang Resistor R1 sa circuit ay dapat mapalitan ng anumang jumper. Tulad ng para sa photodetector, ang tamang pagkakasunud-sunod ng koneksyon nito ay ipinapakita din sa larawan.

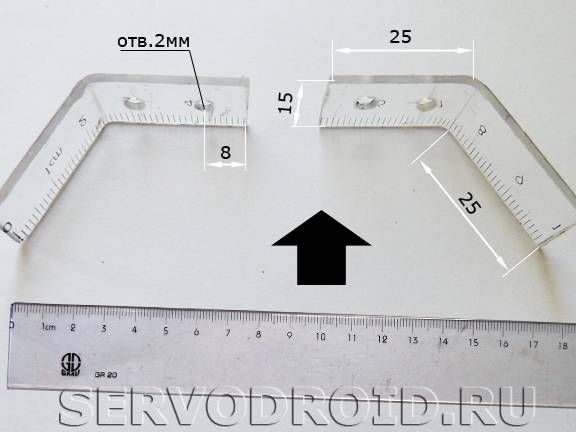
Hakbang Tatlong Pag-install ng Power Frame
Upang mai-install ang mga makina, kakailanganin mong lumikha ng isang power frame. Bilang isang materyal, ang isang tagapamahala ng plastik na paaralan ay gagamitin dito. Dapat itong i-cut sa dalawang bahagi at baluktot tulad ng ipinahiwatig sa larawan. Upang magsimulang yumuko ang pinuno, kailangan mong dalhin ang mainit na paghihinang tip sa bakal sa isang lugar ng pagpapalihis sa layo na halos 2 mm. Gayundin para sa mga layuning ito, maaari kang gumamit ng isang hairdryer sa konstruksiyon. Ang pinuno ay kailangang maayos na baluktot sa isang anggulo ng mga 30 degree.

Matapos malikha ang frame, maaari kang magpatuloy sa pag-install nito. Upang gawin ito, kunin ang CD at 2 mm screws na may mga nuts. Dagdag pa, ang mga butas na may diameter na hindi bababa sa dalawang milimetro ay drilled sa mga tamang lugar, at ang frame ay naayos na may mga screws. Upang ang frame ay hindi madulas, bago i-install ito kailangan mong dumikit ang double-sided tape sa disc.
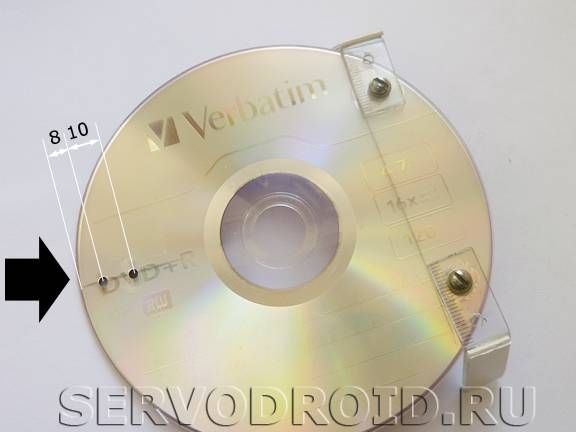
Hakbang Apat Pag-install ng suportang harap
Sa harap ng disc, kailangan mong mag-drill ng dalawang butas at maghanda ng isang naylon screed. Ang laki ng screed ay dapat na 3x150mm. Dapat itong ipasok tulad ng ipinahiwatig sa larawan. Bilang isang resulta, ang nagresultang suporta ay magbabawas ng perpekto sa panahon ng pagpapatakbo ng robot at dumausdos sa kalsada.


Hakbang Limang Pag-install ng engine
Upang maiwasan ang mga shaft ng motor mula sa pagdulas sa kalsada, dapat na ilagay sa kanila ang mga tagapagtanggol. Ang mga ito ay ginawa mula sa gum, na maaaring matagpuan sa mga pastes ng helium pens. Upang mai-install ang mga makina, kailangan mo munang i-glue ang isang piraso ng dobleng panig na suporta sa pipie, pipigilan nito ang pagdulas. Well, pagkatapos ay ang mga makina ay sa wakas naayos na may mga kurbatang naylon.

Hakbang Anim Ang koneksyon ng switch at power supply
Bilang isang mapagkukunan ng kuryente, maaari mong gamitin ang anumang baterya na ang kasalukuyang hindi hihigit sa 5 volts. Sa kasong ito, ang isang kaso ay ginagamit para sa tatlong baterya ng daliri, na kabuuang 4.5 V.
Tulad ng para sa switch, naka-mount ito sa puwang ng positibong contact na nagmumula sa pinagmulan ng kuryente. Ang pulang kawad ay nakakabit sa board upang ma-pin ang SA1 (1), at ang itim na kawad upang mai-pin -4.5V.


Gayundin sa yugtong ito, maaari mong ikonekta ang mga motor, ang kanilang mga wire ay konektado sa mga contact M1 at M2.
Ikapitong hakbang. Pangwakas na yugto
Sa pangwakas na yugto, ang lahat ng mga elektronikong elemento ay kailangang maayos. Nakakabit sila sa disk gamit ang double-sided tape. Tulad ng para sa switch, kailangan din itong maayos, para dito maaari mong gamitin ang mainit na pandikit.

Iyon lang, ngayon handa na ang robot. Maaari mong subukang i-on ito at magbigay ng isang utos upang i-on ang paggamit ng anumang remote control.