
Ang isang ito ang robot kinokontrol ng bluetooth smartphone. Ang accelerometer ng smartphone ay sumusukat sa anggulo ng telepono sa kaliwa / kanan, pataas / pababa, ay gumagamit ng data na ito upang makalkula ang bilis ng mga direksyon ng mga makina, ang data ay ipinadala sa pamamagitan ng Bluetooth sa Arduino
Ano ang kailangan mo upang makabuo ng isang robot.
Arduino uno, HC-06 Bluetooth Module, dalawang 300 RPM 12v gear motor, H-tulay L298N Dual H Bridge Motor Controller
12 hanggang 1.3 Isang baterya ng lead acid. Ang bawat makina ay kumonsumo ng 0.4A, kasama ang pagkonsumo ng lohika ng driver. Ang mga wire ng Arduino, ordinaryong 9v na baterya at isang konektor para sa pagkonekta ng baterya sa Arduino. Mga de-koryenteng wire para sa pagkonekta sa mga driver ng motor na de koryente. Usb cable. Telepono gamit ang Android bersyon 4 at mas mataas. 4 na swivel 50mm gulong ng goma mula sa Screwfix o Toolstation; Dalawang Lynxmotion HUB-02 universal hub.










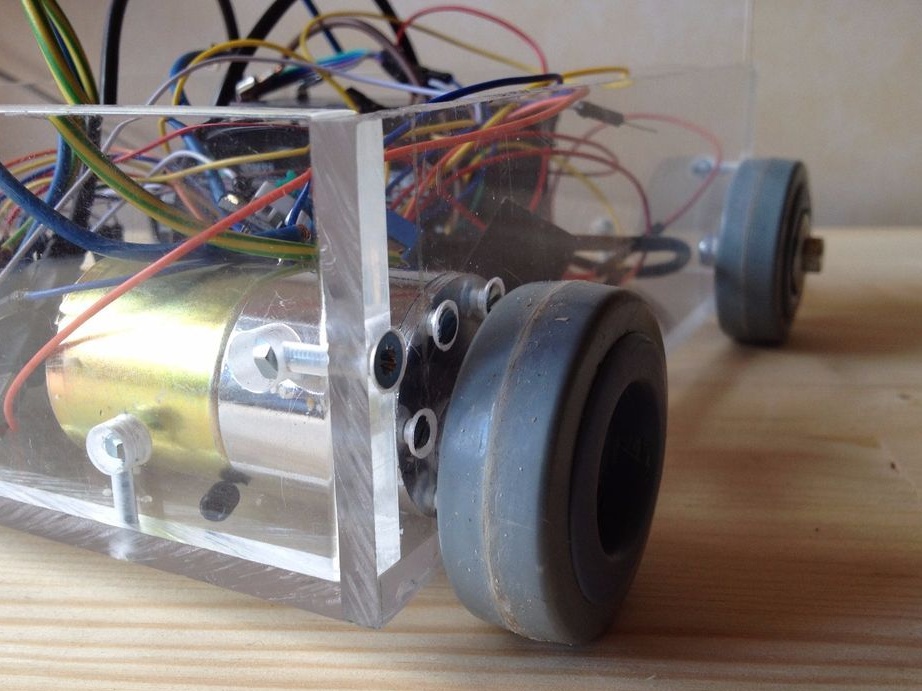
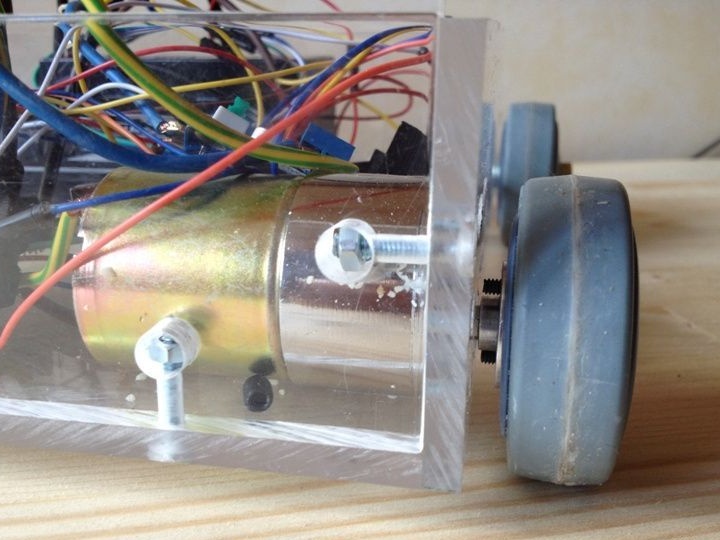
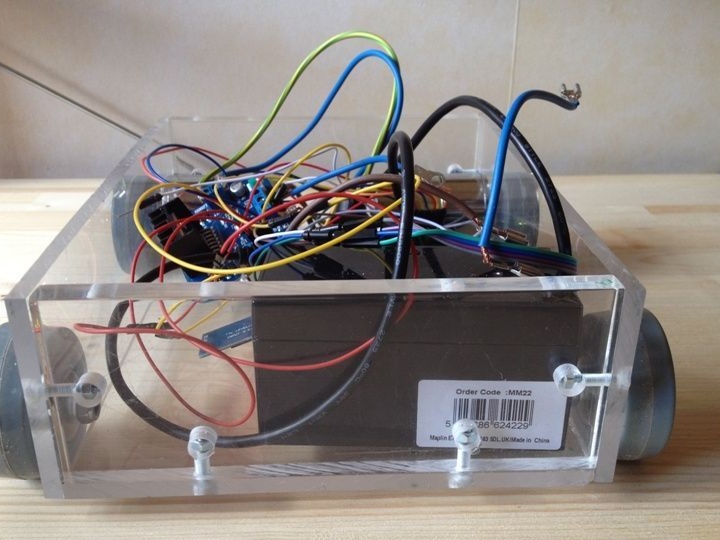
Ang kaso ay tipunin mula sa plastic na 22 cm ang haba at 17 cm ang lapad. Ang dalawang motor ay dapat na konektado sa baras at secure na may isang sinulid na pin.
Mga gulong sa harap
Ang goma ay tinanggal mula sa mga roller at dalawang butas ay drill sa kanila alinsunod sa mga butas sa mga hub. Ang mga hub ay naayos sa mga axes na dumadaan sa pabahay na may sinulid na mga pin. Pagkatapos nito, ang mga roller ay naayos sa mga hub, at ang goma ay inilalagay sa kanila.
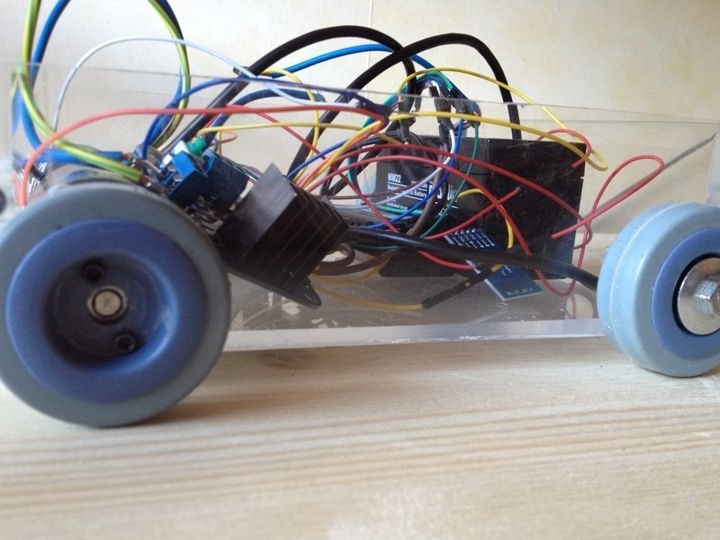
Mga gulong gulong
Ang mga gulong sa likuran ay simpleng hindi naka-save mula sa bisagra at na-secure sa pamamagitan ng mga butas na drill sa pabahay.
Mga Koneksyon sa Elektrikal.
Magkakaroon ng mga problema sa paglo-load ng code ng programa sa Arduino. Ito ay dahil sa ang katunayan na ang module ng Bluetooth, ang mga contact na RX \ TX, ay konektado sa mga Arduino pin 1 at 2, na ginagamit din upang ilipat ang data sa pamamagitan ng USB. Kinakailangan na baguhin ang mga contact 1 at 2 hanggang 11 at 12 sa konektadong library, na gagamitin para sa paglipat ng data.
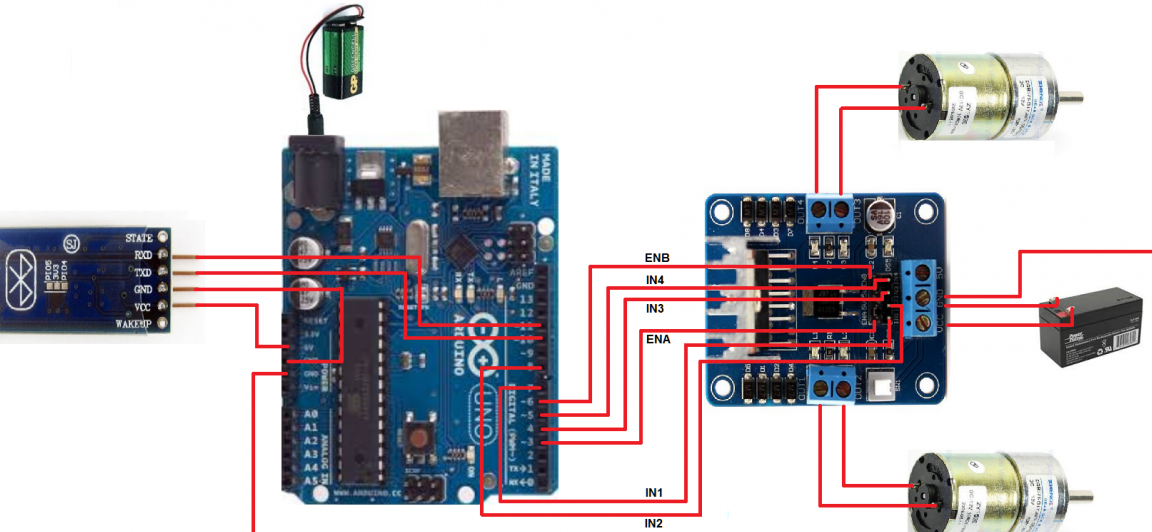
Ang motor driver ay hindi nangangailangan ng isang hiwalay na supply ng kuryente para sa lohika. Sapat na ang 12V upang ma-kapangyarihan ang lohika ng driver at ang mismong motor. Ang minus ng baterya ay dapat na konektado sa parehong Arduino at ang motor driver. Ang mga contact ng driver ng driver ng ECA / 5V at ENB / 5V ay maaaring maging jumpered. Dapat itong alisin bago kumonekta sa Arduino. Walang dapat na konektado sa dalawang 5V Pins.
Android code.
Ang nakalakip na file ay dapat na ma-unpack at mai-import sa Android Studio, i-pack ito sa apk at i-install sa telepono.
Mga pangunahing file:
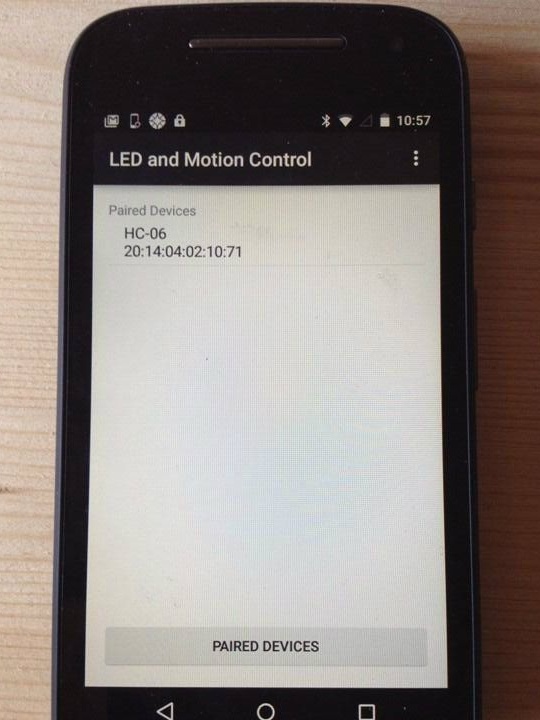
Aktibidad na Mga Paired na aparato
aparatoList.java
aktibidad_device_list.xml
Aktibidad ng Kontrol ng LED at Paggalaw:
pinangunahanControl.java
aktibidad_led_control.xml
Pinakikita:
AndroidManifest.xml
Nagpapakita ang Aktibong Paired Device ng magagamit na mga aparatong Bluetooth. Sa sandaling nakakonekta ang mga aparato, ang kontrol ay ililipat sa Aktibidad ng Pag-kontrol sa LED at Paggalaw.
Ang mga pindutan ng on / off ay nagpapadala ng isang "on" o "off" na mensahe sa Arduino, isara o nakabukas ang built-in na LED. Ang accelerometer ng telepono, na nagpapadala ng mga halaga ng x / y mula sa sensor, sa tuwing nagbabago ang mga halagang ito, kinokontrol ang kilusan. Batay dito, kinakalkula ng Arduino ang bilis at direksyon ng pag-ikot ng mga motor sa saklaw mula 0 hanggang 255. Nagpapadala ito ng mga halagang Arduino sa anyo ng 'L-255:' o 'R100', atbp. Batay dito, ipinapadala ng Arduino ang mga utos ng bilis ng pag-ikot ng kaliwang engine sa ENA, ang kanan sa ENB at binago ang direksyon ng pag-ikot sa pamamagitan ng pagbabago ng polarity sa IN1, IN2 para sa kaliwa, N3 at N4 para sa kanang makina.