
Mga materyales at tool:
- microcontroller Arduino (sa ito gawang bahay nalalapat Arduino Uno Rev 3);
- Dalawang servo mula sa Parallax;
- joystick (din mula sa Parallax);
- circuit board) maliit);
- konektor para sa koneksyon;
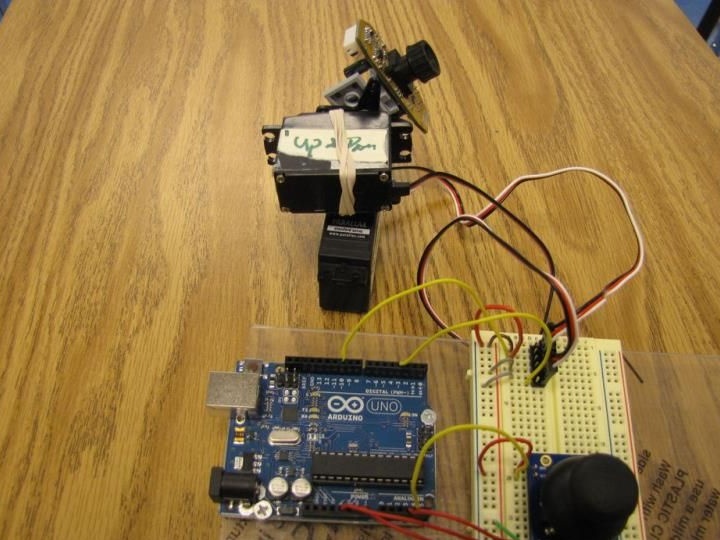
- Ang isang aparato para sa pagsubaybay sa paggalaw ng mga servomotor (isang sirang webcam at lego cubes ay ginagamit).
Proseso ng pagpupulong sa gawang bahay:
Unang hakbang. Ikinonekta namin ang mga servomotor
Ang proseso ng pagpupulong sa bahay ay nagsisimula sa pagkonekta sa mga servomotor. Upang mag-ipon ng isang paunang layout, ginagamit ang isang circuit board. Pagkatapos ay posible na gumawa ng isang hiwalay na kalasag. Sa figure maaari mong makita kung paano eksaktong nakakonekta ang lahat.
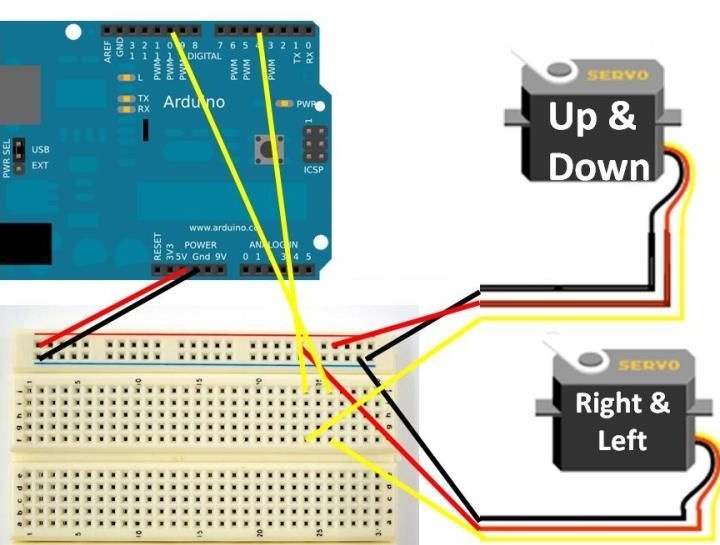
Ang pulang cable ay ang kapangyarihan, kumokonekta ito sa 5V pin sa Arduino controller.
Ang itim na kawad ay isang minus (ground), kumokonekta ito sa output ng Arduino na tinatawag na GND.
Ang dilaw na cable mula sa kanan at Kaliwa servomotor ay dapat na konektado sa pin 11. Sa ilang mga modelo, maaari itong maputi.
Ang isang katulad na dilaw na Up & Down cable ay dapat na konektado sa pin 4. Maaari rin itong maputi sa ilang mga modelo ng engine.
Mahalagang tandaan na ang mga konektor ng signal na ginamit upang makontrol ang motor ay nagmula sa mga output ng PWM.
Hakbang Dalawang Ikonekta ang joystick
Kung paano nakakonekta ang joystick ay makikita sa larawan. Sa una, ang pamamaraan ay maaaring mukhang kumplikado, ngunit sa katunayan walang kumplikado dito. Tulad ng mga motor, ginagamit ang isang wiring board dito.
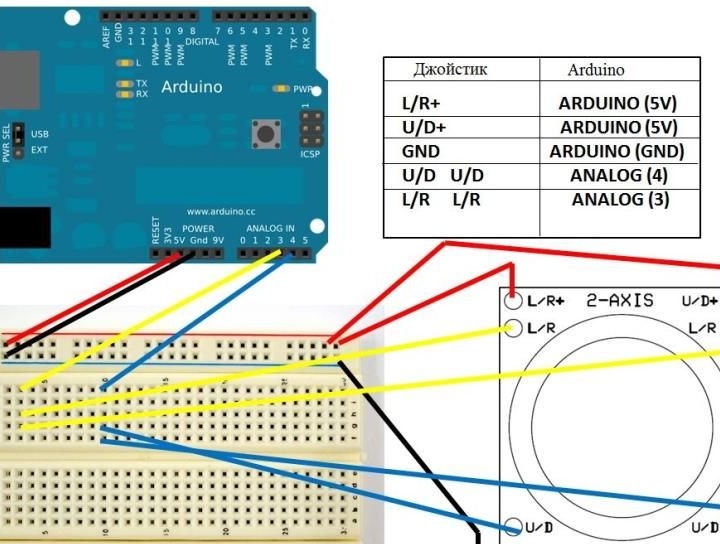
1. Sa module ng joystick, mahahanap mo ang mga output U / R + at L / R +. Sa pamamagitan ng mga output na ito, ang kapangyarihan ay konektado. Alinsunod dito, kailangan mong mag-apply ng + 5V boltahe mula sa kaukulang pin sa Arduino.
2. Mayroon ding dalawang konektor sa ilalim ng joystick na tinatawag na L / R at dalawang konektor ng U / D. Kailangan nilang konektado sa mga analog na output A3 at A4.
3. Buweno, sa konklusyon, ang lupa sa pamilihan ay dapat na konektado sa lupa sa Arduino.
Pagkatapos ng pagpupulong, ang koneksyon ay dapat na doble-tsek. Ito ay dahil sa mga pagkakamali sa koneksyon na sa karamihan ng mga kaso ay lumitaw ang mga problema. Ito ay totoo lalo na kung ang isang circuit board ay ginagamit at maraming mga koneksyon dito.
Hakbang TatlongSketch para sa Arduino
Ang code ay napaka-simple at naglalaman ng detalyadong mga komento. Ang code sa itaas ay kailangang kopyahin lamang sa Arduino IDE. Kapag ang code ay na-load, ang mga makina ay hindi dapat ilipat. Dapat lamang nilang simulan ang paglipat kapag pinindot ang pindutan sa joystick.
Ang mga problemang maaaring lumitaw at kung paano malutas ang mga ito
1. Kung hindi naka-on ang mga engine, i-double-check ang koneksyon. Ang mga output ng PWM ay ginagamit upang ikonekta ang mga motor, at ang mga analog na output ay ginagamit upang kumonekta sa mga joystick.
2. Ito ay nangyayari na kaagad pagkatapos na mai-load ang code, ang mga engine ay nagsisimulang manginig. Nangyayari ito kung hindi mo tama ikinonekta ang mga pin U / D + L / R +. Kailangang suriin nang mabuti ang koneksyon. Upang hindi masunog ang board sa panahon ng pagsubok, dapat itong mai-disconnect mula sa computer.
3. Kung ang lahat ay muling nasuri, ngunit ang mga makina ay hindi pa rin nais na gumana, maaari mong subukan ang muling pagkonekta sa joystick. Dapat itong alisin mula sa circuit board, at pagkatapos ay mai-install pabalik na may ilang pagsisikap. Ang mga konektor ng Joystick ay dapat na pumunta nang maayos sa layout.
Kung ang lahat ay naka-out, maaari mo nang simulan ang paglikha ng anumang mga gamit na gawa sa bahay na may kontrol sa pamamagitan ng joystick. Halimbawa, maaari kang gumawa ng isang robot na maaaring kontrolado ng isang joystick, at marami pa.