Sa susunod na Biyernes ng gabi, nais ng akda na mangolekta ng isang bagay na kawili-wili. Natatandaan na, nakita niya ang mga proyekto ng pagguhit ng mga robot, at pagkakaroon ng isang tuluy-tuloy na servo ng pag-ikot, napagpasyahan na tipunin ang naturang robot. Ang isang tuluy-tuloy na servo ng pag-ikot ay maaaring gawin mula sa ordinaryong.
Mga Materyales:
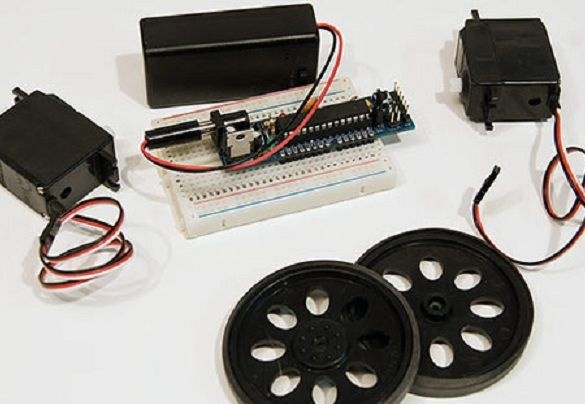
- DC Boarduino (ito ay isang clone Arduino)
- Servo ng patuloy na pag-ikot ng 2 piraso
- Servo gulong 2 mga PC
- tinapay
- 9V baterya konektor na may 2.1 mm plug at lumipat
- pagkonekta ng mga wire
Hindi kinakailangan na gamitin ang Boarduino sa proyektong ito, ang anumang board ng Arduino ay sapat na. Pinili ng may-akda ang board na ito dahil sa laki nito. Kakailanganin mo rin ang isang tiyak na bilang ng mga marker, maaari kang bumili ng isang hanay ng iba't ibang mga kulay para sa robot na ito.
Bilang karagdagan, kailangan mo ng isang baterya 9V at ang base para sa katawan ng robot ng pagguhit.
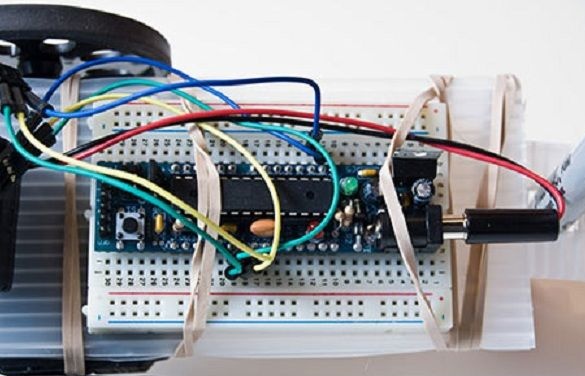
Walang kumplikado sa pagpupulong ng robot. Una sa lahat, ang may-akda ay i-fasten ang mga gulong na may dalawang servo na may malagkit na tape, at sinukat ang distansya sa pagitan ng mga gulong. Kinakailangan na ang lapad ng base ay bahagyang mas mababa sa distansya sa pagitan ng mga gulong. Gumagamit ang may-akda ng corrugated plastic, dahil medyo magaan at matibay ito, at hindi mahirap magtrabaho kasama ito. Ang paggamit nito, siyempre, ay hindi mahalaga, maaari mo ring gamitin ang karton o plastik mula sa mga kaso para sa mga disk.
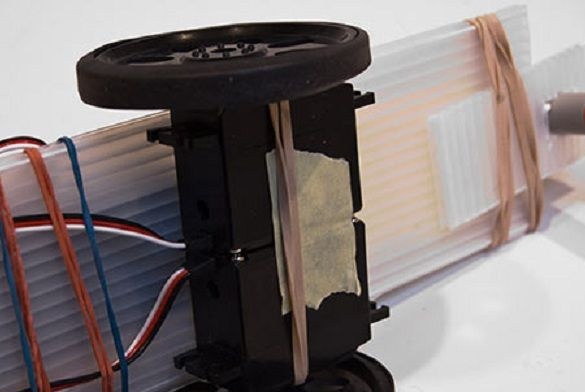
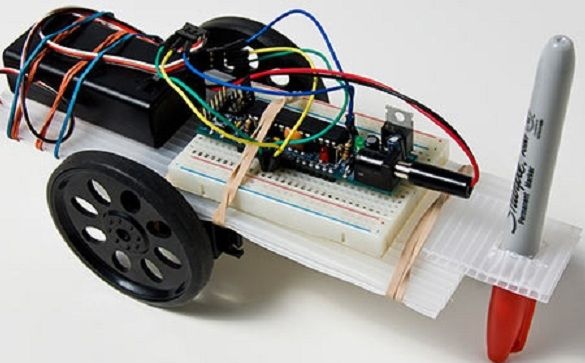
Ang mga drive ng servo ay konektado sa base na may mga bandang goma. Kapag inilalagay ang baterya at breadboard, lumitaw ang mga paghihirap, dahil kinakailangan upang mapanatili ang isang balanse. Nais ng may-akda na gumawa ng mas maraming puwang sa gilid kung saan inilagay ang marker, ngunit hindi nais na gumawa ng isang kalamangan sa kabaligtaran. Sa tulong ng mga bandang goma, medyo simple upang ayusin ang lokasyon ng mga bahagi, na tinutukoy ang pinakamainam.
Sa buong proyekto, ang mga wire na may mga BLS pin ay ginagamit upang kumonekta sa breadboard, ang mga servo drive ay konektado din sa kanila.
Nang natapos ng may-akda ang lahat ng gawain sa pag-iipon ng robot, nais niya agad na suriin ang pagganap nito. Ilang oras upang maghanap para sa code. Ang pagkakaroon ng natagpuan sa isang artikulo sa pagkontrol ng tuluy-tuloy na servo ng Parallax na gumagamit ng Arduino, natanto niya na nasa tamang track siya. Ang code ay pinasimple hangga't maaari, sa sandaling ang drawbot ay maaari lamang pumunta sa mga bilog.Siyempre, ito ay primitive, ngunit ito rin ay isang mahusay na pagsisimula at batayan para sa kaunlaran at modernisasyon. Maaaring ma-download ang code sa ilalim ng artikulo.
Ngayon ang may-akda ay nakatanggap ng isang robot na naglalakbay sa isang bilog. Ang pagpapatuloy ng gawain, kinuha ng may-akda ang mga labi ng corrugated plastic at gumawa ng isang butas sa loob nito sa tulong ng isang kutsilyo. Ang butas ay pinutol na may diameter na bahagyang mas maliit kaysa sa kinakailangan, salamat sa nabawasan na butas ang marker sa loob nito ay perpektong naka-attach. Kung gumagamit ka ng karton, kung gayon ang epekto ay hindi magiging, at ang marker ay hindi gaganapin nang maayos o mahuhulog.

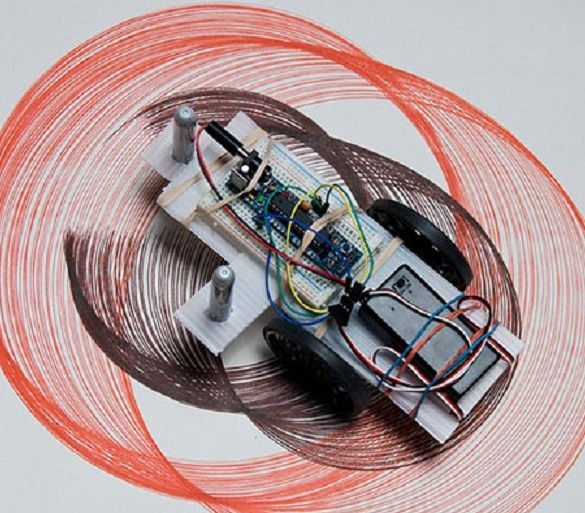
Matapos i-install ang marker, oras na upang masubukan ang robot. Sa pamamagitan ng pagtatakda nito sa gitna ng 24x18 sheet at i-on ito, sa wakas ay nakita ng may-akda ang pagkilos ni Drawbot. Sinimulan niyang iikot ang mga bilog ng pagguhit. Masasabi natin na ang may-akda ay pinamamahalaang lumikha ng isang robot na lumilikha ng isang uri ng gawa ng sining.
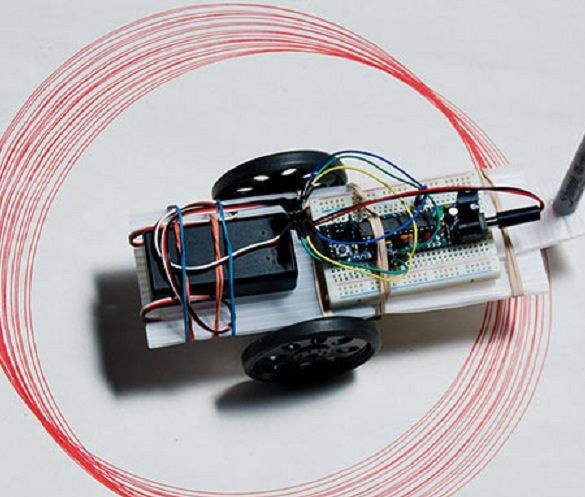
Ang larawan ay lumabas ng isang maliit na awkward dahil sa sheet na nakahiga sa sahig, at ito ay hindi masyadong kahit na, at malamang, ang mga servo ay hindi paikutin nang sabay-sabay. Ito ay lumiliko na ang isang bilog ay maaaring maging mas mababa, ang pangalawang mas mataas, at ang susunod pa ay medyo mas mataas o mas mababa. Marahil, sa isang perpektong lokasyon, ang lahat ng mga bilog ay nakahanay sa isang linya. Mukhang mas maganda ang hitsura nito.
Inisip ng may-akda na ang pangalawang marker ay maaaring lumiwanag ang sitwasyon, at ang robot gagawa ng mas kawili-wiling mga larawan. Maganda ang resulta, ang mga lupon ay nagsimulang magkatugma sa bawat isa. Ito ay magiging mas kawili-wiling makita kung paano kumilos si Drawbot sa isang malaking sheet ng papel.
Sa pamamagitan ng paglabas ng robot sa isang ibabaw ng papel, ang may-akda ay makakakuha ng isang bilog o isang bungkos ng mga bilog. Ngunit ang pagkakaroon ng isang yari na robot, maaari mo nang isipin ang tungkol sa pagpapabuti nito sa pamamagitan ng pagbabago ng code.