Sa kanyang pag-aaral, naglaro ang may-akda ng mga laro na may suporta sa accelerometer sa kanyang telepono. Talagang nagustuhan niya ang pagmamaneho ng kotse sa telepono sa pamamagitan lamang ng pagtagilid, at pagkatapos ay nagsimula siyang mangarap na gumawa ng kotse na may parehong kontrol sa totoong buhay. Ngayon ay mayroon Arduino at pagkakaroon ng nakuha na mga kasanayan sa pag-programming, oras na upang lumikha ng isang pinamamahalaang makina sa Android, tinawag niya itong Hercules.
Nakuha niya ang pangalang ito dahil sa napakalaking metalikang kuwintas at mataas na bilis. Model maaaring kontrolado gamit ang isang telepono sa Android sa pamamagitan ng Bluetooth. Ang anumang telepono na may ganitong operating system ay angkop para sa kontrol, ang may-akda ay hindi naglilimita sa isang remote control. Gayundin, gamit ang naka-save na pera ng telepono, dahil hindi ko kailangang gumastos ng pera sa paglikha ng isang remote control.
Mga materyales at tool:
- Arduino Uno
- Bluetooth transceiver
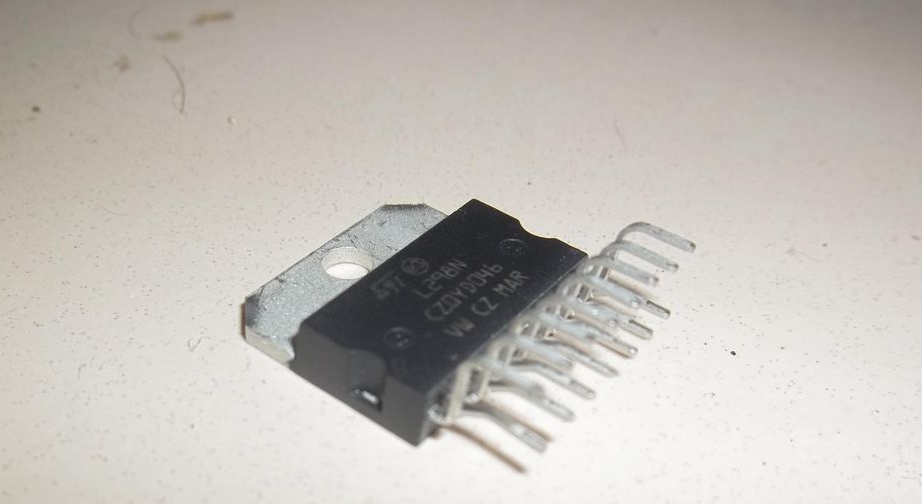
- driver ng Dual engine (na may L298 H-tulay)
- Mga Motors na may gears 4 na mga PC (napili ang kapangyarihan depende sa application ng makina)
- Mga gulong 4 na PC
- Baterya 1Ah SLA 12V
- Base para sa mga sangkap (tsasis)
- tinapay
- Mga kahon para sa pabahay 4 na mga PC
- switch ng SPST
- Pagkonekta ng mga wire para sa Arduino
- Mga wire ng kandila
- Mga mani at turnilyo ng isang maliit na sukat
- Resistor 10 kOhm 1 pc
- Resistor 20 kOhm 1 pc
- Android phone
- paghihinang bakal
- nagbebenta
- i-paste ang
- drill





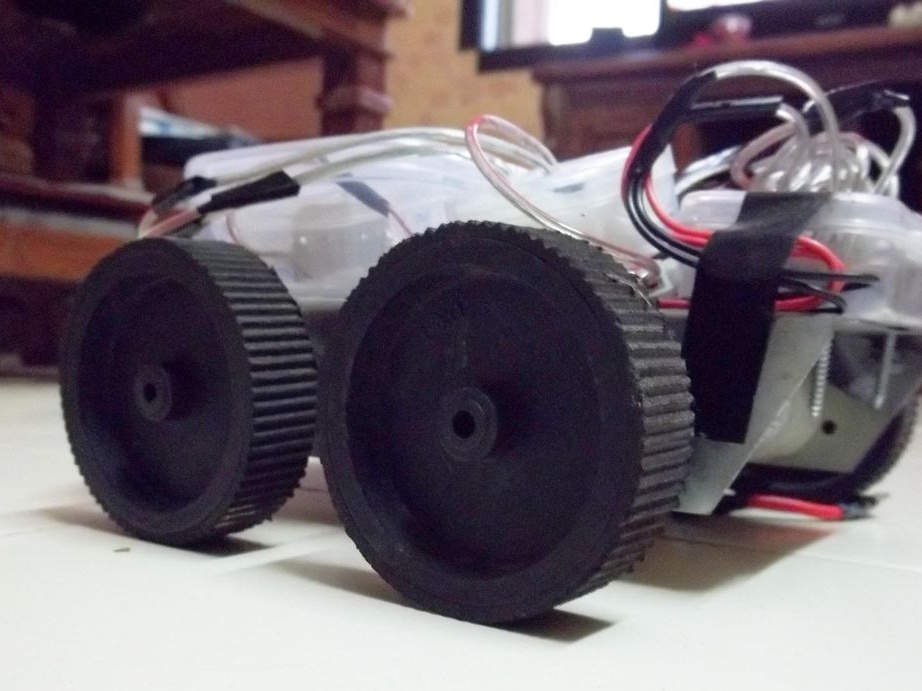
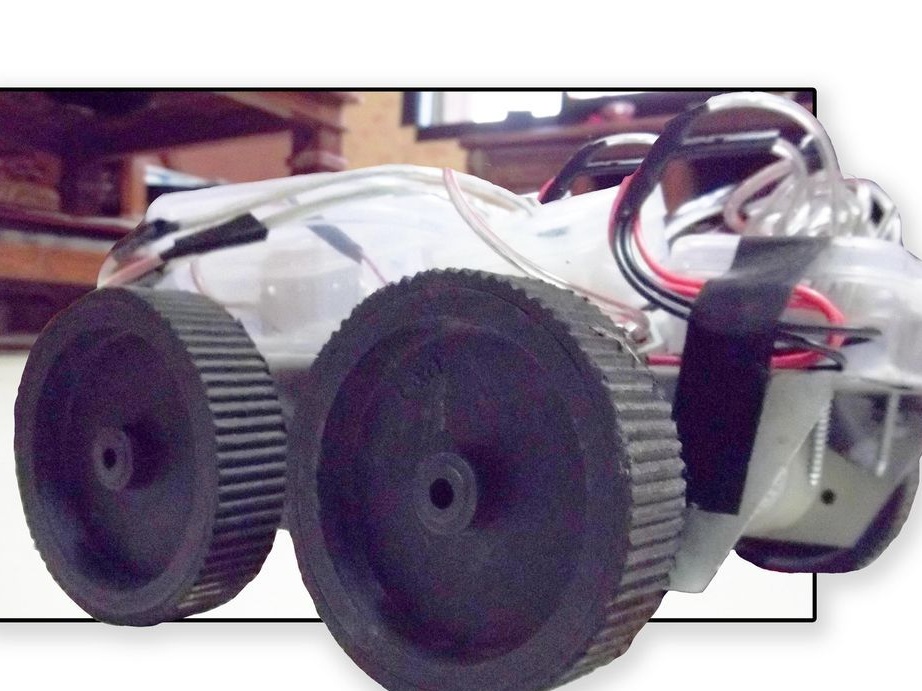
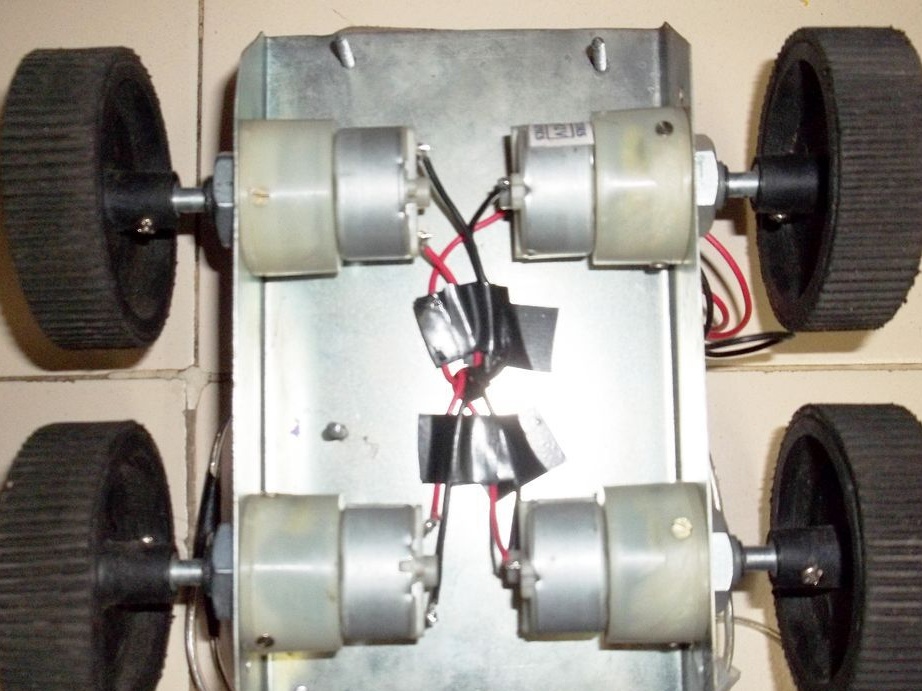
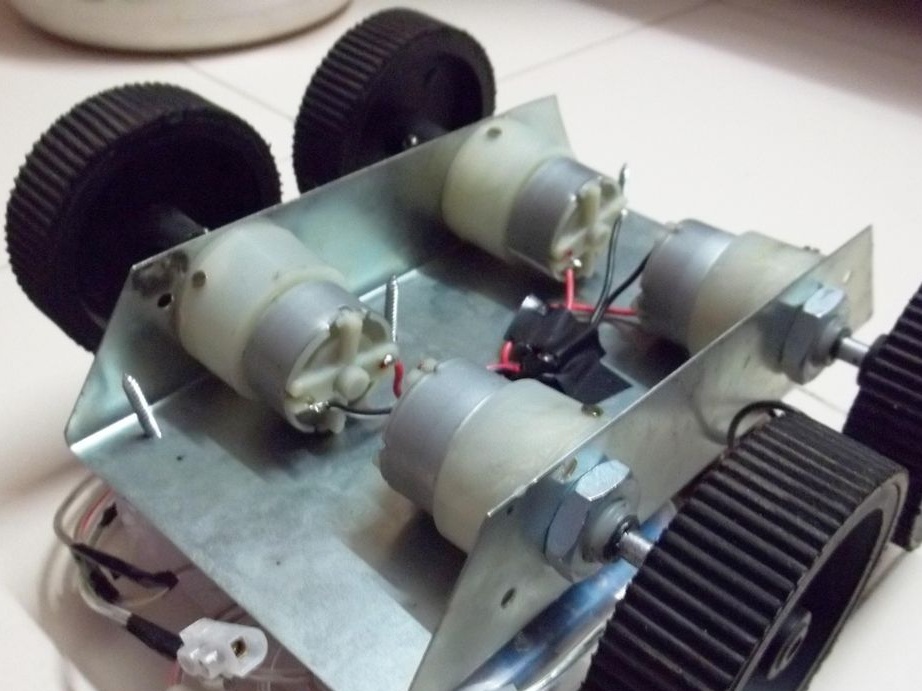
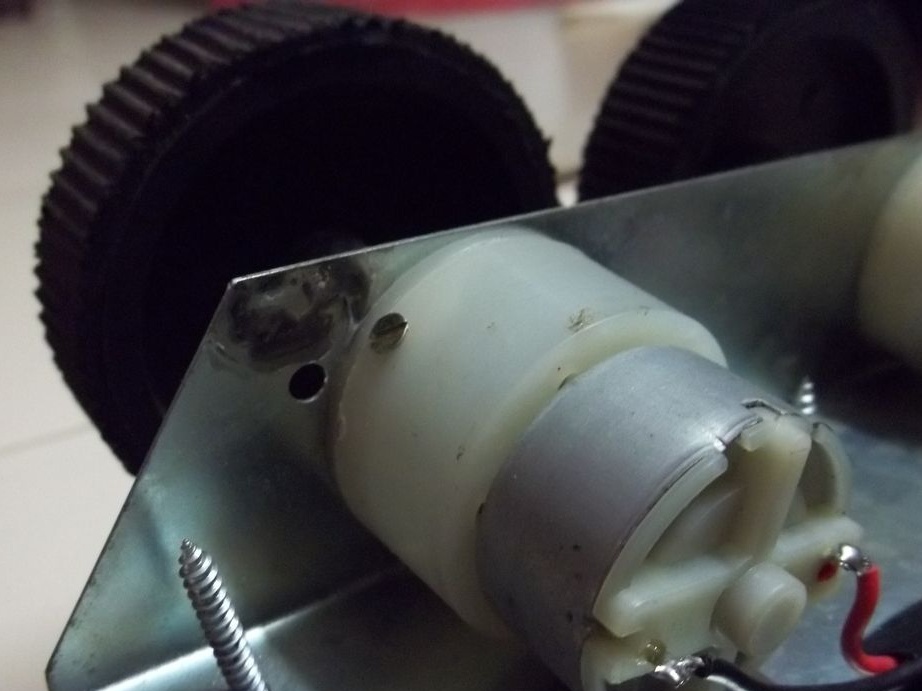
Unang hakbang. Mga gulong at tsasis.
Ang mga turnilyo ng engine ay naging madali upang mai-install ang mga ito sa tsasis gamit ang mga mani. Ang mga gulong ay naka-install nang buong paraan sa baras ng makina. Dalawang kanang motor ang nakabukas nang magkasama sa bawat isa, pati na rin ang dalawang kaliwa. Kung ano ang hitsura ng tsasis pagkatapos ng pag-install ng apat na gulong at engine ay makikita sa larawan sa ibaba.
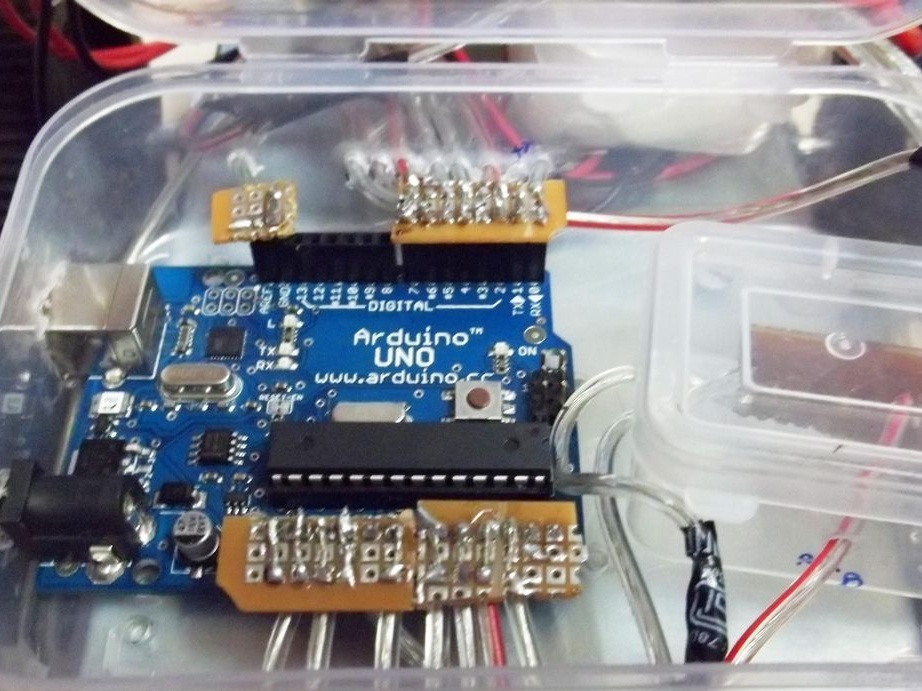
Hakbang Dalawang Pabahay para sa Arduino.
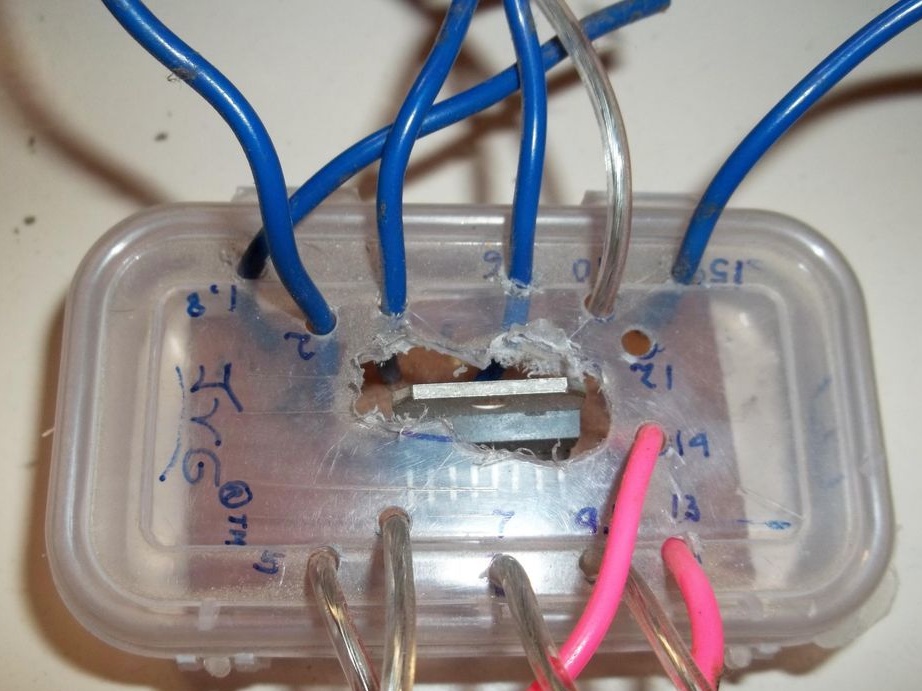
Ang diagram ng kaso para sa Arduino ay nahahati sa ilang mga bahagi. Ang ganitong isang modular na solusyon sa disenyo ay makakatulong sa hinaharap upang suportahan ang circuit, o alisin ang isang posibleng madepektong paggawa. Kung ang isa sa mga sangkap ay masira o masusunog, pagkatapos ay maaari itong mapalitan nang mabilis, at nang hindi masira ang disenyo. Ang kahon para sa Arduino ay nilikha tulad ng sumusunod:
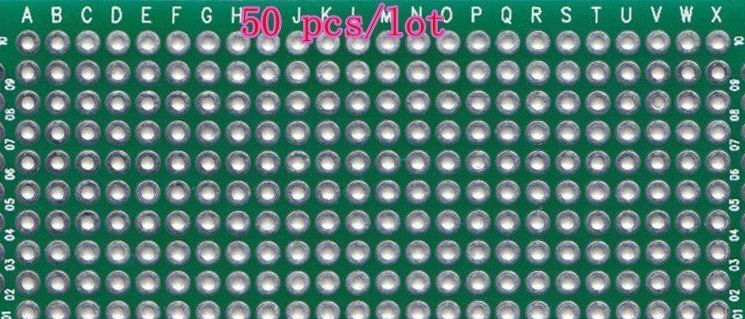
- Apat na bahagi ay pinutol mula sa breadboard, dalawa sa kanila na may 8x3 hole, ang pangalawang dalawang bahagi 6x3.
- Ang mga pin ng BLS ay ibinebenta sa bawat board sa mahabang panig.
- Ang bawat pin sa breadboard ay karagdagan na naibenta ng mga wire na halos 10 cm. Ginagawa ito upang ang mga wire ay hindi mapunta sa Arduino, dahil ngayon ang pag-load ay nagsimulang ibinahagi nang pantay-pantay.
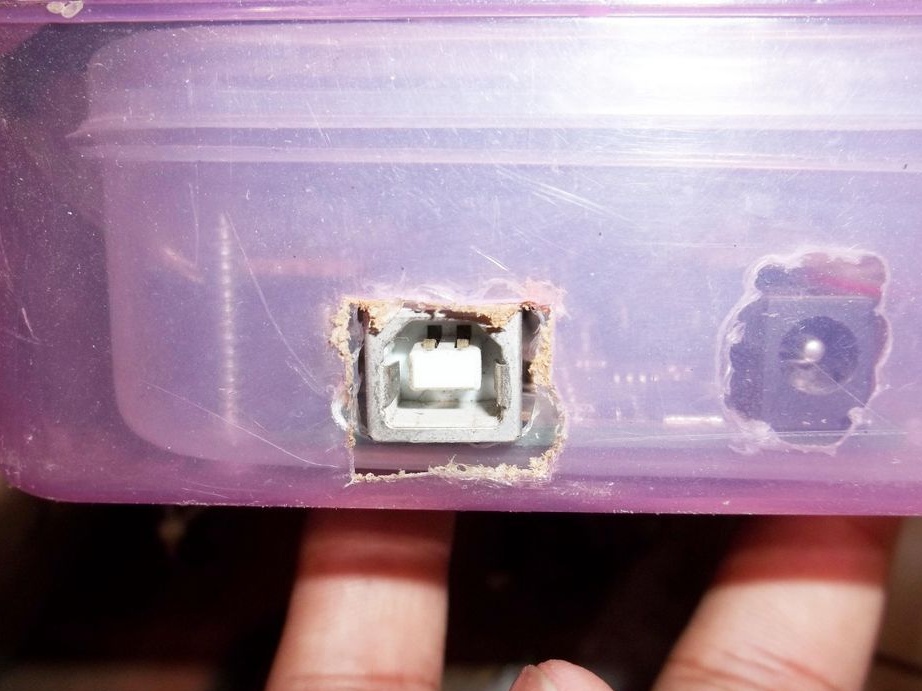
- Susunod, ang lupon ng Arduino ay inilagay sa kaso upang ang USB output ay humipo sa dingding. Ang isang butas ay naputol para sa output na ito, makakatulong ito upang mai-load ang mga karagdagang programa sa makina, o gumawa ng mga pagwawasto sa mga umiiral na. Sa mga gilid ng kahon, ang mga butas ay pinutol para sa mga wire na pupunta mula sa board. Ang mga karagdagang butas ay pinutol sa ilalim ng kahon, sa ilalim ng mga konektor ng Arduino na naka-mount.


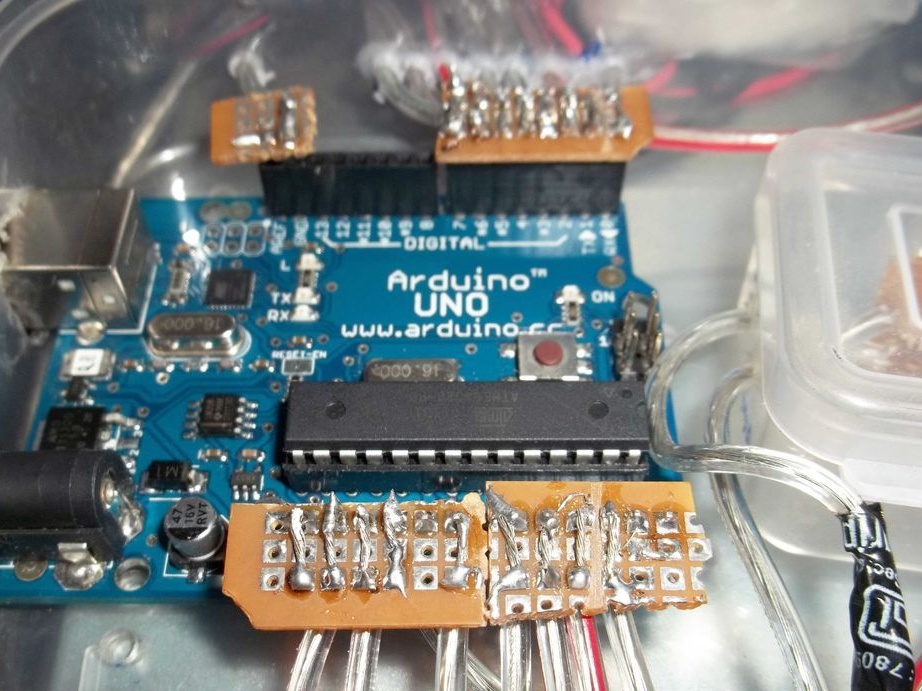
Hakbang Tatlong Bluetooth transceiver.
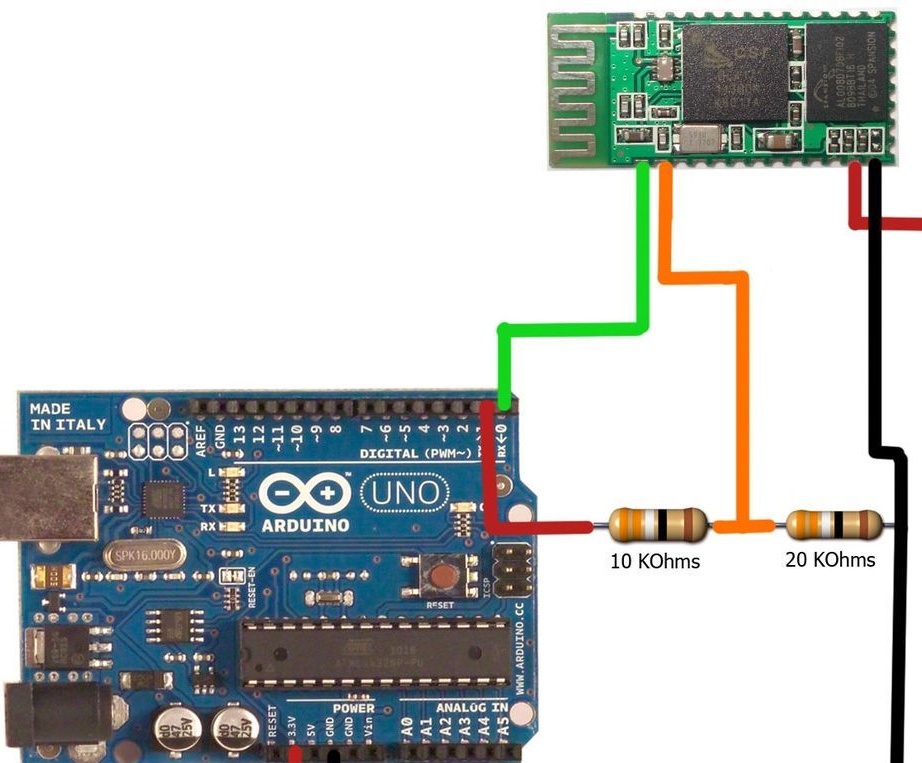
Ang paghihinang mga wire sa isang Bluetooth transceiver ay ang pinakamahirap na gawain sa pag-iipon ng proyektong ito, talagang kulang ang may-akda ng isang pangatlong kamay kapag nagbebenta. Apat na conductor na 10 cm ang ginamit, ibinebenta ang mga ito sa mga pin 1 (Tx), 2 (Rx), 12 (+ 3.3B) at 13 (GND). Ngayon ang transceiver ay maaaring mailagay sa isang pabahay na may pre-handa na mga butas para sa mga wire. Ang may-akda ay nakadikit ang mga wire sa kahon upang maiwasan ang mga wires na hindi mapunit ang mga contact.



Ang ikaapat na hakbang. Pabahay para sa mga resistors.
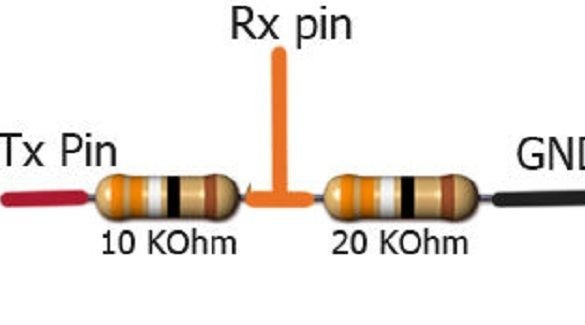
Dahil sa ang katunayan na ang output ng Arduino Tx ay nagpapadala ng isang senyas na may boltahe ng 5V, at ang module ng Bluetooth ay gumagana sa isang boltahe na 3.3V, kinakailangan upang i-convert ang 5V sa 3.3V. Para sa gawaing ito, ginamit ng may-akda ang isang divider ng boltahe. Ayon sa circuit na ibinigay sa ibaba, naibenta niya ang isang risistor sa natitirang piraso ng tinapay. Siyempre, posible na ilagay ang circuit na ito sa isang kaso ng Arduino, ngunit walang sapat na espasyo, kaya ang may-akda ay gumawa ng isang hiwalay para sa mga resistors.


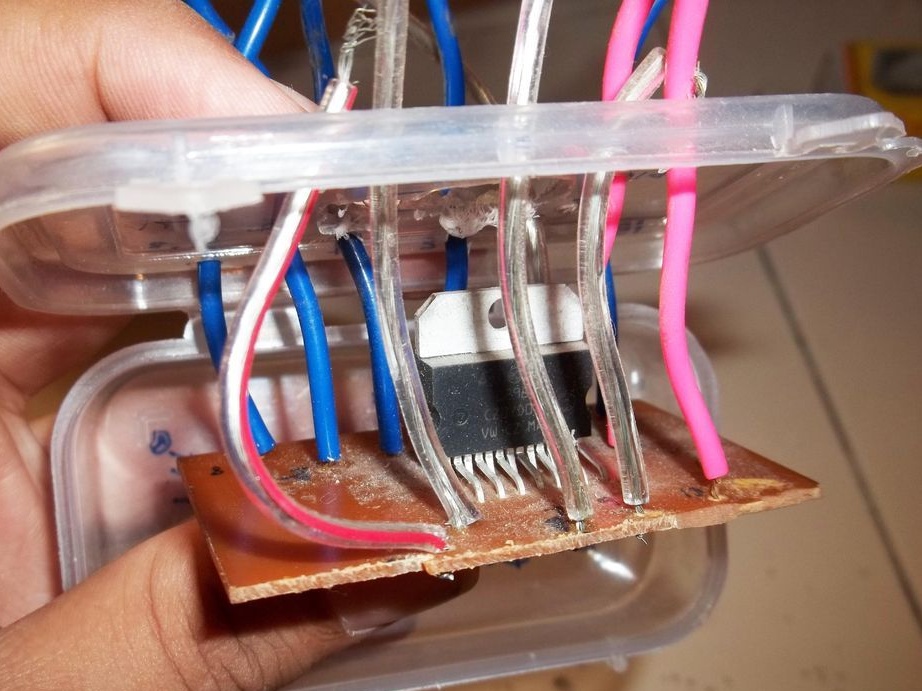
Hakbang Limang Engine driver.
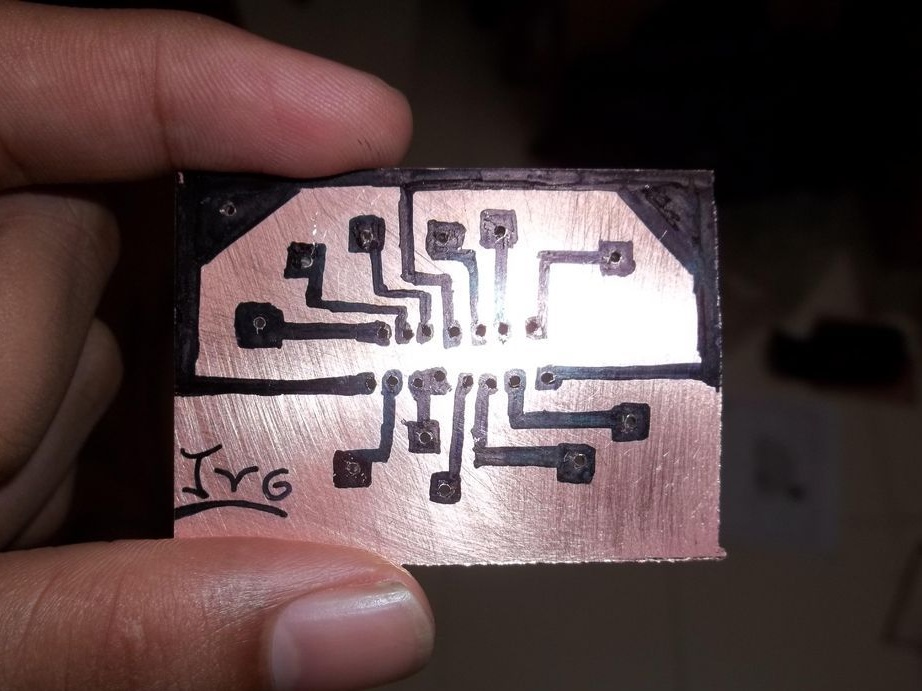
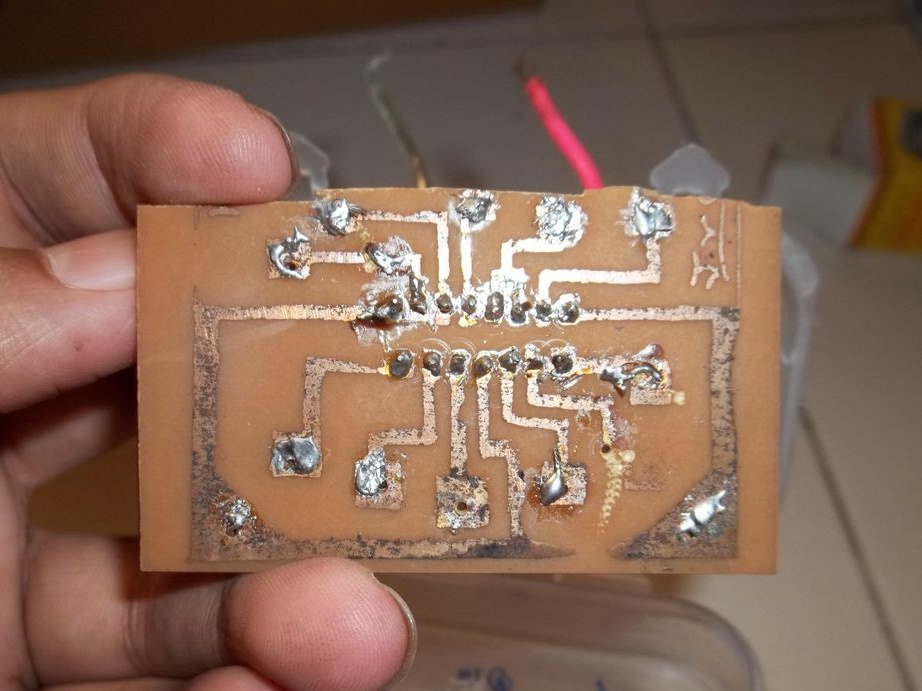
Gumagamit ang may-akda ng isang dalawahan na driver na may isang H-tulay na L298 IC, kontrolado niya ang apat na makina. Para sa kanya, ang may-akda ay lumikha ng isang board upang mapadali ang paghihinang mga wire sa kanya, ang board mismo sa larawan sa ibaba. Matapos ang paghihinang, ang driver ay inilagay din sa isang hiwalay na kaso na may mga butas para sa mga wire.
Hakbang Anim Ang panghuling pagpupulong.
Ang bawat indibidwal na sangkap ay konektado sa Arduino alinsunod sa pamamaraan.
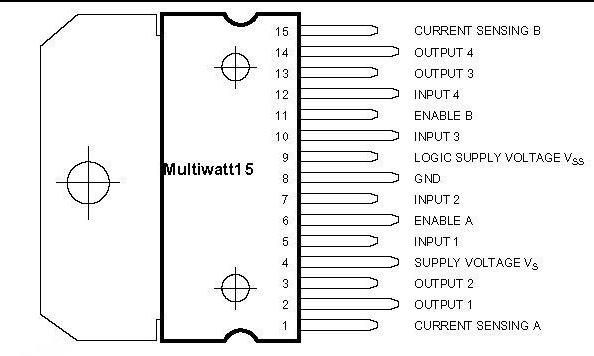
Ang pagkonekta sa driver ng engine kasama si Arduino ay naganap ayon sa pinout na ito:
1 hanggang GND
2 sa unang contact ng kaliwang motor
3 hanggang sa pangalawang contact ng kaliwang motor
4 hanggang baterya ng 12V
5 hanggang pin Arduino 2
6 sa pin Arduino 3
7 hanggang pin Arduino 4
8 hanggang GND
9 hanggang 5V kasama si Arduino
10 hanggang pin Arduino 5
11 upang i-pin ang Arduino 6
12 hanggang sa pin Arduino 7
13 sa unang contact ng tamang motor
14 hanggang sa pangalawang contact ng tamang motor
15 hanggang GND
Ang kapangyarihan ng 12V ay konektado sa Vin Arduino pin at pin 4 ng L298. Ayon sa pagkakabanggit sa GND Arduino ayon sa power supply ng GND.
Ikapitong hakbang. Program para sa Arduino.
Para gumana nang maayos ang programa, kinakailangan upang mai-install ang library ng Amarino, na maaaring ma-download. Maaari mong i-download ang source code para sa Arduino sa ilalim ng artikulo.
Hakbang Walong. Software para sa Android
Ang Amarino Library ay isang toolkit para sa pagtatrabaho sa mga smartphone sa Android. Sa pamamagitan ng pag-install ng isang karagdagang application sa iyong telepono, maaari mong simulan ang pagsusulat ng isang programa.
Ma-download mula sa. Matapos i-install ang mga ito sa telepono, nanatili lamang ito upang i-on ang makina at kumonekta dito, at piliin ang seksyon ng Magdagdag ng Mga Kaganapan-> Accelerometer Sensor.
Video na may pag-install ng Amarino at ang mga plugin nito:
Ang bilis ng makina ay katumbas ng pagtabingi ng telepono. Kung ang makina ay gumagalaw sa maling direksyon, kailangan mong palitan ang mga wire mula sa mga makina.